博客地址:https://www.cnblogs.com/zylyehuo/
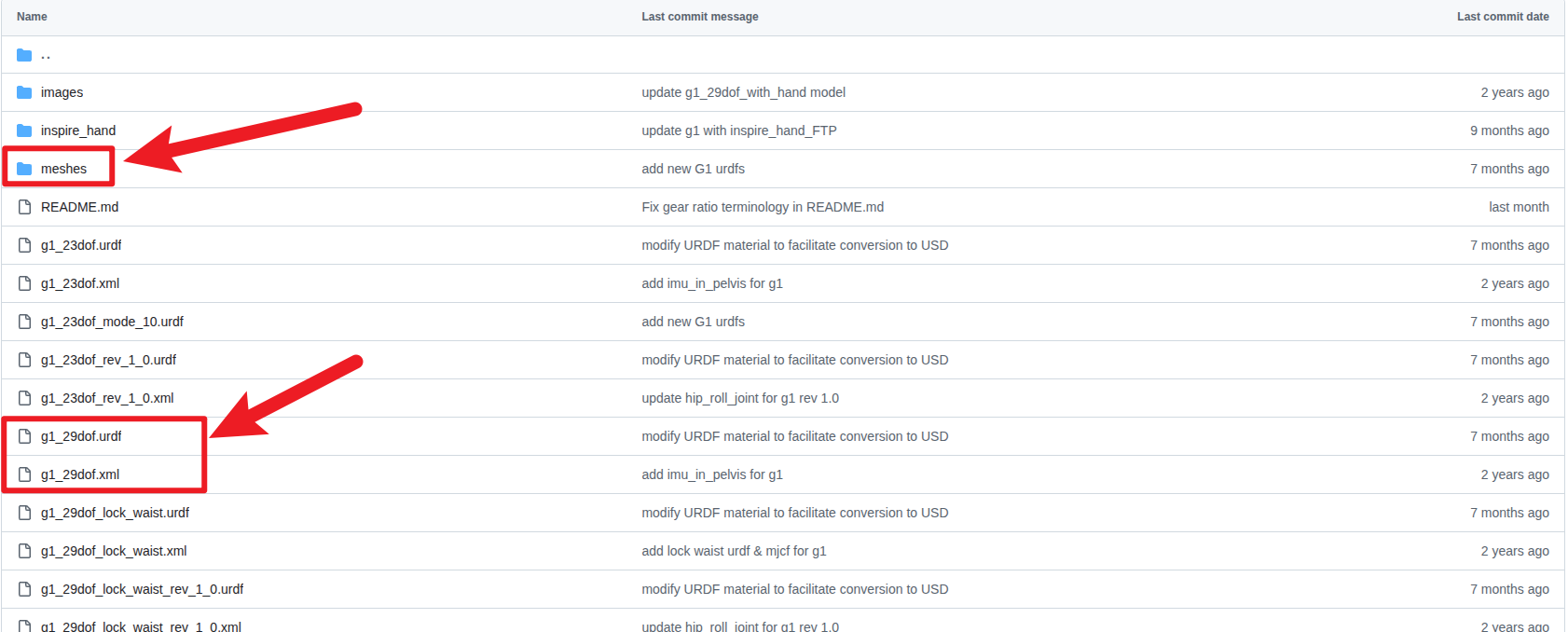
Unitree G1 模型文件下载地址(挑选自己需要的部分,本教程基于 g1_29dof.urdf (以及 .xml 和 meshes 文件夹))
有核心的 URDF 文件和 Meshes (STL 网格文件)
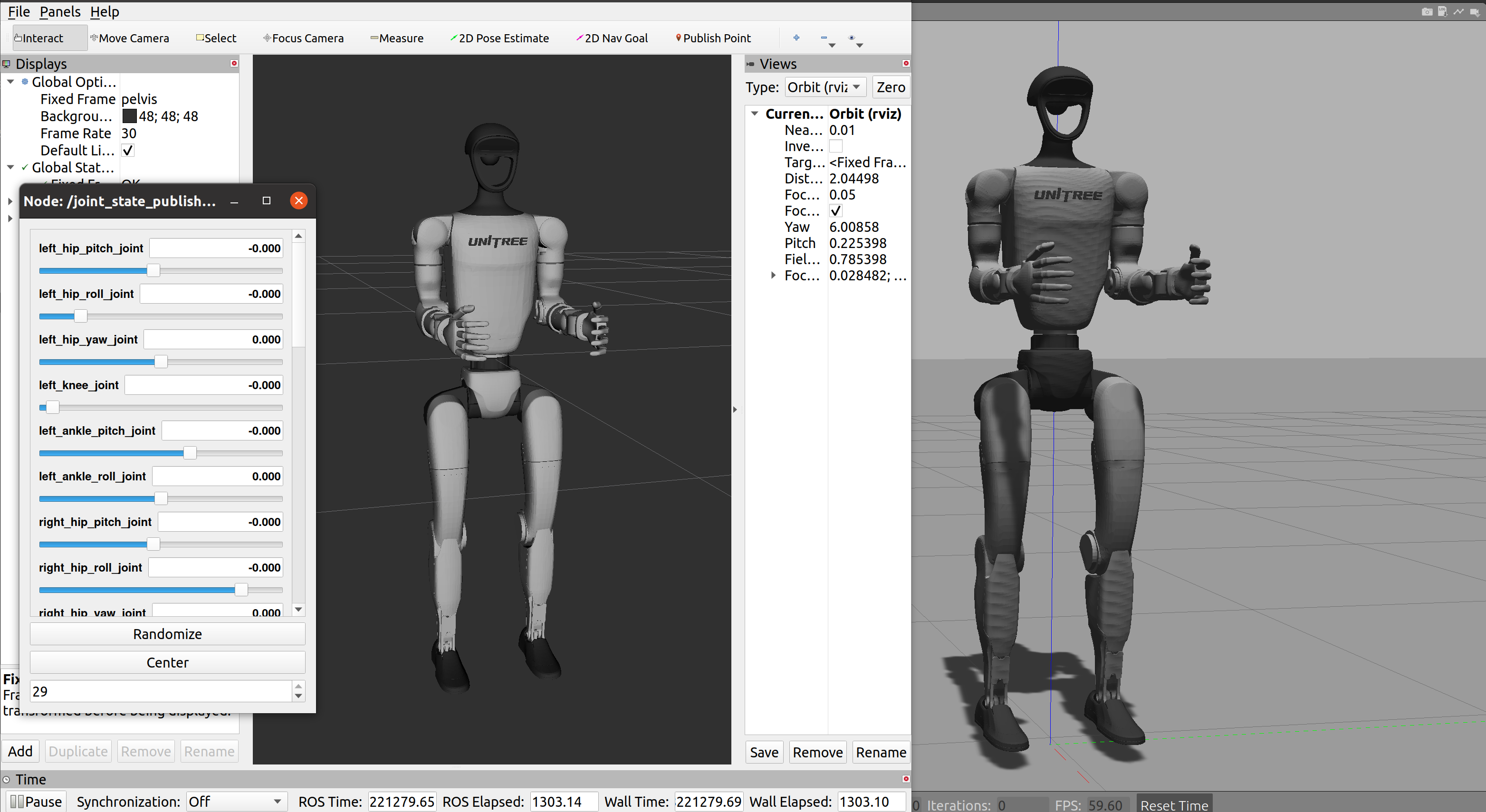
效果预览
第一步:建立工作空间与目录结构
# 1. 创建工作空间 (如果已有 workspace 可跳过)
mkdir -p ~/g1_ws/src
cd ~/g1_ws/src
# 2. 创建包目录 (必须叫 g1_description)
mkdir -p g1_description/urdf
mkdir -p g1_description/meshes
mkdir -p g1_description/launch将 g1_29dof.urdf (以及 .xml) 放入 ~/g1_ws/src/g1_description/urdf/
将所有 .STL 文件放入 ~/g1_ws/src/g1_description/meshes/
为 URDF 文件添加 Gazebo 标签,添加颜色
~/g1_ws/src/g1_description/urdf/g1_29dof.urdf
粘贴到 g1_29dof.urdf 文件末尾(在最后一行的 标签之前)
<gazebo reference="pelvis">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="left_hip_pitch_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="left_ankle_roll_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="right_hip_pitch_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="right_ankle_roll_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="logo_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="head_link">
<material>Gazebo/DarkGrey</material>
</gazebo>
<gazebo reference="pelvis_contour_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_hip_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_hip_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_knee_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_ankle_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_hip_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_hip_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_knee_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_ankle_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="waist_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="waist_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="torso_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="waist_support_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_shoulder_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_shoulder_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_shoulder_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_elbow_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_wrist_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_wrist_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_wrist_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="left_rubber_hand">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_shoulder_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_shoulder_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_shoulder_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_elbow_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_wrist_roll_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_wrist_pitch_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_wrist_yaw_link">
<material>Gazebo/Grey</material>
</gazebo>
<gazebo reference="right_rubber_hand">
<material>Gazebo/Grey</material>
</gazebo>第二步:补充缺失的系统文件
~/g1_ws/src/g1_description/package.xml
<?xml version="1.0"?>
<package format="2">
<name>g1_description</name>
<version>0.0.1</version>
<description>The g1_description package</description>
<maintainer email="user@todo.todo">User</maintainer>
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<depend>roscpp</depend>
<depend>rospy</depend>
<depend>std_msgs</depend>
<depend>urdf</depend>
<depend>xacro</depend>
<exec_depend>gazebo_ros</exec_depend>
<exec_depend>joint_state_publisher</exec_depend>
<exec_depend>robot_state_publisher</exec_depend>
<exec_depend>rviz</exec_depend>
<export>
<gazebo_ros gazebo_model_path="${prefix}/.."/>
</export>
</package>~/g1_ws/src/g1_description/CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(g1_description)
find_package(catkin REQUIRED COMPONENTS
urdf
xacro
)
catkin_package()
# 安装路径设置,确保launch和meshes能被找到
install(DIRECTORY launch meshes urdf
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)第三步:解决网格路径问题
RDF 文件通常写死了网格路径。如果您的 URDF 是从其他地方导出的,它可能写的是 file:///home/xxx/... 或者 package://g1_description/...
为了确保不报错,执行以下检查:
-
打开 urdf/g1_29dof.urdf。
-
搜索 <mesh filename="...">。
修改路径:确保所有路径都以 package://g1_description/meshes/ 开头。
-
错误示例: filename="D:/downloads/meshes/pelvis.STL"
-
正确示例: filename="package://g1_description/meshes/pelvis.STL"
(可以使用 VS Code 的"全部替换"功能)
第四步:编写 RViz 启动文件
~/g1_ws/src/g1_description/launch/display.launch
<launch>
<param name="robot_description" textfile="$(find g1_description)/urdf/g1_29dof.urdf" />
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find g1_description)/launch/g1.rviz" />
</launch>第一次运行时 RViz 可能会报错找不到配置,这是正常的,需要手动添加 RobotModel
第五步:编写 Gazebo 启动文件
~/g1_ws/src/g1_description/launch/gazebo.launch
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="true"/> <arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
</include>
<param name="robot_description" textfile="$(find g1_description)/urdf/g1_29dof.urdf" />
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-file $(find g1_description)/urdf/g1_29dof.urdf -urdf -z 0.79 -model g1_robot" output="screen" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>第六步:编译并运行
cd ~/g1_ws
catkin_make
source devel/setup.bash运行 RViz 可视化
roslaunch g1_description display.launch-
在 RViz 左侧点击 "Add" -> "RobotModel"。
-
将 "Fixed Frame" 修改为 URDF 中的根链接名称(通常是 base_link 或 pelvis)。
-
现在应该能看到机器人,并可以通过小窗口滑动条动它的关节。
运行 Gazebo 仿真
roslaunch g1_description gazebo.launchGazebo 打开后,点击底部的 "Play" 按钮。
- 预期结果:机器人会出现在世界中。因为没有写控制算法,受重力影响,它可能会直接跪下或倒下。