博客地址:https://www.cnblogs.com/zylyehuo/
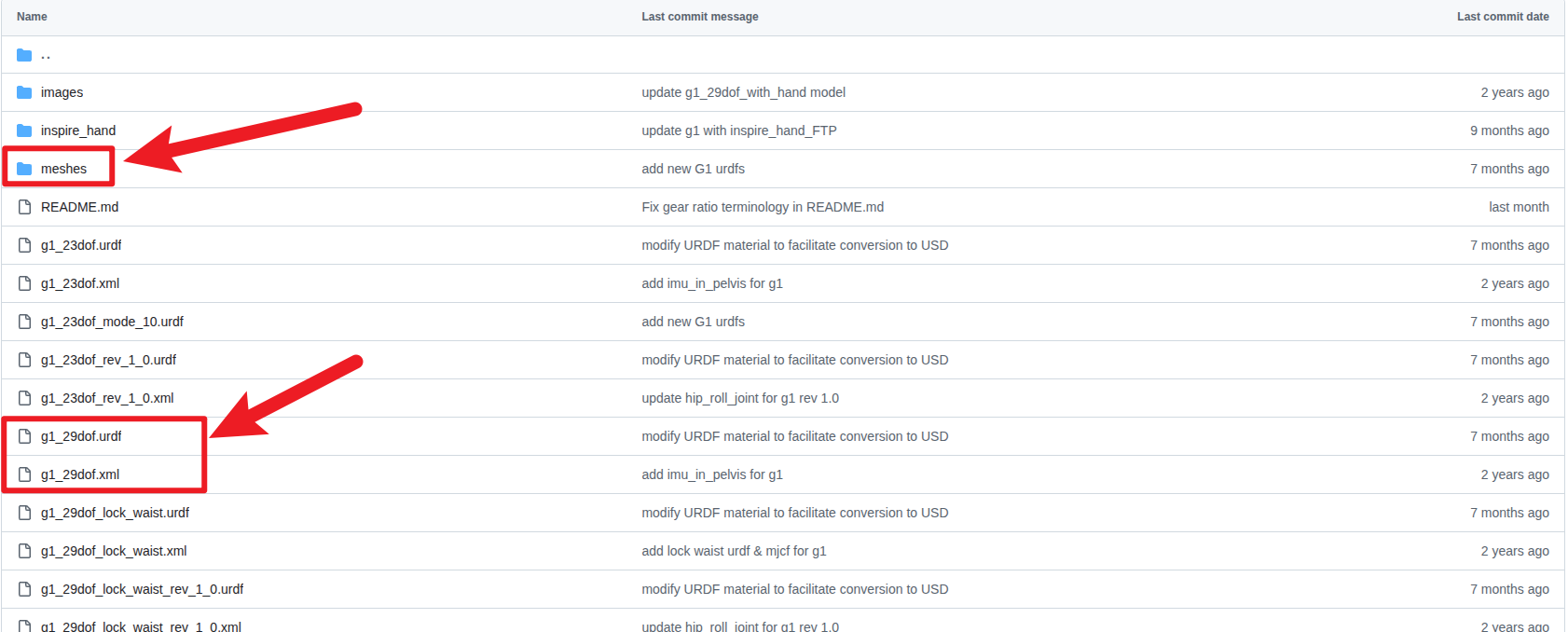
Unitree G1 模型文件下载地址(挑选自己需要的部分,本教程基于 g1_29dof.urdf (以及 .xml 和 meshes 文件夹))
有核心的 URDF 文件和 Meshes (STL 网格文件)
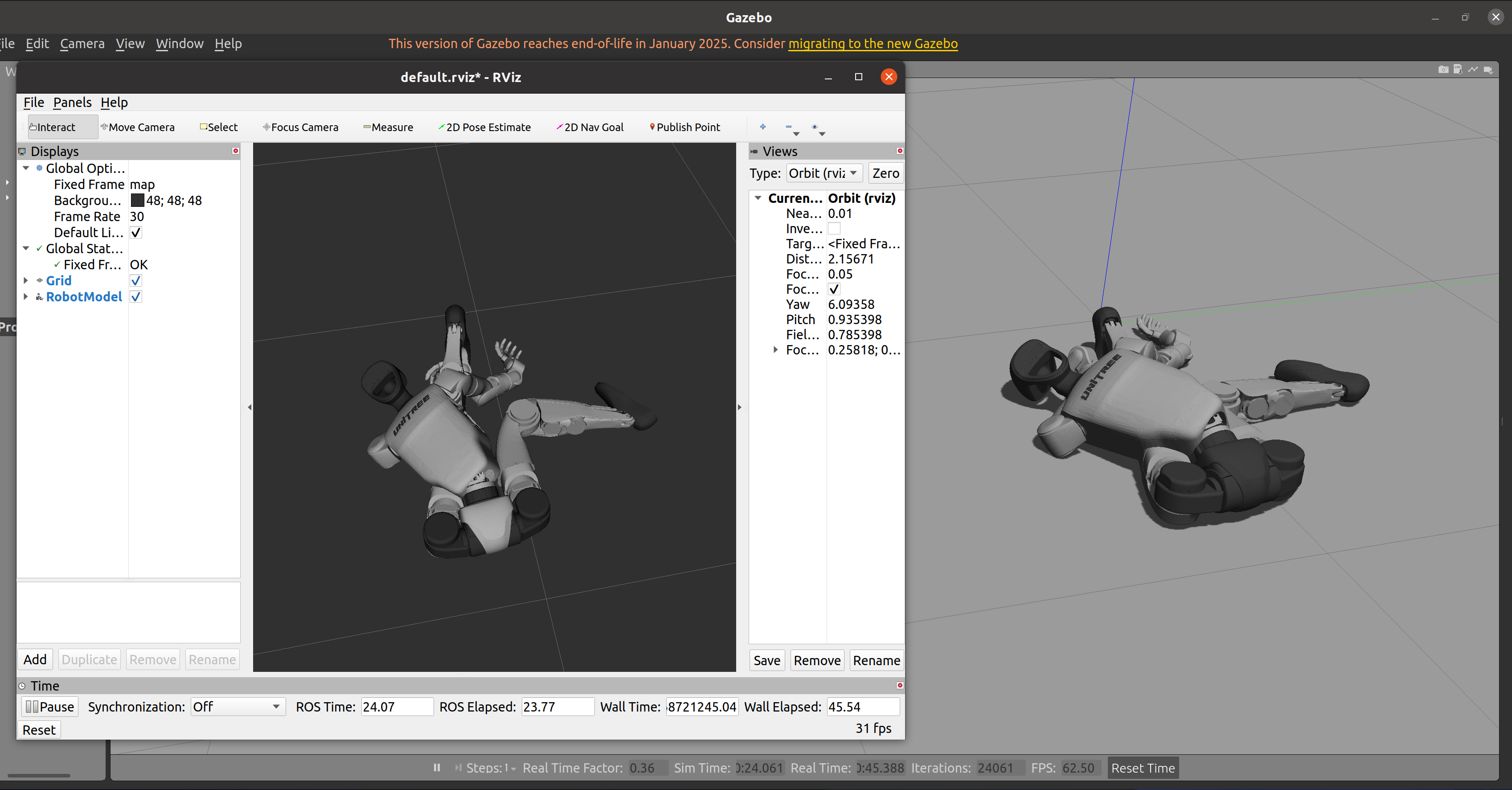
效果预览
工作空间结构
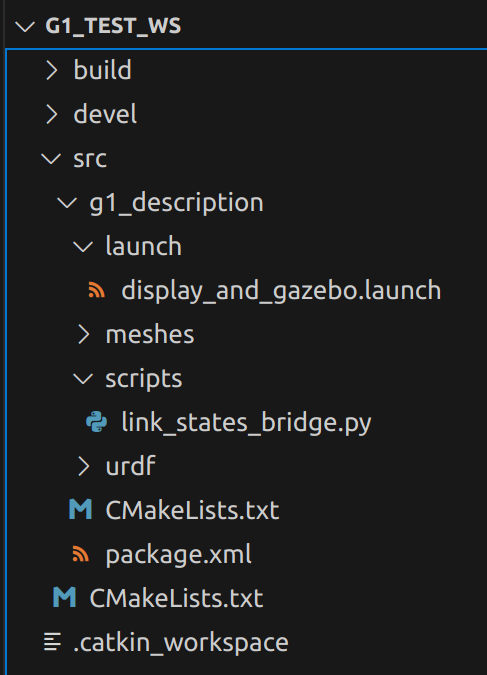
主要文件
display_and_gazebo.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<!-- 加载机器人URDF模型参数 -->
<param name="robot_description" textfile="$(find g1_description)/urdf/g1_29dof.urdf" />
<!-- TF静态变换 -->
<node pkg="tf" type="static_transform_publisher" name="world_to_map" args="0 0 0 0 0 0 1 world map 10"/>
<!-- base_link和pelvis重合 - 静态 -->
<node pkg="tf" type="static_transform_publisher" name="base_link2pelvis" args="0.0 0.0 0.0 0.0 0.0 0.0 1 base_link pelvis 100" />
<!-- 移除静态的map2base_link,改为动态TF -->
<node pkg="tf" type="static_transform_publisher" name="imu_in_torso2body_imu" args="0.0 0.0 0.0 0.0 0.0 0.0 1 imu_in_torso body_imu 100" />
<!-- 机器人状态发布器 -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- LinkStates到JointState的桥接,同时发布动态TF -->
<node name="link_states_bridge" pkg="g1_description" type="link_states_bridge.py" output="screen" />
<!-- RViz -->
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen" />
<!-- ============ Gazebo配置 ============ -->
<!-- 启动Gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
</include>
<!-- 将机器人模型生成到Gazebo中 -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model"
args="-param robot_description -urdf -z 0.79 -model g1_robot"
output="screen" />
</launch>link_states_bridge.py
python
#!/usr/bin/env python3
import rospy
import math
from gazebo_msgs.msg import LinkStates
from sensor_msgs.msg import JointState
import numpy as np
from scipy.spatial.transform import Rotation
import threading
import tf
from geometry_msgs.msg import TransformStamped
class LinkStatesToJointState:
def __init__(self):
rospy.init_node('link_states_to_joint_state')
# 订阅Gazebo的链接状态
self.link_states_sub = rospy.Subscriber('/gazebo/link_states', LinkStates, self.link_states_callback, queue_size=1)
# 发布joint_states
self.joint_states_pub = rospy.Publisher('/joint_states', JointState, queue_size=1)
# 发布TF变换
self.tf_broadcaster = tf.TransformBroadcaster()
# 所有关节及其parent/child链接映射
self.joints_info = {
'left_hip_pitch_joint': ('pelvis', 'left_hip_pitch_link', [0, 1, 0]),
'left_hip_roll_joint': ('left_hip_pitch_link', 'left_hip_roll_link', [1, 0, 0]),
'left_hip_yaw_joint': ('left_hip_roll_link', 'left_hip_yaw_link', [0, 0, 1]),
'left_knee_joint': ('left_hip_yaw_link', 'left_knee_link', [0, 1, 0]),
'left_ankle_pitch_joint': ('left_knee_link', 'left_ankle_pitch_link', [0, 1, 0]),
'left_ankle_roll_joint': ('left_ankle_pitch_link', 'left_ankle_roll_link', [1, 0, 0]),
'right_hip_pitch_joint': ('pelvis', 'right_hip_pitch_link', [0, 1, 0]),
'right_hip_roll_joint': ('right_hip_pitch_link', 'right_hip_roll_link', [1, 0, 0]),
'right_hip_yaw_joint': ('right_hip_roll_link', 'right_hip_yaw_link', [0, 0, 1]),
'right_knee_joint': ('right_hip_yaw_link', 'right_knee_link', [0, 1, 0]),
'right_ankle_pitch_joint': ('right_knee_link', 'right_ankle_pitch_link', [0, 1, 0]),
'right_ankle_roll_joint': ('right_ankle_pitch_link', 'right_ankle_roll_link', [1, 0, 0]),
'waist_yaw_joint': ('pelvis', 'waist_yaw_link', [0, 0, 1]),
'waist_roll_joint': ('waist_yaw_link', 'waist_roll_link', [1, 0, 0]),
'waist_pitch_joint': ('waist_roll_link', 'torso_link', [0, 1, 0]),
'left_shoulder_pitch_joint': ('torso_link', 'left_shoulder_pitch_link', [0, 1, 0]),
'left_shoulder_roll_joint': ('left_shoulder_pitch_link', 'left_shoulder_roll_link', [1, 0, 0]),
'left_shoulder_yaw_joint': ('left_shoulder_roll_link', 'left_shoulder_yaw_link', [0, 0, 1]),
'left_elbow_joint': ('left_shoulder_yaw_link', 'left_elbow_link', [0, 1, 0]),
'left_wrist_roll_joint': ('left_elbow_link', 'left_wrist_roll_link', [1, 0, 0]),
'left_wrist_pitch_joint': ('left_wrist_roll_link', 'left_wrist_pitch_link', [0, 1, 0]),
'left_wrist_yaw_joint': ('left_wrist_pitch_link', 'left_wrist_yaw_link', [0, 0, 1]),
'right_shoulder_pitch_joint': ('torso_link', 'right_shoulder_pitch_link', [0, 1, 0]),
'right_shoulder_roll_joint': ('right_shoulder_pitch_link', 'right_shoulder_roll_link', [1, 0, 0]),
'right_shoulder_yaw_joint': ('right_shoulder_roll_link', 'right_shoulder_yaw_link', [0, 0, 1]),
'right_elbow_joint': ('right_shoulder_yaw_link', 'right_elbow_link', [0, 1, 0]),
'right_wrist_roll_joint': ('right_elbow_link', 'right_wrist_roll_link', [1, 0, 0]),
'right_wrist_pitch_joint': ('right_wrist_roll_link', 'right_wrist_pitch_link', [0, 1, 0]),
'right_wrist_yaw_joint': ('right_wrist_pitch_link', 'right_wrist_yaw_link', [0, 0, 1]),
}
self.last_msg = None
self.lock = threading.Lock()
self.initial_pelvis_z = None # 初始pelvis高度
def link_states_callback(self, msg):
with self.lock:
self.last_msg = msg
self.publish_joint_states(msg)
self.publish_dynamic_tf(msg)
def get_link_index(self, link_name, msg):
"""获取链接在LinkStates中的索引"""
full_name = f'g1_robot::{link_name}'
try:
return msg.name.index(full_name)
except ValueError:
return -1
def get_relative_rotation(self, parent_pose, child_pose):
"""计算从parent到child的相对旋转(四元数)"""
# parent和child都是Pose消息,包含position和orientation
# 计算相对四元数:q_rel = q_parent^-1 * q_child
p_quat = [parent_pose.orientation.x, parent_pose.orientation.y,
parent_pose.orientation.z, parent_pose.orientation.w]
c_quat = [child_pose.orientation.x, child_pose.orientation.y,
child_pose.orientation.z, child_pose.orientation.w]
p_rot = Rotation.from_quat(p_quat)
c_rot = Rotation.from_quat(c_quat)
# 相对旋转
rel_rot = p_rot.inv() * c_rot
return rel_rot
def rotation_to_angle_around_axis(self, rotation, axis):
"""从旋转矩阵中提取绕指定轴的旋转角度"""
# 使用Rodrigues公式的逆
angle = rotation.magnitude()
if abs(angle) < 1e-6:
return 0.0
# 获取旋转轴
rotvec = rotation.as_rotvec()
rot_axis = rotvec / angle if angle > 1e-6 else [0, 0, 1]
# 检查旋转轴是否与指定轴一致
axis_norm = np.array(axis) / np.linalg.norm(axis)
if np.dot(rot_axis, axis_norm) > 0.9:
return angle
elif np.dot(rot_axis, axis_norm) < -0.9:
return -angle
else:
# 使用欧拉角方法
euler = rotation.as_euler('xyz')
if axis == [1, 0, 0]:
return euler[0]
elif axis == [0, 1, 0]:
return euler[1]
elif axis == [0, 0, 1]:
return euler[2]
else:
return 0.0
def publish_joint_states(self, msg):
"""发布joint_states消息"""
joint_state = JointState()
joint_state.header.stamp = rospy.Time.now()
joint_state.name = list(self.joints_info.keys())
joint_state.position = []
joint_state.velocity = [0.0] * len(joint_state.name)
joint_state.effort = [0.0] * len(joint_state.name)
# 计算每个关节的角度
for joint_name, (parent_name, child_name, axis) in self.joints_info.items():
parent_idx = self.get_link_index(parent_name, msg)
child_idx = self.get_link_index(child_name, msg)
if parent_idx < 0 or child_idx < 0:
joint_state.position.append(0.0)
continue
# 获取相对旋转
rel_rot = self.get_relative_rotation(msg.pose[parent_idx], msg.pose[child_idx])
# 提取绕指定轴的角度
angle = self.rotation_to_angle_around_axis(rel_rot, axis)
joint_state.position.append(angle)
# 发布
self.joint_states_pub.publish(joint_state)
def publish_dynamic_tf(self, msg):
"""发布动态TF:map → base_link(base_link和pelvis重合,跟随Gazebo中pelvis的实际位置和旋转)"""
pelvis_idx = self.get_link_index('pelvis', msg)
if pelvis_idx < 0:
return
pelvis_pose = msg.pose[pelvis_idx]
# map → base_link:base_link和pelvis重合,位置和旋转都来自Gazebo中的pelvis
self.tf_broadcaster.sendTransform(
translation=(pelvis_pose.position.x, pelvis_pose.position.y, pelvis_pose.position.z),
rotation=(pelvis_pose.orientation.x, pelvis_pose.orientation.y,
pelvis_pose.orientation.z, pelvis_pose.orientation.w),
time=rospy.Time.now(),
child='base_link',
parent='map'
)
if __name__ == '__main__':
try:
node = LinkStatesToJointState()
rospy.spin()
except rospy.ROSInterruptException:
pass运行步骤
cd ~/g1_test_ws
catkin_make
source ./devel/setup.bash
roslaunch g1_description display_and_gazebo.launch