文章目录
-
- 一、模板匹配概述
- 二、核心函数解析
-
- [1. matchTemplate函数](#1. matchTemplate函数)
- [2. 匹配方法详解](#2. 匹配方法详解)
- 三、完整代码实现与分析
- 四、关键步骤解析
-
- [1. 图像读取与显示](#1. 图像读取与显示)
- [2. 模板尺寸获取](#2. 模板尺寸获取)
- [3. 匹配结果分析](#3. 匹配结果分析)
- [4. 结果可视化](#4. 结果可视化)
一、模板匹配概述
模板匹配是一种在图像中寻找与给定模板图像相似区域的技术。OpenCV 提供了cv2.matchTemplate()函数来实现这一功能,它通过滑动模板图像到待搜索图像上,计算每个位置的相似度,从而找到最佳匹配位置。


二、核心函数解析
1. matchTemplate函数
python
cv2.matchTemplate(image, temp1, method, result=None, mask=None)参数说明:
- image:待搜索图像(大图)
- temp1:模板图像(小图)
- method:匹配方法,决定了如何计算相似度
- result:可选参数,存储匹配结果的矩阵
- mask:可选参数,指定模板的掩码区域
2. 匹配方法详解
OpenCV提供了六种匹配方法,每种方法都有其特点和适用场景:
python
# TM_SQUIFF 平方差匹配法,该方法采用平方差来进行匹配;匹配越好,值越小;匹配越差,值越大。
# TM_CCORR 相关匹配法,该方法采用乘法操作;数值越大表明匹配程度越好。
# TM_CCOEFF 相关系数匹配法,数值越大表明匹配程度越好。
# TM_SQUIFF_NORMED 归一化平方差匹配法,匹配越好,值越小;匹配越差,值越大。
# TM_CCORR_NORMED 归一化相关匹配法,数值越大表明匹配程度越好。
# TM_CCOEFF_NORMED 归一化相关系数匹配法,数值越大表明匹配程度越好。方法分类:
-
平方差匹配法(TM_SQDIFF):
- 基于像素值差的平方和
- 完全匹配时值为0
- 值越小匹配越好
-
相关匹配法(TM_CCORR):
- 基于模板和图像间的乘法操作
- 数值越大表示匹配越好
- 对亮度变化敏感
-
相关系数匹配法(TM_CCOEFF):
- 基于模板和图像间的相关系数
- 考虑均值和标准差
- 对亮度变化不敏感
-
归一化版本(_NORMED后缀):
- 将结果归一化到0,1或-1,1范围
- 对图像尺寸和亮度变化更鲁棒
- 推荐在实际应用中使用
三、完整代码实现与分析
python
import cv2
# 1. 读取图像
kele = cv2.imread('kele.png')
template = cv2.imread('template.png')
# 显示原始图像
cv2.imshow('kele', kele)
cv2.imshow('template', template)
cv2.waitKey(0)
# 2. 获取模板尺寸
h, w = template.shape[:2]
# 3. 执行模板匹配
# 使用归一化相关系数匹配法
# 返回一个矩阵,每个元素表示该位置与模板的匹配程度
res = cv2.matchTemplate(kele, template, cv2.TM_CCOEFF_NORMED)
# 4. 分析匹配结果
# minMaxLoc获取矩阵中的极值信息
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
# 对于TM_CCOEFF_NORMED方法,最大值位置是最佳匹配
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
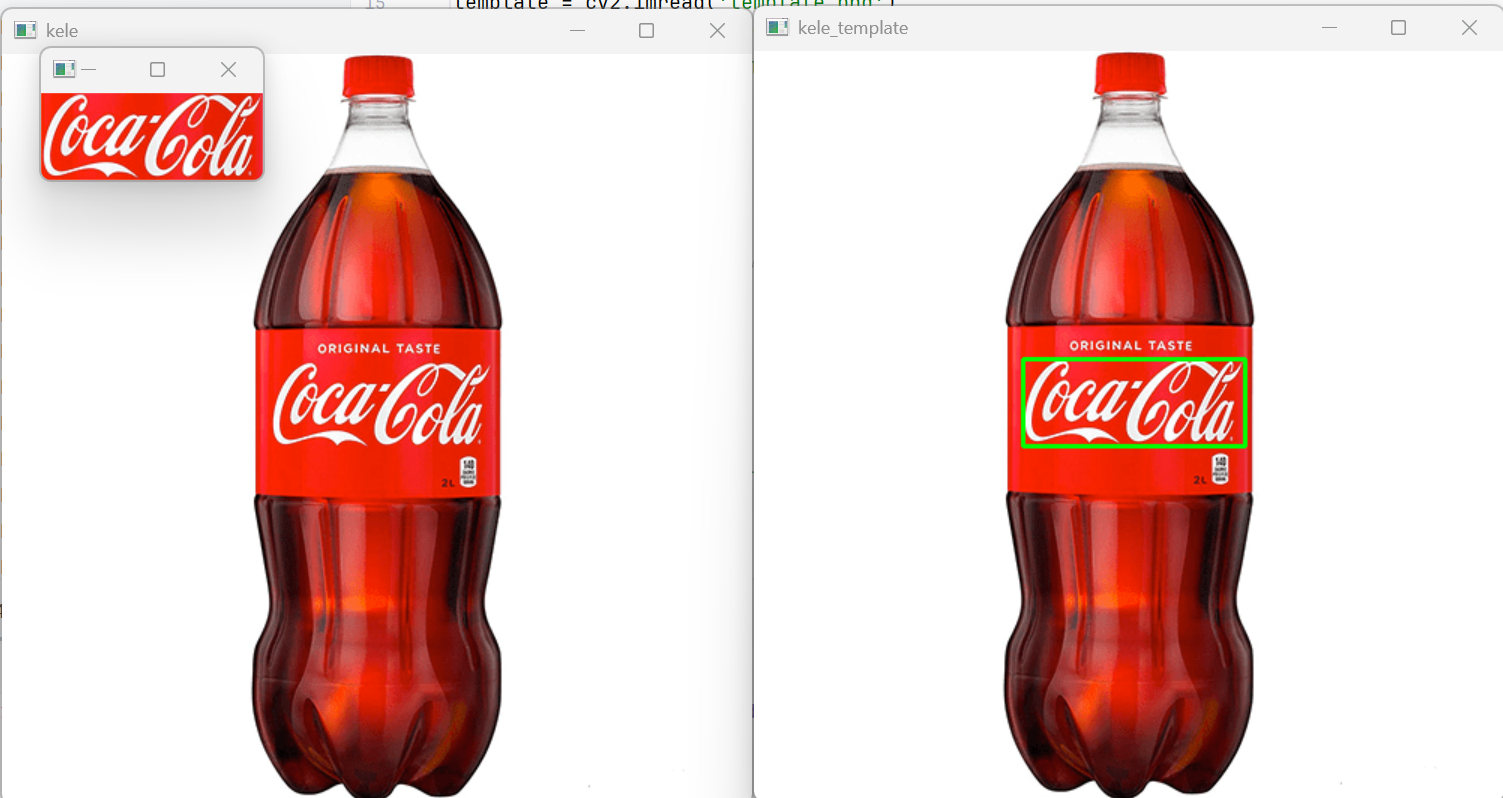
# 5. 绘制匹配区域
kele_template = cv2.rectangle(kele, top_left, bottom_right, (0, 255, 0), 2)
# 显示结果
cv2.imshow('kele_template', kele_template)
cv2.waitKey(0)四、关键步骤解析
1. 图像读取与显示
cv2.imread()读取图像文件cv2.imshow()显示图像窗口cv2.waitKey(0)等待按键继续执行
2. 模板尺寸获取
template.shape[:2]获取模板的高度和宽度- 用于后续计算匹配区域的范围
3. 匹配结果分析
cv2.minMaxLoc()是核心函数,返回:min_val:最小匹配值max_val:最大匹配值min_loc:最小值位置坐标max_loc:最大值位置坐标
注意:不同匹配方法的最优值位置不同:
- 对于平方差方法(TM_SQDIFF),最小值位置是最佳匹配
- 对于相关系数方法(TM_CCOEFF),最大值位置是最佳匹配
4. 结果可视化
cv2.rectangle()在图像上绘制矩形框- 参数说明:
- 第一个参数:目标图像
- 第二个参数:矩形左上角坐标
- 第三个参数:矩形右下角坐标
- 第四个参数:颜色(B,G,R格式)
- 第五个参数:线宽