目录
1.摘要
针对无人机在复杂应用场景中对节能、安全、平滑飞行路径的需求,本文提出了一种新的路径规划方法。研究将多障碍环境下的路径规划建模为连续约束优化问题:目标函数综合考虑路径长度、飞行高度变化与平滑性,约束包括避障、高度限制及无人机机动性。为求解该问题,本文提出自适应模糊惩罚状态转移算法(AFSTA),通过引入融合专家知识的自适应模糊惩罚函数,将适应度与约束违背程度映射为惩罚因子,并以状态转移算法同时执行全局与局部搜索。
2.多约束无人机航迹规划
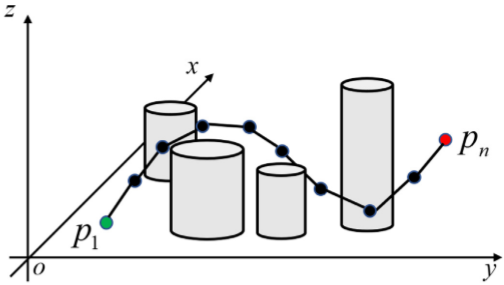
本文将无人机预规划路径表示为由 n n n个三维航点组成的连续轨迹,并将多障碍环境下的路径规划建模为一个连续多约束优化问题:以路径长度、高度变化与转弯平滑性三项加权构成总代价函数,以表征能耗与飞行可行性;同时引入无人机机动性能约束(偏航角与俯仰角范围)、飞行高度限制以及基于圆柱障碍与安全缓冲区的避障约束,要求航迹段与所有障碍保持安全距离且不发生碰撞,最终在满足全部约束条件下求解总代价最小的最优飞行路径。
3.自适应模糊惩罚状态转移算法
自适应模糊惩罚状态转移算法(AFSTA)搜索引擎采用状态转移算法(STA),其将解视为系统状态,通过状态转移方程生成新解:
x j + 1 = A j x j + B j u j x_{j+1}=A_jx_j+B_ju_j xj+1=Ajxj+Bjuj
其中 x j x_j xj与 x j + 1 x_{j+1} xj+1分别表示当前解与下一解, u j u_j uj为历史状态相关函数, A j , B j A_j,B_j Aj,Bj为状态转移
矩阵。STA 通过旋转、扩展、坐标轴变换和平移四类算子产生候选解;旋转算子更新:
x j + 1 = x j + α R r 1 N ∥ x j ∥ 2 x j x_{j+1}=x_j+\alpha R_r\frac{1}{N\|x_j\|_2}x_j xj+1=xj+αRrN∥xj∥21xj
其中 α \alpha α为旋转因子, R r ∈ R N × N R_r\in\mathbb{R}^N\times N Rr∈RN×N为元素服从-1,1均匀分布的随机矩阵, ∥ ⋅ ∥ 2 \|\cdot\|_2 ∥⋅∥2为欧
氏范数, N N N为解向量维度;该算子通过调节 α \alpha α在超球邻域内实现局部搜索。
传统静态/动态罚函数因罚因子固定或仅随迭代次数变化,难以应对多约束复杂问题,而自适应罚函数可根据候选解信息动态调整,更具鲁棒性。为此,本文提出一种自适应模糊罚函数,先将原约束问题转化为扩展目标函数:
F ( x ) = f ( x ) + r f ⋅ G ( x ) F(x)=f(x)+r_f\cdot G(x) F(x)=f(x)+rf⋅G(x)
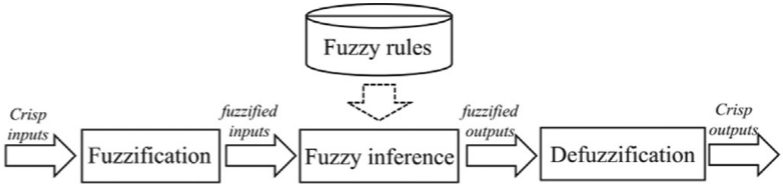
算法分为搜索引擎+约束处理两部分,并提出一种自适应模糊罚函数作为约束处理机制。罚因子调节采用两层结构:外层根据迭代进度设置最大罚值 p m a x p_{max} pmax,并在违约过大时将 p m a x p_{max} pmax提升至接近 1 以强化约束;内层利用 Mamdani 模糊逻辑系统,把专家经验转化为模糊规则,最终为每个候选解自适应输出 p f p_f pf,从而在保证可行性的同时提升搜索效率与解质量。
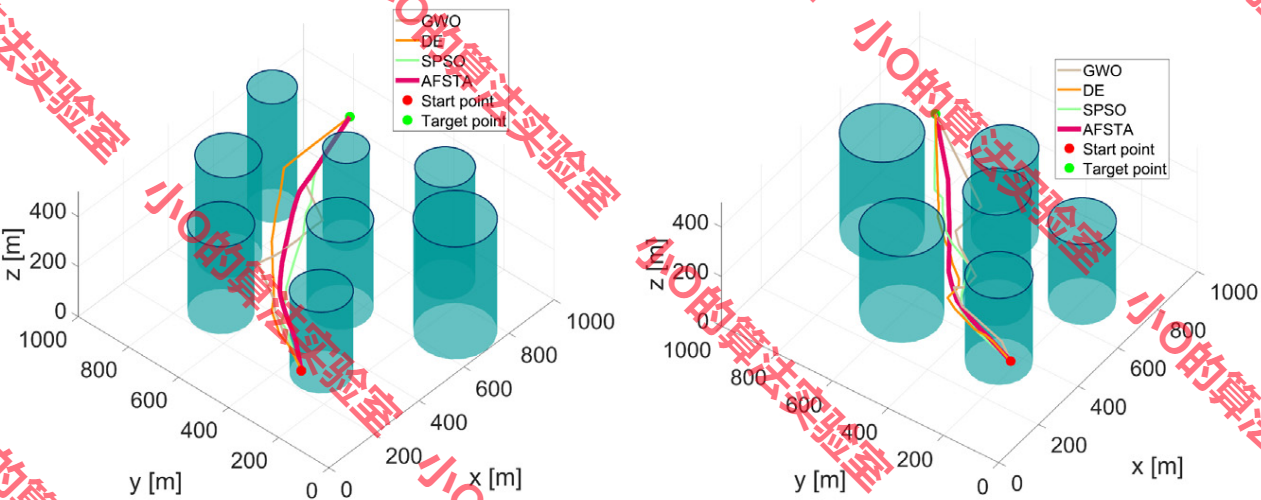
4.结果展示
5.参考文献
1 Zhou X, Tang Z, Wang N, et al. A novel state transition algorithm with adaptive fuzzy penalty for multi-constraint UAV path planningJ. Expert systems with applications, 2024, 248: 123481.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx