摘要 :
在 IPC(工控机)上部署 EtherCAT 主站时,Windows 操作系统的非实时特性往往是工程落地中的最大不确定性来源。后台任务调度、中断延迟以及电源管理机制都可能导致通讯周期出现微秒级的抖动(Jitter)。本文将探讨 Windows 环境下实时性保障的底层逻辑,并重点介绍基于 acontis 的 Type-1 Hypervisor 虚拟化架构如何在保证 Windows 生态兼容性的同时,实现硬实时的控制性能。
一、 核心痛点:通用操作系统的调度不确定性
在工业自动化场景中,控制系统对确定性的要求远高于吞吐量。然而,Windows 的调度器设计初衷是基于"公平性"与"响应速度",而非"确定性"。
在实际部署中,通常面临以下挑战:
-
中断延迟:BIOS 层面的 SMI(系统管理中断)或驱动程序的 DPC(延迟过程调用)可能抢占 CPU 资源,导致高优先级的控制任务被阻塞。
-
系统干扰:Windows 更新、杀毒软件扫描或 USB 设备的热插拔,都可能引发不可预测的系统卡顿,进而导致 EtherCAT 丢帧或同步丢失。
-
可靠性风险:若控制逻辑直接运行在 Windows 内核或用户层,一旦操作系统蓝屏(BSOD),整个控制系统将随之瘫痪,造成停机事故。
二、 基础优化:硬件层面的确定性保障
无论采用何种软件架构,BIOS 的配置是实时系统的基石。为了消除硬件层面的延迟,通常需要执行以下标准化操作:
-
锁定 CPU 频率:关闭 Intel SpeedStep 或 C-States 等节能技术,防止 CPU 在频率切换时产生延迟。
-
消除逻辑核干扰:关闭超线程(Hyper-Threading),确保实时任务独占物理运算单元。
-
屏蔽干扰源:禁用 Legacy USB Support 等可能触发 SMI 中断的功能。
三、 架构演进:从核隔离到虚拟化
为了彻底解决 Windows 的调度干扰,工程界普遍采用**"资源隔离"**策略。
1. 传统方案:核隔离(Core Isolation)
该方案通过修改系统引导参数,将多核 CPU 中的特定核心从 Windows 调度中剥离,专门用于运行实时任务。虽然能在一定程度上提升稳定性,但这种方式往往需要复杂的驱动开发,且难以完全规避 Windows 内核崩溃的影响。
2. 进阶方案:Type-1 Hypervisor 虚拟化(以 acontis 为例)
目前更为先进的解决方案是采用 Type-1 Hypervisor 技术,例如 acontis 提供的 LxWin 架构。
该架构直接在裸机硬件上运行 Hypervisor,将硬件资源逻辑分割为两个独立域:
-
通用域(Windows):运行 HMI 界面、数据库及云端连接应用。
-
实时域(RTOS):运行 EtherCAT 主站(EC-Master)及控制算法。
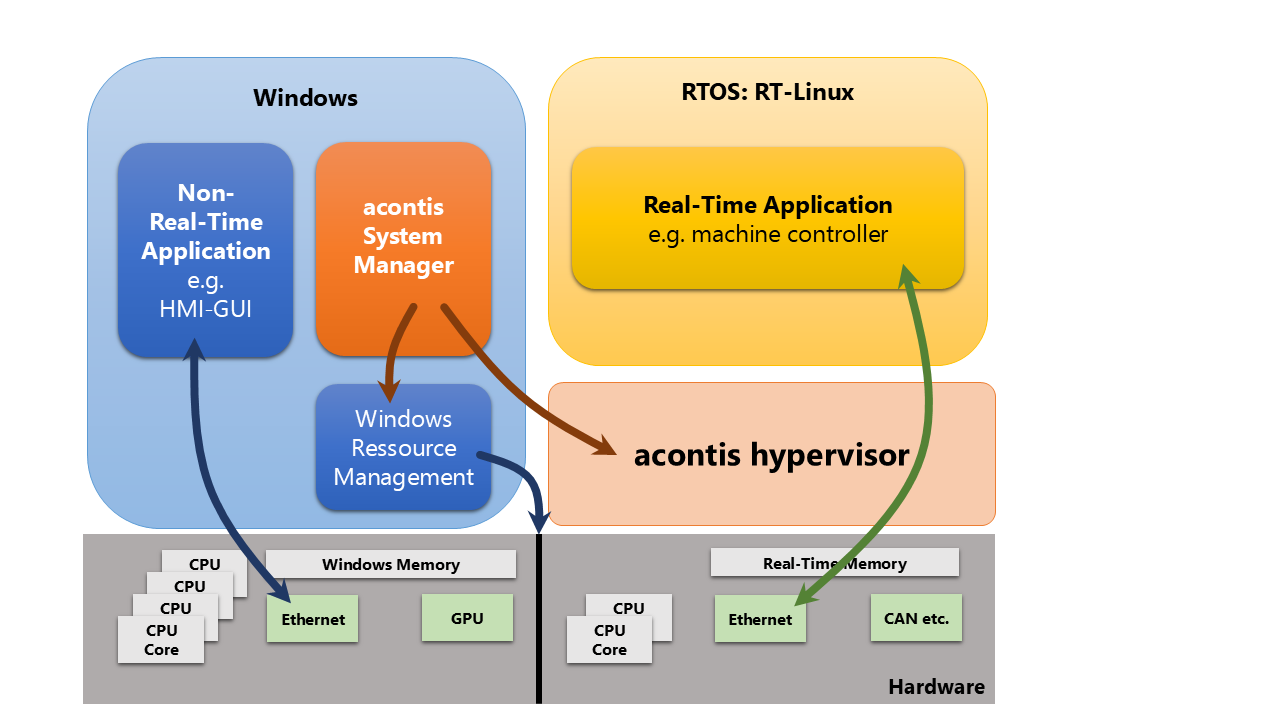
这种虚拟化架构具备显著的工程优势:
-
硬实时隔离:实时域拥有独立的中断控制器和内存空间,即使 Windows 发生崩溃或重启,实时控制任务依然能稳定运行,不受任何影响。
-
生态解耦:开发者可以利用 Linux 丰富的开源生态编写控制算法,同时保留 Windows 强大的交互能力,两者通过共享内存高速通信。
-
全数字仿真 (EC-Simulator):配合 acontis 的仿真技术,开发团队可在无物理硬件(伺服、IO模块)的情况下,在 Windows 上通过虚拟化环境直接运行完整的 EtherCAT 网络仿真。这不仅大幅降低了对硬件的依赖,还支持故障注入测试,显著缩短了现场调试周期。
四、 总结
在 Windows 平台上实现 EtherCAT 实时控制,本质上是一场与"不确定性"的博弈。相比于传统的系统裁剪与驱动魔改,基于 acontis 的虚拟化分层架构提供了一种更为现代、稳健的解题思路。通过将非实时任务与硬实时任务物理隔离,该方案成功兼顾了 Windows 的易用性与工业控制的严苛稳定性要求。