序
本文是国科大《模式识别与机器学习》课程的简要复习,基于课件然后让ai帮忙补充了一些解释。本文是第五到第八章。本文章更多是对于课件的知识点的记录总结,找了点例题和讲解,建议结合其他资料或者课件来看。
第五章 统计机器学习基础
5.1 统计学习根源
什么是机器学习?
机器学习是计算机科学子领域,从模式识别和计算学习理论演化而来。它研究构建能从数据学习并预测的算法,通过示例输入构建模型,进行数据驱动预测,而非静态指令。Arthur Samuel (1959) 定义为"让计算机无需显式编程即可学习"。Tom M. Mitchell定义为:程序从经验E中学习任务T,性能P改善(PAC理论)。
学习任务例子 :改善任务T的性能P基于经验E。
例如:
T: 垃圾邮件分类,P: 正确分类百分比,E: 标注邮件集合。
T: 手写字识别,P: 正确识别百分比,E: 标注手写字。
T: 下跳棋,P: 赢得概率,E: 多盘游戏经验。
机器学习特点 :
数据大量廉价、知识稀少;数据过程未知但非随机;通过模式学习模型,反推生成路径;模型是近似(George Box: "All models are wrong, but some are useful");模型描述知识或预测;科学本质是模型拟合数据。
机器学习方法分类 :
有监督学习:有标记数据,e.g., Fisher、感知器、线性判别分析。
无监督学习:无标注数据,e.g., 降维KL变换。
半监督学习:有/无标注混合。
多任务学习:共享相关任务表征。
迁移学习:训练/测试不同分布。
强化学习:间接标注(状态+reward)。
主动学习:主动选择训练数据。
自监督学习:从无标注数据提取监督信号。
5.2 经验风险与期望风险
统计机器学习的目标是:
给定独立同分布(i.i.d.)的训练样本集
{(x1,y1),(x2,y2),...,(xN,yN)}∼p(x,y)\{(\mathbf{x}^1, y^1), (\mathbf{x}^2, y^2), \dots, (\mathbf{x}^N, y^N)\} \sim p(\mathbf{x}, y){(x1,y1),(x2,y2),...,(xN,yN)}∼p(x,y)
我们希望从一个假设空间(函数类)F\mathcal{F}F中找到一个函数f:x↦yf: \mathbf{x} \mapsto yf:x↦y,使得它在所有可能的数据(包括未来未见数据)上表现最好。
这里的关键是:我们永远不知道真实的数据联合分布p(x,y)p(\mathbf{x}, y)p(x,y),只能通过有限样本去估计。
期望风险(Expected Risk)------理论上的最优目标
定义:
对一个预测函数fff,它的期望风险(也叫真实风险、真风险)定义为
R(f)=E(x,y)∼p(x,y)L(f(x),y)=∫L(f(x),y) p(x,y) dxdyR(f) = \mathbb{E}_{(x,y)\sim p(x,y)} L(f(\\mathbf{x}), y) = \int L(f(\mathbf{x}), y) \, p(\mathbf{x}, y) \, d\mathbf{x} dyR(f)=E(x,y)∼p(x,y)L(f(x),y)=∫L(f(x),y)p(x,y)dxdy
其中:
L(⋅,⋅)L(\cdot, \cdot)L(⋅,⋅) 是损失函数(loss function),衡量预测值f(x)f(\mathbf{x})f(x)和真实标签yyy的差距。
期望是对未知的真实分布p(x,y)p(\mathbf{x}, y)p(x,y)取的。
直观理解:
期望风险就是"在整个宇宙所有可能出现的数据上,平均犯错多少"。这是我们真正关心的指标------泛化能力。
但问题在于:p(x,y)p(\mathbf{x}, y)p(x,y)未知,所以R(f)R(f)R(f)无法直接计算。我们只能用训练数据去"估计"它。
经验风险(Empirical Risk)------我们能直接计算的东西
定义:
用训练样本上的平均损失来估计期望风险,称为经验风险(也叫训练误差、经验误差):
R^(f)=1N∑i=1NL(f(xi),yi)\hat{R}(f) = \frac{1}{N} \sum_{i=1}^N L(f(\mathbf{x}^i), y^i)R^(f)=N1∑i=1NL(f(xi),yi)
直观理解:
经验风险就是"在已有的N个训练样本上,平均犯错多少"。这是我们能直接算出来的。
经验风险最小化(ERM)原则------最直观的策略
最朴素的想法是:既然R(f)R(f)R(f)算不了,就找一个fff让R^(f)\hat{R}(f)R^(f)最小,这个原则叫经验风险最小化(Empirical Risk Minimization, ERM)。
很多经典算法都是ERM的体现:
最小二乘线性回归 → 最小化训练样本上的平方损失
感知器、SVM(硬间隔) → 最小化训练样本上的误分类数或hinge损失
逻辑回归 → 最小化训练样本上的交叉熵
问题来了:
当模型复杂度很高(假设空间F\mathcal{F}F很大)时,很容易找到一个fff让R^(f)=0\hat{R}(f) = 0R^(f)=0(训练误差为0),但在未知数据上表现很差------这就是过拟合。
回归问题下的最优函数推导
假设回归任务,损失函数为平方损失:
L(f(x),y)=(f(x)−y)2L(f(\mathbf{x}), y) = (f(\mathbf{x}) - y)^2L(f(x),y)=(f(x)−y)2
期望风险:
R(f)=E(f(x)−y)2R(f) = \mathbb{E}(f(\\mathbf{x}) - y)\^2R(f)=E(f(x)−y)2
我们把期望拆开(对固定x\mathbf{x}x条件期望):
R(f)=ExEy\[(f(x)−y)2∣x]R(f) = \mathbb{E}_\mathbf{x} \left \\mathbb{E}_y \\left\[ (f(\\mathbf{x}) - y)\^2 \\mid \\mathbf{x} \\right \right]R(f)=ExEy\[(f(x)−y)2∣x]
对内层期望展开:
Ey(f(x)−y)2∣x=Ey(f(x)−E\[y∣x+Ey∣x−y)2∣x]\mathbb{E}_y (f(\\mathbf{x}) - y)\^2 \\mid \\mathbf{x} = \mathbb{E}_y (f(\\mathbf{x}) - \\mathbb{E}\[y\|\\mathbf{x} + \mathbb{E}y\|\\mathbf{x} - y)^2 \mid \mathbf{x}]Ey(f(x)−y)2∣x=Ey(f(x)−E\[y∣x+Ey∣x−y)2∣x]
=(f(x)−Ey∣x)2+Ey(y−E\[y∣x)2∣x]= (f(\mathbf{x}) - \mathbb{E}y\|\\mathbf{x})^2 + \mathbb{E}_y (y - \\mathbb{E}\[y\|\\mathbf{x})^2 \mid \mathbf{x}]=(f(x)−Ey∣x)2+Ey(y−E\[y∣x)2∣x]
=(f(x)−Ey∣x)2+Var(y∣x)= (f(\mathbf{x}) - \mathbb{E}y\|\\mathbf{x})^2 + \mathrm{Var}(y|\mathbf{x})=(f(x)−Ey∣x)2+Var(y∣x)
其中第二项是噪声方差(不可约误差),与fff无关。
因此,
R(f)=Ex(f(x)−E\[y∣x)2]+ExVar(y∣x)R(f) = \mathbb{E}\mathbf{x} (f(\\mathbf{x}) - \\mathbb{E}\[y\|\\mathbf{x})^2] + \mathbb{E}\mathbf{x} \\mathrm{Var}(y\|\\mathbf{x})R(f)=Ex(f(x)−E\[y∣x)2]+ExVar(y∣x)
要最小化R(f)R(f)R(f),只需让
f∗(x)=Ey∣xf^*(\mathbf{x}) = \mathbb{E}y \\mid \\mathbf{x}f∗(x)=Ey∣x
结论:回归问题的最优预测函数就是yyy在给定x\mathbf{x}x下的条件均值。
分类问题下的最优函数推导
假设分类任务,使用0-1损失:
L(f(x),y)=I{f(x)≠y}L(f(\mathbf{x}), y) = \mathbb{I}\{f(\mathbf{x}) \neq y\}L(f(x),y)=I{f(x)=y}
期望风险:
R(f)=EI{f(x)≠y}=P(f(x)≠y)R(f) = \mathbb{E}\\mathbb{I}\\{f(\\mathbf{x}) \\neq y\\} = P(f(\mathbf{x}) \neq y)R(f)=EI{f(x)=y}=P(f(x)=y)
对固定x\mathbf{x}x,误分类概率为:
P(f(x)≠y∣x)=∑kP(y=k∣x)⋅I{f(x)≠k}P(f(\mathbf{x}) \neq y \mid \mathbf{x}) = \sum_{k} P(y=k \mid \mathbf{x}) \cdot \mathbb{I}\{f(\mathbf{x}) \neq k\}P(f(x)=y∣x)=k∑P(y=k∣x)⋅I{f(x)=k}
要最小化误分类概率,只需选择后验概率最大的类别:
f∗(x)=argmaxkP(y=k∣x)f^*(\mathbf{x}) = \arg\max_k P(y=k \mid \mathbf{x})f∗(x)=argkmaxP(y=k∣x)
这就是著名的Bayes最优分类器。
对于二分类,若P(y=1∣x)>0.5P(y=1 \mid \mathbf{x}) > 0.5P(y=1∣x)>0.5则判为1,否则判为0(等价于比较P(y=1∣x)P(y=1 \mid \mathbf{x})P(y=1∣x)和P(y=0∣x)P(y=0 \mid \mathbf{x})P(y=0∣x))。
注意:Bayes分类器是理论上错误率最低的分类器,但实际中后验概率P(y∣x)P(y \mid \mathbf{x})P(y∣x)未知,需要用数据估计。
总结一下:
当N→∞N \to \inftyN→∞时,根据大数定理,R^(f)→R(f)\hat{R}(f) \to R(f)R^(f)→R(f)(对固定的fff)。
但实际NNN有限,且我们要在F\mathcal{F}F中选fff让R^(f)\hat{R}(f)R^(f)最小,这时R^(f)\hat{R}(f)R^(f)可能严重低估R(f)R(f)R(f)(过拟合)。
回归最优:条件均值 f(x)=Ey∣xf(\mathbf{x}) = \mathbb{E}y \\mid \\mathbf{x}f(x)=Ey∣x
分类最优:后验概率最大类 f(x)=argmaxP(y∣x)f(\mathbf{x}) = \arg\max P(y \mid \mathbf{x})f(x)=argmaxP(y∣x)
5.3 测试误差估计
我们怎么知道学到的模型在未来未知数据上会表现怎么样?
训练误差(经验风险)很容易算,但它往往会"骗人"(过拟合时训练误差很小,但真实表现差)。所以我们需要用独立于训练过程的数据来估计模型的泛化误差(即期望风险的近似),这就是"测试误差估计"的意义。
为什么需要测试误差估计?
训练误差R^(f)=1Ntrain∑L(f(xi),yi)\hat{R}(f) = \frac{1}{N_{\text{train}}} \sum L(f(\mathbf{x}_i), y_i)R^(f)=Ntrain1∑L(f(xi),yi) 总是乐观的,尤其模型复杂时容易降到0。
我们真正关心的是期望风险R(f)R(f)R(f),但它算不了。
解决办法:拿出一部分没参与训练的数据(测试集),在上面计算平均损失,作为R(f)R(f)R(f)的无偏估计。这就是测试误差:
etest=1Ntest∑i∈testL(f(xi),yi)e_{\text{test}} = \frac{1}{N_{\text{test}}} \sum_{i \in \text{test}} L(f(\mathbf{x}_i), y_i)etest=Ntest1i∈test∑L(f(xi),yi)
5.4 正则化方法 (Regularization)
核心思想:惩罚"任性"的模型
在统计学习中,如果模型为了追求训练误差(经验风险)为 ,会变得极其复杂(比如权重 变得巨大,或者曲线变得极其扭曲),这就会导致过拟合。
正则化 的本质就是:在损失函数后面加一个"紧箍咒"(惩罚项),告诉模型:"你可以拟合数据,但你的参数不能太离谱。"
ERM vs SRM
| 维度 | ERM (经验风险最小化) | SRM (结构风险最小化) |
|---|---|---|
| 目标函数 | minR^(f)\min \hat{R}(f)minR^(f) | minR^(f)+λJ(f)\min \hat{R}(f) + \lambda J(f)minR^(f)+λJ(f) |
| 核心逻辑 | 只要训练集表现好就行。 | 训练集要好,模型还要简单。 |
| 打分机制 | 只看准确率。 | 准确率 - 复杂度惩罚。 |
| 潜在风险 | 过拟合(死记硬背噪声)。 | 欠拟合(如果 过大)。 |
上表中R^(f)\hat{R}(f)R^(f)是经验风险 (Empirical Risk),J(f)J(f)J(f)是正则化项 / 惩罚项 (Regularization Term)。
常见的形式:
L2 范数:J(f)=∥w∥2J(f) = \|w\|^2J(f)=∥w∥2。它希望参数 www 都尽量小,分布均匀,不要出现某些特别巨大的权重。
L1 范数:J(f)=∥w∥1J(f) = \|w\|_1J(f)=∥w∥1。它希望参数尽量稀疏,不重要的特征权重直接减为 0。
【直观理解】
- ERM 像是一个拼命刷题的考生,背下了卷子上所有的干扰项(噪声),遇到新题就傻眼了。
- SRM 像是一个寻找规律的考生,他宁愿放弃几个奇怪的特例(牺牲一点训练精度),也要总结出简单的通用公式。
- λ\lambdaλ(超参数):它是你的"容忍度"。 越大,你对模型复杂度的容忍度越低,模型越倾向于平滑、简单。
三大主流正则化工具
(1) L2 正则:岭回归 (Ridge) ------ "集体瘦身"
- 数学形式 :J(f)=∥w∥22=∑wj2J(f) = \| \mathbf{w} \|^2_2 = \sum w_j^2J(f)=∥w∥22=∑wj2
- 效果:惩罚权重的平方。它让每个 都变小,趋近于 ,但很难真正等于 。
- 【直观理解】:它像是一股向心力,把原本张牙舞爪的权重向量 整体拉向原点。由于平方项的存在,权重越大惩罚越重,所以它最讨厌"一枝独秀"的大权重,更喜欢"平庸"的小权重集合。
- 贝叶斯解释 :假设参数 服从高斯分布。
(2) L1 正则:Lasso ------ "优胜劣汰"
- 数学形式 :J(f)=∥w∥1=∑∣wj∣J(f) = \| \mathbf{w} \|_1 = \sum |w_j|J(f)=∥w∥1=∑∣wj∣
- 效果 :惩罚权重的绝对值。它会产生稀疏解,即把很多不重要的特征权重直接压成 。
- 【直观理解】:L1 正则非常"狠",它不仅让权重变小,还会直接"劝退"那些贡献不大的特征。
- 几何解释:L1 的等值线是"带尖角的菱形",而损失函数的等值线更有可能在尖角处(坐标轴上)与之相碰,此时某个坐标轴的值即为 。
- 贝叶斯解释 :假设参数 服从拉普拉斯分布。
(3) 弹性网络 (Elastic Net) ------ "中庸之道"
- 数学形式 :λρ∥w∥1+(1−ρ)∥w∥22\lambda \\rho \\\| \\mathbf{w} \\\|_1 + (1-\\rho) \\\| \\mathbf{w} \\\|_2\^2 λρ∥w∥1+(1−ρ)∥w∥22
- 效果:结合了 L1 的自动特征选择和 L2 的稳定性。
- 适用场景 :当你有多个高度相关的特征时,Lasso 可能会随机选一个,而 Elastic Net 会倾向于把它们一起保留或剔除。
偏差-方差权衡 (Bias-Variance Tradeoff)
正则化本质上是在做一场交易:用增加偏差(Bias)的代价,来大幅降低方差(Variance)。
- 无正则化 () :模型完全拟合数据。低偏差 (训练得准),但高方差(换个数据集结果全变了)。
- 强正则化 () :模型变得极简(如变成一条水平线)。高偏差 (训练得不准),但低方差(非常稳定,换什么数据都长这样)。
结论 :正则化的艺术就在于通过交叉验证找到那个 ,使得总误差 = 偏差² + 方差 + 噪声 达到最小。
5.5 泛化理论与 VC 维
泛化误差界 (Generalization Error Bound)
我们真正关心的是模型在全样本空间上的期望风险 R(f)R(f)R(f),但我们只能观测到经验风险 R^(f)\hat{R}(f)R^(f)。泛化理论给出了两者的关系:
R(f)≤R^(f)+ϵ(N,H,δ)R(f) \leq \hat{R}(f) + \epsilon(N, \mathcal{H}, \delta)R(f)≤R^(f)+ϵ(N,H,δ)
ϵ\epsilonϵ(泛化误差界):即"惩罚项",它代表了模型从训练集迁移到测试集时的"信心不足程度"。
影响因素:
- 样本量 NNN:NNN 越大,ϵ\epsilonϵ 越小(见多识广,预测越准)。
- 模型容量 H\mathcal{H}H:模型空间越复杂,ϵ\epsilonϵ 越大(越容易瞎猜,风险越高)。
VC 维:衡量模型能力的尺子
如何量化"模型有多复杂"?除了参数个数,统计学习引入了 VC 维 (Vapnik-Chervonenkis Dimension)。
核心概念:打散 (Shattering)
定义 :如果一个模型空间 H\mathcal{H}H 能够实现 NNN 个点在所有可能的 2N2^N2N 种标签组合下的正确分类,就称这 NNN 个点能被该模型空间打散。
VC 维定义 :模型空间 H\mathcal{H}H 能够打散的最大样本集的大小。
【直观理解】
想象你在玩一个"连点成线"的游戏。
- D=1(线性模型在1维):给定2个点,无论标签是 (0,0), (1,1), (1,0), (0,1),你都能用一个点(阈值)把它们分开。但如果是3个点(如两头是0,中间是1),直线就没辙了。所以 D=1 的线性模型 VC 维是 2。
- D=2(平面上的直线):能打散任意 3 个点,但无法打散 4 个点(如 XOR 异或布局)。因此,平面直线的 VC 维是 3。
- 结论 :通常情况下,线性模型的 VC 维 ≈\approx≈ 参数个数 + 1。
为什么引入 VC 维?(深层逻辑)
VC 维给出了泛化误差的具体上限。对于一个 VC 维为 的模型,当样本量 足够大时,泛化误差界满足:
ϵ∝dln(N/d)+ln(1/δ)N\epsilon \propto \sqrt{\frac{d \ln(N/d) + \ln(1/\delta)}{N}}ϵ∝Ndln(N/d)+ln(1/δ)
这个公式非常有启发性,它告诉我们:
- 模型越强(ddd 越大):虽然训练误差 R^(f)\hat{R}(f)R^(f) 会下降,但右边的误差界 ϵ\epsilonϵ 会迅速膨胀。
- 数据越多(NNN 越大):误差界 ϵ\epsilonϵ 会收敛到 0,此时经验风险就等于期望风险。
总结:正则化、VC 维与结构风险最小化 (SRM)
现在我们可以把这些概念串联起来了:
- 正则化 中的 J(f)J(f)J(f),本质上就是在工程上限制模型的 VC 维。
- VC 维 是在理论上度量 J(f)J(f)J(f) 所代表的复杂度。
- SRM (结构风险最小化) 准则就是要求我们在训练时,同时考虑"训练得准不准"(经验风险)和"模型强不强"(VC 维引起的泛化风险)。
第六章 有监督学习方法
6.1 有监督学习概览
有监督学习的目标是利用带标记的训练集,学习一个能对未知样本进行预测的推断函数。
核心模型分类
-
判别式模型 (Discriminative)
-
方法 :直接对条件概率 P(y∣x)P(y|x)P(y∣x) 或判别函数 f(x)f(x)f(x) 建模。
-
直观理解:它直接学习"分类边界"。看到一个样本,它直接告诉你这个点在边界的哪一侧。
-
典型算法:线性回归、逻辑回归、SVM、神经网络。
-
生成式模型 (Generative)
-
方法 :先学习联合分布 P(x,y)P(x,y)P(x,y),再通过贝叶斯定理计算后验概率 P(y∣x)P(y|x)P(y∣x)。
-
直观理解:它学习每一类数据的"长相"。看到一个样本,它会对比这个样本更像哪一类的分布。
-
典型算法:朴素贝叶斯、高斯判别分析 (GDA)。
6.2 线性回归与最小二乘法 (LMS)
问题定义
给定 NNN 个样本 (xi,yi)(x^i, y^i)(xi,yi),目标是找到权重向量 www,使得预测值 f(x)=wTxf(x) = w^T xf(x)=wTx 与真实值 yyy 的差距最小。
损失函数(L2 损失):
J(w)=∑i=1N(wTxi−yi)2=∥Xw−y∥2J(w) = \sum_{i=1}^N (w^T x^i - y^i)^2 = \|Xw - y\|^2J(w)=i=1∑N(wTxi−yi)2=∥Xw−y∥2
求解方案
方案 A:解析解(正规方程)
通过求导并令导数为 0,直接得出最优解:
w∗=(XTX)−1XTyw^* = (X^T X)^{-1} X^T yw∗=(XTX)−1XTy
【几何视角】
在特征空间中,预测值 y^=Xw\hat{y} = Xwy^=Xw 是真实观测值 yyy 在特征矩阵 XXX 的列空间上的正交投影。正交意味着误差向量 (y−y^)(y - \hat{y})(y−y^) 与特征空间垂直,此时误差平方和达到最小值。
方案 B:梯度下降(迭代更新)
当数据量巨大(矩阵求逆太慢)时,采用迭代法:
wnew=wold−α∇J(w)w_{new} = w_{old} - \alpha \nabla J(w)wnew=wold−α∇J(w)
- 批梯度下降 (BGD) :每次更新使用全量数据。收敛平滑,但数据量大时计算极慢。
- 随机梯度下降 (SGD) :每次只用一个样本。速度快,能处理流式数据,但收敛路径是震荡的。
6.3 概率视角下的回归
为什么用平方误差?(MLE 解释)
如果我们假设观测值 yyy 是由真实线性关系加上高斯噪声 ϵ∼N(0,σ2)\epsilon \sim \mathcal{N}(0, \sigma^2)ϵ∼N(0,σ2) 构成的,那么:
最大似然估计 (MLE) 等价于 最小二乘法 (LMS)。
这说明最小二乘法背后的假设是误差呈正态分布。
为什么加正则化?(MAP 解释)
在极大似然估计的基础上,如果我们假设权重 www 本身也服从某种分布(先验):
- 高斯先验 ⟹ \implies⟹ 推导结果等价于 L2 正则化 (Ridge)。
- 拉普拉斯先验 ⟹ \implies⟹ 推导结果等价于 L1 正则化 (Lasso)。
6.4 鲁棒性与进阶优化
- 应对异常值:Huber 损失痛点:L2 损失由于有平方项,会极大放大异常值(Outlier)的误差,导致模型被带偏。解决:Huber 损失在误差较小时使用平方(L2),误差较大时切换为线性(L1),从而对异常值更具鲁棒性。
- 应对不可导点:次梯度 (Subgradient)L1 正则化在 w=0w=0w=0 处是个尖角,无法求导。方法:使用次梯度,即在尖点处任选一个位于其梯度包络范围内的值作为下降方向。
6.5 逻辑回归 (Logistic Regression)
虽然名字叫"回归",但它是不折不扣的分类模型 。它的核心逻辑是:在线性回归的基础上,套一个"壳子",把连续的预测值映射到 (0,1)(0, 1)(0,1) 区间,表示概率。
Sigmoid 函数:非线性的桥梁
g(z)=11+e−zg(z) = \frac{1}{1 + e^{-z}}g(z)=1+e−z1
作用:将实数域的输出 z=wTxz = w^T xz=wTx 压缩到 (0,1)(0, 1)(0,1)。
模型假设:hw(x)=g(wTx)=P(y=1∣x;w)h_w(x) = g(w^T x) = P(y=1 \mid x; w)hw(x)=g(wTx)=P(y=1∣x;w)。
对数几率 (Logit) 的直观理解
如果我们把公式变形:
lnP(y=1∣x)P(y=0∣x)=wTx\ln \frac{P(y=1 \mid x)}{P(y=0 \mid x)} = w^T xlnP(y=0∣x)P(y=1∣x)=wTx
左边:称为"对数几率"(Log-odds)。
物理意义:逻辑回归本质上是在用线性回归去拟合样本属于正类的相对可能性。
参数估计:极大似然估计 (MLE)
不同于线性回归用平方损失,逻辑回归使用交叉熵损失 (Cross-Entropy Loss):
似然函数:L(w)=∏hw(xi)yi1−hw(xi)1−yiL(w) = \prod h_w(x\^i)^{y^i} 1 - h_w(x\^i)^{1-y^i}L(w)=∏hw(xi)yi1−hw(xi)1−yi
对数损失:J(w)=−∑yilnhw(xi)+(1−yi)ln(1−hw(xi))J(w) = -\sum y\^i \\ln h_w(x\^i) + (1-y\^i) \\ln(1 - h_w(x\^i))J(w)=−∑yilnhw(xi)+(1−yi)ln(1−hw(xi))
优化:该函数是凸函数,使用梯度下降更新:w←w+α∑(yi−hw(xi))xiw \leftarrow w + \alpha \sum (y^i - h_w(x^i))x^iw←w+α∑(yi−hw(xi))xi。
- 注意:更新公式的形式和线性回归相似。
6.6 从二分类到多分类:Softmax 回归
当类别数 K>2K > 2K>2 时,逻辑回归进化为 Softmax 回归。
核心公式:对每一类 kkk 计算一个得分 zkz_kzk,然后归一化:P(y=k∣x)=ewkTx∑j=1KewjTxP(y=k \mid x) = \frac{e^{w_k^T x}}{\sum_{j=1}^K e^{w_j^T x}}P(y=k∣x)=∑j=1KewjTxewkTx
特点:所有类别的概率之和等于 1。
决策规则:选概率最大的那一类。
6.7 生成式分类器:高斯判别分析 (GDA)
逻辑回归是直接求 P(y∣x)P(y|x)P(y∣x)(判别式),而 GDA 走的是"先建模分布,再用贝叶斯推导"的路线(生成式)。
模型假设
先验:y∼Bernoulli(ϕ)y \sim \text{Bernoulli}(\phi)y∼Bernoulli(ϕ)
类条件概率(关键):假设每一类数据都服从高斯分布:
x∣y=0∼N(μ0,Σ)x \mid y=0 \sim \mathcal{N}(\mu_0, \Sigma)x∣y=0∼N(μ0,Σ)
x∣y=1∼N(μ1,Σ)x \mid y=1 \sim \mathcal{N}(\mu_1, \Sigma)x∣y=1∼N(μ1,Σ)
注意:通常假设各类别协方差矩阵 Σ\SigmaΣ 相同。
通过贝叶斯公式推导后可以发现,如果协方差矩阵 Σ\SigmaΣ 相同,GDA 的后验概率 P(y∣x)P(y|x)P(y∣x) 形式上也是一个 Sigmoid 函数,且决策边界是线性的。
决策边界
通过贝叶斯公式推导后可以发现,如果协方差矩阵 Σ\SigmaΣ 相同,GDA 的后验概率 P(y∣x)P(y|x)P(y∣x) 形式上也是一个 Sigmoid 函数,且决策边界是线性的。
6.8 逻辑回归 vs. GDA
- 假设强弱:
- GDA 假设很强(数据必须是高斯分布)。如果假设正确,GDA 只需要更少的数据就能学得很好(训练效率高)。
- 逻辑回归 假设很弱。它更具鲁棒性 (Robust),即使数据不是高斯分布(比如是泊松分布),它依然能工作得很好。
- 数据量:
- 数据量小时,GDA 往往表现更好(因为先验假设起了引导作用)。
- 数据量大时,逻辑回归通常更优,因为它能根据数据自适应调整。
6.9 感知机算法 (Perceptron)
感知机是最古老的分类算法之一,也是神经网络的基石。
-
模型 :y=sgn(wTx+b)y = \text{sgn}(w^T x + b)y=sgn(wTx+b)。
-
损失函数:误分类点到超平面的总距离。
-
更新准则 :只要分类错了,就进行更新:
w←w+αyixiw \leftarrow w + \alpha y^i x^iw←w+αyixi -
局限性 :只能处理线性可分的数据。如果数据不是线性可分的,感知机永远不会收敛(会一直震荡)。
6.10 非平衡数据集处理 (Imbalanced Learning)
在现实中,负样本往往远多于正样本(例如 99.9% 的交易是正常的)。此时模型如果全猜负类,准确率高达 99.9%,但毫无意义。
1. 采样方法 (Sampling)
- 欠采样 (Under-sampling):随机丢弃一些大类样本。优点是快,缺点是可能丢失重要信息。
- 过采样 (Over-sampling) :复制小类样本,或者通过 SMOTE 算法在小类样本之间"插值"生成新样本。
2. 代价敏感学习 (Cost-Sensitive Learning)
- 核心思想:既然正样本稀少且重要,我们就人为提高它分类错误的"代价"。
- 损失函数改造:给损失函数加权重。
J(w)=∑i∈positiveCposL(f,y)+∑i∈negativeCnegL(f,y)J(w) = \sum_{i \in \text{positive}} C_{pos} L(f, y) + \sum_{i \in \text{negative}} C_{neg} L(f, y)J(w)=i∈positive∑CposL(f,y)+i∈negative∑CnegL(f,y)其中让 Cpos>CnegC_{pos} > C_{neg}Cpos>Cneg。
6.11 模型评估指标:超越准确率
当数据不平衡时,准确率 (Accuracy) 会失效,我们需要更精细的尺子。
1. 混淆矩阵 (Confusion Matrix)
- 真正例 (TP):真阳性。
- 假正例 (FP):误报(把好人当坏人)。
- 假负例 (FN):漏报(把坏人放走了)。
2. 精确率 (Precision) vs. 召回率 (Recall)
精确率P :TP/(TP+FP)TP / (TP + FP)TP/(TP+FP)。预测为正的里面,有多少是真的?(强调"抓得准")。
召回率R:TP/(TP+FN)TP / (TP + FN)TP/(TP+FN)。所有的正类里面,抓到了多少?(强调"抓得全")。
F1-score:两者的调和平均,用于综合评价。
3. ROC 曲线与 AUC 值 (核心考点)
- ROC 曲线:横轴是假正类率 (FPR),纵轴是真正类率 (TPR)。通过调节分类阈值(从 0 到 1),画出的一条曲线。
- AUC (Area Under Curve):ROC 曲线下的面积。
- 直观物理意义 :随机取一个正样本和一个负样本,模型给正样本打分高于负样本的分数的概率。
- 性质:AUC 越接近 1,模型排序能力越强;AUC = 0.5 等于随机瞎猜。
6.12 概率校准 (Probability Calibration)
有时候模型给出的"概率"并不是真实的频率(例如逻辑回归倾向于给出极端的 0 或 1)。
- Platt Scaling:在原始输出上再套一个逻辑回归。
- Isotonic Regression:一种非参数的校准方法。
6.13 名词术语记录
针对下面的术语,可以检测一下哪个术语还不理解,不理解的查一下,后面还会用到。
有监督学习、判别式模型、生成式模型、极大似然估计 (MLE)、最大后验估计 (MAP)、贝叶斯定理、结构风险最小化 (SRM)、最小二乘法 (LMS/OLS)、残差、正规方程、梯度下降、随机梯度下降 (SGD)、批梯度下降 (BGD)、学习率、L2正则化、岭回归 (Ridge)、L1正则化、Lasso、次梯度、Huber损失、逻辑回归、对数几率 (Logit)、Sigmoid函数、Softmax回归、交叉熵损失、高斯判别分析 (GDA)、感知机、线性可分、混淆矩阵、真正例 (TP)、假正例 (FP)、真负例 (TN)、假负例 (FN)、精确率 (Precision)、召回率 (Recall)、F1分数、ROC曲线、AUC值、欠采样、过采样、SMOTE算法、代价敏感学习、概率校准
第七章:支持向量机 (Support Vector Machine, SVM)
这一章SVM是模式识别的核心算法之一,它不像Logistic回归那样追求概率,而是直接找"最稳"的分界线。SVM的核心是最大化间隔。
7.1 间隔 (Margin) 与分类置信度
SVM从Logistic回归的置信度概念出发,但引入几何距离作为更可靠的"信心"指标。
在Logistic回归中,置信度通过Sigmoid函数定义:
P(y=1∣x)=11+e−wTx P(y=1|x) = \frac{1}{1+e^{-w^T x}} P(y=1∣x)=1+e−wTx1
- 推导动机 :wTxw^T xwTx 越大,表示样本越远离决策边界,分类越自信。但这只是概率视角,SVM问:除了概率,怎么量化"远离"?
SVM用点到超平面的距离作为置信度。在特征空间中,样本是点,决策边界是超平面,距离反映了"安全缓冲"。
细节要点
- 二分类问题:样本 (x,y),y∈{−1,1}(x, y), y \in \{-1, 1\}(x,y),y∈{−1,1}。
- 线性分类器:fw,b(x)=g(wTx+b)f_{w,b}(x) = g(w^T x + b)fw,b(x)=g(wTx+b),其中 g(z)=1g(z) = 1g(z)=1 如果 z≥0z \ge 0z≥0,否则 −1-1−1。
- 超平面:wTx+b=0w^T x + b = 0wTx+b=0。
【直观理解】:想象垃圾邮件分类,绿色点是Ham(正常邮件),红色点是Spam(垃圾)。决策线像"防火墙",点离墙越远,越自信不会"越界"。这比Logistic的"软概率"更"硬核",像找一条街把两帮人分开,还留出最大缓冲区避免打架。
补充:课件用Ham/Spam例子展示了多条可能线,但SVM选"最中间"那条------这预示了最大间隔。

7.2 函数间隔 (Functional Margin) 与几何间隔 (Geometric Margin)
函数间隔
对于样本 (xi,yi)(x^i, y^i)(xi,yi),函数间隔 γ^i=yi(wTxi+b)\hat{\gamma}^i = y^i (w^T x^i + b)γ^i=yi(wTxi+b)。
- 数据集整体:γ^=miniγ^i\hat{\gamma} = \min_i \hat{\gamma}^iγ^=miniγ^i。
推导动机 :为什么这样定义?因为yiy^iyi确保正负类同向:正类要wTxi+b≫0w^T x^i + b \gg 0wTxi+b≫0,负类≪0\ll 0≪0。大正值表示"正确且自信"。
变量解释:
- yiy^iyi:标签(1或-1)。
- wTxi+bw^T x^i + bwTxi+b:线性投影值。
- γ^i>0\hat{\gamma}^i > 0γ^i>0:正确分类;越大越自信。
几何间隔
几何间隔 γi=yi((w∥w∥2)Txi+b∥w∥2)\gamma^i = y^i \left( \left( \frac{w}{\|w\|_2} \right)^T x^i + \frac{b}{\|w\|_2} \right)γi=yi((∥w∥2w)Txi+∥w∥2b)。
- 数据集整体:γ=miniγi=γ^∥w∥2\gamma = \min_i \gamma^i = \frac{\hat{\gamma}}{\|w\|_2}γ=miniγi=∥w∥2γ^。
推导动机 :函数间隔会随www缩放而变(e.g., 倍增www,间隔也倍增),不稳定。几何间隔归一化∥w∥2=1\|w\|_2=1∥w∥2=1,获得尺度不变的"真实距离"------像量身高时统一单位。
变量解释:
- ∥w∥2\|w\|_2∥w∥2:权重范数(L2 norm)。
- w∥w∥2\frac{w}{\|w\|_2}∥w∥2w:单位方向向量。
- 如果∥w∥2=1\|w\|_2=1∥w∥2=1,函数与几何间隔相等。
对比表:函数间隔 vs 几何间隔
| 维度 | 函数间隔 (Functional Margin) | 几何间隔 (Geometric Margin) |
|---|---|---|
| 学习目标 | 最大化γ^\hat{\gamma}γ^,但易受www缩放影响 | 最大化γ\gammaγ,追求泛化能力(VC维界限) |
| 数据效率 | 适用于线性可分数据,但不鲁棒 | 更鲁棒,考虑实际距离,适合高维 |
| 典型算法 | 基础线性分类器 | SVM核心,结合QP求解 |
| 几何解释 | 投影值的大小 | 点到平面的欧氏距离 |
【直观理解】 :函数间隔像"标尺上的刻度",但标尺可伸缩;几何间隔像"实际步行距离",不变。特征空间中,点到线的垂直距离就是γ\gammaγ------SVM要让最近的点也"远走高飞"。
7.3 最优间隔分类器 (Optimal Margin Classifier)
线性SVM优化问题(假设线性可分):
minw,b12∥w∥22 \min_{w, b} \frac{1}{2} \|w\|_2^2 w,bmin21∥w∥22
s.t. yi(wTxi+b)≥1,i=1,...,Ny^i (w^T x^i + b) \geq 1, i=1,\dots,Nyi(wTxi+b)≥1,i=1,...,N。
推导动机 :最大化γ=1∥w∥2\gamma = \frac{1}{\|w\|_2}γ=∥w∥21 等价于最小化∥w∥22\|w\|_2^2∥w∥22(平方便于求导),约束确保函数间隔γ^=1\hat{\gamma}=1γ^=1。
变量解释:
- 12∥w∥22\frac{1}{2} \|w\|_2^221∥w∥22:正则项,控制模型复杂度。
- 约束:所有点至少间隔1。
输出:分离超平面 w∗Tx+b∗=0w^{*T} x + b^* = 0w∗Tx+b∗=0,判别函数 sign(w∗Tx+b∗)\text{sign}(w^{*T} x + b^*)sign(w∗Tx+b∗)。
【核心思想】 :像在两军阵前挖最宽的壕沟------壕沟宽度2∥w∥2\frac{2}{\|w\|_2}∥w∥22,支持向量是"壕沟边上的哨兵"。
典型例题 数据:x1=3,3T,y1=1x^1=3,3^T, y^1=1x1=3,3T,y1=1; x2=4,3T,y2=1x^2=4,3^T, y^2=1x2=4,3T,y2=1; x3=1,1T,y3=−1x^3=1,1^T, y^3=-1x3=1,1T,y3=−1。
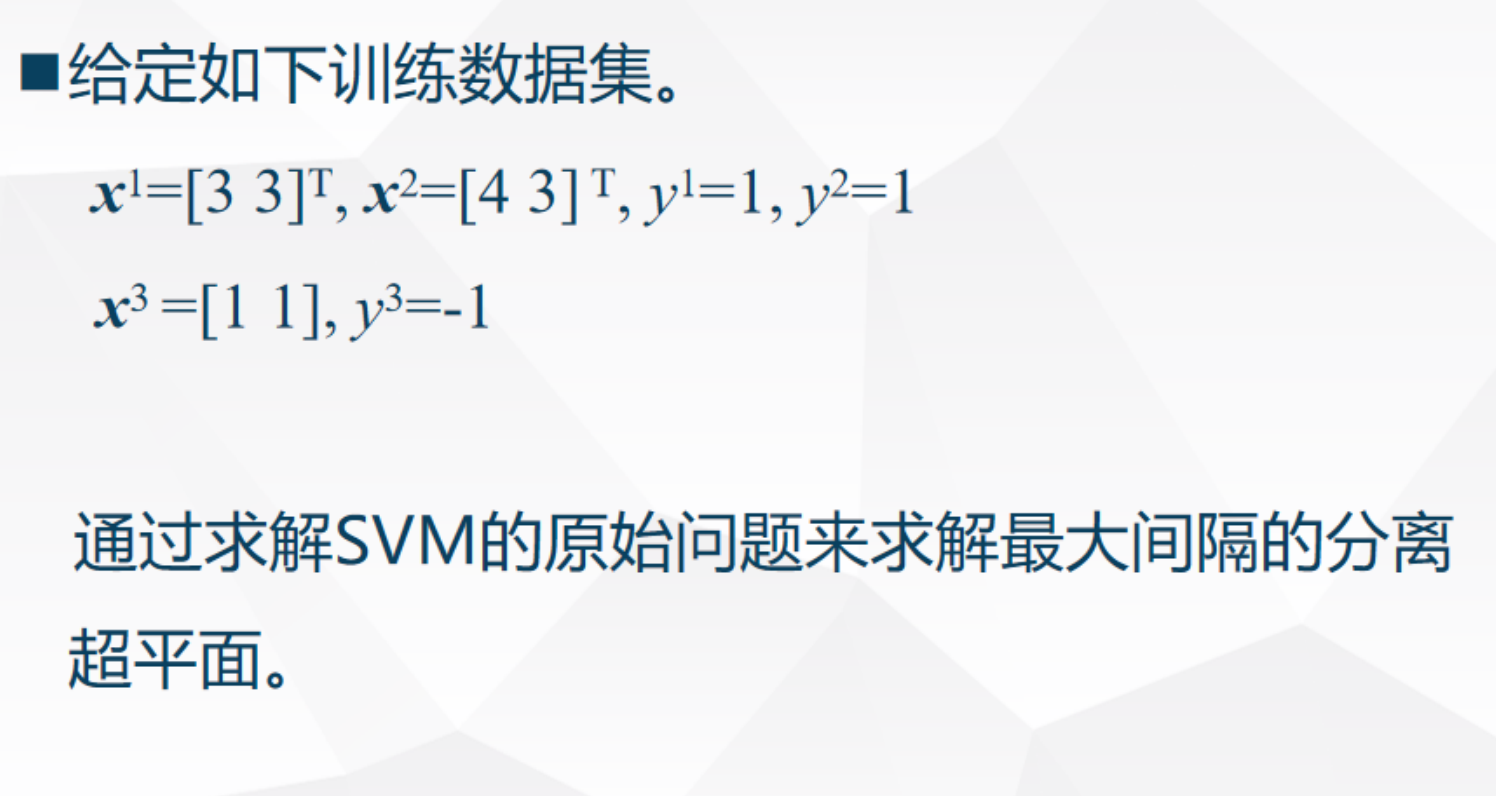
步骤1:设置约束yi(wTxi+b)≥1y^i (w^T x^i + b) \ge 1yi(wTxi+b)≥1。本题三个约束条件可以写成:
对于 x1x^1x1: 3w1+3w2+b=13w_1 + 3w_2 + b = 13w1+3w2+b=1
对于 x2x^2x2: 4w1+3w2+b≥14w_1 + 3w_2 + b \ge 14w1+3w2+b≥1
对于 x3x^3x3: 1w1+1w2+b=−11w_1 + 1w_2 + b = -11w1+1w2+b=−1
步骤2:目标min12(w12+w22)\min \frac{1}{2} (w_1^2 + w_2^2)min21(w12+w22)。
步骤3:求解得w∗=0.5,0.5T,b∗=−2w^*=0.5,0.5^T, b^*=-2w∗=0.5,0.5T,b∗=−2。
验证:带入x1x^1x1,0.5∗3+0.5∗3−2=1>00.5*3 + 0.5*3 -2=1>00.5∗3+0.5∗3−2=1>0,正确分开。
易混:为什么12\frac{1}{2}21?便于对偶推导时系数简洁。
一些需要注意的点:
点 x1(3,3)x^1(3,3)x1(3,3) 和 x3(1,1)x^3(1,1)x3(1,1) 是两类点中距离最近的"边界点"。它们支撑起了整个分类间隔,因此它们必须处于等号成立的状态。如果它们不取等号,间隔(Margin)就可以进一步扩大,那就不是"最大间隔"了。点 x2(4,3)x^2(4,3)x2(4,3) 是一个正样本,它在 x1x^1x1 的"后方",也就是更远离分类边界的地方。SVM 的通用约束要求是:yi(wTxi+b)≥1y^i(w^T x^i + b) \ge 1yi(wTxi+b)≥1。对于 x2x^2x2,代入我们算出的结果:0.5(4)+0.5(3)−2=1.50.5(4) + 0.5(3) - 2 = 1.50.5(4)+0.5(3)−2=1.5。显然 1.5>11.5 > 11.5>1,这说明 x2x^2x2 落在间隔边界之外的"安全区"。SVM 是一次"由少数人决定的选举":只有那两个取等号的支持向量在干活,那个取大于号的样本只是在旁边围观。
在刚才的例题中,只有 3 个样本,手动观察一下就能猜出谁是支持向量,然后列方程组。但如果是在实际应用中,样本量 NNN 极大,同时也无法扩展到高维。所以提出了拉格朗日对偶问题。
转换为拉格朗日对偶问题的主要目的:
- 方便求解:把复杂的不等式约束转化成较简单的等式约束。
- 打破维度限制:使 SVM 的复杂度由样本数(支持向量数)决定,而非特征维度决定。
- 开启非线性大门:没有对偶形式,就无法引入核函数,SVM 就只能处理像你例题中这样简单的线性数据,无法处理复杂的现实问题。
7.4 拉格朗日对偶问题 (Lagrange Dual)
一般情形
原问题:minwf(w)\min_w f(w)minwf(w) s.t. gi(w)≤0,hi(w)=0g_i(w) \le 0, h_i(w)=0gi(w)≤0,hi(w)=0。
拉格朗日函数:L(w,α,β)=f(w)+∑αigi+∑βihi,αi≥0L(w,\alpha,\beta) = f(w) + \sum \alpha_i g_i + \sum \beta_i h_i, \alpha_i \ge 0L(w,α,β)=f(w)+∑αigi+∑βihi,αi≥0。
对偶:maxα,βminwL\max_{\alpha,\beta} \min_w Lmaxα,βminwL。
推导动机 :原问题难解(约束多),对偶转成无约束max-min,凸问题下d∗=p∗d^*=p^*d∗=p∗(强对偶)。
KKT条件:梯度0、互补松弛αi∗gi(w∗)=0\alpha_i^* g_i(w^*)=0αi∗gi(w∗)=0等。
SVM对偶
SVM对偶:
maxα∑αi−12∑yiyjαiαj(xi)Txj \max_{\alpha} \sum \alpha_i - \frac{1}{2} \sum y^i y^j \alpha_i \alpha_j (x^i)^T x^j αmax∑αi−21∑yiyjαiαj(xi)Txj
s.t. αi≥0,∑αiyi=0\alpha_i \ge 0, \sum \alpha_i y^i =0αi≥0,∑αiyi=0。
w∗=∑αi∗yixiw^* = \sum \alpha_i^* y^i x^iw∗=∑αi∗yixi。
【直观理解】 :对偶像"影子戏法"------原问题追www,对偶用α\alphaα(仅支持向量α>0\alpha>0α>0)重构www,计算只剩内积,便于核扩展。几何上,支持向量"支撑"整个平面。
典型例题 :还是对于上面的例题,这里进行重新计算。
对偶优化:
maxα∑i=13αi−12∑i,j=13yiyjαiαj(xi)Txj \max_{\alpha} \sum_{i=1}^{3} \alpha_i - \frac{1}{2} \sum_{i,j=1}^{3} y^i y^j \alpha_i \alpha_j (x^i)^T x^j αmaxi=1∑3αi−21i,j=1∑3yiyjαiαj(xi)Txj
s.t. αi≥0\alpha_i \geq 0αi≥0, ∑i=13αiyi=0\sum_{i=1}^{3} \alpha_i y^i = 0∑i=13αiyi=0。(硬间隔,αi\alpha_iαi 上界无限)
步骤1:计算内积矩阵(Gram矩阵)
(xi)Txj(x^i)^T x^j(xi)Txj:
- x1⋅x1=3∗3+3∗3=18x^1 \cdot x^1 = 3*3 + 3*3 = 18x1⋅x1=3∗3+3∗3=18
- x1⋅x2=3∗4+3∗3=21x^1 \cdot x^2 = 3*4 + 3*3 = 21x1⋅x2=3∗4+3∗3=21
- x1⋅x3=3∗1+3∗1=6x^1 \cdot x^3 = 3*1 + 3*1 = 6x1⋅x3=3∗1+3∗1=6
- x2⋅x2=4∗4+3∗3=25x^2 \cdot x^2 = 4*4 + 3*3 = 25x2⋅x2=4∗4+3∗3=25
- x2⋅x3=4∗1+3∗1=7x^2 \cdot x^3 = 4*1 + 3*1 = 7x2⋅x3=4∗1+3∗1=7
- x3⋅x3=1∗1+1∗1=2x^3 \cdot x^3 = 1*1 + 1*1 = 2x3⋅x3=1∗1+1∗1=2
步骤2:计算二次项系数 yiyj(xi)Txjy^i y^j (x^i)^T x^jyiyj(xi)Txj
矩阵 QQQ(对称):
| i=1 (y=1) | i=2 (y=1) | i=3 (y=-1) | |
|---|---|---|---|
| j=1 | 1 * 1 * 18=18 | 1 * 1 * 21=21 | 1 * (-1) * 6=-6 |
| j=2 | 21 | 1 * 1 * 25=25 | 1*(-1)*7=-7 |
| j=3 | -6 | -7 | (-1)*(-1)*2=2 |
步骤3:约束 α1+α2−α3=0\alpha_1 + \alpha_2 - \alpha_3 = 0α1+α2−α3=0 (即 α3=α1+α2\alpha_3 = \alpha_1 + \alpha_2α3=α1+α2)
代入目标函数,只剩 α1,α2\alpha_1, \alpha_2α1,α2:
W(α1,α2)=α1+α2+α3−12(αTQα)W(\alpha_1, \alpha_2) = \alpha_1 + \alpha_2 + \alpha_3 - \frac{1}{2} (\alpha^T Q \alpha)W(α1,α2)=α1+α2+α3−21(αTQα)
因为 α3=α1+α2\alpha_3 = \alpha_1 + \alpha_2α3=α1+α2,展开二次项得:
W=α1+α2+(α1+α2)−12(18α12+25α22+2α32+42α1α2−12α1α3−14α2α3)W = \alpha_1 + \alpha_2 + (\alpha_1 + \alpha_2) - \frac{1}{2} (18\alpha_1^2 + 25\alpha_2^2 + 2\alpha_3^2 + 42\alpha_1\alpha_2 -12\alpha_1\alpha_3 -14\alpha_2\alpha_3)W=α1+α2+(α1+α2)−21(18α12+25α22+2α32+42α1α2−12α1α3−14α2α3)
代入 α3\alpha_3α3 并化简:
最终得到:W(α1,α2)=2(α1+α2)−4α12−10α1α2−6.5α22W(\alpha_1, \alpha_2) = 2(\alpha_1 + \alpha_2) - 4\alpha_1^2 - 10\alpha_1\alpha_2 - 6.5\alpha_2^2W(α1,α2)=2(α1+α2)−4α12−10α1α2−6.5α22
步骤4:求导置零
∂W∂α1=0⇒8α1+10α2=1\frac{\partial W}{\partial \alpha_1} = 0\Rightarrow 8\alpha_1 + 10\alpha_2 = 1∂α1∂W=0⇒8α1+10α2=1
∂W∂α2=0⇒10α1+13α2=2\frac{\partial W}{\partial \alpha_2} = 0 \Rightarrow 10\alpha_1 + 13\alpha_2 = 2∂α2∂W=0⇒10α1+13α2=2
解得:α₁ = 1.5, α₂ = -1(无效,因为α ≥ 0)。
临界点在可行域外,说明最大值在边界(α₁=0 或 α₂=0)。
步骤5:边界搜索
(最大化W)
α2=0\alpha_2=0α2=0 时:最优 α1=0.25\alpha_1 = 0.25α1=0.25,α3=0.25\alpha_3=0.25α3=0.25,W=0.25W=0.25W=0.25
α1=0\alpha_1=0α1=0 时:WWW 较小
最优:α∗=0.25,0,0.25\alpha^* = 0.25, 0, 0.25α∗=0.25,0,0.25
步骤6:恢复原参数
w∗=∑αi∗yixi=0.25⋅3,3T−0.25⋅1,1T=0.5,0.5Tw^* = \sum \alpha_i^* y^i x^i = 0.25 \cdot 3,3^T - 0.25 \cdot 1,1^T = 0.5, 0.5^Tw∗=∑αi∗yixi=0.25⋅3,3T−0.25⋅1,1T=0.5,0.5T
∥w∗∥2=0.5≈0.707\|w^*\|_2 = \sqrt{0.5} \approx 0.707∥w∗∥2=0.5 ≈0.707
用支持向量计算b∗b^*b∗(取x1x^1x1):
y1(w∗Tx1+b∗)=1⇒0.5⋅3+0.5⋅3+b∗=1⇒b∗=−2y^1 (w^{*T} x^1 + b^*) = 1 \Rightarrow 0.5\cdot3 + 0.5\cdot3 + b^* =1 \Rightarrow b^* = -2y1(w∗Tx1+b∗)=1⇒0.5⋅3+0.5⋅3+b∗=1⇒b∗=−2
步骤7:决策函数
分离超平面:0.5x1+0.5x2−2=00.5 x_1 + 0.5 x_2 - 2 = 00.5x1+0.5x2−2=0,即 x1+x2=4x_1 + x_2 = 4x1+x2=4。
判别函数:f(x)=sign(0.5x1+0.5x2−2)f(x) = \text{sign}(0.5 x_1 + 0.5 x_2 - 2)f(x)=sign(0.5x1+0.5x2−2)。
几何间隔:γ=1/∥w∗∥2=2≈1.414\gamma = 1 / \|w^*\|_2 = \sqrt{2} \approx 1.414γ=1/∥w∗∥2=2 ≈1.414。
步骤8:验证分类与约束
x1x^1x1:0.5⋅3+0.5⋅3−2=10.5\cdot3 + 0.5\cdot3 -2 =10.5⋅3+0.5⋅3−2=1,y1⋅1=1y^1 \cdot 1 =1y1⋅1=1(紧约束,支持向量)
x2x^2x2:0.5⋅4+0.5⋅3−2=1.50.5\cdot4 + 0.5\cdot3 -2 =1.50.5⋅4+0.5⋅3−2=1.5,y2⋅1.5=1.5>1y^2 \cdot 1.5 =1.5 >1y2⋅1.5=1.5>1
x3x^3x3:0.5⋅1+0.5⋅1−2=−10.5\cdot1 + 0.5\cdot1 -2 =-10.5⋅1+0.5⋅1−2=−1,y3⋅(−1)=1y^3 \cdot (-1) =1y3⋅(−1)=1(紧约束,支持向量)
所有样本正确分类,最近点函数间隔正好1。
7.5 软间隔分类器 (Soft Margin SVM)
当数据不可分,引入松弛ξi\xi_iξi:
minw,b12∥w∥22+C∑ξi \min_{w,b} \frac{1}{2} \|w\|_2^2 + C \sum \xi_i w,bmin21∥w∥22+C∑ξi
s.t. yi(wTxi+b)≥1−ξi,ξi≥0y^i (w^T x^i + b) \ge 1 - \xi_i, \xi_i \ge 0yi(wTxi+b)≥1−ξi,ξi≥0。
推导动机 :硬间隔太严,允许"违规"但罚款CξiC \xi_iCξi(Hinge损失max(0,1−z)\max(0,1-z)max(0,1−z))。
对偶同线性,但0≤αi≤C0 \le \alpha_i \le C0≤αi≤C。
变量解释:
- CCC:正则参数,越大越"硬"。
- ξi\xi_iξi:违规距离。
对比表:硬间隔 vs 软间隔
| 维度 | 硬间隔 SVM | 软间隔 SVM |
|---|---|---|
| 学习目标 | 完美分开 | 允许噪声,平衡误差与间隔 |
| 数据效率 | 需线性可分 | 鲁棒于噪声/离群点 |
| 典型算法 | 线性SVM原问题 | Hinge损失 + C调参 |
| 几何解释 | 所有点外侧 | 部分点可"入侵"间隔 |
【直观理解】 :硬间隔像完美主义者,软间隔像务实派------允许少数"叛徒"越界,但用CCC控制"叛军规模"。物理意义:现实数据有噪声,软间隔提高泛化,像缓冲区允许小震动。
典型例题 :加噪声点到上例,假设一负类点移近。设C=1C=1C=1,求对偶,得更大ξ\xiξ,间隔稍小但容忍噪声。
验证:测试点分类准确率升(过拟合降)。
7.6 非线性SVM与核技巧 (Kernel Trick)
用ϕ(x)\phi(x)ϕ(x)映射到高维:
对偶中替换(xi)Txj→K(xi,xj)=ϕ(xi)Tϕ(xj)(x^i)^T x^j \to K(x^i, x^j) = \phi(x^i)^T \phi(x^j)(xi)Txj→K(xi,xj)=ϕ(xi)Tϕ(xj)。
常见核:多项式K=(xTz+1)pK=(x^T z +1)^pK=(xTz+1)p;高斯K=exp(−∥x−z∥2/2σ2)K=\exp(-\|x-z\|^2 / 2\sigma^2)K=exp(−∥x−z∥2/2σ2)。
推导动机 :低维不可分,高维可分("卷积"空间)。核避免显式ϕ\phiϕ,只算内积。
变量解释:
- KKK:核函数,必须半正定(Gram矩阵)。
- σ\sigmaσ:RBF带宽,控制"局部"影响。
【核心思想】:核像"传送门"------不进高维门,就用门计算距离。几何:低维圈圈点,高维拉开成线性。物理:像透镜弯曲空间,让弯路变直。
典型例题 :XOR问题(非线性),用RBF核σ=1\sigma=1σ=1。
步骤1:计算Gram矩阵。步骤2:对偶求α\alphaα。步骤3:判别f(x)=∑αiyiK(xi,x)+bf(x)=\sum \alpha_i y^i K(x^i,x) +bf(x)=∑αiyiK(xi,x)+b。
验证:带入(0,0)得-1,(0,1)得1,正确分开。
易混:高斯核无限维,泛化好但易过拟合------调σ\sigmaσ。
支持向量回归 (SVR)
SVR:回归版SVM,用ϵ\epsilonϵ-不敏感损失。
原问题:
minw,b12∥w∥2+C∑(ξi++ξi−) \min_{w,b} \frac{1}{2} \|w\|^2 + C \sum (\xi_i^+ + \xi_i^-) w,bmin21∥w∥2+C∑(ξi++ξi−)
s.t. ∣yi−(wTxi+b)∣≤ϵ+ξ|y^i - (w^T x^i + b)| \le \epsilon + \xi∣yi−(wTxi+b)∣≤ϵ+ξ 等。
推导动机 :分类追求间隔,回归追求"管带"------误差≤ϵ\le \epsilon≤ϵ无罚,超则线性罚。
对偶类似,核适用。
【直观理解】 :像公路两侧护栏,车在ϵ\epsilonϵ内随意,碰栏罚款。支持向量是"碰栏的车",稀疏解高效。
多类SVM与理论基础
多类:一对多,或联合优化min12∥w∥2+C∑ξi\min \frac{1}{2} \|w\|^2 + C \sum \xi_imin21∥w∥2+C∑ξi,约束∀j≠yi:wyiTxi≥wjTxi+1−ξi\forall j \ne y^i: w_{y^i}^T x^i \ge w_j^T x^i +1 - \xi_i∀j=yi:wyiTxi≥wjTxi+1−ξi。
理论:Vapnik定理,VC维h≤min(4r2/ρ2,m)+1h \le \min(4r^2 / \rho^2, m)+1h≤min(4r2/ρ2,m)+1,最大ρ\rhoρ(间隔)最小化复杂度。
【直观理解】:多类像多面墙,每类一墙。理论意义:大间隔=小VC维=好泛化,像宽路少事故。
SVM 与 Logistic回归 (LR) 对比
对比表:SVM vs LR
| 维度 | SVM | LR |
|---|---|---|
| 学习目标 | 最大间隔(结构风险) | 最大似然(经验风险) |
| 数据效率 | 小样本高维强 | 大样本需平衡 |
| 典型算法 | Hinge损失 + 对偶 | 交叉熵 + 梯度下降 |
| 其他 | 无概率,自带正则;仅支持向量计算 | 有概率,受分布影响;全样本计算 |
【核心思想】:SVM"少数决定多数"(支持向量),LR"民主投票"(所有点)。SVM更"精英主义",适合稀疏高维。
序列最小优化 (SMO) 算法
SMO:高效解SVM对偶,迭代更新一对α\alphaα。
流程:选违KKT的α1\alpha_1α1,选使变化大的α2\alpha_2α2,更新α2=α2old+y2(E1−E2)/η\alpha_2 = \alpha_2^{old} + y^2 (E_1 - E_2)/\etaα2=α2old+y2(E1−E2)/η,clip到L,H。
推导动机 :全QP慢,SMO分解子问题,保持∑αy=0\sum \alpha y=0∑αy=0。
变量解释:
- Ei=f(xi)−yiE_i = f(x^i) - y^iEi=f(xi)−yi:预测误差。
- η=2K12−K11−K22\eta = 2K_{12} - K_{11} - K_{22}η=2K12−K11−K22:二次系数。
【直观理解】:像爬山但两人手拉手(约束),每次只动两人,选"最陡坡"。几何:调整支持向量"拉紧"平面。
典型例题 :上数据,初始化α=0\alpha=0α=0。步骤1:选α1\alpha_1α1(违KKT)。步骤2:计算η,E\eta, Eη,E更新。迭代至收敛,得同上α∗\alpha^*α∗。
验证:目标函数上升,KKT满足。
难点:变量选择启发式------优先边界点。
第八章 聚类
8.1 聚类简介与距离度量函数
聚类本质上是"物以类聚"------没有标签,就靠数据自身的结构分组。
详细定义
- 有监督学习 :给定数据集 {xi,yi}i=1N\{x^i, y^i\}_{i=1}^N{xi,yi}i=1N,学习输入 xxx 到输出 yyy 的映射 y=f(x)y = f(x)y=f(x)。
- 类型:分类(yyy 是类别标签)、回归(yyy 是连续值)、排序(yyy 是有序数值)。
- 无监督学习 :只给定 {xi}i=1N\{x^i\}_{i=1}^N{xi}i=1N,寻找数据内在结构 z=f(x)z = f(x)z=f(x)。
- 类型:概率密度估计、聚类(zzz 是簇标号)、降维/可视化。
【直观理解】:有监督像"老师给答案练题",无监督像"自己摸索规律"。几何上,有监督在标签空间画分界线,无监督在特征空间找"天然团块"。
对比表:有监督 vs. 无监督学习
| 维度 | 有监督学习 | 无监督学习 |
|---|---|---|
| 学习目标 | 预测标签 yyy,最小化预测误差 | 发现内在结构 zzz,如分组或压缩 |
| 数据效率 | 需要大量带标签数据,标注昂贵 | 只需原始数据,易获取但需处理噪声 |
| 典型算法 | SVM、神经网络(分类/回归) | K均值、GMM、PCA |
| 评价难度 | 易(准确率/MSE) | 难(内部指标如轮廓系数) |
| 应用场景 | 图像识别、预测 | 数据探索、异常检测、预处理 |
为什么无监督学习?
- 原始数据易得,标注贵("我们缺的不是数据,而是带标签的数据")。
- 降低存储/计算、降噪、探索性分析、可视化、作为有监督预处理。
【直观理解】:像探矿------有监督是按图挖金,无监督是先勘探地形找矿脉。
典型例题:区分学习类型
数据集:学生成绩 xxx(数学、语文分),yyy:是否及格。
- 步骤1 :用 xxx 预测 yyy → 有监督。
- 步骤2 :只用 xxx 分组(如理科生 vs. 文科生) → 无监督(聚类)。
- 验证:无标签时靠"距离"分组,符合现实(相似成绩的学生常一类)。
核心概念:聚类的定义与类型
聚类:根据样本间距离/相似度,分成簇(cluster)。原则:簇内相似(距离小),簇间不相似(距离大)。
簇的概念模糊性
同一个数据集可分不同簇数(课件示意图:多少个簇?2/4/6都可能)。
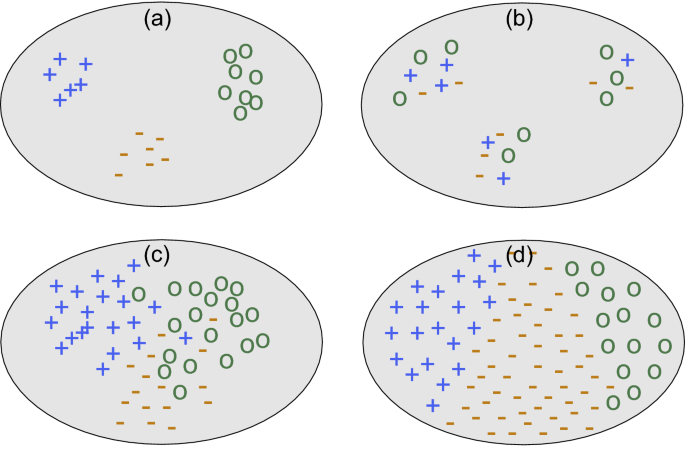
簇的类型
- 基于中心的簇 :点靠近质心 μk\mu^kμk(球形)。
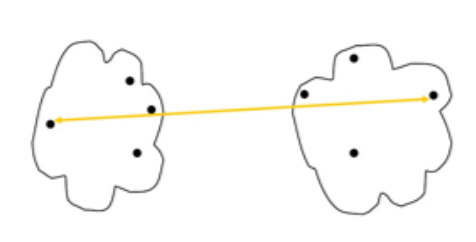
- 基于邻接的簇:点间连接(链状)。
- 基于密度的簇:高密度区 vs. 低密度分离(任意形状)。
- 基于概念的簇:共享抽象性质(难检测,非以上三种)。
【直观理解】:中心型像"太阳系"(行星围中心);邻接型像"葡萄串";密度型像"城市 vs. 郊区"(闹市区连片);概念型像"交友圈交集"。几何:密度型最灵活,能处理月牙形(K均值办不到)。
聚类的应用
- 客户分群、社交社区、图像分割、异常检测、人类种系分析等。
8.2 三要素
- 自适应性强(样本数、维度、需求)。
- 三要素 :
- 定义"远近"(距离/相似性函数)。
- 评价质量(评价函数)。
- 获得簇(表示、优化算法、停止条件)。
聚类无绝对正确答案,全看应用。常见坑:数据形状不对选错类型(如球形数据用密度型浪费)。
核心概念:距离度量函数(三要素之一)
如何定义样本"远近"?取决于特征类型(数值、类别、文本等)。
详细公式
-
闵可夫斯基距离 (Minkowski):
dist(xi,xj)=(∑d=1D∣xi,d−xj,d∣p)1/p \text{dist}(x^i, x^j) = \left( \sum_{d=1}^{D} |x_{i,d} - x_{j,d}|^p \right)^{1/p} dist(xi,xj)=(d=1∑D∣xi,d−xj,d∣p)1/p变量解释:
- xi,xjx^i, x^jxi,xj:D维样本向量。
- ppp:阶数(控制敏感度)。
- 特例:
- p=2p=2p=2:欧氏距离 ∑(xi,d−xj,d)2\sqrt{\sum (x_{i,d} - x_{j,d})^2}∑(xi,d−xj,d)2 。
- p=1p=1p=1:曼哈顿距离 ∑∣xi,d−xj,d∣\sum |x_{i,d} - x_{j,d}|∑∣xi,d−xj,d∣。
- p=∞p=\inftyp=∞:切比雪夫距离 max∣xi,d−xj,d∣\max |x_{i,d} - x_{j,d}|max∣xi,d−xj,d∣。
推导动机 :从向量范数泛化而来。ppp 大时敏感最大差(极端值主导),ppp 小时平均差。注意:尺度不一致需标准化(否则高量纲特征霸屏)。
-
余弦相似度 (方向敏感,常见于文本):
s(xi,xj)=(xi)Txj∥xi∥∥xj∥=∑xi,dxj,d∑xi,d2∑xj,d2 s(x^i, x^j) = \frac{(x^i)^T x^j}{\|x^i\| \|x^j\|} = \frac{\sum x_{i,d} x_{j,d}}{\sqrt{\sum x_{i,d}^2} \sqrt{\sum x_{j,d}^2}} s(xi,xj)=∥xi∥∥xj∥(xi)Txj=∑xi,d2 ∑xj,d2 ∑xi,dxj,d变量解释:分子点积(方向重合),分母长度归一。
推导动机:欧氏测绝对距离,余弦测角度(忽略向量长度)。为什么?文档中"长短文"方向一致就相似。
【直观理解】:欧氏像"直线飞行距离";曼哈顿像"走马路网格";余弦像"看两个箭头夹角"(单位圆上投影)。几何:余弦把点投到单位球,完美忽略尺度。物理意义:高维"维度诅咒"时欧氏失效,余弦更稳。
典型例题:计算距离
样本:x1=1,2x^1 = 1, 2x1=1,2,x2=3,4x^2 = 3, 4x2=3,4。
- 步骤1 :欧氏:(3−1)2+(4−2)2=8≈2.83\sqrt{(3-1)^2 + (4-2)^2} = \sqrt{8} \approx 2.83(3−1)2+(4−2)2 =8 ≈2.83(绝对位置)。
- 步骤2 :曼哈顿:∣3−1∣+∣4−2∣=4|3-1| + |4-2| = 4∣3−1∣+∣4−2∣=4(网格路径)。
- 步骤3 :余弦:分子 1⋅3+2⋅4=111\cdot3 + 2\cdot4 = 111⋅3+2⋅4=11,分母 5⋅25≈11.18\sqrt{5} \cdot \sqrt{25} \approx 11.185 ⋅25 ≈11.18,s≈0.98s \approx 0.98s≈0.98(方向几乎相同)。
- 验证 :若 x2=6,8x^2 = 6,8x2=6,8(倍数),欧氏变大(≈5.66\approx5.66≈5.66),余弦仍 0.980.980.98。符合:余弦只看方向。
聚类性能评价概述
聚类质量的核心追求:簇内相似度越高越好,簇间相似度越低越好 。
评价方法分为两大类:
- 外部评价(external criterion):把聚类结果和某个"参考标准"(通常是人工标注的真实类别)进行对比
- 内部评价(internal criterion):只看聚类结果本身,不需要任何参考标签
外部评价 vs 内部评价 对比表
| 对比维度 | 外部评价 | 内部评价 |
|---|---|---|
| 是否需要参考标签 | 需要(真实类别或专家标注) | 不需要 |
| 客观性 | 较高(有标准答案) | 较低(主观性强) |
| 适用场景 | 算法开发、基准测试、学术对比 | 真实无标签场景、选K值、日常应用 |
| 典型指标 | JC、FMI、Rand Index | 轮廓系数、DBI、Dunn、CHI |
| 计算难度 | 中等(需计数样本对) | 简单到中等(主要算距离) |
外部评价指标(需要参考模型)
假设我们有聚类结果 C = {C₁, C₂, ..., Cₖ} 和参考真实类别 C* = {C₁*, ..., Cₖ*}
我们关注的是样本对在两种划分下是否一致,共四种情况:
- a:两种划分都认为同一类(同簇且同真实类)
- b:聚类认为同一类,但真实不同类
- c:聚类认为不同类,但真实同一类
- d:两种划分都认为不同类
三种常用外部指标(都追求越高越好,范围0,1)
-
Jaccard系数 (JC)
JC=aa+b+c JC = \frac{a}{a + b + c} JC=a+b+ca只看"聚类说同类"的对中,有多少真的同类(类似precision,但忽略了d)
-
Fowlkes-Mallows指数 (FMI)
FMI=aa+b×aa+c FMI = \sqrt{ \frac{a}{a+b} \times \frac{a}{a+c} } FMI=a+ba×a+ca几何平均了 precision 和 recall,很平衡
-
Rand指数 (RI)
RI=2(a+d)N(N−1) RI = \frac{2(a + d)}{N(N-1)} RI=N(N−1)2(a+d)整体正确率(把a和d都算作正确)
直观理解
想象你在判断两个人是不是"真朋友":
- a = 你们俩都觉得是朋友,而且确实是
- b = 你觉得是朋友,其实不是(假阳性)
- c = 你觉得不是朋友,其实是(假阴性)
- d = 你们都觉得不是朋友,也确实不是
JC只看你"说朋友"的时候准不准,RI看整体对错率。
内部评价指标(最常用,无需标签)
核心思想:好的聚类应该
- 簇内点尽可能靠近(紧凑)
- 不同簇尽可能远离(分离)
最重要、最常考的指标:轮廓系数 (Silhouette Index)
对每一个样本点 i 计算:
- a(i)a(i)a(i) = 该点到同簇其他所有点的平均距离(越小越好,表示簇内紧)
- b(i)b(i)b(i) = 该点到最近的另一个簇中所有点的平均距离(越大越好,表示簇间远)
轮廓宽度:
s(i)=b(i)−a(i)max{a(i),b(i)} s(i) = \frac{b(i) - a(i)}{\max\{a(i), b(i)\}} s(i)=max{a(i),b(i)}b(i)−a(i)
- s(i)∈−1,1s(i) \in -1, 1s(i)∈−1,1
- 接近1:非常好(i被很好地聚在自己的簇里)
- 接近0:i在边界上
- 负值:i可能被错分到别的簇了
整体轮廓系数:
SI=1N∑i=1Ns(i) SI = \frac{1}{N} \sum_{i=1}^N s(i) SI=N1i=1∑Ns(i)
直观比喻
轮廓系数就像给每个同学打"归属感"分数:
- 坐在自己班中间、离隔壁班很远 → 分很高
- 坐在门口、跟隔壁班更亲近 → 分很低甚至负分
其他常用内部指标(了解即可,考试常考轮廓)
-
DB指数 (Davies-Bouldin Index) :越小越好
DBI=1K∑k=1Kmaxl≠k(簇内平均距离k+簇内平均距离l两个簇中心距离) DBI = \frac{1}{K} \sum_{k=1}^K \max_{l \neq k} \left( \frac{\text{簇内平均距离}_k + \text{簇内平均距离}_l}{\text{两个簇中心距离}} \right) DBI=K1k=1∑Kl=kmax(两个簇中心距离簇内平均距离k+簇内平均距离l) -
Dunn指数 :越大越好
DI=min(簇间最小距离)max(簇内最大直径) DI = \frac{\min(\text{簇间最小距离})}{\max(\text{簇内最大直径})} DI=max(簇内最大直径)min(簇间最小距离) -
Calinski-Harabasz指数 (CHI,也叫方差比准则) :越大越好,计算快,常用于自动选K
CHI=tr(B)tr(W)×N−KK−1 CHI = \frac{\text{tr}(B)}{\text{tr}(W)} \times \frac{N-K}{K-1} CHI=tr(W)tr(B)×K−1N−K(tr(B)反映簇间散布,tr(W)反映簇内散布,像方差分析的F值)
典型例题(手动计算轮廓系数)
假设有3个点,欧氏距离:
- 点A、B在簇1,dist(A,B)=2
- 点C在簇2
- dist(A,C)=5,dist(B,C)=5
计算点A的轮廓系数:
- a(A) = 到同簇点B的距离 = 2
- b(A) = 到最近其他簇(簇2)的平均距离 = 5
- s(A) = (5 - 2) / max(5, 2) = 3/5 = 0.6
同理 s(B)=0.6,s( C)(单点簇,a( C)=0,b( C)=5)= (5-0)/5 = 1.0
平均轮廓系数 ≈ (0.6 + 0.6 + 1.0)/3 ≈ 0.73 → 聚类质量较好
如果把C挪到簇1里,所有点间距变小,a(i)大幅增加,s(i)会下降甚至变负 → 说明合并后质量变差。
总结
外部评价看"和标准像不像",内部评价看"自己整不整齐"。
实际项目里主要靠轮廓系数 + CHI 来判断聚类好坏和选K值。
聚类算法总体框架
聚类算法主要分四类(按聚类类型分类):
- 基于中心的:如K均值(K-means)、K-medoids(用中位数代替均值)
- 基于概率分布的:如高斯混合模型(GMM)+ EM算法
- 基于连接性的:如层次聚类(Hierarchical Clustering)
- 基于密度的:如DBSCAN、Mean Shift
算法分类对比表(方便你快速区分)
| 算法类型 | 代表算法 | 簇形状假设 | 需要预设K? | 对噪声/离群点鲁棒性 | 典型缺点 |
|---|---|---|---|---|---|
| 基于中心 | K-means, K-medoids | 球形/凸形 | 是 | 差(易受离群影响) | 非凸、初始化敏感、假设簇等大 |
| 基于概率 | GMM + EM | 椭球形 | 是 | 中等 | 计算慢、收敛慢 |
| 基于连接 | 层次聚类 | 任意 | 否 | 中等 | 不可逆、链式效应 |
| 基于密度 | DBSCAN | 任意 | 否 | 强 | 参数ε、MinPts敏感 |
K均值聚类(K-means)------核心算法
问题定义
给定N个样本 {xi}i=1N\{x^i\}_{i=1}^N{xi}i=1N,分成K个簇。输入:数据D、簇数K。
基本算法流程(PAGE 31):
- 随机选K个点作为初始中心 μ1,...,μK\mu^1, \dots, \mu^Kμ1,...,μK
- 重复直到收敛:
- 每个样本 xix^ixi 分配到最近的中心:zi=argmink∥xi−μk∥2z_i = \arg\min_k \|x^i - \mu^k\|^2zi=argmink∥xi−μk∥2
- 更新每个中心:μk=1∣Ck∣∑xi∈Ckxi\mu^k = \frac{1}{|C_k|} \sum_{x^i \in C_k} x^iμk=∣Ck∣1∑xi∈Ckxi
优化目标(损失函数)
平方误差和(SSE):
J=∑i=1N∑k=1Kri,k∥xi−μk∥2 J = \sum_{i=1}^N \sum_{k=1}^K r_{i,k} \|x^i - \mu^k\|^2 J=i=1∑Nk=1∑Kri,k∥xi−μk∥2
其中 ri,k=1r_{i,k} = 1ri,k=1 如果 xix^ixi 属于簇k,否则0(硬分配)。
变量解释
- ri,kr_{i,k}ri,k:从属指示(硬0/1)
- μk\mu^kμk:第k簇的质心
- JJJ:总平方误差,越小越好
推导动机
J本质是"点到自己簇中心的距离平方和"。为什么平方?放大远点惩罚,优化时更稳定(类似梯度下降)。
迭代优化(鸡生蛋问题)
- 固定 μk\mu^kμk → 分配 ri,kr_{i,k}ri,k(最近邻)
- 固定 ri,kr_{i,k}ri,k → 更新 μk\mu^kμk(均值)
交替下降J,J单调递减 → 一定收敛。
收敛性
- 坐标下降法,J非凸 → 收敛到局部最优(可能震荡,但实际少见)
- 解:多次运行,取J最小的结果
初始化方法
随机初始化容易坏------K-means++(scikit-learn默认):
- 随机选第一个中心
- 后续中心按距离平方概率选(远点概率大)
→ 质心初始远离,收敛更快更好
K的选择
- 肘部法:画K vs J曲线,找"拐点"
- 轮廓系数/CHI:K增加时,质量先升后降,取峰值
- Gap Statistic、交叉验证(监督任务上用)
K-means的局限性
- 假设簇球形、等大小、等密度 → 非球形/不同密度会崩
- 离群点拉偏中心
- 硬分配 → 小扰动可能跳簇
- 改进:用GMM(软分配+椭球)、DBSCAN(密度)、K-medoids(中位数抗噪)
直观理解
K-means像"抢地盘":每个中心是国王,点谁近谁的兵。迭代就是"国王换位置,士兵再站队"。几何:每次更新中心是"质心"(重心),像物理平衡。坑点:如果初始国王选得差,就只能抢到小地盘(局部最优)。
典型例题:手动迭代一次K-means
数据:2D点
A(1,1), B(2,1), C(1,2), D(6,6), E(7,7), F(6,7)
设K=2,初始中心 μ1=(2,1.5)\mu_1 = (2,1.5)μ1=(2,1.5)(红),μ2=(6.5,6.5)\mu_2 = (6.5,6.5)μ2=(6.5,6.5)(蓝)
步骤1:计算每个点到两个中心的距离(欧氏)
- A到μ1\mu_1μ1:(1−2)2+(1−1.5)2=1+0.25=1.12\sqrt{(1-2)^2 + (1-1.5)^2} = \sqrt{1+0.25}=1.12(1−2)2+(1−1.5)2 =1+0.25 =1.12
到μ2\mu_2μ2:(1−6.5)2+(1−6.5)2≈7.78\sqrt{(1-6.5)^2 + (1-6.5)^2} \approx 7.78(1−6.5)2+(1−6.5)2 ≈7.78 → 分到簇1 - 同理:B、C到簇1;D、E、F到簇2
步骤2 :更新中心
簇1:A,B,C → μ1new=((1+2+1)/3,(1+1+2)/3)=(1.33,1.33)\mu_1^{new} = ( (1+2+1)/3, (1+1+2)/3 ) = (1.33, 1.33)μ1new=((1+2+1)/3,(1+1+2)/3)=(1.33,1.33)
簇2:D,E,F → μ2new=(6.33,6.67)\mu_2^{new} = (6.33, 6.67)μ2new=(6.33,6.67)
步骤3:验证新分配(重新算距离)
- 所有点分配不变 → 收敛
- J下降(新中心更近)
如果初始中心选差 (如μ1=(1,1),μ2=(7,7)\mu_1=(1,1), \mu_2=(7,7)μ1=(1,1),μ2=(7,7))
- 迭代后可能把A,B,C,D,E,F全分到一簇 → 坏结果
→ 证明初始化关键!
总结
K-means是"简单暴力"的聚类王者:快、易并行、适合大数据。但记住它的假设(球形簇),数据不对就换GMM或DBSCAN。
8.3 高斯混合模型(GMM)+ EM算法
高斯混合模型(Gaussian Mixture Model, GMM) ,它可以看作是K-means的概率版、软分配版、椭球版。
为什么需要GMM?(K-means的痛点)
K-means的假设太强了:
- 每个点100%属于一个簇(硬分配)→ 边界点容易跳来跳去
- 簇必须是球形且方差差不多(欧氏距离+均值)
- 所有簇出现概率相等(π_k = 1/K)
现实数据经常是椭球形、不同大小、不同密度 → K-means直接裂开。
GMM的直观想法
我们假设数据是由K个高斯分布"混合"生成的:
- 先按概率π_k抽一个高斯成分k(k=1,...,K)
- 再从这个高斯N(μ_k, Σ_k)里采样一个点
这样:
- 簇可以是任意方向、大小的椭球(靠协方差Σ_k)
- 每个点属于每个簇都有概率(软分配)
- 不同簇可以有不同权重π_k
GMM模型公式
观测数据概率密度:
p(x)=∑k=1KπkN(x∣μk,Σk) p(x) = \sum_{k=1}^K \pi_k \mathcal{N}(x | \mu_k, \Sigma_k) p(x)=k=1∑KπkN(x∣μk,Σk)
其中:
- πk\pi_kπk:混合系数,∑πk=1\sum \pi_k = 1∑πk=1
- N(x∣μk,Σk)\mathcal{N}(x | \mu_k, \Sigma_k)N(x∣μk,Σk):均值μ_k、协方差Σ_k的高斯
目标:用最大似然估计参数θ = {π_k, μ_k, Σ_k}
对数似然:
ℓ(θ)=∑i=1Nlog(∑k=1KπkN(xi∣μk,Σk)) \ell(\theta) = \sum_{i=1}^N \log \left( \sum_{k=1}^K \pi_k \mathcal{N}(x^i | \mu_k, \Sigma_k) \right) ℓ(θ)=i=1∑Nlog(k=1∑KπkN(xi∣μk,Σk))
问题:log里还有sum → 直接求导=0没有闭式解,参数耦合严重 → 无法直接优化。
解决方案:引入隐变量z(EM算法登场)
为每个样本xi引入一个K维独热隐变量zi(zi_k = 1表示来自第k个高斯)
联合分布:
p(x,z)=∏k=1KπkN(x∣μk,Σk)zk p(x, z) = \prod_{k=1}^K \\pi_k \\mathcal{N}(x \| \\mu_k, \\Sigma_k)^{z_k} p(x,z)=k=1∏KπkN(x∣μk,Σk)zk
完整数据对数似然(如果z已知就简单了):
ℓc(θ)=∑i=1N∑k=1Kziklogπk+logN(xi∣μk,Σk) \ell_c(\theta) = \sum_{i=1}^N \sum_{k=1}^K z_{i k} \left \\log \\pi_k + \\log \\mathcal{N}(x\^i \| \\mu_k, \\Sigma_k) \\right ℓc(θ)=i=1∑Nk=1∑Kziklogπk+logN(xi∣μk,Σk)
z未知 → 用EM算法迭代"猜z → 更新参数 → 再猜z"。
EM算法两步(超级好记)
E步(Expectation) :用当前参数算每个点属于每个簇的后验概率(软分配)
rik≜P(zik=1∣xi,θold)=πkoldN(xi∣μkold,Σkold)∑jπjoldN(xi∣μjold,Σjold) r_{i k} \triangleq P(z_{i k}=1 | x^i, \theta^{\text{old}}) = \frac{\pi_k^{\text{old}} \mathcal{N}(x^i | \mu_k^{\text{old}}, \Sigma_k^{\text{old}})}{\sum_{j} \pi_j^{\text{old}} \mathcal{N}(x^i | \mu_j^{\text{old}}, \Sigma_j^{\text{old}})} rik≜P(zik=1∣xi,θold)=∑jπjoldN(xi∣μjold,Σjold)πkoldN(xi∣μkold,Σkold)
r_{i k} ∈ 0,1,∑k r{i k} = 1 → 就是"责任"(responsibility)
M步(Maximization) :用r当权重,更新参数(加权版本的均值、协方差、混合系数)
πknew=∑irikN \pi_k^{\text{new}} = \frac{\sum_i r_{i k}}{N} πknew=N∑irik
μknew=∑irikxi∑irik \mu_k^{\text{new}} = \frac{\sum_i r_{i k} x^i}{\sum_i r_{i k}} μknew=∑irik∑irikxi
Σknew=∑irik(xi−μknew)(xi−μknew)T∑irik \Sigma_k^{\text{new}} = \frac{\sum_i r_{i k} (x^i - \mu_k^{\text{new}})(x^i - \mu_k^{\text{new}})^T}{\sum_i r_{i k}} Σknew=∑irik∑irik(xi−μknew)(xi−μknew)T
直观理解
- E步:每个点对每个簇说"我有多大概率是你生的?"(软投票)
- M步:每个簇根据"收到的票数"重新调整自己的位置、大小、影响力
- 反复迭代,直到每个人都找到"最可能生自己的簇"
GMM vs K-means 终极对比表
| 项目 | K-means | GMM + EM |
|---|---|---|
| 分配方式 | 硬分配(0或1) | 软分配(概率r_{ik} ∈ 0,1) |
| 簇形状 | 只能球形(隐含Σ_k = σ²I) | 任意椭球(完整协方差Σ_k) |
| 簇大小/密度 | 假设差不多 | 自然不同(不同Σ_k) |
| 簇权重π_k | 强制相等(1/K) | 可学习(不同大小的簇) |
| 优化目标 | 最小化SSE(平方误差和) | 最大化对数似然 |
| 当Σ_k→0且π_k相等时 | 等价!(GMM退化成K-means) | - |
| 对噪声/离群点 | 敏感(拉偏中心) | 更鲁棒(概率小) |
极限情况下GMM = K-means
当我们强制:
- 所有Σ_k = ε²I(ε→0)
- 所有π_k = 1/K
→ r_{i k}要么≈1要么≈0 → 退化成硬分配 → 完全等价于K-means
所以可以说:"GMM是K-means的泛化"
收敛性
EM每次迭代都严格提升(或保持)对数似然ℓ(θ)ℓ(θ)ℓ(θ),所以一定会收敛(通常到局部最优)。实际跑几百步就稳了。
典型例题(手算一轮EM)
2个1维点:x¹=2, x²=8,K=2
初始:π₁=π₂=0.5, μ₁=1, μ₂=10, Σ₁=Σ₂=1(方差1)
E步(算r):
- 对x¹=2:
N(2|1,1) = 高斯密度 ≈ 0.242
N(2|10,1) ≈ 很小≈0
r_{11} ≈ 1, r_{12} ≈ 0 - 对x²=8:r_{21} ≈ 0, r_{22} ≈ 1
M步:
- π₁ = (1+0)/2 = 0.5
- μ₁ = (12 + 08)/1 = 2
- μ₂ = (02 + 18)/1 = 8
- Σ更新类似(这里方差固定)
第二次E步已经完全硬分配,收敛。
(如果初始μ₁=3, μ₂=7,第一次r就不会100%,需要多轮慢慢拉开)
总结
GMM+EM就是"概率版K-means":
- E步 ≈ K-means的分配(但软)
- M步 ≈ K-means的更新中心(但加权,还更新协方差和π)
一句话总结就是:K-means是特殊的GMM,GMM是更强的K-means。
8.4 层次聚类
**层次聚类(Hierarchical Clustering)**是"基于连接性"的聚类,不需要预设K,能生成树状结构(dendrogram),适合探索数据(如生物分类树)。相比K-means/GMM,它更"灵活",但计算慢点。重点是凝聚式(最常见)和簇间相似性定义(决定算法变体)。
层次聚类的基本想法
- 不是一次性分K个簇,而是生成嵌套的簇树(像家族树)
- 可视化为树状图(dendrogram):从叶子(单个点)到根(全数据一个簇)
- 切树的不同高度,得不同簇数(不用预设K)
优点
- 不需预设簇数K(后切树选)
- 对应有意义的分类体系(e.g., 生物门纲目科)
- 能处理任意形状(取决于相似性定义)
两种类型
- 凝聚式(Agglomerative,自底向上):从每个点一个簇开始,递归合并最近的两个簇,直到一个大簇(最流行)
- 分裂式(Divisive,自顶向下):从全数据一个簇开始,递归分裂最"不一致"的簇(e.g., 直径最大的)
凝聚式算法流程:
- 计算所有点间相似矩阵
- 每个点一个簇
- 重复:合并最近两个簇,更新矩阵
- 直到一个簇
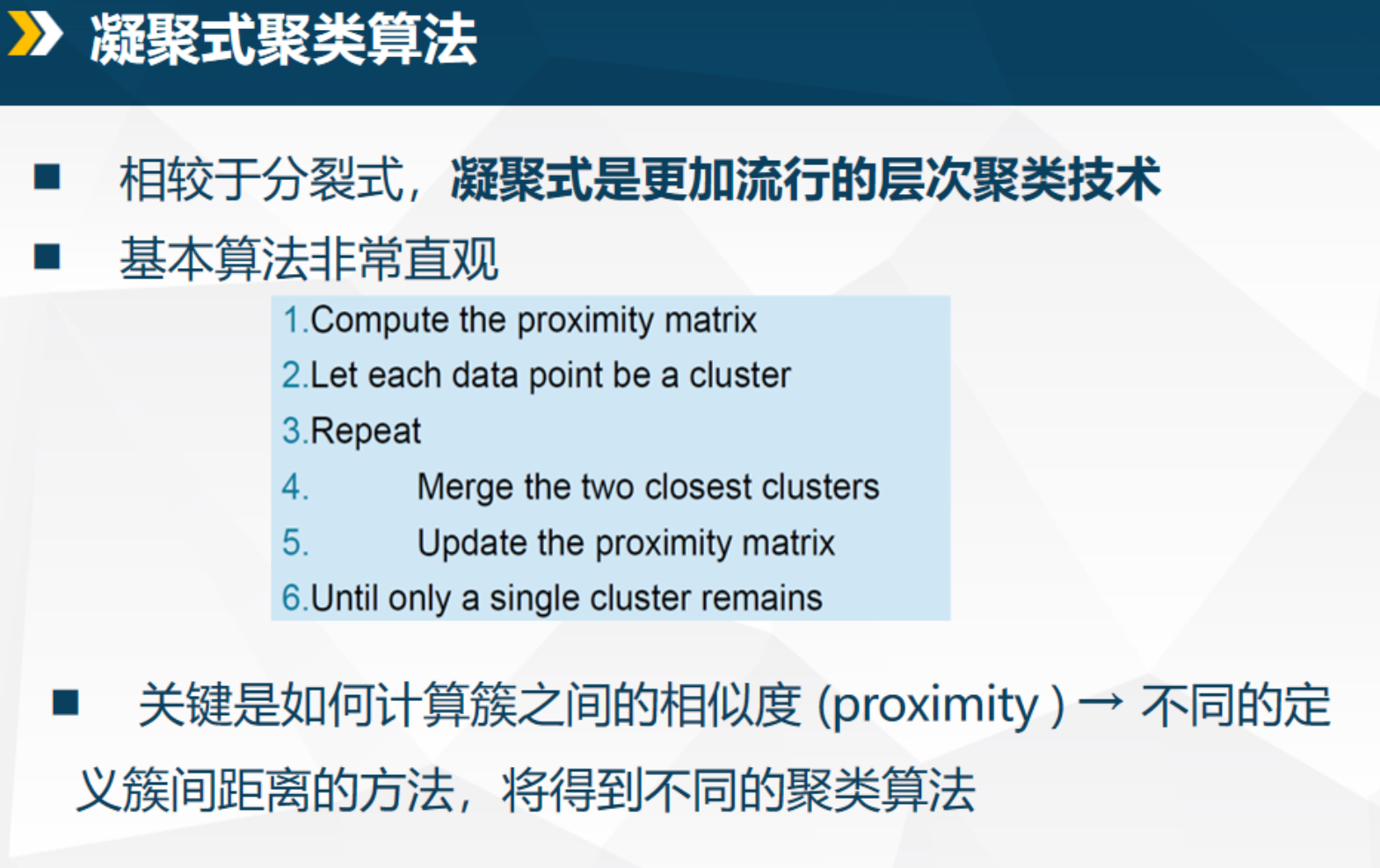
关键:如何定义/更新簇间相似性? → 不同定义生不同变体
簇间相似性定义
用dist(CkC_kCk, ClC_lCl)测两个簇"远近"。常见方法:
-
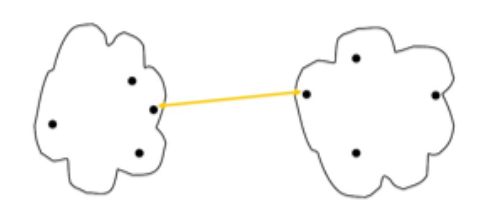
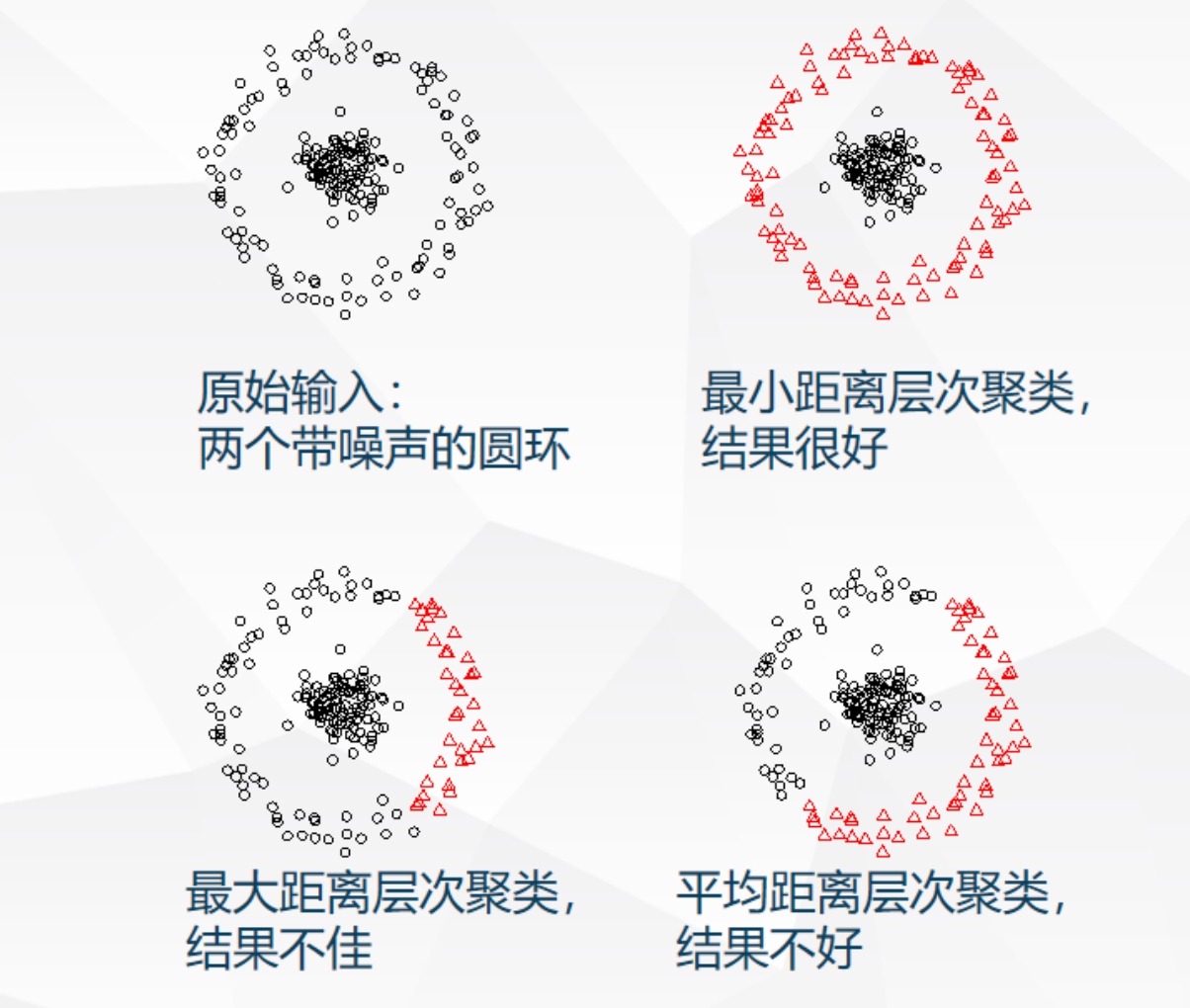
MIN(Single Link,最小距离) :dist=mini∈Ck,j∈Cldist(i,j)dist = \min_{i\in C_k, j\in C_l} dist(i,j)dist=mini∈Ck,j∈Cldist(i,j)
- 优势:任意形状、非凸簇
- 缺点:链式效应(长链连大簇)
-
MAX(Complete Link,最大距离) :dist=maxi∈Ck,j∈Cldist(i,j)dist = \max_{i\in C_k, j\in C_l} dist(i,j)dist=maxi∈Ck,j∈Cldist(i,j)
- 优势:抗噪鲁棒,不链式
- 缺点:偏球形,易拆大簇(过度聚类)
-
Group Average(平均距离) :dist=1∣Ck∣∣Cl∣∑i∈Ck,j∈Cldist(i,j)dist = \frac{1}{|C_k||C_l|} \sum_{i\in C_k, j\in C_l} dist(i,j)dist=∣Ck∣∣Cl∣1∑i∈Ck,j∈Cldist(i,j)
- 优势:MIN/MAX折中,抗噪+不过度
- 缺点:计算稍慢
-
Centroids(中心距离) :dist=dist(μk,μl)dist = dist(\mu_k, \mu_l)dist=dist(μk,μl),μ\muμ 是均值
- 优势:简单
- 缺点:反转效应(后合并距可能比前小)
-
Ward方法(平方误差) :dist=ΔSSEdist = \Delta SSEdist=ΔSSE(合并后误差增量)
- Δ=∣Ck+Cl∣∥μkl−μ∥2−∣Ck∣∥μk−μ∥2−∣Cl∣∥μl−μ∥2\Delta = |C_k + C_l| \|\mu_{kl} - \mu\|^2 - |C_k| \|\mu_k - \mu\|^2 - |C_l| \|\mu_l - \mu\|^2Δ=∣Ck+Cl∣∥μkl−μ∥2−∣Ck∣∥μk−μ∥2−∣Cl∣∥μl−μ∥2
- 优势:少噪,层次版K-means
- 缺点:偏球形
不同定义对比表
| 定义方法 | 簇形状支持 | 抗噪性 | 常见问题 | 典型场景 |
|---|---|---|---|---|
| MIN | 任意/链状 | 差 | 链式效应 | 长链数据(如社交网) |
| MAX | 球形/紧凑 | 好 | 过度拆大簇 | 噪声数据 |
| Average | 中等 | 中等 | 计算量大 | 平衡需求 |
| Centroids | 球形 | 中等 | 反转效应 | 简单均值数据 |
| Ward | 球形 | 好 | 倾向小簇 | 初始化K-means |
层次聚类的直观理解
层次聚类像"公司并购":凝聚式从小公司(点)开始,最近的合并成大集团,树记录过程。相似性定义是"并购标准"------MIN看"最近员工距离"(易链),MAX看"最远员工"(保守)。
几何:树状图如分支树,高切=少簇,低切=多簇。
物理:生物进化树,合并序反映"亲缘远近"。
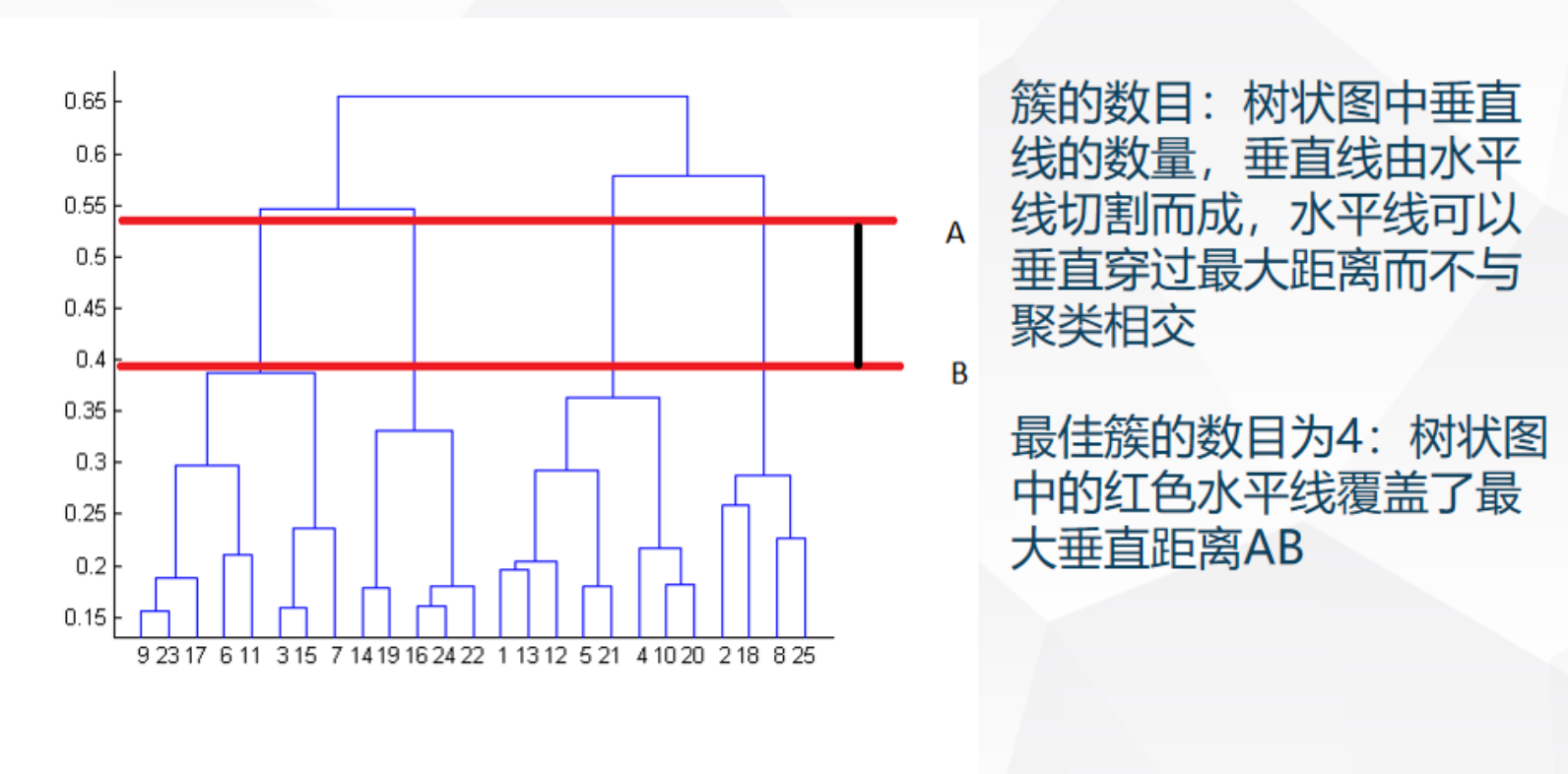
簇数确定
看树状图:切覆盖最大垂直距的水平线,垂直线数=簇数。
限制
- 贪心,不可逆(合并错没法回)
- 无全局优化(可能局部坏)
- 敏感噪/尺寸/凸形(依方法)
- 计算O(N²)慢,大数据难
典型例题:手动凝聚式聚类(用MIN定义)
5点1D数据:A1=1, A2=2, A3=4, A4=5, A5=10(直观上明显有三簇:1-2,4-5,10)
初始:每个点一簇,相似矩阵(欧氏):
- 最近:A1-A2=1, A3-A4=1
步骤1:合并A1-A2成C1, A3-A4成C2
- 更新dist(C1,C2)=min(2-4,2-5,1-4,1-5)=2(MIN)
- dist(C1,A5)=min(1-10,2-10)=8
- dist(C2,A5)=min(4-10,5-10)=5
步骤2:最近C2-A5=5,合并成C3=4,5,10
- 更新dist(C1,C3)=min(dist(C1,C2),dist(C1,A5))=2(MIN链式)
步骤3:合并C1-C3=2,全一个簇
树:先并近点,后连远,但MIN链式可能把10连早。
如果用MAX:dist(C1,C2)=max(1-5,2-4)=4,dist(C2,A5)=6 >4,先并C1-C2错(拆大簇问题)。
验证:切树高=3簇(1-2,4-5,10),匹配数据。K-means可能把4-5-10并一簇(均值拉)。
8.5 基于密度的聚类
基于密度的聚类(DBSCAN)
:基于密度的聚类 ,核心代表就是DBSCAN(Density-Based Spatial Clustering of Applications with Noise)。它是"基于密度"的典型,能处理任意形状簇、自动识别噪声、不需要预设K,在实际应用中非常实用(尤其图像分割、异常检测)。
为什么需要基于密度的方法?
K-means和GMM假设簇是"凸的/椭球的",层次聚类容易链式或过度分裂。
现实数据常有:
- 任意形状(月牙、环形、长条)
- 不同密度
- 噪声/离群点
基于密度直接解决:簇 = 高密度区域连通,低密度是噪声。
DBSCAN核心思想
- 密度 = 指定半径ε内点的个数
- 高密度区连成簇,低密度区隔开簇,孤立点是噪声
三个关键概念:
- 核心点(Core point):ε邻域内至少有MinPts个点(包括自己)
- 边界点(Border point):ε邻域内点数 < MinPts,但属于某个核心点的邻域
- 噪声点(Noise/Outlier):既不是核心也不是边界
密度关系
- 密度直达:q在p的ε邻域,且p是核心 → q由p密度直达
- 密度可达:存在路径,所有中间点都是核心 → 形成簇
- 密度相连:存在共同核心点o,使p和q都密度可达o
簇定义:最大密度相连点集(连通 + 最大性)
DBSCAN算法流程
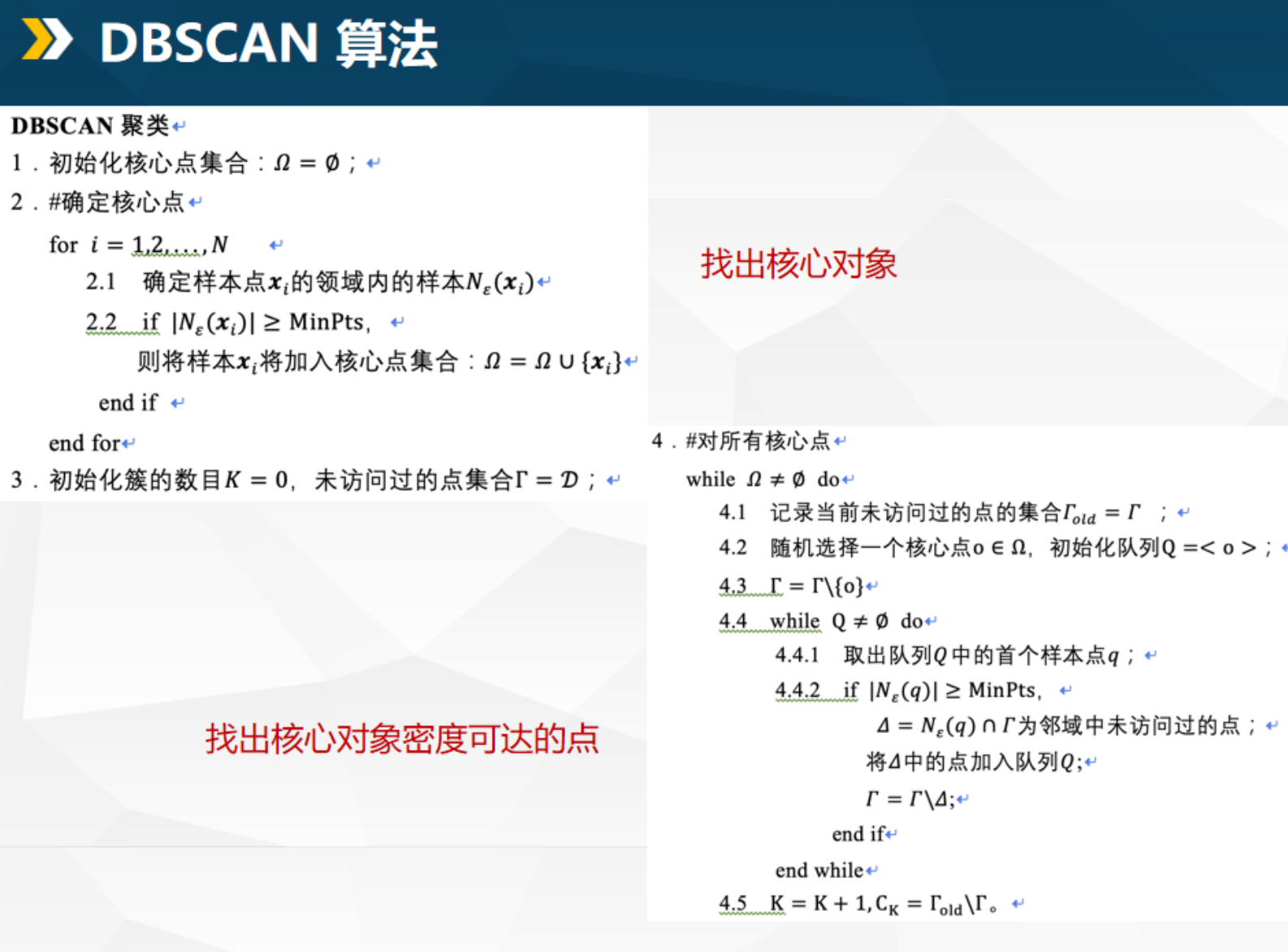
输入:数据D,ε(半径),MinPts(最小点数)
- 初始化核心点集合Ω = ∅,未访问点Γ = D
- 遍历所有点,计算每个点的ε邻域N(x^i):
- 如果 |N(x^i)| ≥ MinPts → x^i 是核心点,加入Ω
- while Ω 不为空:
- 随机选一个核心点o ∈ Ω,初始化队列Q = {o}
- 从Γ移除o
- while Q 不为空:
- 取出q ∈ Q
- 如果q是核心点:
- 找q的邻域中未访问点Δ = N(q) ∩ Γ
- 把Δ加到Q,Γ移除Δ
- 生成一个新簇C_k = 本轮访问的所有点
- K = K + 1
- 剩余Γ中的点是噪声
参数解释
- ε:邻域半径(太小→太多噪声,太大→全连成一个簇)
- MinPts:通常取维度+1或经验值(如2*dim)
优势 vs 劣势对比表
| 方面 | 优势 | 劣势 |
|---|---|---|
| 簇形状 | 任意形状(非凸、链状、环形都OK) | - |
| 簇数 | 自动确定(不用预设K) | - |
| 噪声处理 | 自动识别离群点 | - |
| 参数 | 只有ε和MinPts(相对简单) | 参数敏感(选错ε/MinPts会崩) |
| 密度差异 | 能处理均匀密度 | 密度差异太大时效果差(需预处理) |
| 时间复杂度 | O(N log N)(用KD树加速) | 最坏O(N²)(无索引时) |
如何选参数ε和MinPts?
经典方法:k-距离图(k=MinPts)
- 对每个点算到第k最近邻的距离
- 排序画图(x轴=点,y轴=距离)
- 图通常急剧上升前有个"膝盖"(elbow),膝盖处的距离 ≈ 合适ε
- MinPts经验:2*维度,或10~20(小数据集)
典型例题:手动理解DBSCAN
假设2D点(简化,ε=1.5, MinPts=3):
- 点群1:密集三角形(5点在小圈内)
- 点群2:稀疏环形(10点绕圈)
- 3个孤立噪声点
过程:
- 找核心点:群1全核心(邻域≥3),群2部分核心(环上密度够),噪声无
- 从群1核心扩展:密度直达/可达,生成簇1
- 跳到群2核心:扩展成环形簇2(密度连通绕圈)
- 剩余孤立点 → 噪声
结果:簇1(圆)、簇2(环)、噪声(3点)------K-means/GMM全失败。
注意
DBSCAN是"无假设王者":不假设形状、不假设数量、不怕噪声,但参数选错就全废。
实际用时,先画k-距离图选ε,再调MinPts。sklearn里DBSCAN直接用。
8.5 聚类小结
聚类是无监督学习的核心任务 ,高度依赖应用场景,几乎没有"万能算法"。
核心一句话:没有最好的聚类方法,只有最适合数据的聚类方法。
聚类方法的四大类型对比(回顾+总结)
| 类型 | 代表算法 | 是否需预设K | 簇形状支持 | 对噪声/离群点 | 典型应用场景 | 最大优点 | 最大缺点 |
|---|---|---|---|---|---|---|---|
| 基于中心 | K-means, K-medoids | 是 | 球形/凸 | 差 | 大规模均匀数据、初探 | 简单、快、可扩展 | 假设太强、易受初始/噪声影响 |
| 基于概率 | GMM + EM | 是 | 椭球/任意 | 中等 | 需要软分配、不同密度/大小 | 概率解释、软分配 | 计算慢、局部最优 |
| 基于连接 | 层次聚类(凝聚/分裂) | 否 | 任意 | 中等 | 探索性分析、需要树状结构 | 不需K、层次可视化 | 不可逆、计算O(N²) |
| 基于密度 | DBSCAN, OPTICS | 否 | 任意 | 强 | 噪声多、任意形状、异常检测 | 自动噪声、任意形状 | 参数敏感、密度差异大时失效 |
一句话总结
- 不知道K、想探索 → 层次聚类或DBSCAN
- 大数据、简单球形 → K-means
- 需要概率/软分配/椭球 → GMM
- 噪声多、形状怪 → DBSCAN首选
sklearn中的聚类工具
sklearn.cluter模块几乎囊括了所有主流算法,直接import就能用。常用类列表:
- KMeans / MiniBatchKMeans:大规模数据首选
- DBSCAN:密度聚类王者
- AgglomerativeClustering:层次聚类(支持Ward、complete、average等链接)
- GaussianMixture:GMM + EM(软分配)
- MeanShift:基于密度,但自动带宽
- SpectralClustering:谱聚类(高维非凸好用)
- Birch:平衡迭代缩减层次聚类(大数据友好)
使用示例
python
from sklearn.cluster import KMeans, DBSCAN, AgglomerativeClustering, GaussianMixture
# K-means 示例
kmeans = KMeans(n_clusters=3, init='k-means++', n_init=10)
labels = kmeans.fit_predict(X)
# DBSCAN(自动找噪声)
db = DBSCAN(eps=0.5, min_samples=5)
labels = db.fit_predict(X) # -1 表示噪声
# GMM 软分配
gmm = GaussianMixture(n_components=3)
gmm.fit(X)
probs = gmm.predict_proba(X) # 每个点的概率分布课件的思考题
这里给出简要的答案:
-
K均值聚类算法隐含了对簇的什么假设?
→ 球形簇、等大小、等密度、每个点硬分配(欧氏距离+均值中心)
-
K均值迭代一定会收敛吗?
→ 会 (J单调递减,有下界),但收敛到局部最优,多次运行取最好
-
K均值算法的初始化参数怎么选择?
→ k-means++(按距离平方概率选,远离已有中心)→ scikit默认
-
K均值算法的超参K怎么选择?
→ 肘部法(SSE vs K曲线拐点)、轮廓系数/CHI峰值、Gap Statistic、领域知识
-
K均值算法有什么局限性?可能用什么方法改进?
→ 局限:非球形/不同密度/噪声/硬分配
→ 改进:GMM(软+椭球)、DBSCAN(密度+任意形)、K-medoids(中位数抗噪)
-
基于GMM的EM聚类算法为什么要引入隐变量z?
→ 因为直接最大化不完整数据似然难求导,引入z后完整数据似然简单,E步猜z概率,M步更新参数
-
K均值和EM算法有什么共通之处?
→ 都是交替优化(分配↔更新中心),E步≈K-means分配,M步≈更新均值(GMM极限退化成K-means)
-
如何度量簇的相似性?不同度量方法的优缺点?
→ 见上表:MIN(任意形但链式)、MAX(抗噪但偏球)、Average(平衡)、Ward(层次K-means)
-
层次聚类的限制有哪些?
→ 贪心不可逆、无全局优化、对噪/尺寸/凸敏感、计算慢