永磁同步电机(PMSM)基于高阶滑模观测器(HSMO)的无位置传感器速度控制仿真。
在电机控制领域,永磁同步电机(PMSM)因其高效、高功率密度等优点,广泛应用于工业生产、电动汽车等众多场景。而无位置传感器技术,更是为PMSM的应用增添了一抹亮色,它去除了昂贵且易损坏的位置传感器,降低成本的同时提高了系统可靠性。其中,基于高阶滑模观测器(HSMO)的无位置传感器速度控制方法,凭借其对系统不确定性和外部干扰的强鲁棒性,备受关注。今天,咱们就来深入聊聊这背后的仿真实现。
永磁同步电机基本原理
PMSM的运行基于磁场相互作用。简单来说,定子绕组通入三相交流电后会产生旋转磁场,这个磁场与转子永磁体磁场相互作用,从而产生电磁转矩驱动转子旋转。其在同步旋转坐标系下的数学模型主要包括电压方程、磁链方程和转矩方程。以电压方程为例,在dq坐标系下:
matlab
% 定义电机参数
R = 0.8; % 定子电阻
Ld = 0.0085; % d轴电感
Lq = 0.0085; % q轴电感
psi_f = 0.175; % 永磁体磁链
p = 4; % 极对数
% 电压方程
% v_d = R * i_d + p * omega * Lq * i_q + d(psi_d)/dt
% v_q = R * i_q - p * omega * Ld * i_d - p * omega * psi_f + d(psi_q)/dt这里vd**和v q分别是d轴和q轴电压,id**和i q是对应的电流,omega是电角速度,p为极对数。磁链方程与转矩方程类似,它们共同构建了PMSM运行的数学基础。
高阶滑模观测器(HSMO)
滑模控制的核心思想是通过设计滑模面,使系统状态在滑模面上滑动并最终稳定到平衡点。高阶滑模观测器则在传统滑模基础上,利用更高阶的信息来削弱抖振,提高观测精度。
假设我们要观测电机的电流和转子位置,以电流观测为例,定义滑模面:
matlab
% 定义滑模面
s = i_hat - i; % i_hat是电流估计值,i是实际电流然后设计滑模控制律,让系统状态向滑模面运动。在高阶滑模中,我们可以采用超螺旋算法来实现,下面是简单的超螺旋算法结构代码示意(这里只是原理性伪代码,实际需结合具体仿真环境完善):
python
alpha = 100
lambda = 10
z = 0
def super_twisting(s):
global z
if s > 0:
u = -alpha * np.sqrt(np.abs(s)) - lambda * np.sign(s)
else:
u = -alpha * np.sqrt(np.abs(s)) + lambda * np.sign(s)
z = z + s
return u这里通过调整alpha和lambda等参数,可以有效改善滑模控制效果,让观测器更加稳定准确地跟踪实际值。
无位置传感器速度控制仿真实现
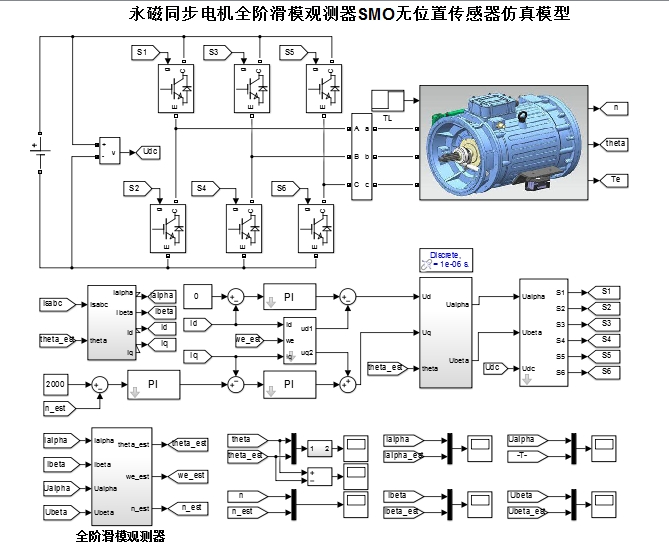
在MATLAB/Simulink环境中搭建仿真模型。首先构建PMSM模块,将前面提到的电机参数输入其中,实现电机的基本运行模拟。然后搭建基于高阶滑模观测器的位置和速度观测模块,将观测到的位置和速度反馈到速度控制环。
永磁同步电机(PMSM)基于高阶滑模观测器(HSMO)的无位置传感器速度控制仿真。
在速度控制环中,通常采用PI控制器来调节电机转速,使其跟踪给定转速。代码示例(MATLAB实现简单PI控制):
matlab
kp = 0.5;
ki = 0.1;
error = omega_ref - omega_hat; % omega_ref是给定转速,omega_hat是观测转速
integral = integral + error;
u = kp * error + ki * integral;通过不断调整kp和ki参数,使系统达到较好的动态和稳态性能。
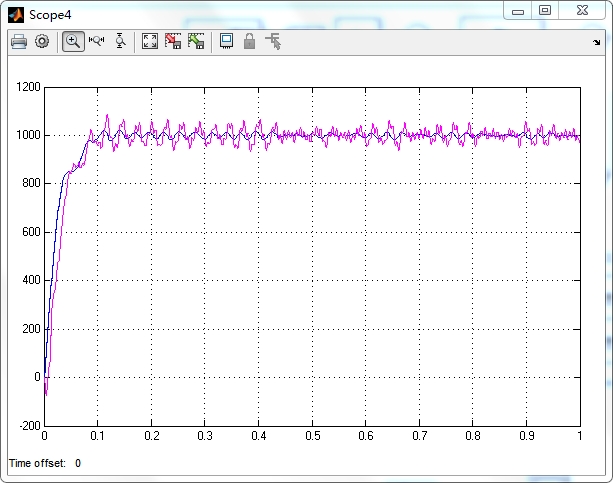
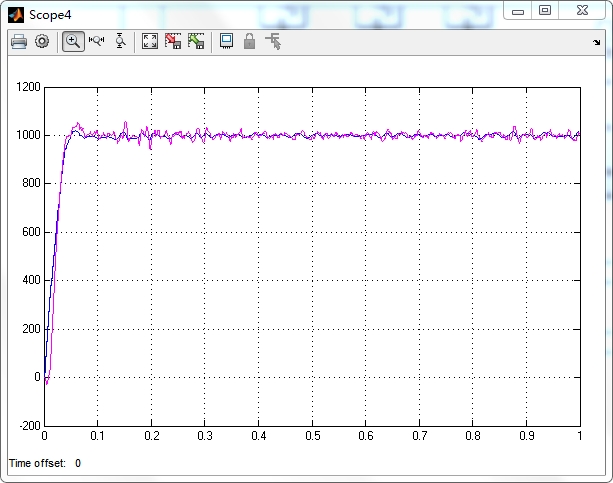
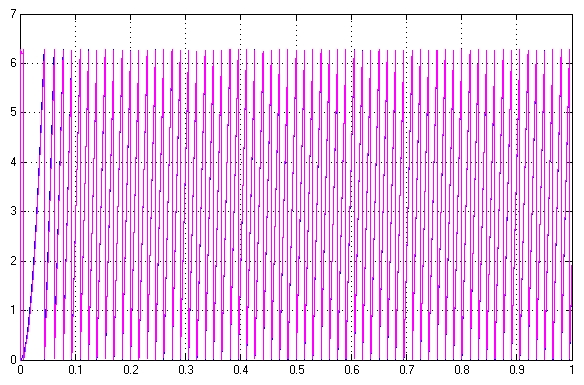
将这些模块合理连接起来,运行仿真,我们就能观察到基于高阶滑模观测器的无位置传感器速度控制系统的运行情况。从仿真结果中可以分析系统在不同工况下的转速响应、电流变化以及观测精度等。比如在启动阶段,观察转速能否快速跟踪给定值;在负载突变时,看系统的抗干扰能力如何。
通过对永磁同步电机基于高阶滑模观测器的无位置传感器速度控制仿真研究,我们不仅深入理解了该系统的运行机制,也通过实际的代码实现和仿真验证,为其在实际工程中的应用奠定了基础。希望这篇博文能为对该领域感兴趣的朋友带来一些启发和帮助。