1.前言
首先申明一下我的硬件信息
机器人:C4-A601S
控制器:RC700
PLC:西门子S7-1200(CPU:1217C/DC/DC/DC)
2.控制器IP地址查看及修改
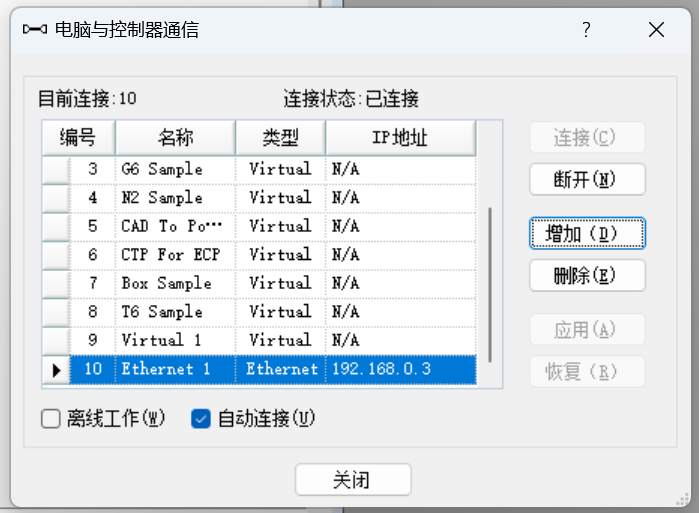
在配置控制器相关信息时需要先用网线连接PC与机器人控制器连接,爱普生机器人出厂设定网址为192.168.0.1(我这里是之前修改过了)
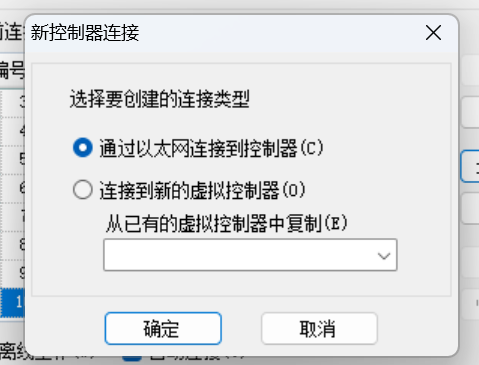
若默认没有显示以太网连接,点击右侧的增加,选择"通过以太网连接到控制器"后点击确定
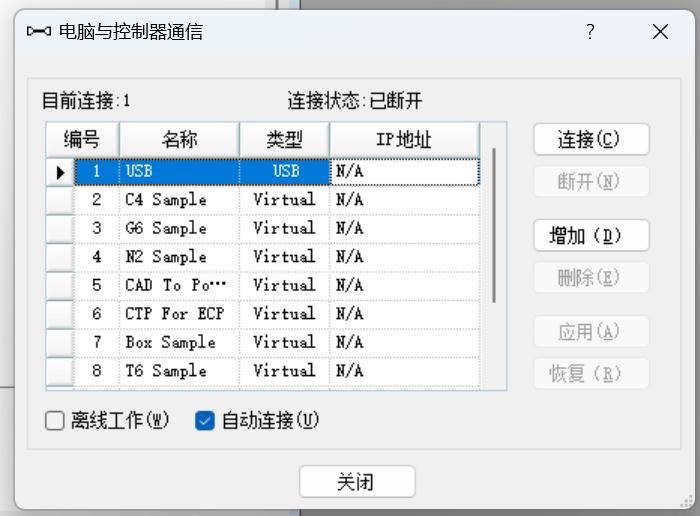
如果控制器网址被修改过了,不知道是多少,可以用一根PC线,一头接在控制器的"开发用PC连接专用USB端口"另一头接在电脑USB口

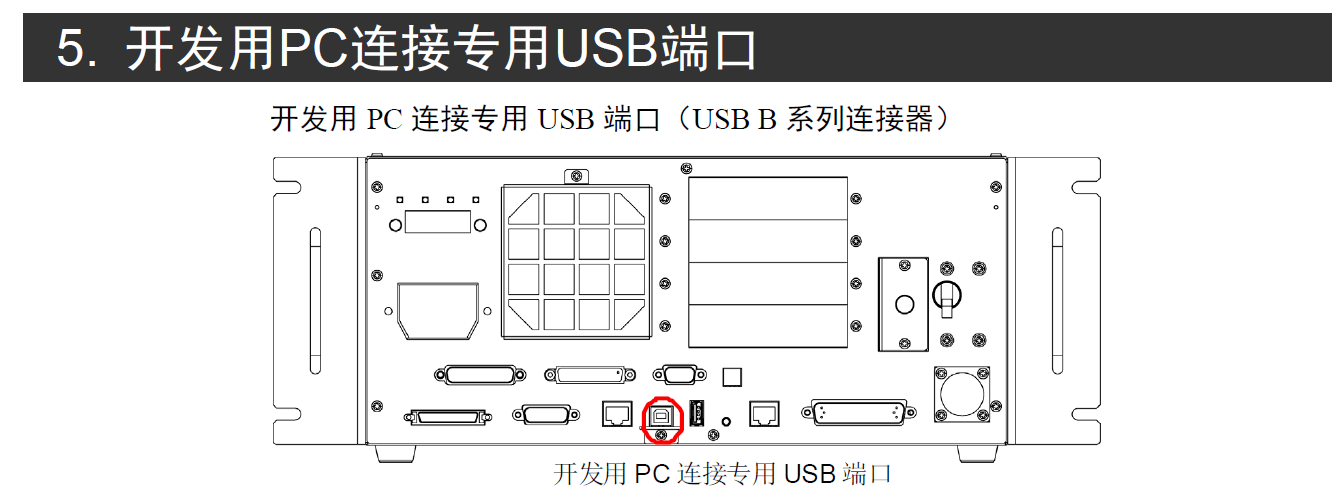
这时候再在通讯处选择USB连接就可以通上了
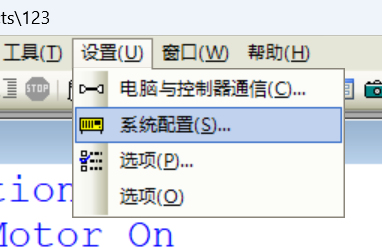
现在就可以在"系统配置"处看到控制器的IP地址以及相关信息了,如果有需要也可以直接在这修改IP地址。

3.机器人控制器配置
网线连接好后开始配置通讯相关信息
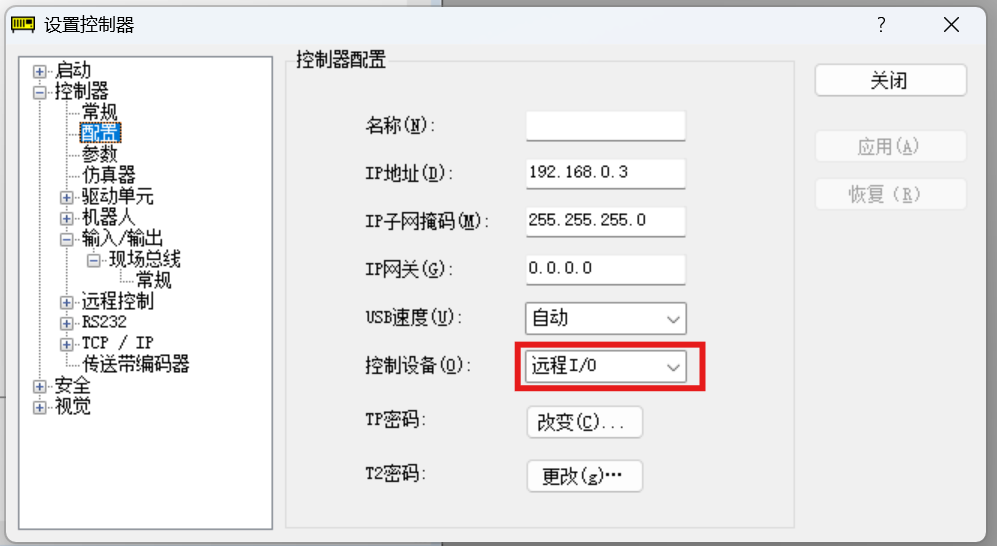
1.控制设备
控制设备修改为远程I/O
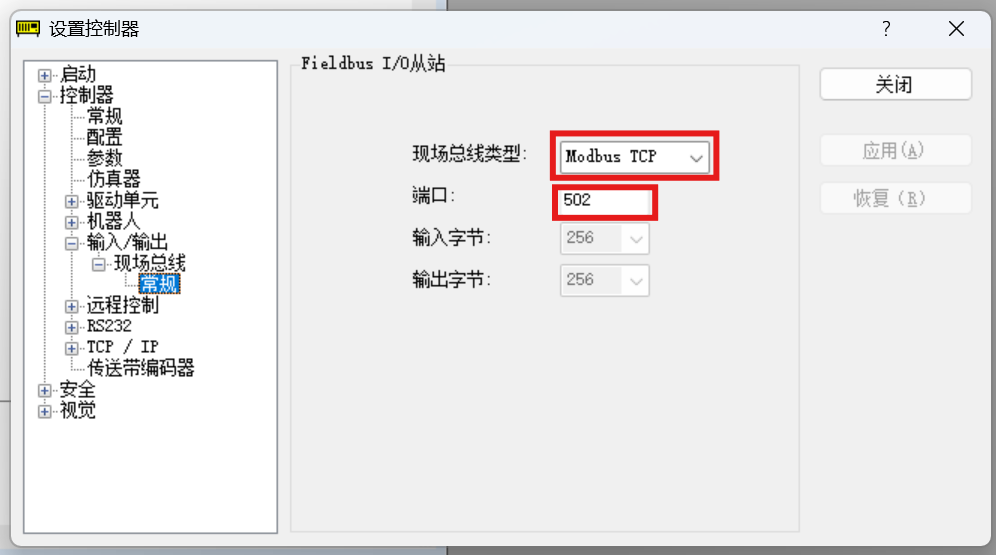
2.现场总线
现场总线类型修改为"Modbus TCP"
端口号记住PLC配置时要用到,也可以视情况进行修改
3.修改线圈地址
在远程控制➡输入/输出处,对应信号的线圈进行修改,修改为512~2559的任意一个值
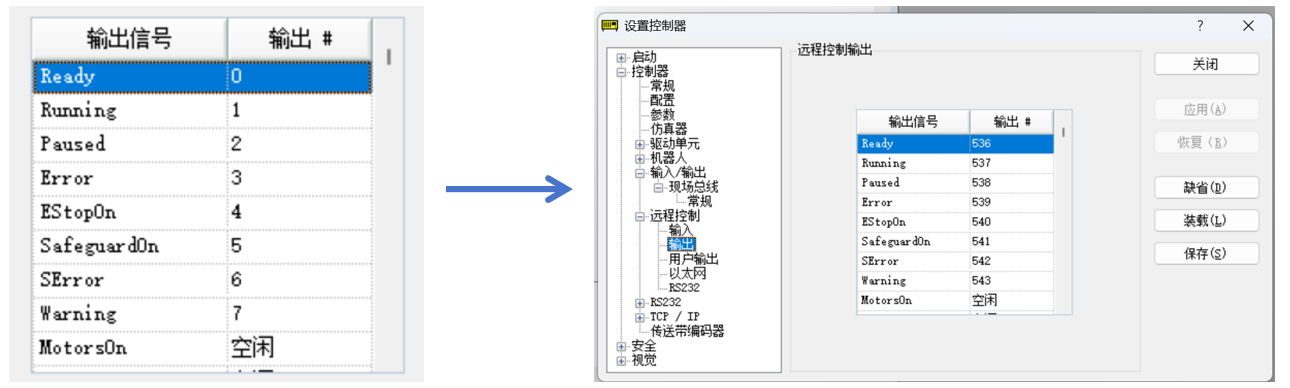
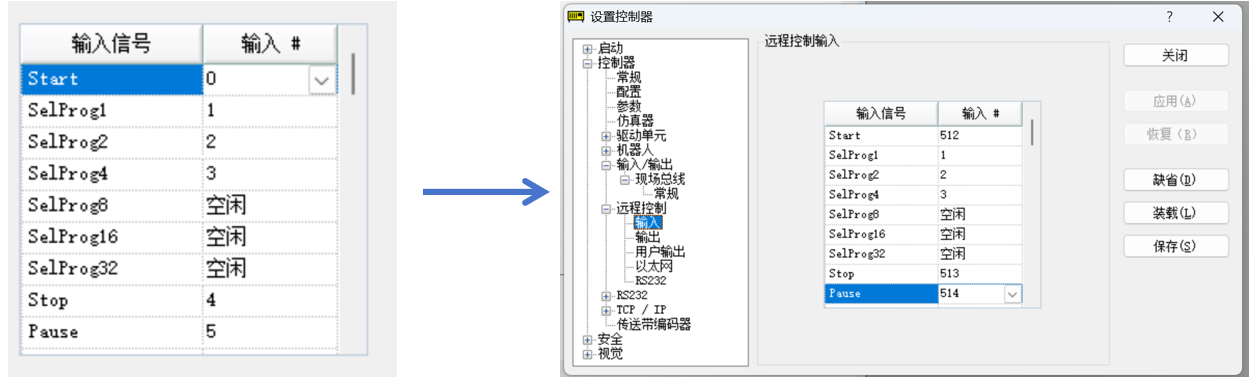
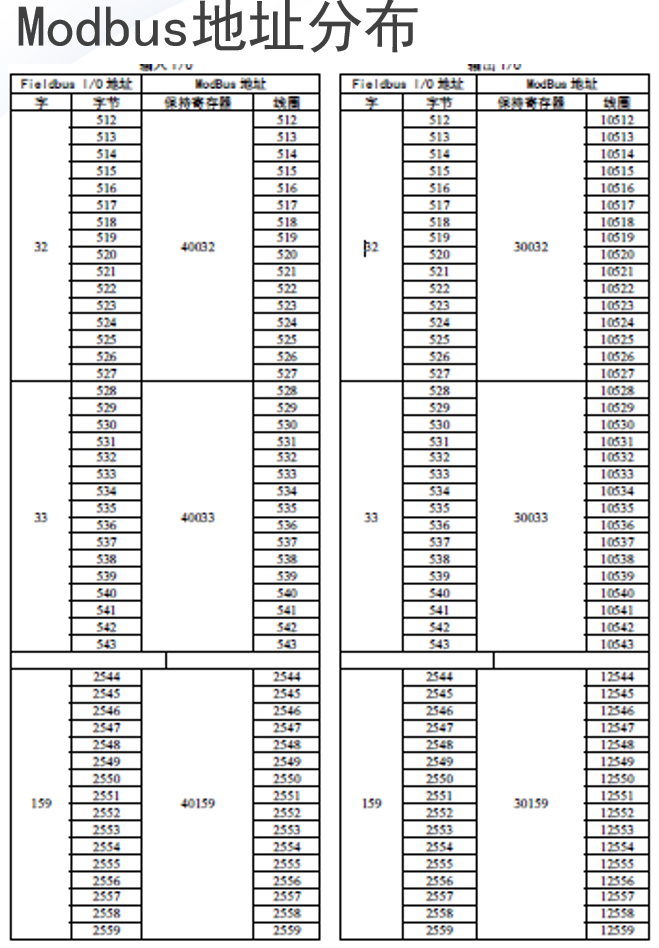
修改信号线圈是因为爱普生机器人的MODBUS地址分布,保持性寄存器对应的线圈是从512开始的
如果还是使用原线圈,就无法通过Modbus通讯进行这些信号控制
不用全部信号都修改,根据实际情况修改即可,若是只需要机器人运行,停止(不需要暂停、继续、复位),那么就只需要修改Start、Stop的对应线圈即可。
4.控制器重启
参数都修改好后点击"应用"并关闭"设备控制器",控制器会进行重启
重启好后再点开"设备控制器"看看参数是否都修改成功
4.PLC配置
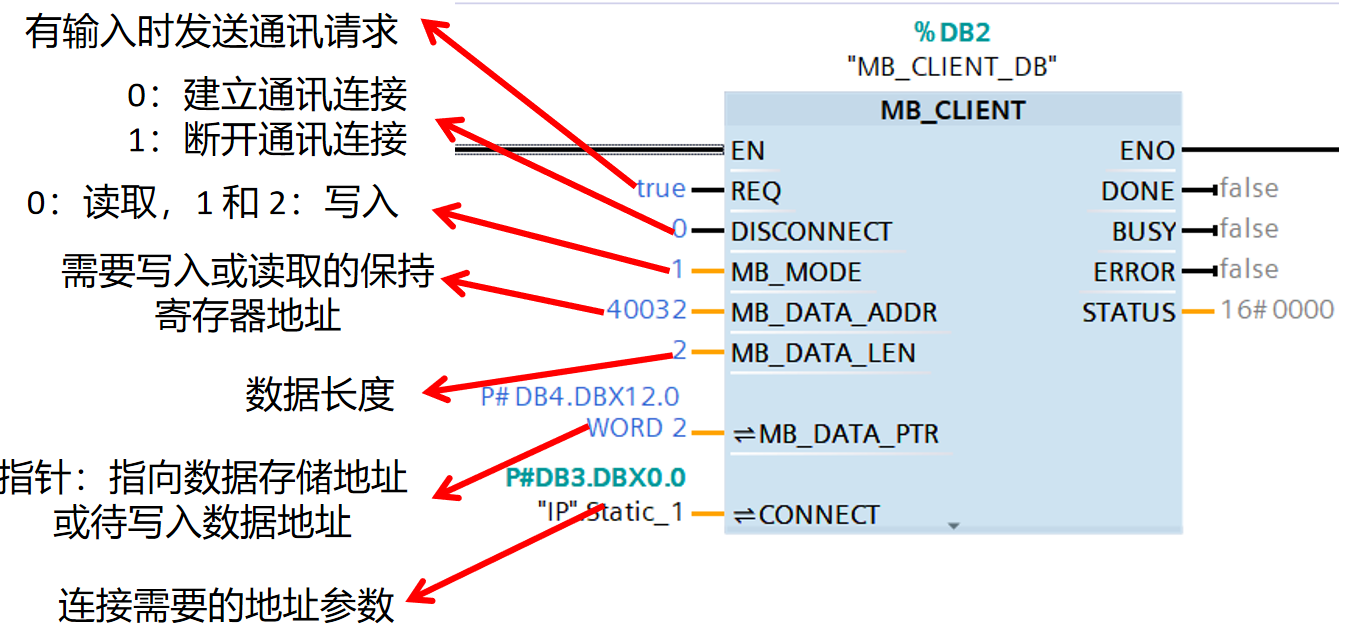
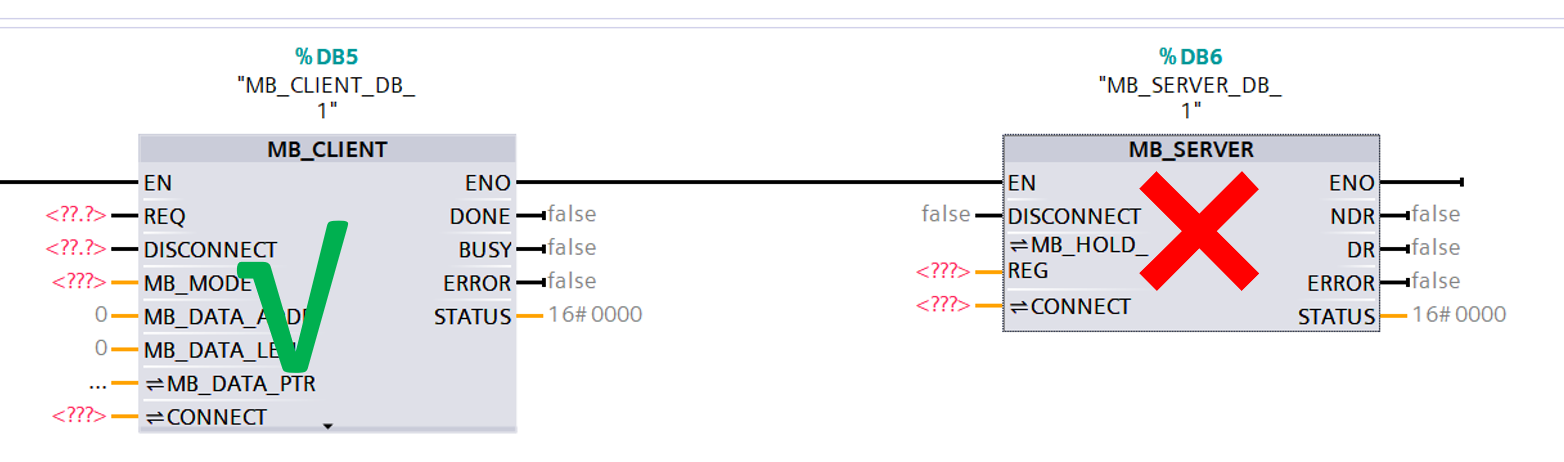
1.MB_CLIENT
因为是由PLC作为主站,所以选用MB_CLIENT指令
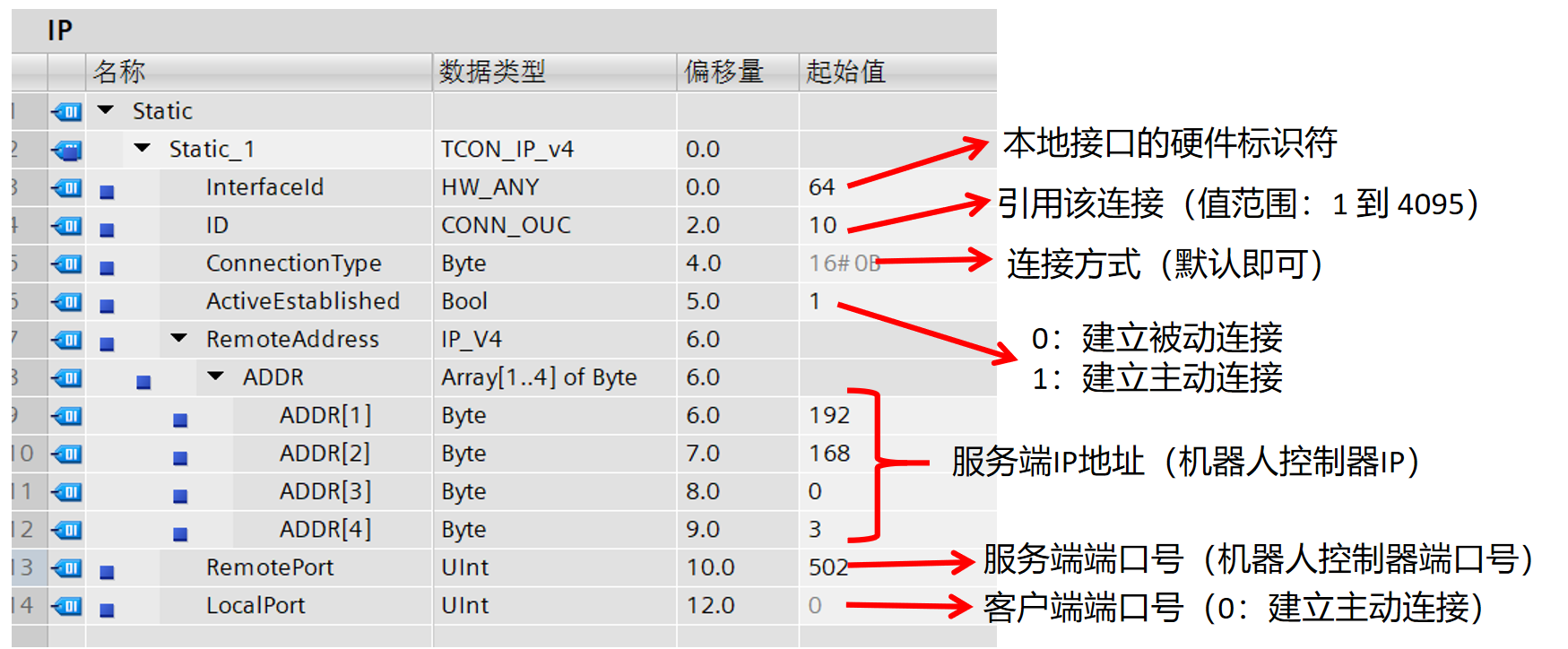
2.TCON_IP_V4
建立一个TCON_IP_V4数据用于设置连接所需要的地址参数
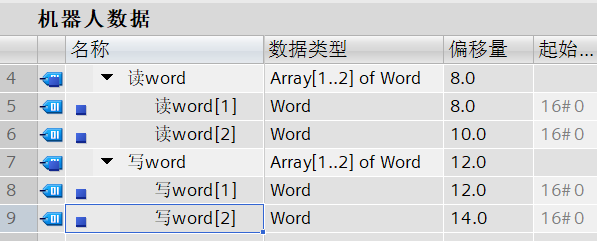
3.读写数据
还需要新建word用于存储数据或是写入数据(指针指向的地址),根据实际情况增加或减少word个数
5.通讯测试
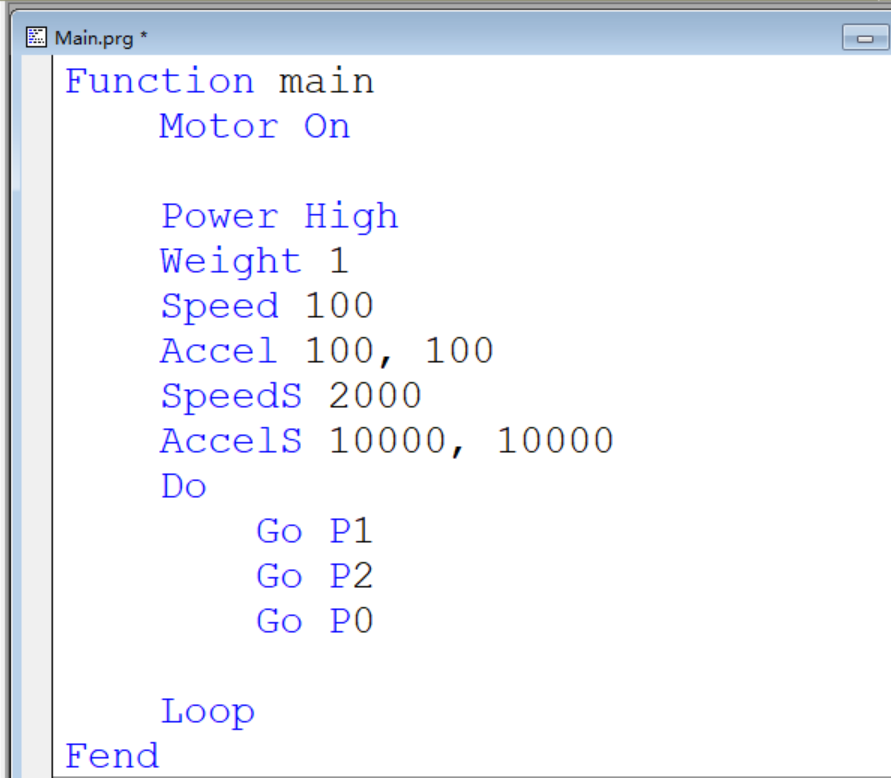
PLC与机器人都配置好后就可以进行通讯测试了
随便写一个程序写入,方便观察机器人运行状态
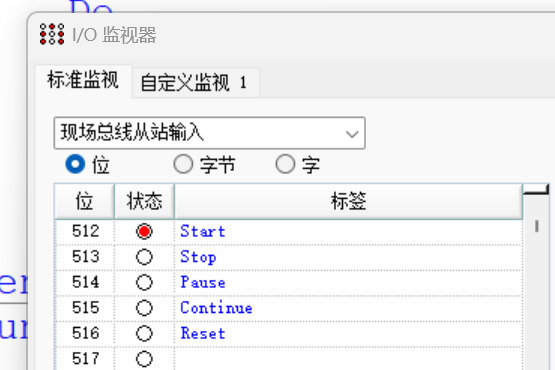
打开爱普生的"I/O监视器",将监视的信号类型修改为现场总线从站输入/输出,方便实时观察信号线圈的通断情况

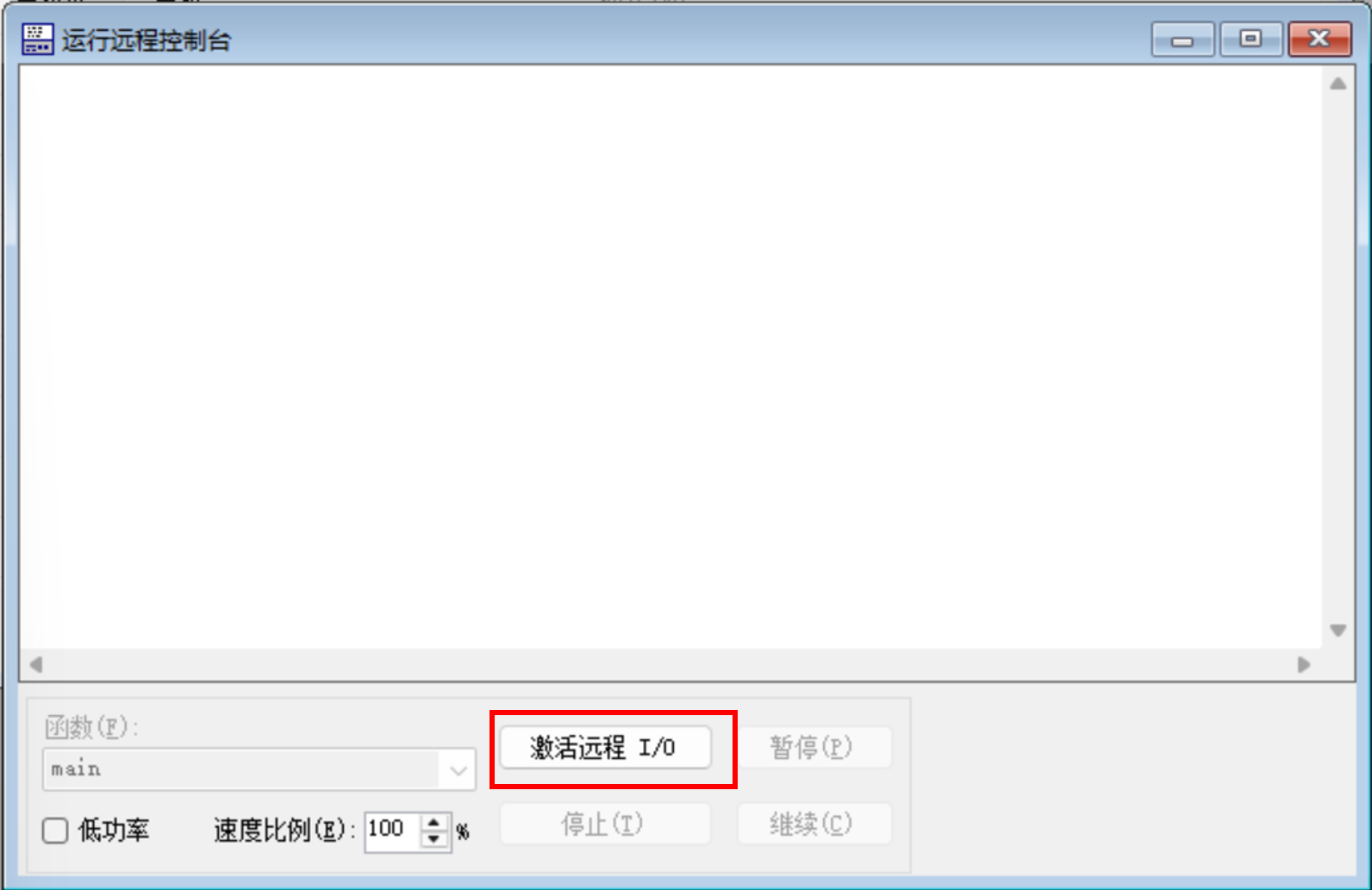
打开"运行控制台"并激活远程I/O
修改word值后写入,由于之前将start的线圈修改为512,stop线圈修改为513

所以写入1时,机器人512线圈得电,机器人启动
写入2时,机器人513线圈得电,机器人停止

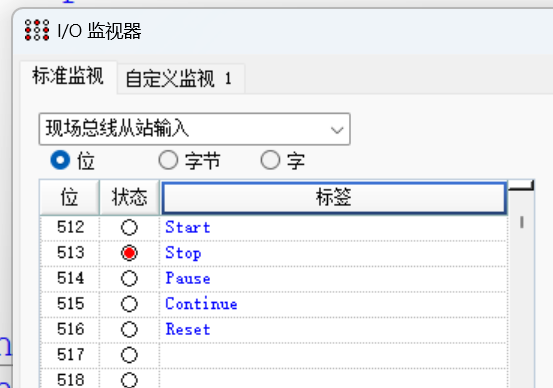
能在I/O监视器看到写入的信号状态,就通讯成功了
6.注意事项
不要用错通讯指令了,爱普生默认不支持作为 Modbus TCP 主站,仅支持作为Modbus TCP 从站(Server)与外部设备(如 PLC、上位机)通讯。
若业务需要机器人主动读取外部设备数据(主站功能),可通过以下方式实现:
- 方案 1:使用 TCP Socket 编程 :通过 RC + 的
SetNet/OpenNet/Input/Print等指令,自定义 TCP 通讯逻辑,让机器人主动建立连接并读取外部设备数据(需外部设备支持 TCP Server 模式); - 方案 2:借助中间设备:通过 PLC 作为中转(PLC 同时作为 Modbus TCP 主站 + TCP Client),机器人与 PLC 通过 TCP 通讯获取数据。