目录
[二. 创建库](#二. 创建库)
一.定义
- 动态链接库 (Dynamic Link Library 或者 Dynamic-link Library,缩写为 DLL):是微软公司在微软Windows操作系统中,实现共享函数库概念的一种方式。程序运行时 由系统动态加载动态库到内存,供程序调用,系统只加载一次,多个程序共用,节省内存。这些库函数的扩展名是 ".dll"、".ocx"(包含ActiveX控制的库)或者 ".drv"(旧式的系统驱动程序)。
- 静态链接库 : 在程序编译时 被连接到目标代码中参与编译;链接时 将库 完整地拷贝 至可执行文件中,被多次使用就有多份冗余拷贝;生成可执行程序之后,静态链接库不需要(因已将函数拷贝到可执行文件中)。通常为.lib文件,格式如:#pragma comment(lib,"XXX.lib")。
本贴的目标是将自己写的库封装为以".lib"结尾的静态链接库文件,并调用实现功能。
二. 创建库
1.创建标准工程
这里以STM32F103HAL库为例演示。首先创建一个标准HAL库工程:
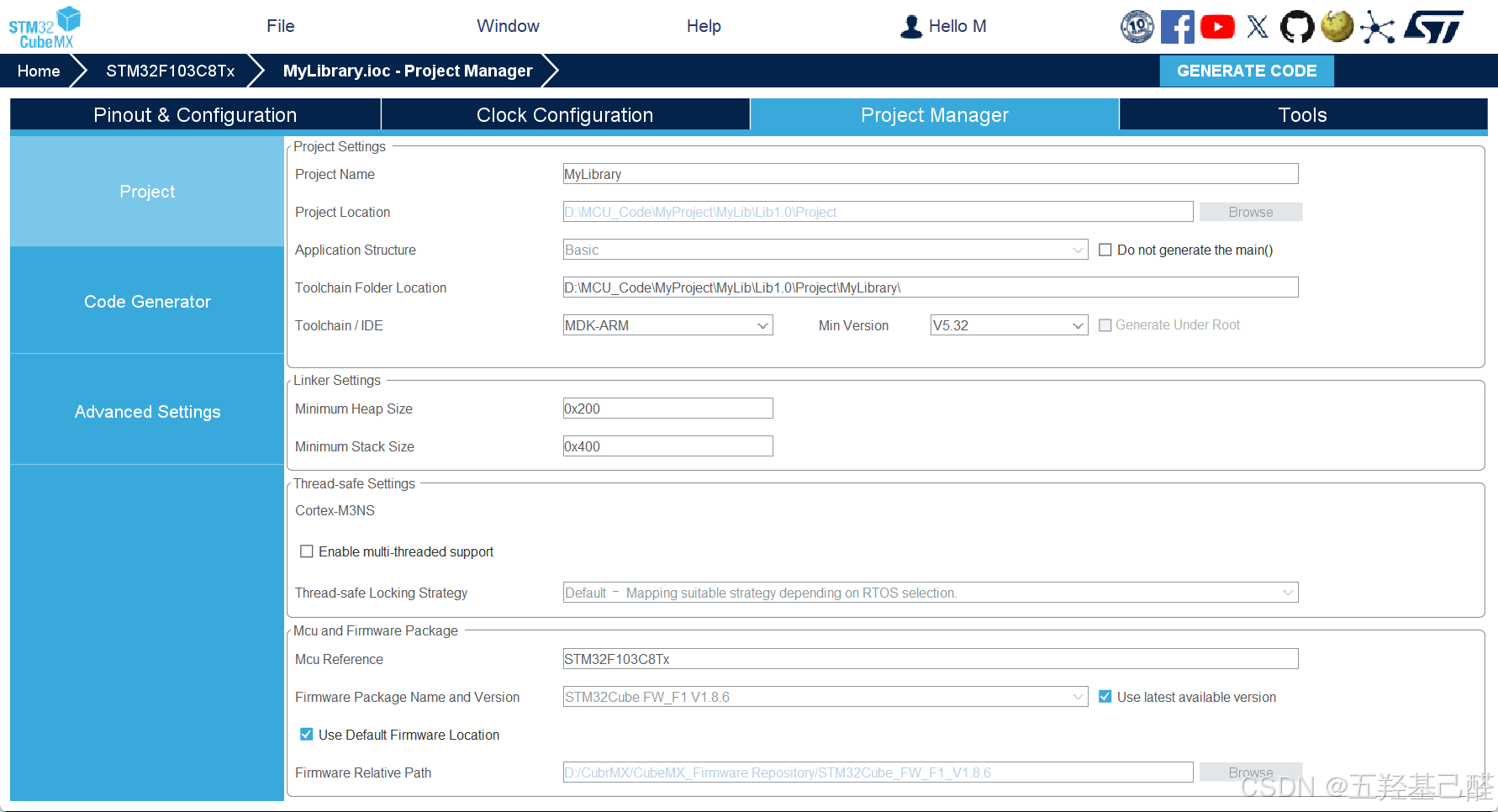
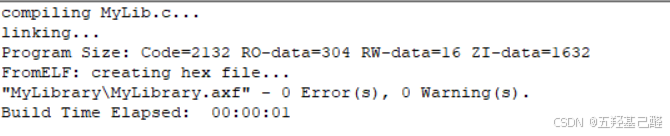
创建完要确保工程编译无错误:
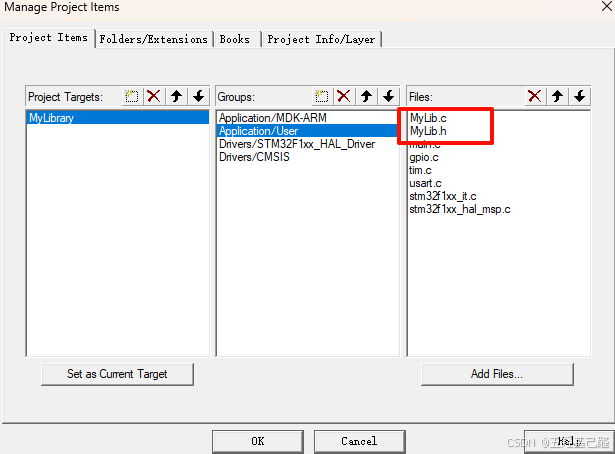
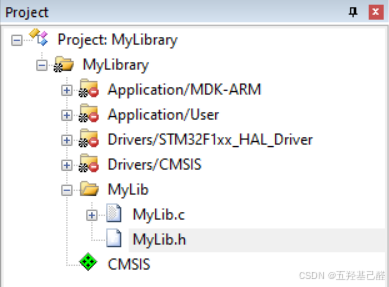
2.添加文件
添加个人库文件,楼主这里取名MyLib
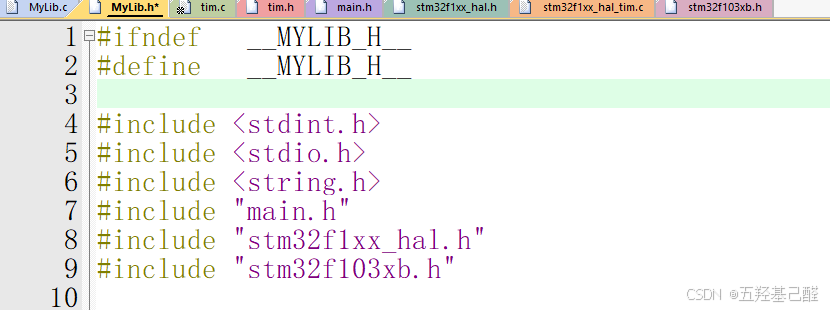
搭建好环境并添加相应头文件
3.编写库函数
由于我们最后会封装为一个.lib结尾的高度集成的库函数文件,因此我们必须将能隐藏的变量隐藏,同时要对留出的外部API尽可能地增强其自由度,即尽可能地让用户能够通过包,暴露地接口进行更加灵活地配置调用。
封装PID函数
首先我们先以封装PID函数为例,在.h文件中封装结构体
cpp
/**
* @description: 1.先定义AmplitudeLimiter类型的限幅器
2.再定义PID_Parameter的PID参数结构体(P、I、D及限幅器)
3.调用函数计算
*/
typedef struct
{
uint16_t Integration_Max;//积分限幅
uint16_t Output_Max;//输出限幅
}AmplitudeLimiter;
typedef struct
{
AmplitudeLimiter Limter;//限幅器
float Kp;
float Ki;
float Kd;
float Error;//误差
float Error_Last;//上次误差
float Error_Last_Last;//上上次误差
float Error_Integration;//误差积分
float Output;//输出
}PID_Parameter;
void PID_SetParameter(float Kp,float Ki,float Kd,AmplitudeLimiter Limtiter,PID_Parameter *PIDPr);
float PID_Position(float ActualValue,float TargetValue,PID_Parameter *PIDPr);//位置式
float PID_Incremental(float ActualValue, float TargetValue, PID_Parameter *PIDPr);//增量式在.c文件中添加位置式PID以及增量式PID计算函数,初始化函数传入P,I,D参数及限幅器即可。
cpp
void PID_SetParameter(float Kp,float Ki,float Kd,AmplitudeLimiter Limtiter,PID_Parameter *PIDPr)
{
PIDPr->Kp = Kp;
PIDPr->Ki = Ki;
PIDPr->Kd = Kd;
PIDPr->Limter = Limtiter;
}
float PID_Position(float ActualValue,float TargetValue,PID_Parameter *PIDPr)
{
PIDPr->Error_Last = PIDPr->Error;
PIDPr->Error = TargetValue - ActualValue;
PIDPr->Error_Integration += PIDPr->Error;
if(PIDPr->Error_Integration > PIDPr->Limter.Integration_Max)PIDPr->Error_Integration = PIDPr->Limter.Integration_Max;
if(PIDPr->Error_Integration < -PIDPr->Limter.Integration_Max)PIDPr->Error_Integration = -PIDPr->Limter.Integration_Max;
PIDPr->Output = PIDPr->Kp * PIDPr->Error +PIDPr->Kd * (PIDPr->Error - PIDPr->Error_Last)+PIDPr->Ki * PIDPr->Error_Integration;
if(PIDPr->Output > PIDPr->Limter.Output_Max)PIDPr->Output = PIDPr->Limter.Output_Max;
if(PIDPr->Output < -PIDPr->Limter.Output_Max)PIDPr->Output = -PIDPr->Limter.Output_Max;
return PIDPr->Output;
}
float PID_Incremental(float ActualValue, float TargetValue, PID_Parameter *PIDPr)
{
PIDPr->Error = TargetValue - ActualValue;
// 计算比例项
float P_Output = PIDPr->Kp * (PIDPr->Error - PIDPr->Error_Last);
// 计算微分项,注意防止微分kick(可选)
float D_Output = PIDPr->Kd * (PIDPr->Error - 2*PIDPr->Error_Last + PIDPr->Error_Last_Last);
//积分项
float I_Output = PIDPr->Ki * PIDPr->Error;
// 总输出为各部分之和
float Output_Increment = P_Output + D_Output + I_Output;
// 输出限幅
PIDPr->Output += Output_Increment; // 这里是增量累加到输出上
if(PIDPr->Output > PIDPr->Limter.Output_Max) PIDPr->Output = PIDPr->Limter.Output_Max;
if(PIDPr->Output < -PIDPr->Limter.Output_Max) PIDPr->Output = -PIDPr->Limter.Output_Max;
// 更新上次误差值
PIDPr->Error_Last_Last = PIDPr->Error_Last;
PIDPr->Error_Last = PIDPr->Error;
return PIDPr->Output;
}封装PWM电机驱动
这里要满足足够自由及个性化的配置,就必须连带着官方类型,比如定时器类型和定时器通道类型进行封装。笔者这里将定时器通道重新封装为一个枚举,用来在功能函数中选择通道;然后将左右轮定时器号,各自通道,电机驱动端口,驱动GPIO引脚全部打包为一个结构体WheelType。
cpp
/**
* @description: 1.先定义WheelType类型的轮子
2.调用函数驱动轮电机
*/
/*****************************Motor*****************************/
typedef enum TIMCHANNEL
{
Channel1 = 1,
Channel2,
Channel3,
Channel4
}TIMChannel;
typedef struct WHEELTYPE
{
TIM_TypeDef* LeftWheel_TIM,*RightWheel_TIM;
TIMChannel LeftWheel_Channel,RightWheel_Channel;
GPIO_TypeDef *LeftWheel_Port,*RightWheel_Port;
uint16_t LeftWheel_A_Pin,LeftWheel_B_Pin;
uint16_t RightWheel_A_Pin,RightWheel_B_Pin;
}WheelType;
void Motor_SetSpeed(WheelType Wheel,int32_t LeftSpeed,int32_t RightSpeed);
/*************************************************************/.c文件函数定义如下
cpp
/*****************************Motor*****************************/
void Motor_SetSpeed(WheelType Wheel,int32_t LeftSpeed,int32_t RightSpeed)
{
if(LeftSpeed > 0)
{
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_A_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_B_Pin,GPIO_PIN_RESET);
switch(Wheel.LeftWheel_Channel)
{
case Channel1:
Wheel.LeftWheel_TIM->CCR1 = LeftSpeed;
break;
case Channel2:
Wheel.LeftWheel_TIM->CCR2 = LeftSpeed;
break;
case Channel3:
Wheel.LeftWheel_TIM->CCR3 = LeftSpeed;
break;
case Channel4:
Wheel.LeftWheel_TIM->CCR4 = LeftSpeed;
break;
default:
break;
}
}
else if(LeftSpeed < 0)
{
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_A_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_B_Pin,GPIO_PIN_SET);
switch(Wheel.LeftWheel_Channel)
{
case Channel1:
Wheel.LeftWheel_TIM->CCR1 = -LeftSpeed;
break;
case Channel2:
Wheel.LeftWheel_TIM->CCR2 = -LeftSpeed;
break;
case Channel3:
Wheel.LeftWheel_TIM->CCR3 = -LeftSpeed;
break;
case Channel4:
Wheel.LeftWheel_TIM->CCR4 = -LeftSpeed;
break;
default:
break;
}
}
else
{
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_A_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(Wheel.LeftWheel_Port,Wheel.LeftWheel_B_Pin,GPIO_PIN_SET);
}
if(RightSpeed > 0)
{
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_A_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_B_Pin,GPIO_PIN_RESET);
switch(Wheel.RightWheel_Channel)
{
case Channel1:
Wheel.RightWheel_TIM->CCR1 = RightSpeed;
break;
case Channel2:
Wheel.RightWheel_TIM->CCR2 = RightSpeed;
break;
case Channel3:
Wheel.RightWheel_TIM->CCR3 = RightSpeed;
break;
case Channel4:
Wheel.RightWheel_TIM->CCR4 = RightSpeed;
break;
default:
break;
}
}
else if(RightSpeed < 0)
{
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_A_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_B_Pin,GPIO_PIN_SET);
switch(Wheel.RightWheel_Channel)
{
case Channel1:
Wheel.RightWheel_TIM->CCR1 = -RightSpeed;
break;
case Channel2:
Wheel.RightWheel_TIM->CCR2 = -RightSpeed;
break;
case Channel3:
Wheel.RightWheel_TIM->CCR3 = -RightSpeed;
break;
case Channel4:
Wheel.RightWheel_TIM->CCR4 = -RightSpeed;
break;
default:
break;
}
}
else
{
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_A_Pin,GPIO_PIN_SET);
HAL_GPIO_WritePin(Wheel.RightWheel_Port,Wheel.RightWheel_B_Pin,GPIO_PIN_SET);
}
}
/*************************************************************/- 封装OLED显示驱动
.h文件声明如下
cpp
/**
* @description: 1.先调用OLED_Init函数初始化
2.调用功能函数显示
*/
/*****************************OLED_EN*****************************/
void OLED_WR_CMD(uint8_t cmd);
void OLED_WR_DATA(uint8_t data);
void OLED_Init(I2C_HandleTypeDef* hi2cx);
void OLED_Clear(void);
void OLED_Display_On(void);
void OLED_Display_Off(void);
void OLED_Set_Pos(uint8_t x, uint8_t y);
void OLED_On(void);
void OLED_ShowNum(uint8_t x,uint8_t y,unsigned int num,uint8_t len,uint8_t size2,uint8_t Color_Turn);
void OLED_Showdecimal(uint8_t x,uint8_t y,float num,uint8_t z_len,uint8_t f_len,uint8_t size2, uint8_t Color_Turn);
void OLED_ShowChar(uint8_t x,uint8_t y,uint8_t chr,uint8_t Char_Size,uint8_t Color_Turn);
void OLED_ShowString(uint8_t x,uint8_t y,char*chr,uint8_t Char_Size,uint8_t Color_Turn);
void OLED_ShowCHinese(uint8_t x,uint8_t y,uint8_t no,uint8_t Color_Turn);
void OLED_DrawBMP(uint8_t x0, uint8_t y0, uint8_t x1, uint8_t y1, uint8_t * BMP,uint8_t Color_Turn);
void OLED_HorizontalShift(uint8_t direction);
void OLED_Some_HorizontalShift(uint8_t direction,uint8_t start,uint8_t end);
void OLED_VerticalAndHorizontalShift(uint8_t direction);
void OLED_DisplayMode(uint8_t mode);
void OLED_IntensityControl(uint8_t intensity);
/*************************************************************/.c文件部分代码如下,与江科大OLED代码一致,剩余部分可以复制江科大的代码
cpp
/*****************************OLED_EN*****************************/
I2C_HandleTypeDef* hi2c;
uint8_t CMD_Data[]={
0xAE, 0xD5, 0x80, 0xA8, 0x3F, 0xD3, 0x00, 0x40,0xA1, 0xC8, 0xDA,
0x12, 0x81, 0xCF, 0xD9, 0xF1, 0xDB, 0x40, 0xA4, 0xA6,0x8D, 0x14,
0xAF};
/**
* @function: void OLED_Init(void)
* @description: OLED初始化
* @return {*}
*/
void OLED_Init(I2C_HandleTypeDef* hi2cx)
{
HAL_Delay(200);
hi2c = hi2cx;
uint8_t i = 0;
for(i=0; i<23; i++)
{
OLED_WR_CMD(CMD_Data[i]);
}
}
/**
* @function: void OLED_WR_CMD(uint8_t cmd)
* @description: 向设备写控制命令
* @param {uint8_t} cmd 芯片手册规定的命令
* @return {*}
*/
void OLED_WR_CMD(uint8_t cmd)
{
HAL_I2C_Mem_Write(hi2c ,0x78,0x00,I2C_MEMADD_SIZE_8BIT,&cmd,1,0x100);
}
/**
* @function: void OLED_WR_DATA(uint8_t data)
* @description: 向设备写控制数据
* @param {uint8_t} data 数据
* @return {*}
*/
void OLED_WR_DATA(uint8_t data)
{
HAL_I2C_Mem_Write(hi2c ,0x78,0x40,I2C_MEMADD_SIZE_8BIT,&data,1,0x100);
}4.编译生成库文件
首先我们需要确保源代码0error,0warning
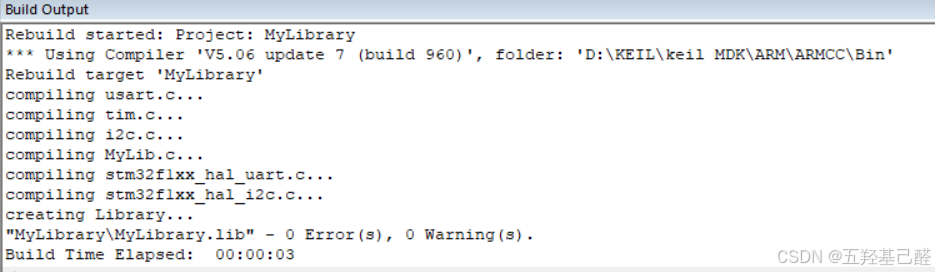
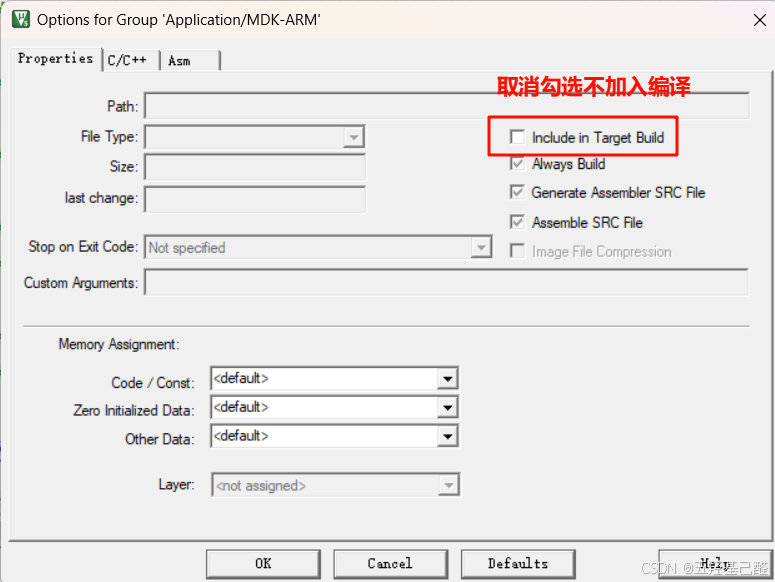
接着把库文件单独放在一个组内,其他文件夹屏蔽不编译以节省空间
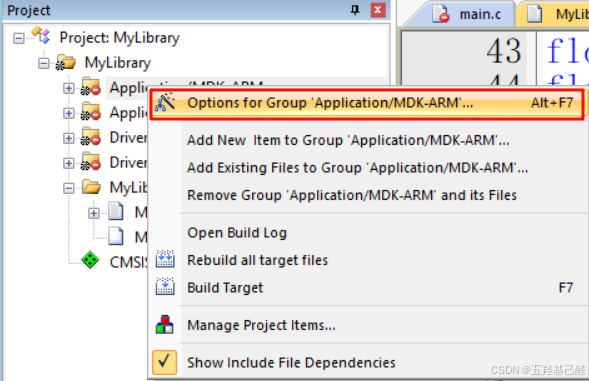
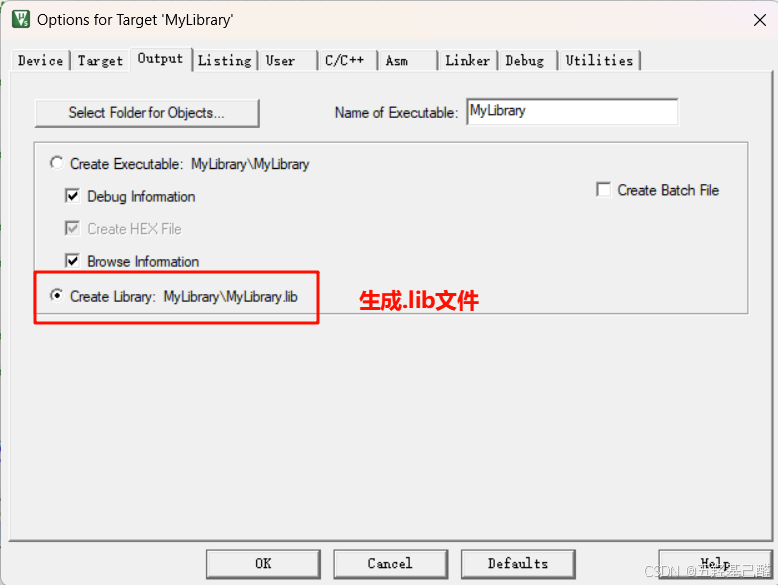
打开魔术棒,勾选生成.lib文件
重新编译
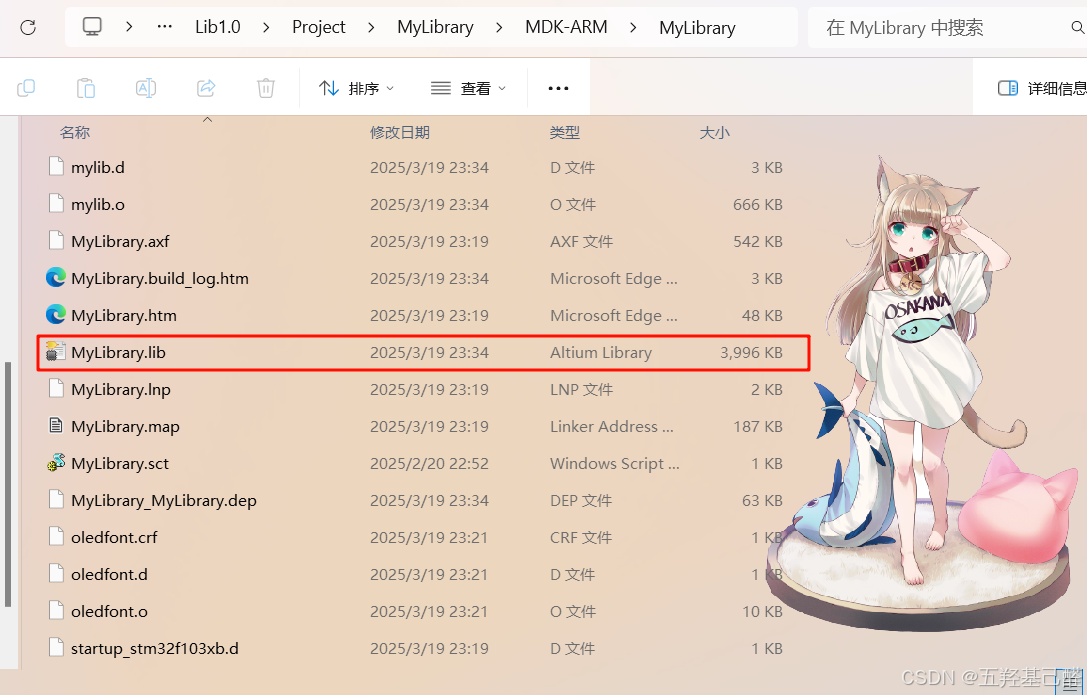
在目标文件夹找到生成的.lib文件即可
三.将库导入其他工程
将上述.lib文件夹复制出来添加到其他需要用到的工程中
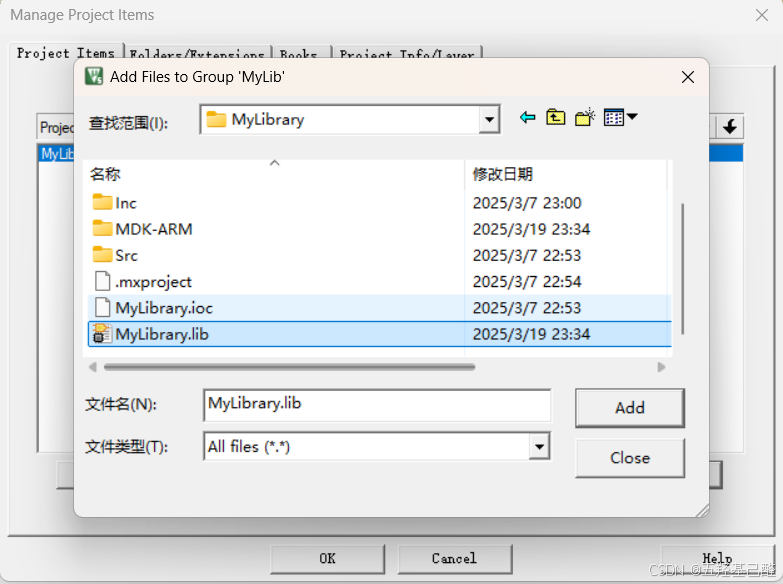

接着调用其中封装好的函数即可。
注意:引入此文件后不需要#include任何文件,每次调用函数之前需要额外声明一遍。
四.测试
以上代码均未经过验证,仅存在于笔者理论阶段,待时间宽裕,笔者会对其正确性进行验证,读者若有时间可自己先做验证。
----2025.3.7