在部分 Cortex-M3 / M4 MCU 中,如果需要从 Flash 或 RAM 启动,通常需要通过 地址重映射(memory remap),将 Flash 或 RAM 映射到 地址 0x00000000,以满足内核对中断向量表取址的要求。
而 STM32F7 系列 MCU 不需要进行地址映射,可以指定起始地址。
启动源由BOOT引脚决定
STM32F7系列MCU通过BOOT引脚与启动地址选项字节(BOOT_ADD0/BOOT_ADD1)共同决定启动方式,支持两种启动模式:
| 启动模式选择 | BOOT | 启动地址选项字节 | 启动区域 |
|---|---|---|---|
| 模式 0 | 0 | BOOT_ADD015:0 | 由用户在 BOOT_ADD015:0 中定义的启动地址,ST 默认值:ITCM-Flash,0x0020 0000 |
| 模式 1 | 1 | BOOT_ADD115:0 | 由用户在 BOOT_ADD115:0 中定义的启动地址,ST 默认值:系统 Bootloader,0x0010 0000 |
- BOOT_ADD0 / BOOT_ADD1 允许用户灵活配置启动地址,支持 Flash、RAM 以及 System Memory
- 在实际产品中,通常配置为:
- BOOT = 0 → 从 Flash 启动用户应用
- BOOT = 1 → 进入系统 Bootloader,用于固件升级或恢复
从Flash启动流程
中断向量表
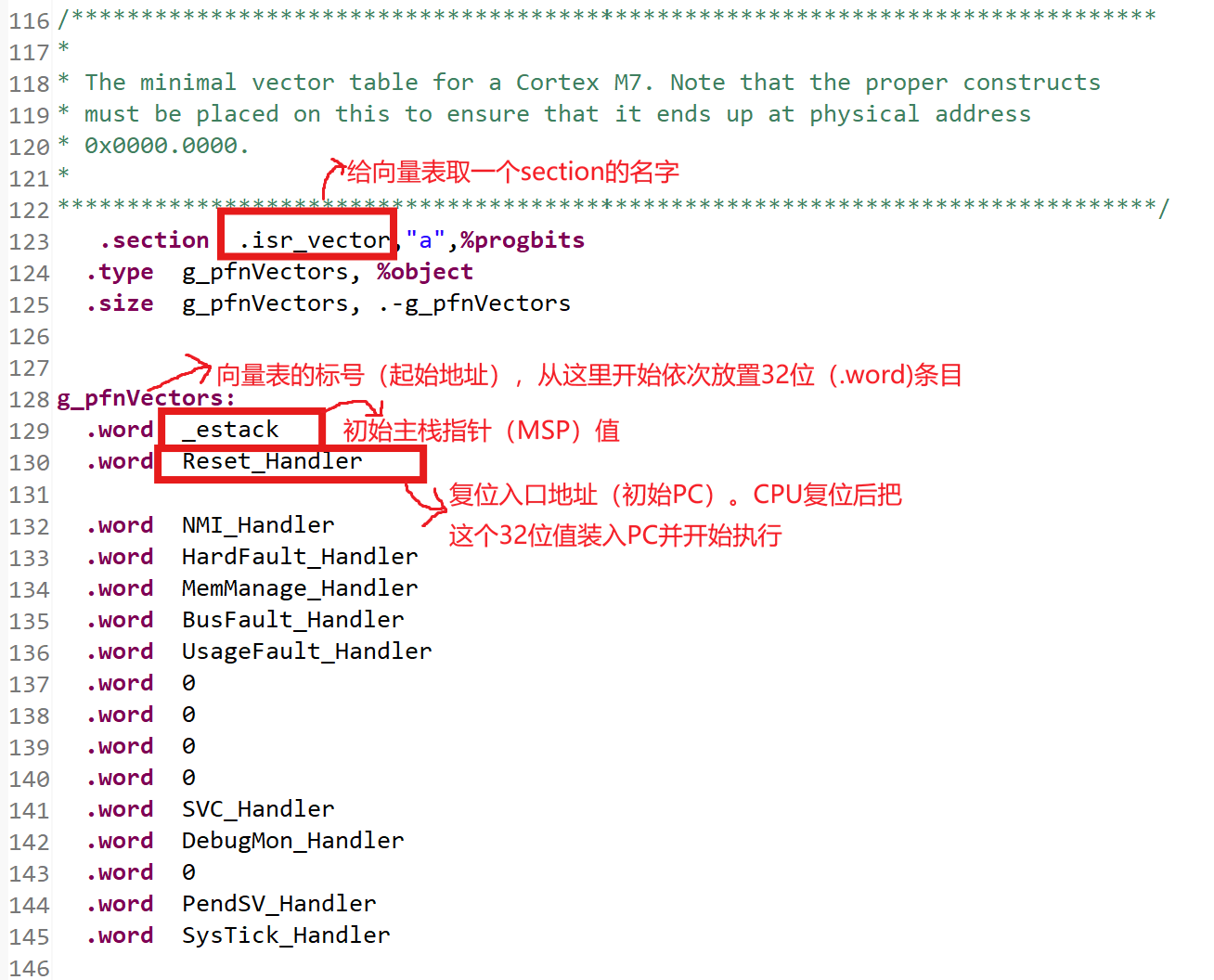
这是 Cortex-M 的中断/异常向量表(vector table),用来告诉处理器启动时的初始栈指针和各异常/中断的入口地址。
中断向量表如何放入Flash
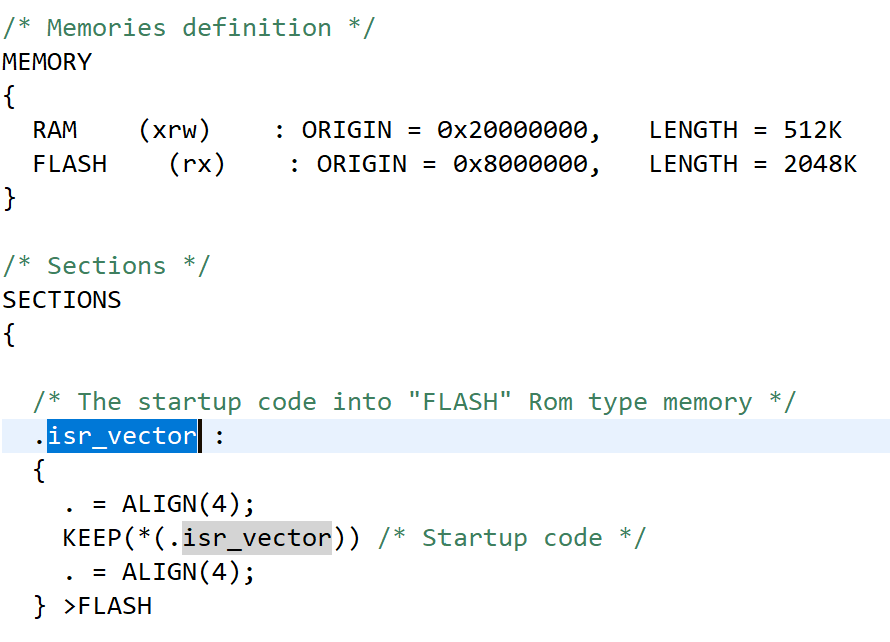
在链接脚本 FLASH.ld 中,通过如下方式指定:
- .isr_vector 段被放置在 Flash 起始地址
- flash 默认起始地址为 0x08000000
因此,中断向量表最终就位于 0x08000000, 当系统配置为 从 Flash 启动 时, 这是系统上电后 CPU 默认取指的位置。
上电后的执行过程
- 读取Flash起始地址的第一个32位值,作为初始栈指针,写入SP寄存器
- 读取第二个32位值,作为Reset_Handler地址,写入PC程序寄存器
- 从Reset_Handler开始执行程序
Reset_Handler代码解析
Reset_Handler:
ldr sp, =_estack /* set stack pointer */
/* Call the clock system initialization function.*/
bl SystemInit
/* Copy the data segment initializers from flash to SRAM */
ldr r0, =_sdata
ldr r1, =_edata
ldr r2, =_sidata
movs r3, #0
b LoopCopyDataInit
CopyDataInit:
ldr r4, [r2, r3]
str r4, [r0, r3]
adds r3, r3, #4
LoopCopyDataInit:
adds r4, r0, r3
cmp r4, r1
bcc CopyDataInit
/* Zero fill the bss segment. */
ldr r2, =_sbss
ldr r4, =_ebss
movs r3, #0
b LoopFillZerobss
FillZerobss:
str r3, [r2]
adds r2, r2, #4
LoopFillZerobss:
cmp r2, r4
bcc FillZerobss
/* Call static constructors */
bl __libc_init_array
/* Call the application's entry point.*/
bl main
bx lr
.size Reset_Handler, .-Reset_Handler这段代码可以总结为六个关键步骤:
- 设置栈指针(上电的时候硬件已经做过一次,这里可以忽略)
- 调用SystemInit,配置系统时钟等
- 初始化.data段: FPU、向量表地址等基础环境
- 清零 .bss 段:未初始化的全局 / 静态变量全部置零
- 初始化 C 运行库: 准备C/C++运行环境
- 进入 main():应用程序正式开始运行