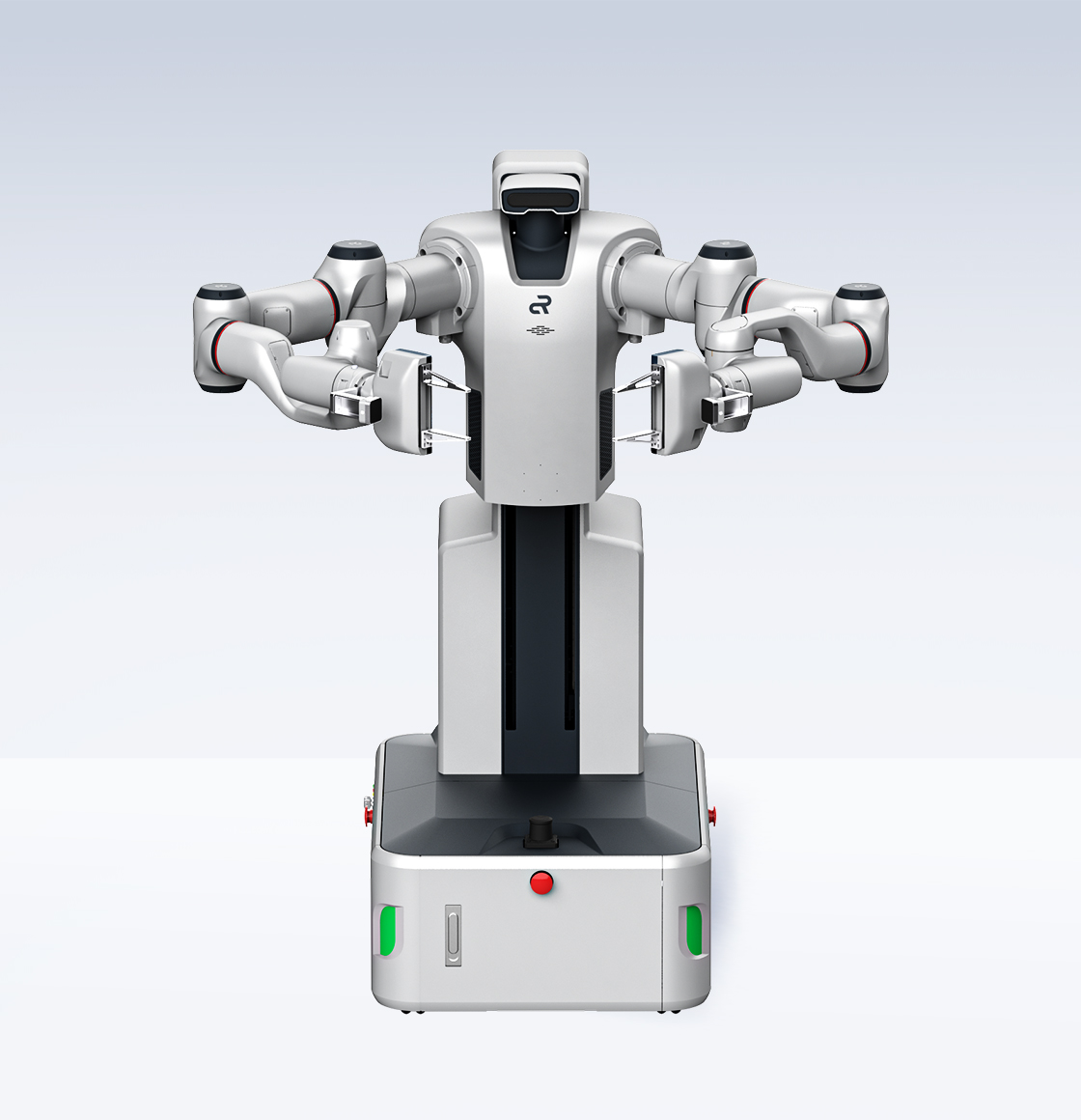
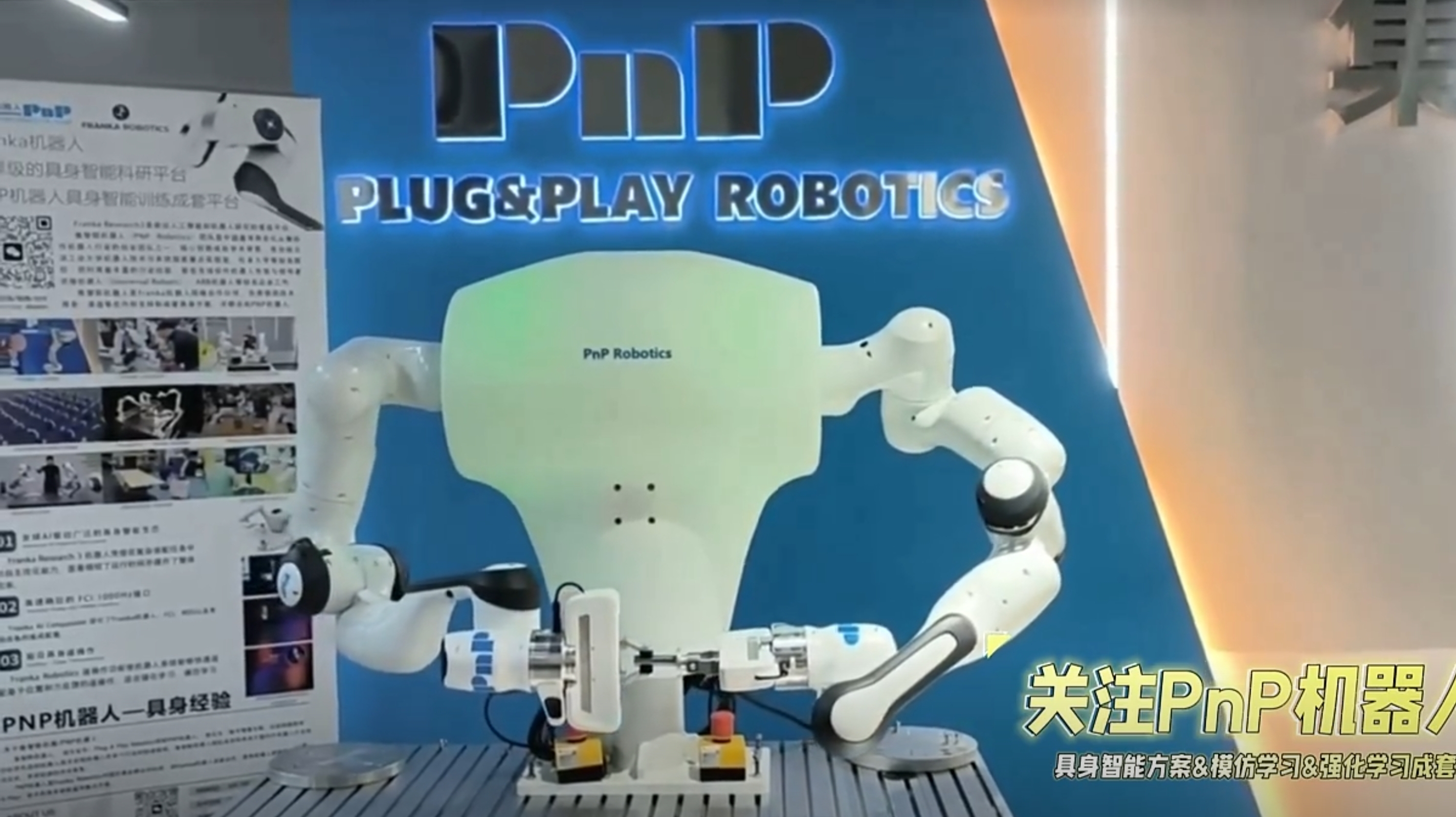
1月15日上海嘉定,在2026人形机器人与具身智能产业大会上,PNP机器人和大家分享了PNP机器人在多模态具身数据采集和操作策略方向的进展。#机器人 #具身智能#pnp机器人 #数据集#遥操作#灵巧手