基于空间约束的k-means图像分割
上节中我们实现了基于k-means的图像分割,这节我们实现基于空间约束的k-means图像分割。
代码实现
添加空间信息
这里我们在之前的基础上添加相应的坐标信息。部分函数已经在上一节实现了,这里不再重复赘述。这里解释下为什么要在之前的基础上添加相应的坐标信息。
如果只用RGB颜色特征,聚类结果可能:
- 将颜色相似但位置很远的像素归为一类
- 导致分割结果不连续、碎片化
添加坐标信息的好处:
- 空间连续性:鼓励位置相近的像素聚类在一起
- 区域一致性:更容易形成连续的区域分割
- 控制分割粒度 :通过
weight参数可以调整空间信息的重要性weight=0:纯颜色聚类weight越大:越重视空间位置,分割区域越紧凑
python
image = imread('segmentation.jpeg')[:,:,:3]
# 将RGB值统一到0-255内
if np.max(image)>1:
image = image / 255
sp = image.shape
# 增加xy坐标的信息
# 设定一个权重,对坐标信息加权
weight = 2
y = weight * np.array([[i for i in range(sp[1])]
for j in range(sp[0])]) / sp[0] / sp[1]
x = weight * np.array([[j for i in range(sp[1])]
for j in range(sp[0])])/ sp[0] / sp[1]
image = np.append(image, x.reshape(sp[0], sp[1], 1), axis=2)
image = np.append(image, y.reshape(sp[0], sp[1], 1), axis=2)
X = image.reshape(-1, image.shape[2])
segmented_imgs = []
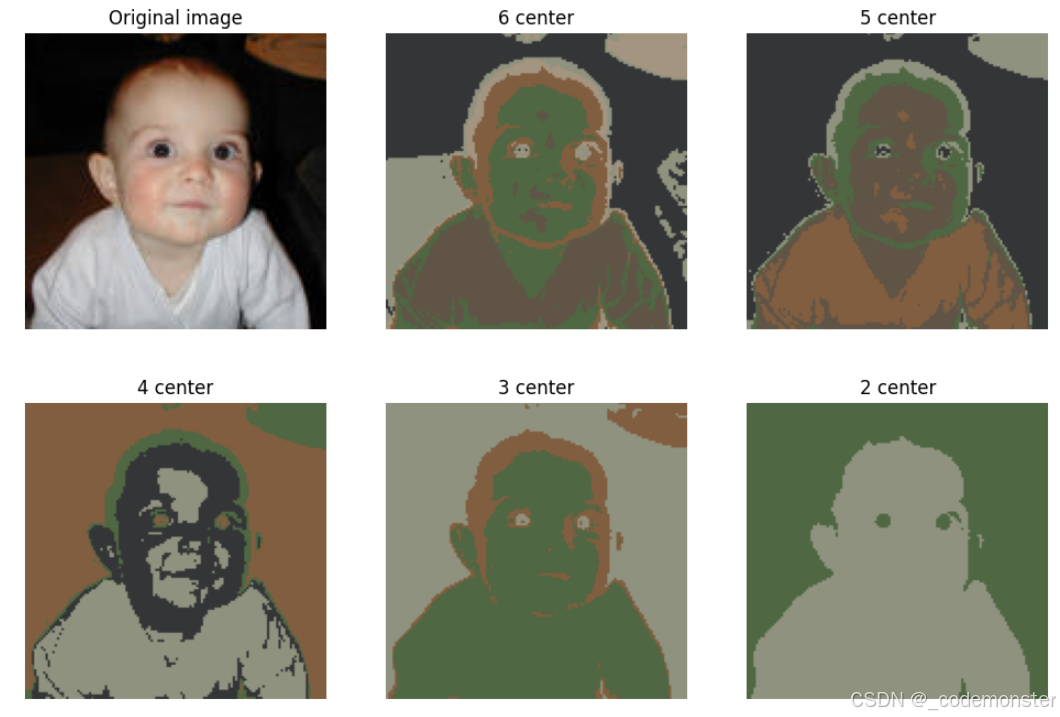
# 将 K 分别设置为6、5、4、3、2
n_colors = (6, 5, 4, 3, 2)
for n_cluster in n_colors:
kmeans = KMeans(n_clusters=n_cluster, random_state=42).fit(X)
segmented_img = kmeans.cluster_centers_[kmeans.labels_]
segmented_imgs.append(decode_segmap(
kmeans.labels_.reshape(image.shape[0],
image.shape[1])).astype(np.uint8))这段代码是在给图像像素添加空间位置信息,然后用于K-means聚类分割。让我详细解释每个部分的作用:
- 获取图像形状
python
sp = image.shape # 得到 (高度, 宽度, 通道数)
# 对于RGB图像通常是 (h, w, 3)- 创建y坐标特征矩阵
python
y = weight * np.array([[i for i in range(sp[1])]
for j in range(sp[0])]) / sp[0] / sp[1]- 生成一个与图像同尺寸的矩阵,每个位置的值是该像素的列坐标(从0到宽度-1)
range(sp[1])创建列索引 0, 1, 2, ..., 宽度-1- 外层的
for j in range(sp[0])重复这个行,形成一个矩阵 / sp[0] / sp[1]将坐标归一化到0,1范围(除以总像素数)weight = 2给坐标信息一个权重,控制它在聚类中的重要性
实际效果:创建一个矩阵,从左到右值从0线性增加到1
- 创建x坐标特征矩阵
python
x = weight * np.array([[j for i in range(sp[1])]
for j in range(sp[0])]) / sp[0] / sp[1]- 生成一个与图像同尺寸的矩阵,每个位置的值是该像素的行坐标(从0到高度-1)
- 注意这里的循环变量交换了:
j在外层循环(行索引)
实际效果:创建一个矩阵,从上到下值从0线性增加到1
- 将坐标信息添加到图像特征中
python
image = np.append(image, x.reshape(sp[0], sp[1], 1), axis=2)
image = np.append(image, y.reshape(sp[0], sp[1], 1), axis=2)axis=2表示在通道维度拼接- 原来图像是 (h, w, 3) - RGB三通道
- 添加x坐标后变成 (h, w, 4)
- 再添加y坐标后变成 (h, w, 5)
- 重塑为特征矩阵
python
X = image.reshape(-1, image.shape[2])- 将 (h, w, 5) 重塑为 (h×w, 5) 的矩阵
- 每一行代表一个像素的5维特征:R, G, B, x坐标, y坐标
举例说明:
假设有一张图,左上角和右下角都有相似的红色:
- 只用RGB:这两个红色区域会被分到同一类
- 添加xy坐标:由于位置差异大,会被分到不同类,形成更合理的分割
循环嵌套
python
y = weight * np.array([[i for i in range(sp[1])]
for j in range(sp[0])]) / sp[0] / sp[1]对于上面的循环嵌套,乍一看可能会很懵这里详细解释下。
- 首先理解
sp[0]和sp[1]
python
sp = image.shape # (高度, 宽度, 通道数)
sp[0] = 图像的高度 (行数)
sp[1] = 图像的宽度 (列数)- 简化这个表达式
原始的代码可以分解为两步:
第一步:创建y坐标矩阵
python
# 创建一个列表推导式
matrix = []
for j in range(sp[0]): # 遍历所有行
row = []
for i in range(sp[1]): # 遍历所有列
row.append(i) # 当前列的位置
matrix.append(row)
# 等价于
y_matrix = np.array([[i for i in range(sp[1])] for j in range(sp[0])])举个例子:
如果图像尺寸是 3×4(高3像素,宽4像素):
python
# range(sp[1]) = range(4) = [0, 1, 2, 3]
# 这个值在每一行都重复
y_matrix = [
[0, 1, 2, 3], # 第一行
[0, 1, 2, 3], # 第二行
[0, 1, 2, 3] # 第三行
]关键点 :这个矩阵的列值从左到右递增 ,但是每一行的列值都相同
- 然后是归一化和加权
python
y = weight * y_matrix / sp[0] / sp[1]实际上是:
python
y = weight * y_matrix / (sp[0] * sp[1])继续上面的例子:
python
weight = 2
sp[0] = 3, sp[1] = 4
除数 = 3 × 4 = 12
原始值:[0, 1, 2, 3]
归一化后:[0/12, 1/12, 2/12, 3/12] = [0, 0.0833, 0.1667, 0.25]
加权后:×2 = [0, 0.1667, 0.3333, 0.5]
最终y矩阵:
[
[0, 0.1667, 0.3333, 0.5],
[0, 0.1667, 0.3333, 0.5],
[0, 0.1667, 0.3333, 0.5]
]展示结果
python
# 展示结果
plt.figure(figsize=(12,8))
plt.subplot(231)
plt.imshow(image[:,:,:3])
plt.title('Original image')
plt.axis('off')
for idx,n_clusters in enumerate(n_colors):
plt.subplot(232+idx)
plt.imshow(segmented_imgs[idx])
plt.title('{} center'.format(n_clusters))
plt.axis('off')输出