一,相关概念和流程
在图像识别任务中,模型输出的高维特征往往难以直接解读。t-SNE(t-Distributed Stochastic Neighbor Embedding)作为一种非线性降维技术,能够将高维数据映射到二维或三维空间,保留数据局部结构的同时揭示潜在分布模式
二,实例
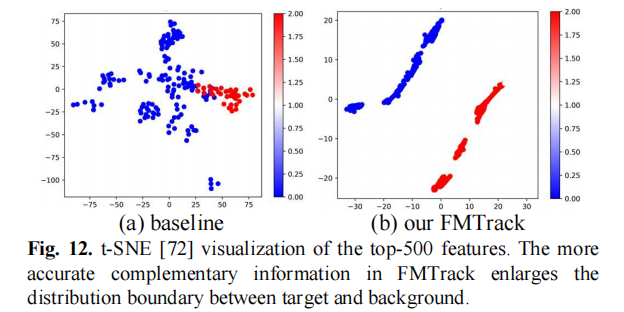
图中的红色点代表目标(Target) ,蓝色点代表背景(Background)。我们可以通过对比 (a) 和 (b) 得到以下三个核心结论:
1. 判别性的增强:从"纠缠"到"对立"
- 左图 (a) Baseline :可以看到红色点和蓝色点之间有大量的重叠和交叉。这说明基础模型在处理特征时,有些背景长得太像目标,或者目标特征不够纯净,导致模型"傻傻分不清楚"。在跟踪时,这种情况很容易导致红框跟丢,去跟了背景里的电线杆或树木。
- 右图 (b) FMTrack :红色点和蓝色点形成了两个完全独立、互不干涉的集群(Clusters) 。它们之间的空隙非常大。这说明 FMTrack 提取的特征具有极强的判别性(Discriminative power)。
2. 验证了"频率感知"和"专家融合"的有效性
论文作者放这张图的目的是为了证明:
- 频率感知 (FIN):通过提取 RGB 的边缘细节和 TIR 的稳定轮廓,模型把目标和背景在特征层面上彻底"撕开"了。
- 互补信息 (Complementary information) :正如图下的文字所说,FMTrack 能够更准确地利用模态间的互补信息,使得目标与背景之间的分布边界(Boundary)被显著扩大了。
3. 与预测公式的联系
这张图解释了为什么公式 (15) 的 能奏效:
能奏效:
- 在 (a) 的情况下,由于红蓝点交织,得分图
 可能会在背景处也产生很高的分值,导致
可能会在背景处也产生很高的分值,导致 argmax选错点。 - 在 (b) 的情况下,目标(红点)在特征空间里极其突出。这意味着在生成的得分图上,只有目标中心会有唯一的、极高的能量点,而背景区域的分值会非常低。
这是在浏览器上找的图
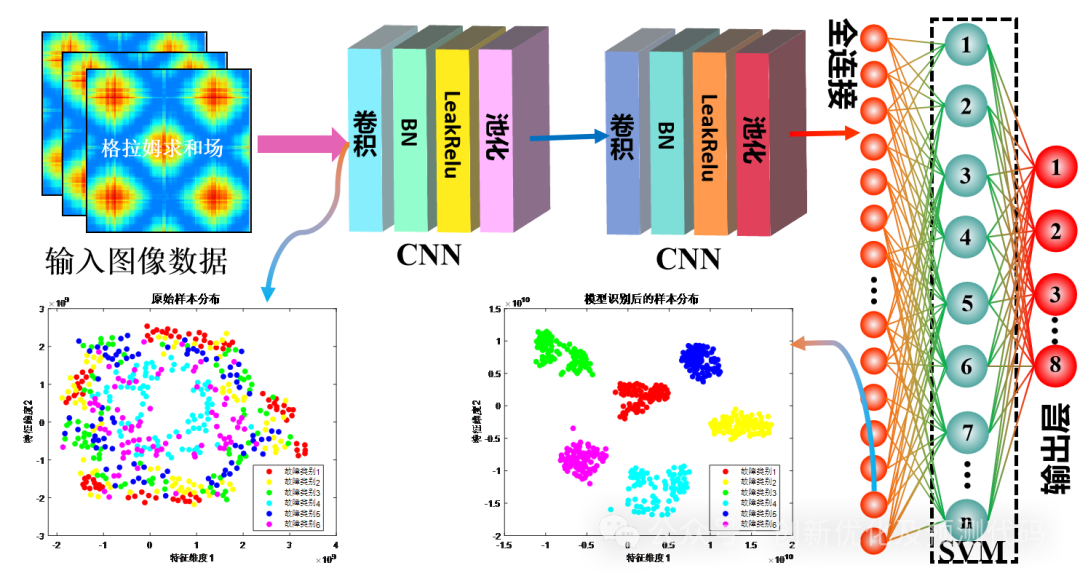
图来源:
高分SCI必备!t-SNE降维,2个应用示例,特征可视化,可解释性,深度学习故障识别,回归预测的必备工具!不信你还不会!-CSDN博客
参考文章: