BeyondMimic 官方仓库在 README 中给出了一个推荐的软件环境,大致包括:
-
Isaac Sim:4.5.0
-
Isaac Lab:2.1.0
-
Python:3.10
-
平台:Linux x86_64
1. Isaac-sim 安装配置流程
https://docs.isaacsim.omniverse.nvidia.com/4.5.0/installation/download.html
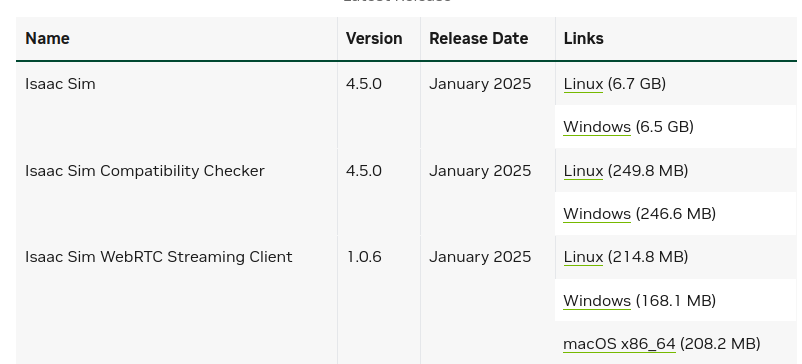
下载完成后命名为:
- IsaacLab 2.1.0
下载代码:
git clone https://github.com/isaac-sim/IsaacLab.git
切换版本:
cd ~/IsaacLab
git checkout v2.1.0验证一下,输出应该是v2.1.0
git describe --tags在 IsaacLab 里创建软链接 _isaac_sim
# 在 IsaacLab 目录下,创建指向 Isaac Sim 安装路径的软链接
# 注意替换username和isaac sim的文件夹名称
cd ~/IsaacLab
ln -s /home/username/isaac-sim-4.5.0 _isaac_sim这样在IsaacLab下面就有个_isaac_sim文件:

3.构建conda环境
conda create -n isaaclab python=3.10 -y
conda activate isaaclab
pip install torch==2.5.1 torchvision==0.20.1 --index-url https://download.pytorch.org/whl/cu124 -i https://mirrors.aliyun.com/pypi/simple测试GPU
python - << 'PY'
import torch
print("torch:", torch.__version__)
print("cuda ok:", torch.cuda.is_available())
if torch.cuda.is_available():
print("device:", torch.cuda.get_device_name(0))
PY
#要跑 IsaacLab / BeyondMimic,大致都要先做1.2.3这三步
conda activate isaaclab # 1. 激活你已经配置好的环境
cd ~/skx/IsaacLab # 2. 进入 IsaacLab 仓库
source _isaac_sim/setup_conda_env.sh # 3. 让 Isaac Sim 把自己的 python 路径等注入到当前 conda 环境
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py # 测试 create_empty 脚本4.BeyondMimic环境配置
conda activate isaaclab
git clone https://github.com/HybridRobotics/whole_body_tracking.git
cd whole_body_tracking
python -m pip install -e source/whole_body_tracking下载 Unitree 机器人描述文件
curl -L -o unitree_description.tar.gz \
https://storage.googleapis.com/qiayuanl_robot_descriptions/unitree_description.tar.gz
解压后放到whole_body_tracking/assets里面如下图:

登入wandb:
pip install wandb
wandb login
登入后
打开 WandB 网页,在左边 Core → Registry 里新建一个 collection:
-
Name: Motions
-
Artifact type: All Types

#把XX换为自己路径
cd ~/XX/whole_body_tracking
mkdir -p data/motions通过网址https://huggingface.co/datasets/lvhaidong/LAFAN1_Retargeting_Dataset
下载数据,下载G1数据随便下载csv,这里我下载的walk1_subject1.csv放到whole_body_tracking中data/motions

用脚本转换为 .npz 并上传到 Registry,例如:
python scripts/csv_to_npz.py --input_file /home/ubuntu/whole_body_tracking/data/motions/walk1_subject1.csv --input_fps 30 --output_name g1_walk --headless执行完后,WandB Registry 里就会出现一个类似
Motions/g1_walk 的 artifact,日志里也会看到类似内容
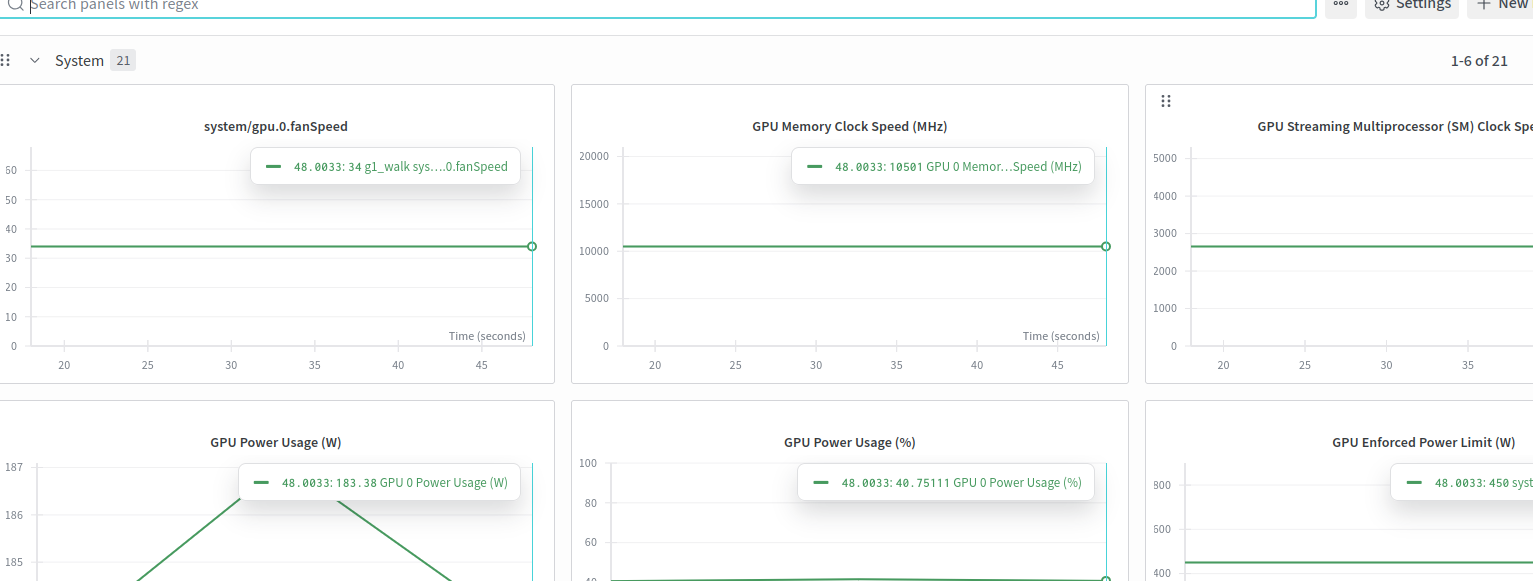
INFO: Logging motion to wandb: g1_walk
INFO: Motion saved to wandb registry: motions/g1_walk
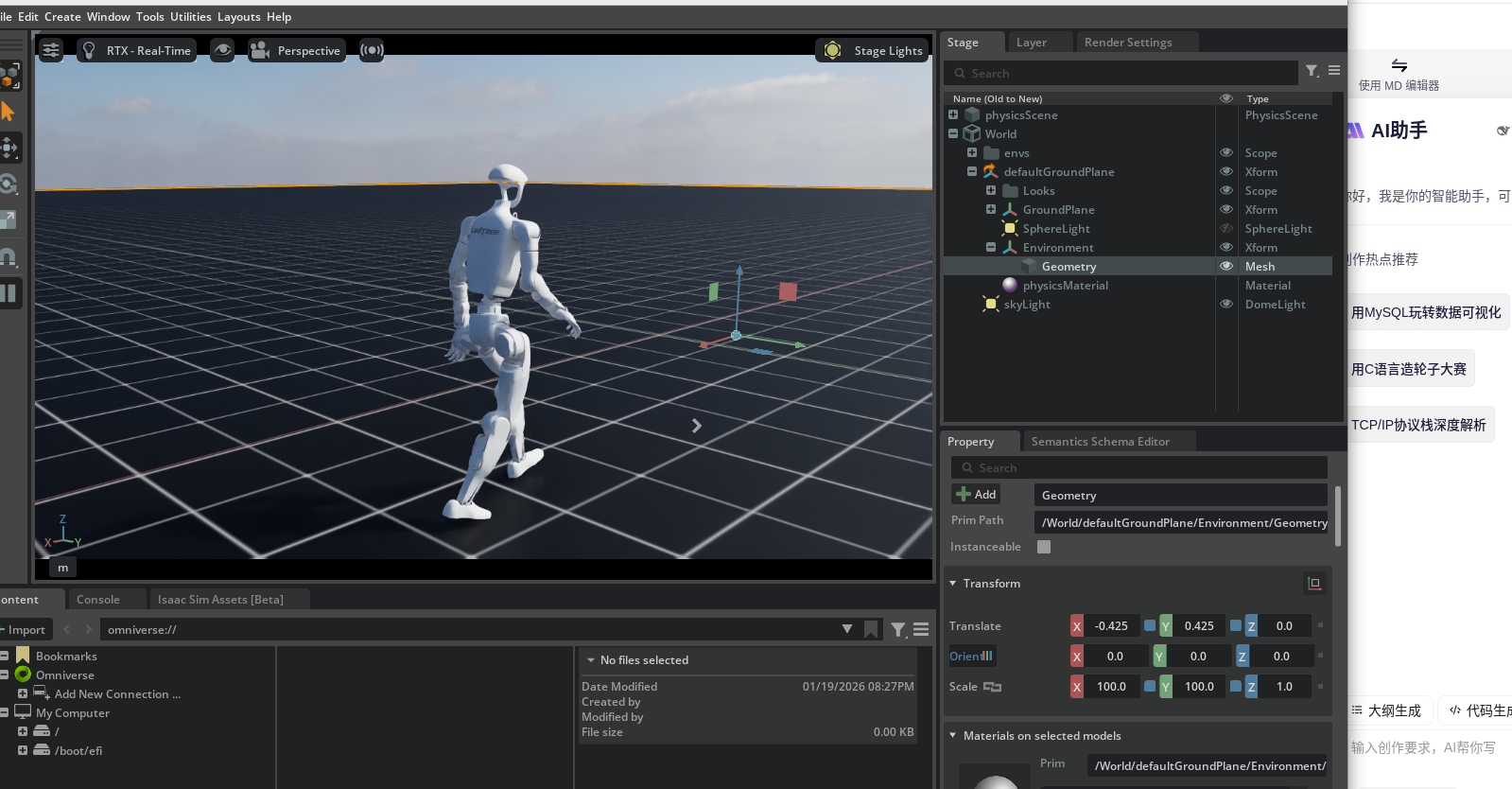
用 Isaac Sim 回放动作(测试数据 + WandB)
# 先走一遍"固定开场三步",这里xx换为自己目录
conda activate isaaclab
cd ~/xx/IsaacLab
source _isaac_sim/setup_conda_env.sh
# 回到项目目录
cd ~/xx/whole_body_tracking
# 用 isaaclab.sh 起 Isaac Sim 回放动作
../IsaacLab/isaaclab.sh -p scripts/replay_npz.py \
--registry_name=你的org名-org/wandb-registry-motions/g1_walk最后效果: