目录
[C++ 代码实现 (Construction)](#C++ 代码实现 (Construction))
[1. 揭示本质冲突](#1. 揭示本质冲突)
[2. 引入物理模型:相对运动](#2. 引入物理模型:相对运动)
[3. 推导参数的选择](#3. 推导参数的选择)
[4. 描述执行过程](#4. 描述执行过程)
变量化本质 (Mathematical Deconstruction)
建立逻辑恒等式 (The Logical Identity)
[C++ 代码实现(Construction)](#C++ 代码实现(Construction))
题目描述:
给你一个链表的头节点 head ,判断链表中是否有环。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。注意:pos 不作为参数进行传递 。仅仅是为了标识链表的实际情况。
如果链表中存在环 ,则返回 true 。 否则,返回 false 。
示例 1:
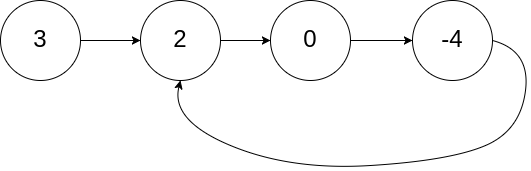
输入:head = 3,2,0,-4, pos = 1
输出:true
解释:链表中有一个环,其尾部连接到第二个节点。
(来源:Leecode)
回归本质 (Deconstruction)
1. 链表的物理事实是什么?
-
单链表是一个单向流动的结构,每个节点只知道"下一步"在哪。
-
正常链表:像一条射线,终点是
nullptr。 -
带环链表:像一个操场跑道,一旦进入环,就永远没有终点,只能不断循环。
2. 核心矛盾是什么? 如果我们像普通的遍历那样一直走下去:
-
如果没有环,我们会撞到终点(
nullptr),程序停止。 -
如果有环,程序会陷入无限死循环。
-
问题在于: 计算机无法仅凭"一直在走"就判定"我进入了环",因为它不知道前面是否还有一个极长的链。
寻找切入点 (The Insight)
如何证明自己在"兜圈子"?
方案 A:记忆法(哈希表)
-
逻辑:拿个小本本记下走过的每个节点的地址。每走一步,查一下本子。
-
代价:需要额外的空间(O(n))来存放记录。如果面试官要求空间复杂度为 O(1)(不准用小本本),我们该怎么办?
方案 B:相对速度法 (第一性原理的突破) 回到物理世界的直觉:在操场上跑步。
-
如果两个人在直路上跑,速度快的人只会越跑越远,永远不会相遇。
-
如果在环形操场上跑,速度快的人(快指针)一定会在某一时刻"套圈"那个速度慢的人(慢指针)。
底层真理: 在一个有限的循环空间内,两个具有速度差的物体必然会相遇。
逻辑推演 (Deduction)
我们要设计两个指针:
-
慢指针 (Slow):每次走 1 步。
-
快指针 (Fast):每次走 2 步。
为什么快指针走 2 步,而不是 3 步或 100 步?
-
从第一性原理考虑:快指针相对于慢指针的相对速度是 1 步/次。
-
这意味着在环内,每移动一次,它们之间的距离就缩短 1。
-
距离从 N, N-1, ..., 1,最终变为 0。它们一定会精确地在某个节点相遇,而不会直接跳过去。
C++ 代码实现 (Construction)
让我们用 C++ 把这个逻辑变成现实。
cpp
class Solution {
public:
bool hasCycle(ListNode *head) {
// 第一性原理:空链表或只有一个节点的链表不可能有环
if (head == nullptr || head->next == nullptr) {
return false;
}
// 初始化:两名运动员在起点准备
ListNode *slow = head;
ListNode *fast = head;
// 只要快指针没跑到终点,比赛就继续
while (fast != nullptr && fast->next != nullptr) {
slow = slow->next; // 慢指针走 1 步
fast = fast->next->next; // 快指针走 2 步
// 核心逻辑:如果相遇,说明存在环
if (slow == fast) {
return true;
}
}
// 如果跳出了循环,说明快指针撞到了终点 (nullptr)
return false;
}
};1. 时间复杂度:
-
如果没有环,快指针走 n/2 步到达终点。
-
如果有环,快指针进入环后,最多在 n 步内追上慢指针。
-
结论:O(n)。
2. 空间复杂度:
-
我们只使用了两个指针变量,没有开启额外的存储空间。
-
结论:O(1)。
面试回答
1. 揭示本质冲突
首先,指出单链表检测环的特殊性:
"检测链表是否有环,核心难点在于'信息的有限性'。由于单链表只能向后看,如果我们只用一个指针遍历,当它进入环路后,它无法分辨自己是在走一段极长的路,还是在重复走过的路。
除非我们记录下所有走过的节点地址(哈希表),但这会消耗 O(n) 的空间。所以,我们需要一个不需要记忆就能证明'重复'的物理模型。"
2. 引入物理模型:相对运动
通过生活中的常识引入算法逻辑,这会让面试官觉得你对算法有直观的理解:
"我借鉴了**'操场套圈'**的逻辑。在环形跑道上,两个速度不同的人从同一点出发,跑得快的人必然会领先慢的人一整圈,从而实现'追尾'。
这里的底层逻辑是:在闭合环路中,相对速度会导致距离的周期性重合。"
3. 推导参数的选择
这是一个高阶技巧,解释为什么快指针步长选 2:
"为了实现这个模型,我设置了两个指针:慢指针
slow每次走 1 步,快指针fast每次走 2 步。为什么要选 2 步?因为从第一性原理分析,快指针相对于慢指针的相对速度是
2 - 1 = 1。这意味着,一旦两个指针都进入环内,它们之间的距离每移动一次就会缩小 1。由于步长差是 1,它们一定会相遇而不会跳过彼此。如果快指针选 3 步或更多,理论上它们可能在某些小环中'擦肩而过',需要更多逻辑去判断。"
4. 描述执行过程
简洁地概括代码的行为:
"在执行过程中:
如果
fast最终指向了nullptr或其next为空,说明链表是有终点的,无环。如果在某一时刻
fast == slow,则证明快指针完成了'套圈',必有环。这个算法的时间复杂度是 O(n),空间复杂度是 O(1),它是检测环路的最优解。"
💡 面试官可能的深度追问
追问:如果快指针每次走 3 步,慢指针走 1 步,一定会相遇吗?
"在连续的空间里一定会,但在链表这种离散节点的空间里,不一定能'立即'相遇。
相对速度为 2。假设环的长度是 L,进入环时两者距离为 D。每次移动距离缩小 2。
如果 D 是偶数,它们会相遇。
如果 D 是奇数,它们会跳过彼此,进入下一轮追逐。
只要 L 和相对速度 2 不是互质的(或者经过数学推导,在离散数学中这最终也会收敛),它们最终还是会相遇,但步长为 2 的相对速度(1)是最稳健的,因为它保证了距离每次减 1,绝不会跳过相遇点。"
变体:找到环的"入口节点"
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。
不允许修改 链表。
寻找"环的入口节点"是算法面试中的经典难题。如果说判断是否有环靠的是物理直觉 (套圈),那么找入口节点靠的就是数学推导的必然性。
我们继续用第一性原理,从最本质的距离关系出发。
变量化本质 (Mathematical Deconstruction)
我们要找的是"入口点",让我们把链表的路径拆解为三个物理长度:
-
a:从"头节点"到"环入口点"的距离。
-
b:从"环入口点"到"快慢指针相遇点"的距离(顺时针)。
-
c:从"相遇点"继续往前走,回到"环入口点"的距离。
由此可知,环的总长度 L = b + c。
建立逻辑恒等式 (The Logical Identity)
当快慢指针在环内相遇时,我们列出它们各自走过的总路程:
-
慢指针 (Slow) 走过的路程:S = a + b
(注:慢指针进入环的第一圈内必然会被快指针追上,所以它在环内走的距离不会超过一圈)
-
快指针 (Fast) 走过的路程:F = a + n(b + c) + b
(n 是快指针在环里转的圈数,因为快指针跑得快,可能转了好几圈才遇到慢指针)
第一性原理告诉我们: 快指针的速度是慢指针的两倍。
所以:F = 2S
带入公式:
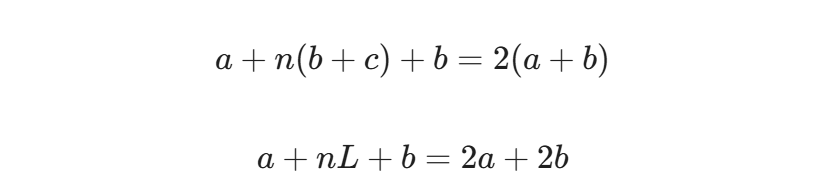
我们要找的是入口点,即求 a。我们将公式变形,孤立出 a:

为了看清本质,我们从 nL 中借出一个 L(即 b+c):
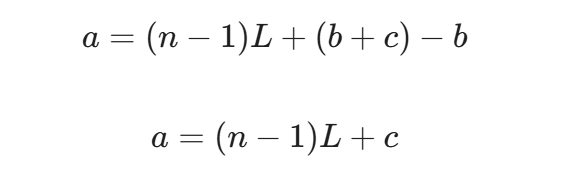
翻译数学为算法 (The "Aha!" Moment)
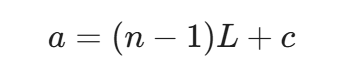
观察这个最终公式:
-
a:从"头节点"走到"入口点"的距离。
-
c:从"相遇点"走到"入口点"的距离。
-
(n-1)L:绕环转了整数圈。
结论:
如果你在快慢指针相遇后,把其中一个指针放回头节点 ,另一个留在相遇点,然后让它们以同样的速度(每次走 1 步)同时出发:
-
从头出发的指针走过 a 步到达入口。
-
从相遇点出发的指针走过 c 步,再转 n-1 圈,也会恰好到达入口!
它们一定会在入口点"相撞"。
C++ 代码实现(Construction)
cpp
class Solution {
public:
ListNode *detectCycle(ListNode *head) {
if (head == nullptr || head->next == nullptr) return nullptr;
ListNode *slow = head;
ListNode *fast = head;
// 第一步:利用快慢指针寻找相遇点(判断是否有环)
bool hasCycle = false;
while (fast != nullptr && fast->next != nullptr) {
slow = slow->next;
fast = fast->next->next;
if (slow == fast) {
hasCycle = true;
break;
}
}
// 如果没有环,根据第一性原理,直接返回 null
if (!hasCycle) return nullptr;
// 第二步:根据公式 a = (n-1)L + c
// 让其中一个指针回到 head,另一个保持在相遇点
slow = head;
while (slow != fast) {
// 两个指针同时匀速(1步)前进
slow = slow->next;
fast = fast->next;
}
// 它们相遇的地方就是入口点
return slow;
}
};