实验项目4 光电式传感器原理与应用(基于Matlab)
一. 实验目的
建立CCD图像传感器的数学模型与图像处理流程
理解光纤传感器的调制原理与信号解调方法
掌握光电式传感器的系统设计与性能分析方法
二. 实验设备与环境
MATLAB R2020a或更高版本
Simulink仿真环境
Image Processing Toolbox(用于图像处理)
Communications Toolbox(用于光纤通信仿真)
Signal Processing Toolbox(用于信号处理)
三. 实验内容与步骤
第一部分:CCD图像传感器建模与图像处理
- 主图形窗口布局
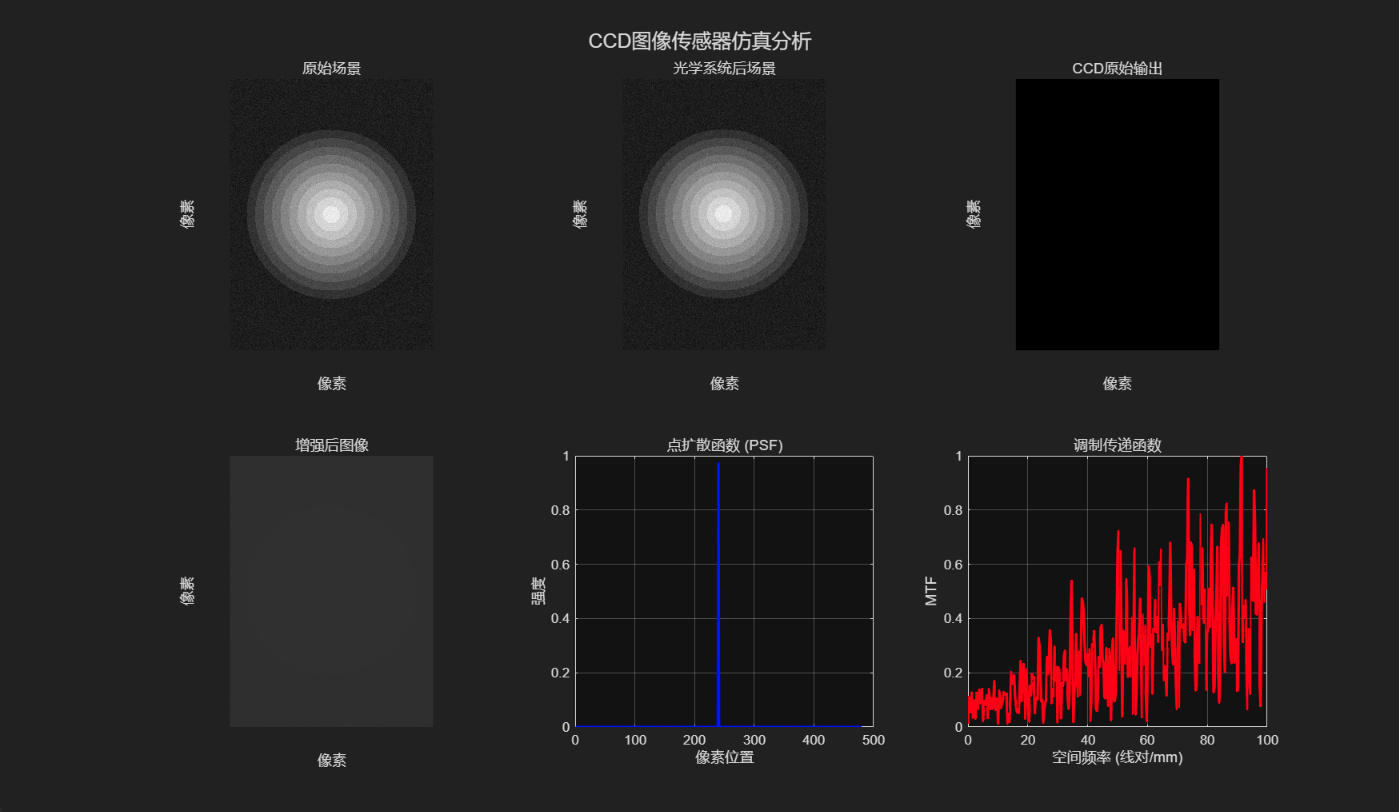
将显示一个2行×3列的子图布局,总标题为"CCD图像传感器仿真分析"。
- 各子图具体内容:
子图1 (左上):原始场景
显示同心圆组成的分辨率测试卡
10个不同半径的灰色同心圆环
叠加随机纹理噪声
整体呈现灰度图像,中心最亮,向外逐渐变暗
子图2 (中上):光学系统后场景
原始场景经过光学模糊后的效果
图像边缘变得柔和模糊
同心圆环的边界不再锐利
整体对比度降低,细节减少
呈现典型的光学系统点扩散函数(PSF)效应
子图3 (右上):CCD原始输出
数字化的12位灰度图像 (0-4095灰度级)
包含所有噪声效应:
暗电流噪声(均匀背景噪声)
读出噪声(随机高斯噪声)
固定模式噪声(像素间增益和偏置差异)
可能显示一些坏点(异常亮或暗的像素)
图像相对较暗,需要后续增强
子图4 (左下):增强后图像
经过处理的图像,包含:
坏点校正(去除异常像素)
数字增益(1.5倍)和偏置调整(+100)
伽马校正(γ=2.2)
图像对比度增强
暗部细节提升
色彩映射更符合人眼感知
子图5 (中下):点扩散函数 (PSF)
蓝色曲线,显示PSF的横截面
典型的Airy斑分布:
中心主瓣(最高峰)
旁瓣振荡(逐渐衰减的次级峰)
图形具有以下特征:
X轴:像素位置
Y轴:归一化强度
有网格线
主瓣宽度反映光学系统分辨率
子图6 (右下):调制传递函数 (MTF)
红色曲线,显示MTF随空间频率的变化
典型的MTF曲线特征:
起始于1.0(归一化)
随频率增加而衰减
X轴限制在0-100线对/mm
曲线单调递减
反映光学系统和传感器的综合频率响应
 第二部分:光纤传感器建模与信号处理
第二部分:光纤传感器建模与信号处理
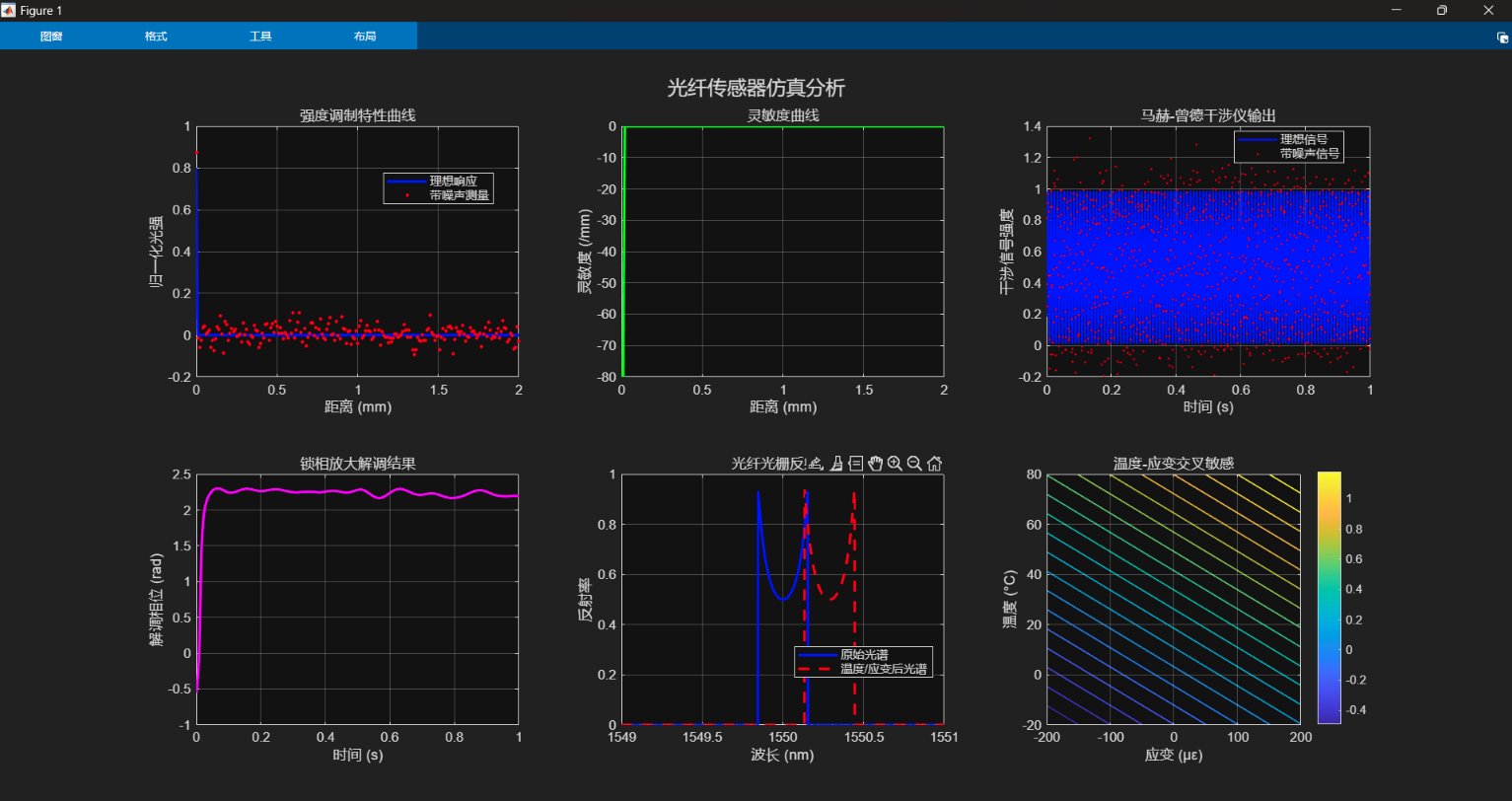
子图1 (左上):强度调制特性曲线
坐标轴:
X轴:距离 (mm),范围 0-2 mm
Y轴:归一化光强
曲线特征:
蓝色实线:理想响应曲线,呈现先上升后下降的双峰特性
红色点:带噪声测量数据,在理想曲线上方添加随机扰动
视觉效果:
曲线从原点开始上升,在约0.5-1.0mm处达到峰值
随后因几何损耗和菲涅尔反射呈指数衰减
红点随机分布在蓝线周围
子图2 (中上):灵敏度曲线
坐标轴:
X轴:距离 (mm),范围 0.01-2 mm
Y轴:灵敏度 (/mm)
曲线特征:
绿色实线:灵敏度随距离变化曲线
呈现双极性特征(正负值)
视觉效果:
在响应曲线的拐点处灵敏度最大
曲线在零点附近交叉
子图3 (右上):马赫-曾德干涉仪输出
坐标轴:
X轴:时间 (s),范围 0-1秒
Y轴:干涉信号强度
曲线特征:
蓝色实线:理想余弦干涉信号,频率100Hz
红色点:带噪声信号,添加高斯白噪声
视觉效果:
清晰的余弦波形,约100个完整周期
红点密集分布在蓝线周围形成"带状"
子图4 (左下):锁相放大解调结果
坐标轴:
X轴:时间 (s),范围 0-1秒
Y轴:解调相位 (rad)
曲线特征:
品红色实线:解调出的相位随时间变化
呈现线性斜坡(反映温度/应变引起的相位漂移)
视觉效果:
相位从初始值开始线性增加
可能叠加微小波动(来自噪声)
子图5 (中下):光纤光栅反射谱
坐标轴:
X轴:波长 (nm),范围 1549-1551 nm
Y轴:反射率 (0-1)
曲线特征:
蓝色实线:原始FBG反射谱(中心1550nm)
红色虚线:温度/应变作用后的偏移光谱
视觉效果:
典型的高斯型反射谱,半高宽约0.1-0.2nm
红虚线相对蓝实线向右偏移约0.1-0.2nm
峰值反射率接近1
子图6 (右下):温度-应变交叉敏感
坐标轴:
X轴:应变 (με),范围 -200 到 200 με
Y轴:温度 (°C),范围 -20 到 80 °C
图形特征:
等高线图,20条等高线
色标显示波长漂移量 (nm)
视觉效果:
等高线呈对角线分布
显示温度与应变的耦合效应(交叉敏感)
右下角有色标,显示波长漂移范围约0-0.3nm
 第三部分:综合应用 - 机器视觉测量系统
第三部分:综合应用 - 机器视觉测量系统
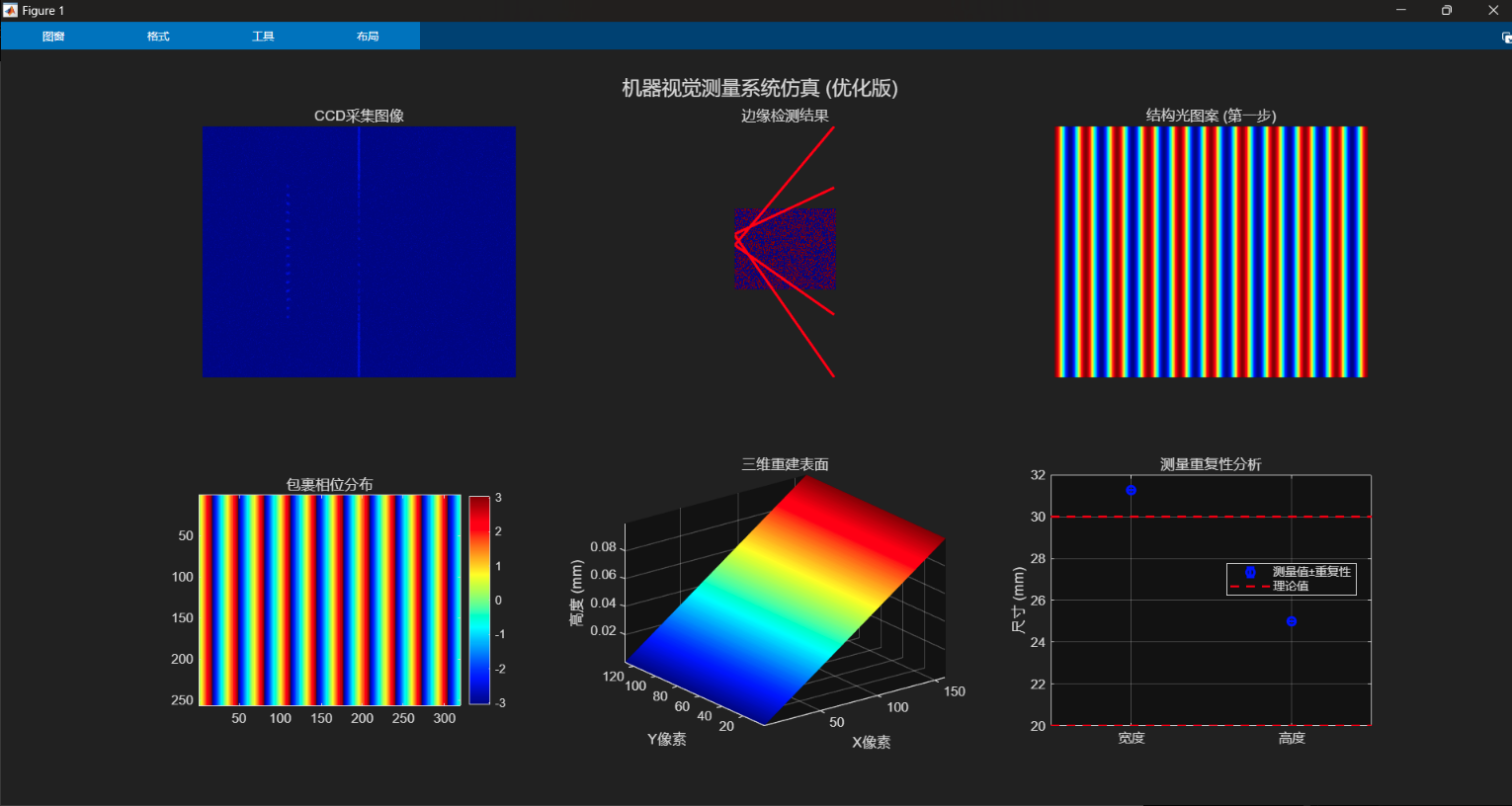
子图1 (左上):CCD采集图像
显示内容:512×640像素的灰度图像
图像特征:
中心区域有一个明亮的矩形物体(模拟机械零件)
物体中心有一个圆形暗区(模拟孔洞)
表面有轻微噪声纹理
背景为暗灰色(接近0值)
对比度范围:0-4095(12位ADC)
视觉效果:类似工业相机拍摄的零件图像
子图2 (中上):边缘检测结果
显示内容:二值边缘图像
图像特征:
白色边缘勾勒出物体轮廓
可能检测到4条主要直线边界
物体内部的圆形孔洞边缘可能可见
图像上有4条红色直线叠加(霍夫变换检测结果)
视觉效果:黑白二值图,红色直线覆盖
子图3 (右上):结构光图案
显示内容:正弦条纹图案
图像特征:
垂直方向的余弦条纹
明暗相间的周期性图案
亮度范围:0-1(归一化)
条纹频率:10个周期跨越图像宽度
视觉效果:类似干涉条纹的灰度图案
子图4 (左下):包裹相位分布
显示内容:相位编码的彩色图像
图像特征:
彩色编码的相位图(使用jet色图)
相位值范围:-π到π
中心区域有明显的相位变化(对应物体形状)
显示分辨率降低(256×320,因降采样)
视觉效果:彩虹色的相位分布图,有色带跳变
子图5 (中下):三维重建表面
显示内容:3D曲面图
图像特征:
曲面显示物体的三维形状
中心有凹陷(模拟孔洞)
表面有轻微起伏(模拟粗糙度)
显示分辨率降低(128×160,因降采样)
使用jet色图表示高度
视觉效果:3D网格曲面,无边缘线,平滑着色
子图6 (右下):测量重复性分析
显示内容:误差条形图
图像特征:
两个数据点:宽度和高度
蓝色误差条表示测量值的±重复性
红色虚线表示理论值(30mm和20mm)
X轴标签:"宽度"和"高度"
Y轴标签:"尺寸 (mm)"
网格线
图例:"测量值±重复性"和"理论值"
视觉效果:标准的误差条形图,有参考线
 1. CCD传感器的量子效率对系统性能有哪些影响?
1. CCD传感器的量子效率对系统性能有哪些影响?
量子效率(Quantum Efficiency, QE) 定义为CCD将入射光子转换为电子的效率。其对系统性能的影响包括:
1.1 直接影响指标:
· 信噪比(SNR):QE越高,光电转换效率越高,信号越强,信噪比越好
SNR \propto \sqrt{QE \cdot N_{photon}}
· 灵敏度:高QE意味着对弱光更敏感,可降低照明功率要求
· 动态范围:高QE可提高信号电平,从而扩大动态范围
1.2 光谱响应特性:
· 光谱匹配:QE随波长变化,需与光源波长匹配
· 典型硅基CCD:峰值QE约60-90%(400-700nm)
· 红光(630nm):QE通常为50-70%
· 红外/紫外响应:普通CCD对近红外敏感(可达1000nm),但需注意热噪声
1.3 系统设计影响:
· 曝光时间:QE高可缩短曝光时间,提高测量速度
· 照明要求:QE每提高10%,所需照明功率可降低约10%
· 光学系统f/#:高QE可允许使用更小的光圈(更大f/#),增加景深
1.4 实际应用考虑:
高QE优势: 低QE限制:
├─ 弱光环境下仍能工作 ├─ 需要更强照明
├─ 可提高测量速度 ├─ 可能产生更多热量
├─ 降低系统功耗 ├─ 限制动态范围
└─ 提高测量精度 └─ 信噪比受限
1.5 本系统(630nm红光)的具体影响:
· 如果选用标准硅CCD(QE≈60%@630nm):
· 光电转换效率:约60%
· 10mW照明 → 有效信号功率:约6mW
· 可满足一般精度要求
· 如果选用背照式CCD(QE≈95%@630nm):
· 信噪比可提高约√(95/60)≈1.26倍
· 测量精度可提高约20%
2. 如何解决光纤传感器的温度和应变交叉敏感问题?
光纤传感器中温度和应变都会引起光信号变化,产生交叉敏感。解决方案包括:
2.1 传感器结构设计方法:
方法 原理 优点 缺点
双参数传感器 使用FBG和FPI组合 同时测量T和ε 结构复杂
双波长法 不同波长对T和ε响应不同 简单有效 需要宽谱光源
双模光纤 LP₀₁和LP₁₁模对T/ε敏感性不同 单根光纤 模式稳定性差
参考光纤法 一根测应变,另一根只测温度 直接补偿 增加成本
2.2 信号处理与解调技术:
(1)矩阵解调法:
(2)温度补偿光纤光栅(FBG):
· 封装补偿:采用负热膨胀材料封装
\alpha_{封装} = -\alpha_{光纤}
· 参考光栅法:自由状态FBG作温度参考
\Delta\lambda_{应变} = \Delta\lambda_{测量} - \Delta\lambda_{参考}
2.3 本系统可采用的实用方案
2.4 工程应用建议:
- 优先级顺序:
```
首选 → 双参数传感器(FBG+FPI)
次选 → 双波长解调法
备用 → 参考光纤法
- 温度范围考虑:
· 室温环境(0-40℃):简单补偿即可
· 工业环境(-20~80℃):需要主动补偿
· 恶劣环境(<-20或>80℃):必须双参数测量
- 精度要求:
· 一般测量:±5με,±1℃
· 精密测量:±1με,±0.1℃(需高级补偿)
3. 在机器视觉系统中,如何选择合适的光源和照明方式?
3.1 选择流程框架:
检测需求分析 → 照明方式选择 → 光源类型选择 → 参数优化
3.2 关键因素分析表:
因素 考虑要点 对本系统的影响
检测特征 表面缺陷、尺寸、纹理 尺寸测量 → 需要均匀照明
物体特性 材质、颜色、反光性 金属零件 → 需避免镜面反射
测量精度 亚像素、微米级 10μm精度 → 需要稳定照明
环境条件 温度、振动、灰尘 工业环境 → 需防护设计
成本约束 预算、维护成本 经济型方案
3.3 照明方式选择指南:
照明方式 适用场景 优点 缺点 本系统建议
前向照明 表面特征明显 简单、均匀 有阴影 ✓ 推荐
背光照明 轮廓测量 高对比度 需透明或悬空 备用
同轴照明 镜面表面 无阴影 复杂、昂贵 考虑
结构光 3D测量 可测深度 需要解算 ✓ 已采用
多角度照明 复杂表面 减少阴影 系统复杂 可选
3.4 光源类型选择:
(1)LED光源(本系统推荐):
· 优点:寿命长(>50,000h)、低热、可调光、响应快
· 红光(630nm)选择理由:
├─ 人眼相对不敏感 → 减少干扰
├─ CCD在红光区QE较高(50-70%)
├─ 穿透性较好(对油污不敏感)
└─ 成本较低
(2)卤素灯:
· 优点:亮度高、全光谱
· 缺点:发热大、寿命短(1,000-2,000h)
· 适用:需要白光或宽谱场合
(3)激光:
· 优点:单色性好、方向性强
· 缺点:散斑、安全要求高
· 适用:结构光投影、精确对准
3.5 本系统(机器视觉测量)的具体选择
3.6 实施方案:
一级照明(主照明):
├─ 方式:环形LED前向照明
├─ 数量:8颗红光LED(630nm)
├─ 功率:每颗0.1W,总功率0.8W
├─ 角度:45°倾斜,减少镜面反射
└─ 控制:PWM调光,可适应不同表面
二级照明(辅助):
├─ 方式:结构光投影(已实现)
├─ 光源:激光+光栅 或 DLP投影
└─ 作用:三维测量补充
3.7 验证与优化:
- 均匀性测试:使用标准白板,测量9点照度
均匀性 = \frac{I_{min}}{I_{max}} \times 100\% > 85\%
-
稳定性测试:1小时内照度变化 < ±2%
-
寿命评估:LED光源 > 50,000小时
-
维护策略:定期清洁、照度校准