GPIO是通用输入输出端口(General-purpose input/output)的英文简写,是所有的微控制器必不可少的外设之一,可以由STM32直接驱动从而实现与外部设备通信、控制以及采集和捕获的功能。引脚电平:0V~3.3V,部分引脚可容忍5V。
|--------|------|------------------------------------------------------------------------|
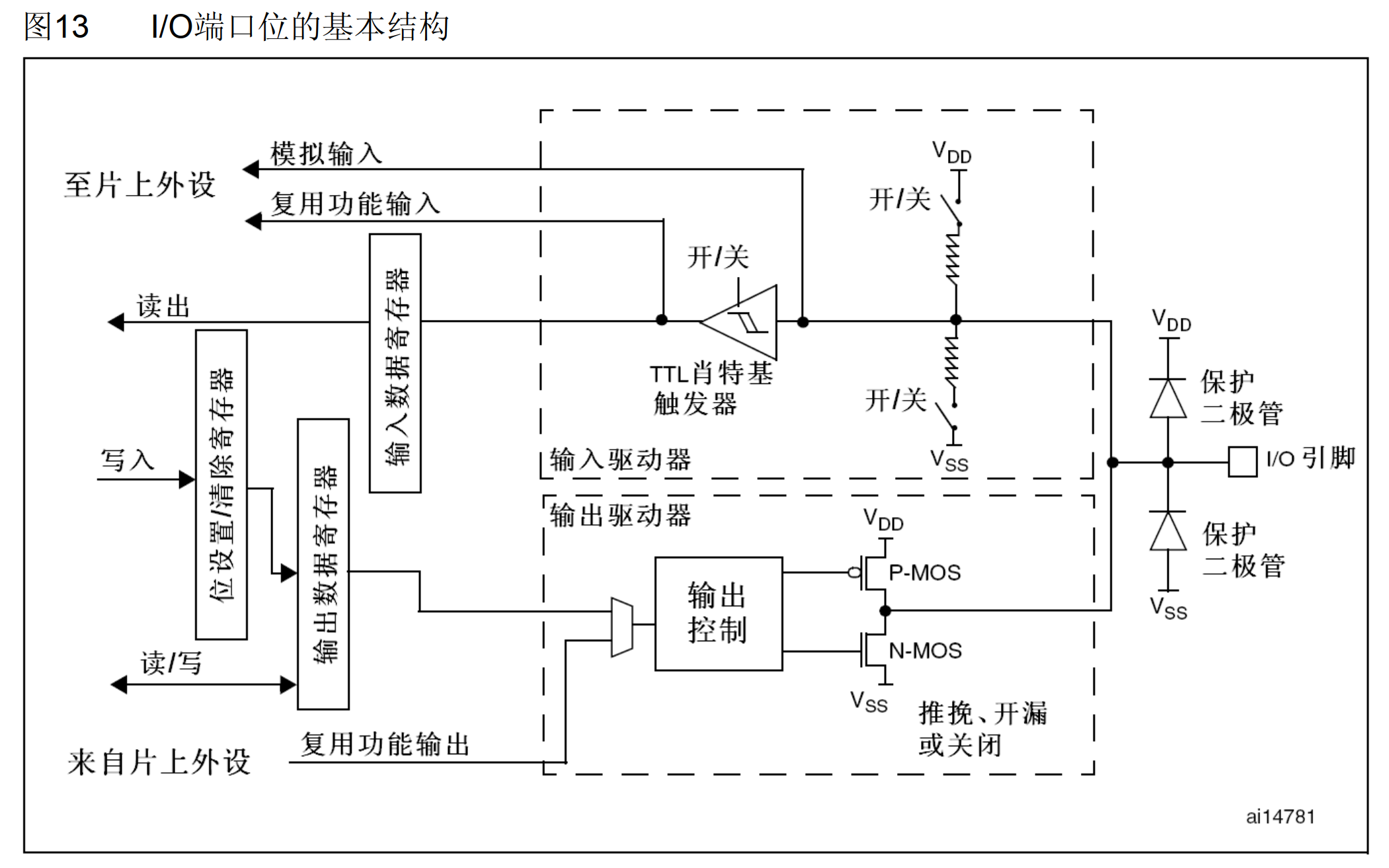
| 浮空输入 | 数字输入 | IO的电平状态是不确定的,完全由外部输入决定 |
| 上拉输入 | 数字输入 | IO口在无输入的情况下,保持高电平 |
| 下拉输入 | 数字输入 | IO口在无输入的情况下,保持低电平 |
| 模拟输入 | 模拟输入 | 输入信号不经施密特触发器直接接入,输入信号为模拟量,其余输入方式输入数字量 |
| 开漏输出 | 数字输出 | 只能输出低电平 |
| 推挽输出 | 数字输出 | 可以输出高、低电平 |
| 复用开漏输出 | 数字输出 | 输出低电平 |
| 复用推挽输出 | 数字输出 | 此时 IO 受内部外设控制,比如定时器的 PWM,比如 SPI 的 MOSI ,MISO 等。 而普通的推挽输出,则 IO 受 ODR 控制 |
GPIO常用HAL库函数
HAL_GPIO_Init
初始化GPIO引脚,配置模式、上下拉、速度等参数。
c
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);
内部通过结构体来配置
- Pin : 指定需要初始化的 GPIO 引脚,可以是单个引脚或组合(如
GPIO_PIN_0 | GPIO_PIN_1)。 - Mode : 设置引脚模式,包括输入、输出、复用功能或模拟模式(如
GPIO_MODE_OUTPUT_PP推挽输出)。 - Pull : 配置上拉/下拉电阻,可选无上拉下拉(
GPIO_NOPULL)、上拉(GPIO_PULLUP)或下拉(GPIO_PULLDOWN)。 - Speed : 定义引脚输出速度,如低速(
GPIO_SPEED_FREQ_LOW)、中速或高速。 - Alternate: 当引脚用于复用功能时,指定具体的复用功能编号(如 USART、SPI 等)。
c
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_5; // 选择引脚5
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 无上拉下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速模式
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化GPIOA
HAL_GPIO_ReadPin
读取指定引脚的电平状态。
c
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
返回值为GPIO_PIN_SET(高电平)或GPIO_PIN_RESET(低电平)。
HAL_GPIO_WritePin
设置指定引脚输出高电平或低电平。
c
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
PinState:GPIO_PIN_SET(高电平)或GPIO_PIN_RESET(低电平)。
HAL_GPIO_TogglePin
翻转指定引脚的电平状态(高变低或低变高)
c
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
HAL_GPIO_EXTI_Callback
外部中断回调函数,用户需重写此函数实现中断处理逻辑。
c
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
需在stm32xx_it.c中调用HAL_GPIO_EXTI_IRQHandler触发此回调。
HAL_GPIO_EXTI_IRQHandler
处理外部中断请求,清除中断标志并调用回调函数。
c
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin);
配置示例
以下代码演示如何配置PA5为推挽输出并控制电平:
c
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); // 输出高电平
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); // 翻转电平
注意事项
- 时钟使能 :使用GPIO前需通过
__HAL_RCC_GPIOx_CLK_ENABLE()开启端口时钟。 - 中断优先级:若使用外部中断,需配置NVIC优先级。
- 弱函数 :
HAL_GPIO_EXTI_Callback是弱定义函数,用户需在代码中重新实现。
串联示例使用
c
#include "stm32f4xx_hal.h"
/* 函数声明 */
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while (1)
{
// 使用WritePin点亮LED
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
HAL_Delay(500);
// 使用TogglePin切换LED状态
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
HAL_Delay(500);
}
}
/* 外部中断处理函数 */
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_13)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_13);
}
}
/* 外部中断回调函数 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_13)
{
// 按键按下时切换LED
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
}
}
/* GPIO初始化函数 */
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/* LED引脚配置 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 按键引脚配置 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; // 上升沿触发中断
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* 中断优先级配置 */
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}