一、定义
正交矩阵 是一个特殊的方阵 (行数和列数相等)。它的核心定义是:
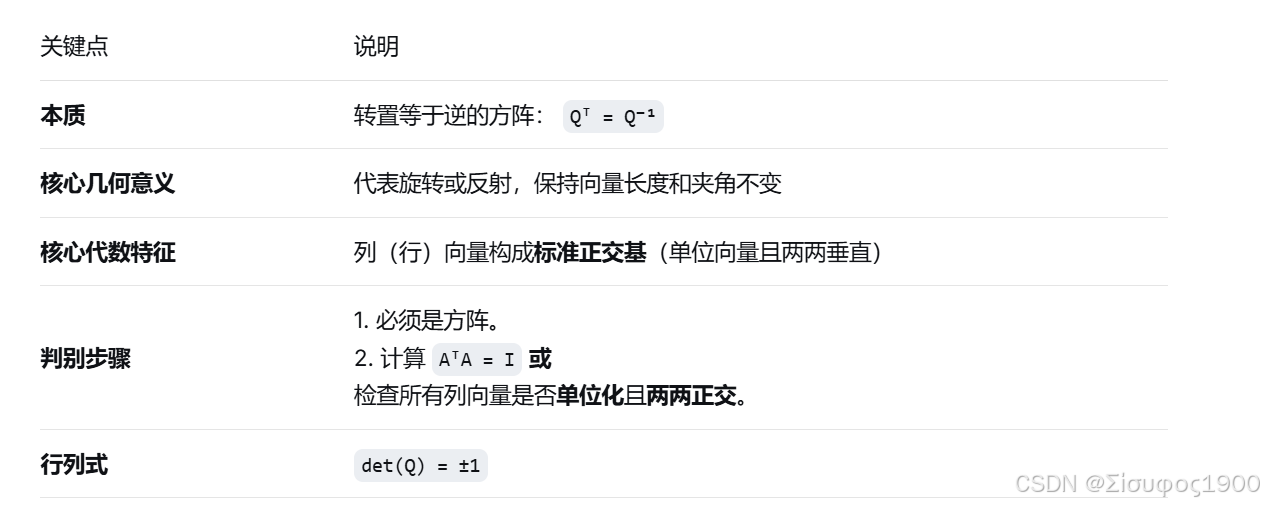
一个矩阵 Q 的转置 Qᵀ 等于它的逆矩阵 Q⁻¹。
二、几何意义和性质
几何特点:
可以把正交矩阵想象成一种**"刚性变换"** 的数学表示。它作用于空间中的向量时,就像旋转 或者镜像反射一样,能保持向量的"形状"和"结构"不变。
具体来说,Q 是正交矩阵,意味着:
-
保持长度不变 :
对于任何向量
x,有||Qx|| = ||x||。将一个向量旋转或反射,它的长度不会变。 -
保持夹角(内积)不变 :
对于任何两个向量
x和y,有(Qx)·(Qy) = x·y。这意味着两个向量之间的角度在经过变换后保持不变。- 推论 :正交向量变换后依然是正交的。
-
列(或行)构成标准正交基 :
这是判别和构造正交矩阵的关键。
-
列视角 :把矩阵
Q写成列向量的形式Q = [q₁, q₂, ..., qₙ]。那么这些列向量qᵢ满足:-
单位长度 :
||qᵢ|| = 1(每个列向量的长度都是1) -
两两正交 :
qᵢ · qⱼ = 0(当i ≠ j时)这样的向量组称为 标准正交向量组。它们是n维空间中的一组"标准尺子"。
-
-
行视角:正交矩阵的行向量同样构成一组标准正交基。
-
代数特点:
-
行列式的值只能是 1 或 -1:
-
det(Q) = 1: 对应的是纯旋转(保持坐标系的手性,比如左手系还是左手系)。 -
det(Q) = -1: 对应的是旋转加镜像反射(改变了手性,比如把左手系变成了右手系)。
-
-
可逆且逆很好求 :
由于
Q⁻¹ = Qᵀ,求它的逆矩阵非常简单,只需要转置即可,计算量极小。 -
乘积保持正交性 :
如果Q和P都是正交矩阵,那么它们的乘积QP也是正交矩阵。连续进行旋转/反射,结果还是一个旋转/反射。
三、 如何判别一个矩阵是否正交?
根据定义和特点,有几种等价的判别方法。对于一个给定的方阵 A,你可以:
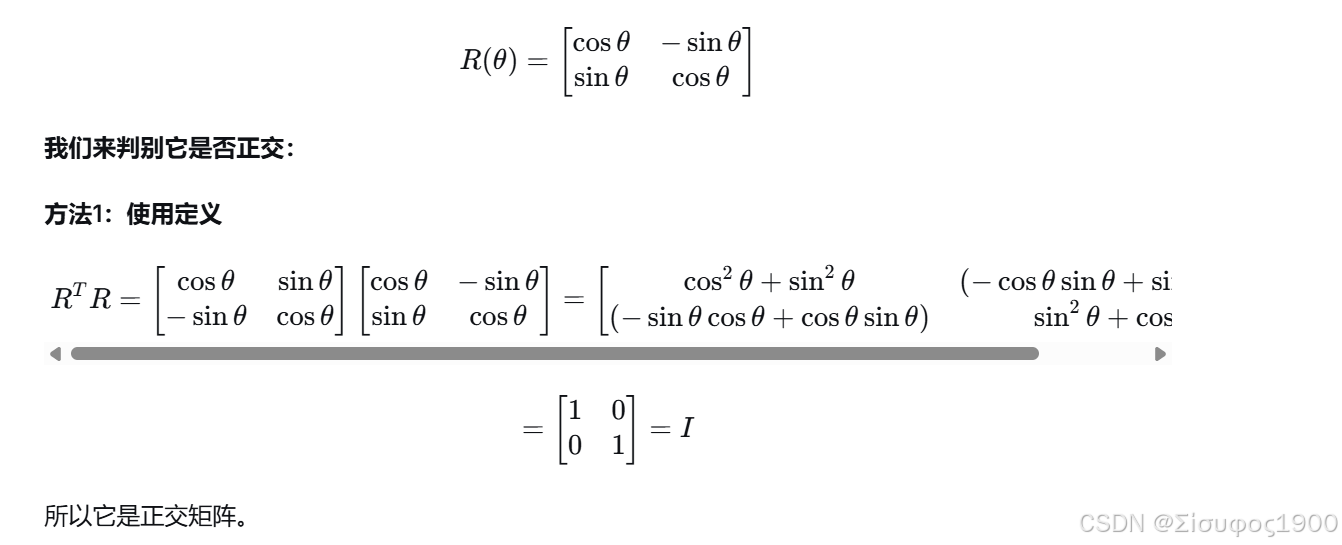
方法1:使用定义(最根本)
计算 AᵀA,看结果是否等于单位矩阵 I。
-
计算
AᵀA。 -
检查 结果矩阵的对角线元素是否都是
1,非对角线元素是否都是0。 -
如果
AᵀA = I,那么A就是正交矩阵。
注意 :对于方阵,
AᵀA = I会自动推出AAᵀ = I,所以检查一个即可。
方法2:检查列向量(最常用、最直观)
将矩阵 A 的每一列看作一个列向量 c₁, c₂, ..., cₙ。
-
条件1: 检查每个列向量的长度(模)是否为 1。
- 即,对于每个
cᵢ,计算cᵢ · cᵢ(或各分量平方和),结果应为1。
- 即,对于每个
-
条件2: 检查任意两个不同的列向量是否正交(点积为0)。
- 即,对于所有
i ≠ j,计算cᵢ · cⱼ = 0。
- 即,对于所有
-
如果所有列向量都是单位向量 且两两正交 ,那么
A就是正交矩阵。
方法3:检查行向量
与方法2完全类似,检查所有行向量是否构成标准正交基。
方法4:结合行列式(辅助判断)
先看 A 是否是方阵,然后计算 det(A)。如果 det(A) 不是 ±1,那它肯定不是 正交矩阵。如果是 ±1,则需要再用方法1或2确认(因为仅凭行列式为±1不足以判定正交)。
案例1
以最经典的 2维旋转矩阵 为例:
方法2:检查列向量
方法2:检查列向量
-
列1:
c₁ = [cosθ, sinθ]ᵀ- 长度:
√(cos²θ + sin²θ) = √1 = 1
- 长度:
-
列2:
c₂ = [-sinθ, cosθ]ᵀ- 长度:
√((-sinθ)² + cos²θ) = √(sin²θ + cos²θ) = 1
- 长度:
-
两列点积:
(cosθ)*(-sinθ) + (sinθ)*(cosθ) = 0 -
所有条件满足,所以它是正交矩阵。
几何意义 :这个矩阵 R(θ) 正是将平面内的向量绕原点逆时针旋转 θ 角度的变换,它完美地保持了向量的长度和夹角。
四、总结:
正交矩阵就是一个"不拉伸、不压缩、只旋转或镜像"的变换,它的列向量就像一把互相垂直的、长度为1的标准尺子。