https://blink.csdn.net/details/1918923
在 Ubuntu 24.04 LTS 中通过 Snap 部署 ROS Noetic 详细教程
一、核心前提说明
Ubuntu 24.04 LTS 原生不支持通过 apt 直接安装 ROS Noetic(Noetic 官方仅适配 Ubuntu 20.04),而 Canonical 提供的 ROS Noetic Snap 包完美解决了这一问题:将 ROS Noetic 核心栈封装为独立、隔离的 Snap 环境,实现跨 Ubuntu 版本运行,且自带严格的安全隔离机制,同时兼容 ROS ESM 服务。
适用场景
- 需要在 Ubuntu 24.04 上运行 ROS Noetic 且不愿降级系统;
- 管理异构设备集群(部分设备 Ubuntu 20.04、部分 24.04),需统一 ROS 环境;
- 需在受限 / 离线环境中使用 ROS Noetic 并获取 ROS ESM 安全更新;
- 追求快速部署、低运维成本的小型团队 / 个人开发者。
二、基础环境准备
1. 检查 Ubuntu 版本与 Snap 状态
bash
运行
# 确认系统版本为 Ubuntu 24.04 LTS
lsb_release -a
# 输出示例:Distributor ID: Ubuntu; Release: 24.04; Codename: noble
# 检查 Snap 是否已安装(Ubuntu 24.04 默认预装)
snap --version
# 若未安装,执行:
sudo apt update && sudo apt install snapd -y
# 重启 Snap 服务确保正常运行
sudo systemctl restart snapd && sudo systemctl enable snapd2. (可选)配置 Ubuntu Pro 以启用 ROS ESM
若需获取 ROS Noetic 的安全更新(ESM 服务),需先激活 Ubuntu Pro:
bash
运行
# 方式1:个人用户(免费)- 通过令牌激活
# 1. 访问 https://ubuntu.com/pro 获取个人令牌
# 2. 执行激活命令(替换 <your-token> 为实际令牌)
sudo pro attach <your-token>
# 方式2:企业用户 - 联系 Canonical 开通专属订阅后,通过以下命令验证
sudo pro status
# 输出中需包含 "ros-esm: enabled" 表示 ROS ESM 已启用三、安装 ROS Noetic Snap 包
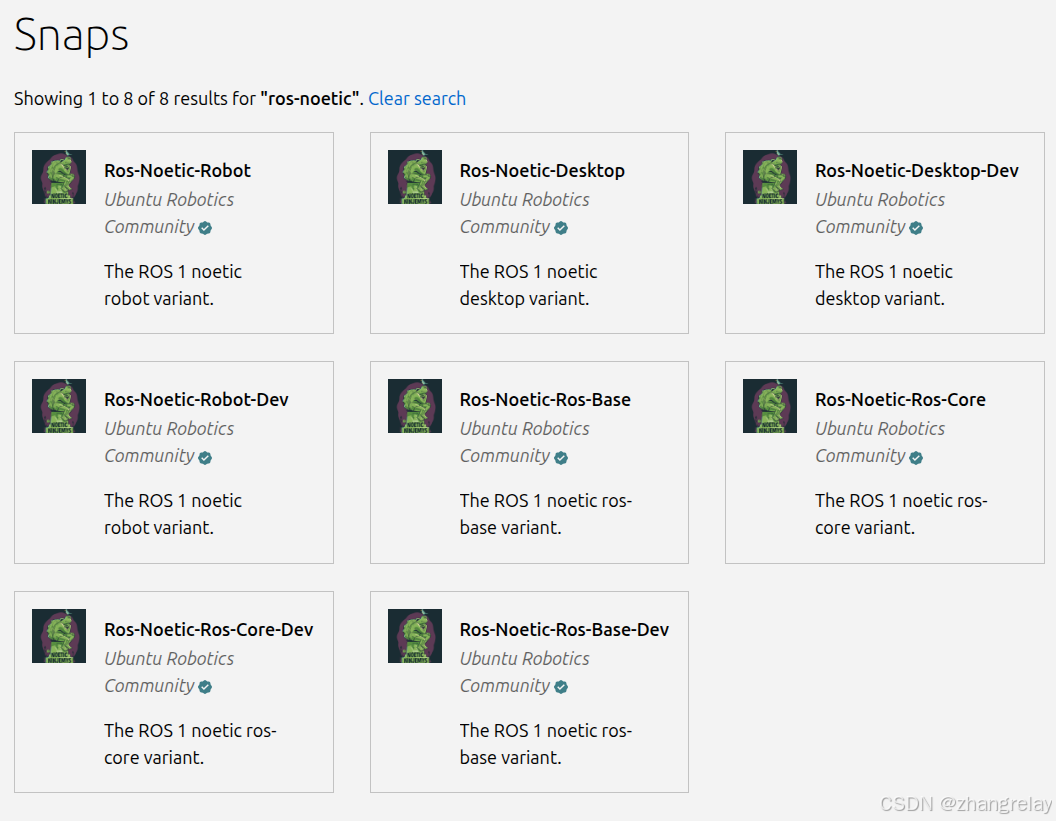
1. 安装官方 ROS Noetic Snap(公共仓库)
适用于无需私有部署、仅需基础 ROS Noetic 环境的场景:
bash
运行
# 安装 ROS Noetic Snap 核心包(--classic 模式适配 ROS 权限需求)
sudo snap install ros-noetic-desktop --classic
# 验证安装
snap list ros-noetic-desktop
# 输出示例:ros-noetic-desktop 1.0.0 canonical classic -2. 配置 Snap 环境变量
Snap 包运行在隔离环境中,需手动配置环境变量以正常使用 ROS 命令:
bash
运行
# 临时生效(当前终端)
source /snap/ros-noetic-desktop/current/opt/ros/noetic/setup.bash
# 永久生效(所有终端)- 将配置写入 .bashrc
echo "source /snap/ros-noetic-desktop/current/opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 验证环境
echo $ROS_VERSION
# 输出:1(表示 ROS 1)
echo $ROS_DISTRO
# 输出:noetic(表示 Noetic 版本)3. 基础功能测试
bash
运行
# 启动 ROS Master(新开终端)
roscore
# 另开终端,运行小海龟示例验证
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
# 若能看到小海龟窗口并通过方向键控制移动,说明环境正常四、进阶:私有 Dedicated Snap Store 部署(企业级)
适用于需要统一管理 ROS Noetic 版本、嵌入 Ubuntu Pro 令牌、离线 / 受限环境部署的团队。
1. 申请私有 Snap Store
- 联系 Canonical 机器人团队(https://ubuntu.com/robotics/contact),申请开通 Dedicated Snap Store;
- 获取私有仓库的访问凭证(API 密钥、仓库地址)。
2. 构建自定义 ROS Noetic Snap 包
步骤 1:准备 Snapcraft 配置文件(snapcraft.yaml)
yaml
name: ros-noetic-custom
version: '1.0'
summary: Custom ROS Noetic Snap with ESM support
description: |
ROS Noetic snap for Ubuntu 24.04 with Ubuntu Pro/ROS ESM integration.
base: core22 # 适配 Ubuntu 24.04 基础镜像
grade: stable
confinement: strict # 严格隔离模式,提升安全性
architectures:
- amd64 # 适配 x86_64 架构(机器人主流架构)
parts:
ros-noetic:
plugin: catkin
source: https://github.com/ros/ros.git
source-branch: noetic-devel
catkin-packages: [roscpp, rospy, turtlesim, rviz] # 按需添加所需包
build-packages:
- build-essential
- cmake
- python3-catkin-tools
- python3-rosdep
stage-packages:
- ros-noetic-ros-core
- ros-noetic-ros-base
# 嵌入 Ubuntu Pro 令牌(企业级)
hooks:
install:
command: |
echo "Attaching Ubuntu Pro token for ROS ESM"
pro attach <your-enterprise-token> # 替换为企业令牌
apps:
roscore:
command: opt/ros/noetic/bin/roscore
plugs: [network, network-bind] # 开放网络权限
turtlesim:
command: opt/ros/noetic/bin/turtlesim_node
plugs: [x11, network] # 开放图形界面+网络权限步骤 2:构建 Snap 包
bash
运行
# 安装 Snapcraft 工具
sudo snap install snapcraft --classic
# 构建自定义 Snap 包(需在 snapcraft.yaml 所在目录执行)
snapcraft build
# 生成的 Snap 包文件:ros-noetic-custom_1.0_amd64.snap步骤 3:发布到私有 Snap Store
bash
运行
# 登录私有仓库(替换 <your-api-key> 和 <store-url>)
snapcraft login --with <your-api-key> --store <store-url>
# 上传 Snap 包
snapcraft upload ros-noetic-custom_1.0_amd64.snap --release stable
# 从私有仓库安装
sudo snap install ros-noetic-custom --classic --store <store-url>3. 离线环境部署
-
将构建好的 Snap 包拷贝到离线设备;
-
安装离线包: bash
运行
sudo snap install --dangerous ros-noetic-custom_1.0_amd64.snap --classic -
手动嵌入 Ubuntu Pro 令牌(离线激活): bash
运行
sudo pro attach --offline <your-offline-token> # 离线令牌需从 Canonical 申请
五、常见问题与解决方案
1. Snap 包权限不足
现象:运行 rviz/gazebo 时提示权限错误。解决:
bash
运行
# 为 Snap 包添加图形界面权限
sudo snap connect ros-noetic-desktop:desktop
sudo snap connect ros-noetic-desktop:desktop-launch
sudo snap connect ros-noetic-desktop:x112. ROS ESM 未生效
现象:无法获取 Noetic 安全补丁更新。解决:
bash
运行
# 检查 Ubuntu Pro 状态
sudo pro status
# 确保 "ros-esm" 状态为 enabled
# 若未启用,执行:
sudo pro enable ros-esm
sudo snap refresh ros-noetic-desktop # 刷新 Snap 包获取更新3. 与系统原有 ROS 环境冲突
现象:环境变量混乱,rosversion 输出错误。解决:
bash
运行
# 清空原有 ROS 环境变量,仅保留 Snap 版本
unset ROS_ROOT ROS_PACKAGE_PATH
source /snap/ros-noetic-desktop/current/opt/ros/noetic/setup.bash4. 离线环境无法更新
解决:
-
在联网设备上下载更新包: bash
运行
sudo snap download ros-noetic-desktop --channel=stable -
将下载的
.snap文件拷贝到离线设备,执行:bash
运行
sudo snap ack ros-noetic-desktop_*.assert sudo snap install --dangerous ros-noetic-desktop_*.snap
六、总结
- 基础部署 :个人 / 小型团队直接通过公共 Snap 仓库安装
ros-noetic-desktop,配置环境变量即可快速使用,无需修改系统; - 企业级部署:通过私有 Dedicated Snap Store 构建自定义 Snap 包,嵌入 Ubuntu Pro 令牌,实现跨设备统一管理、离线部署和 ROS ESM 安全更新;
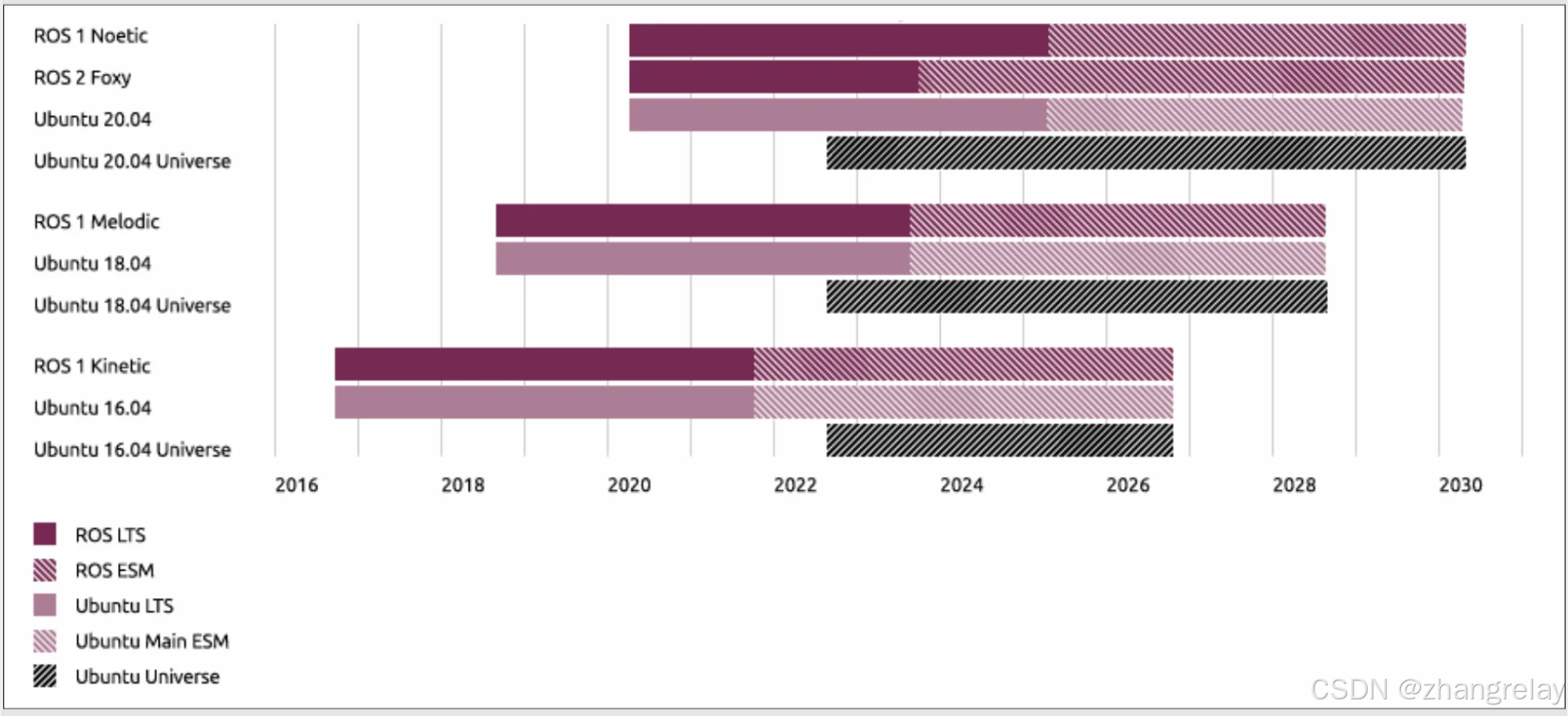
- 核心优势:Snap 包隔离性强,避免与 Ubuntu 24.04 系统依赖冲突,同时兼容 ROS ESM 服务,保障 Noetic 环境至 2030 年的安全与稳定性。
若需定制化支持(如适配特定机器人硬件、大规模集群管理),可直接联系 Canonical 机器人团队获取技术支持。
一、核心背景:ROS Noetic 正式退出历史舞台
2025 年 5 月,机器人操作系统(ROS)的最后一个 ROS 1 系列发行版 ROS Noetic Ninjemys 正式迎来生命周期终止(EOL)。该版本于 2020 年发布,专为 Ubuntu 20.04 LTS 系统打造,多年来一直是数千名开发者构建机器人应用的默认选择,广泛应用于工业机器人、自动驾驶、学术研究等关键场景。
对依赖 ROS Noetic 运行核心业务系统的开发者和企业而言,EOL 意味着两大关键变化:
- 上游支持终止:ROS 官方不再提供新功能开发、安全补丁更新和漏洞修复;
- 合规与安全风险:运行未受支持的软件可能违反企业网络合规要求(如欧盟《网络弹性法案》CRA),且设备易受未修复漏洞攻击,引发稳定性故障或数据安全问题。
二、解决方案:Canonical 的 ROS ESM 延长支持服务
为解决 ROS Noetic 用户的 "过渡期困境",Canonical(Ubuntu 官方母公司)将其纳入 ROS ESM(Extended Security Maintenance,延长安全维护)服务 。这一服务专为已终止上游支持的 ROS 发行版设计,此前已覆盖 Kinetic、Melodic、Foxy 等版本,如今正式新增 Noetic 支持,核心价值是:在 ROS 官方支持结束后,额外提供长达 5 年的安全与关键修复支持,与 Ubuntu 20.04 LTS 的延长维护周期保持一致,直至 2030 年。
ROS ESM 的核心保障内容
作为 Ubuntu Pro 订阅服务的一部分,ROS ESM 为 Noetic 用户提供以下关键能力:
| 支持类型 | 具体内容 |
|---|---|
| 安全更新 | 针对 ROS Noetic 核心包的 CVE(常见漏洞与暴露)补丁回溯、高危安全漏洞修复 |
| 稳定性保障 | 关键 Bug 修复、兼容性优化,避免因未修复问题导致的系统崩溃 |
| 长期支持 | 明确支持至 2030 年,与 Ubuntu 20.04 LTS ESM 周期同步,无需仓促迁移 |
| 全面包覆盖 | - Ubuntu Main 仓库:2300 + 个包,EOL 后支持 5 年- Ubuntu Universe 仓库:23000 + 个包,自发布起支持 10 年- ROS 生态:覆盖 ROS 1(Kinetic/Melodic/Noetic)和 ROS 2(Foxy)的 600 + 个核心包 |
| 企业级工具 | 含 Landscape 设备集群管理工具、Kernel Livepatch(无需重启即可应用内核补丁)、FIPS/CIS 安全认证、实时内核(适配低延迟场景)等 |
| 技术支持 | 24/7 全天候支持,覆盖数千个开源包,适配大规模部署场景 |
订阅权益说明
- 个人用户:Ubuntu Pro 免费使用,可直接享受 ROS ESM 服务;
- 企业用户:提供面向设备制造商的定制化定价模型,支持商业级部署与技术保障。
三、三种落地方式:零干扰衔接,最小化业务影响
ROS ESM 的设计核心是 "不破坏现有环境、低成本接入",用户可根据自身部署场景选择以下三种方式:
1. 原生环境直接接入(推荐现有 Ubuntu 20.04+Noetic 用户)
- 操作逻辑:启用 Ubuntu Pro 后,通过专属 PPA(个人软件包归档)接收更新,无需修改现有代码、配置或应用架构;
- 灵活选项:可选择仅接收 "安全补丁"(优先保障稳定性),或同时接收 "安全补丁 + 关键 Bug 修复"(平衡稳定性与体验);
- 核心优势:零开发成本,无缝衔接现有工作流,为后续迁移争取充足时间。
2. Docker 容器环境支持(容器化部署用户)
ROS ESM 完全适配容器化场景,关键特性:
- 安全嵌入令牌:通过 Docker BuildKit 和 "密钥挂载" 机制,将 Ubuntu Pro 令牌安全嵌入镜像,避免令牌泄露;
- 无格式依赖:无需修改容器打包格式,即可在构建和运行阶段获取 ROS ESM 更新;
- 适用场景:大规模容器分发、跨环境部署的工业机器人或云原生机器人应用。
参考:官方提供详细指南,指导如何在 Docker 中启用 Ubuntu Pro 服务;企业级大规模部署可联系 Canonical 获取令牌管理支持。
3. Snap 打包部署(适配 Ubuntu 24.04 等新版本用户)
Canonical 将 ROS Noetic 封装为Snap 包(一种跨 Ubuntu 版本的通用打包格式),核心优势:
- 环境解耦:ROS Noetic 应用与底层 OS 版本分离,可在 Ubuntu 24.04 LTS 等新版本上稳定运行;
- 安全隔离:严格的沙箱机制提升系统安全性,避免应用与 OS 冲突;
- 灵活管理:支持私有专属 Snap 仓库,可嵌入 Ubuntu Pro 令牌,适配受限网络或离线环境,便于集群化部署与升级。
四、关键建议:谁需要立即行动?
- 生产环境用户:工业机器人、自动驾驶车辆、医疗机器人等 "任务关键型系统" 用户,需优先启用 ROS ESM,避免因安全漏洞或稳定性问题导致停产、事故;
- 合规要求严格的企业:需满足 CRA、ISO 等合规标准的用户,ROS ESM 是避免合规处罚的关键手段;
- 大规模设备集群管理者:通过 Landscape 工具可统一管理所有 ROS Noetic 设备的更新与补丁,降低运维成本;
- 暂无法迁移的用户:机器人代码库庞大、迁移成本高(需处理依赖变更、字段召回、稳定性重验证等)的团队,可通过 ROS ESM 争取 5 年缓冲期,从容规划向 ROS 2(如 Humble/Iron)的迁移。
五、行动指南:如何启用 ROS ESM?
- 访问 Ubuntu Pro 官方页面(Ubuntu Pro overview)了解订阅详情;
- 个人用户直接启用 Ubuntu Pro,通过专属 PPA 接收 ROS Noetic 更新;
- 企业用户可联系 Canonical 机器人团队,获取定制化部署方案(如大规模设备管理、私有 Snap 仓库搭建、Docker 令牌嵌入指导等);
- 参考官方文档:ROS ESM 详细配置指南、Docker 环境启用教程、Snap 包使用说明。
总结
ROS Noetic 的 EOL 并非 "终点",而是 "平稳过渡的起点"。Canonical 的 ROS ESM 服务通过 "延长支持 + 零干扰接入 + 多场景适配",解决了用户的核心痛点:既保障了现有系统的安全与合规,又避免了仓促迁移带来的业务中断和成本浪费。
对依赖 ROS Noetic 的用户而言,立即启用 ROS ESM 是当前最优选择 ------ 既能维持业务连续性,又能在未来 5 年内从容规划向 ROS 2 的迁移,实现 "安全过渡 + 长期创新" 的双重目标。如需进一步了解,可访问 ROS ESM 官方页面、查阅文档或直接联系 Canonical 技术团队。