文章目录
- 前言
- [一、 矩阵分析与基础运算](#一、 矩阵分析与基础运算)
-
- [1. `det(A)` ------ 行列式计算](#1.
det(A)—— 行列式计算) - [2. `rank(A)` ------ 矩阵的秩](#2.
rank(A)—— 矩阵的秩) - [3. `eig(A)` ------ 特征值与特征向量](#3.
eig(A)—— 特征值与特征向量) - [4. `expm(A)` ------ 矩阵指数运算](#4.
expm(A)—— 矩阵指数运算)
- [1. `det(A)` ------ 行列式计算](#1.
- [二、 方程求解(线性与矩阵方程)](#二、 方程求解(线性与矩阵方程))
-
- [5. `\` (左除运算符) ------ 求解线性方程组](#5.
\(左除运算符) —— 求解线性方程组) - [6. `lyap(A, Q)` ------ 求解 Lyapunov 方程](#6.
lyap(A, Q)—— 求解 Lyapunov 方程) - [7. `fsolve` ------ 数值求解非线性方程组](#7.
fsolve—— 数值求解非线性方程组)
- [5. `\` (左除运算符) ------ 求解线性方程组](#5.
- [三、 微分方程数值解 (ODE)](#三、 微分方程数值解 (ODE))
-
- [8. `ode45` ------ 常微分方程求解器](#8.
ode45—— 常微分方程求解器) -
-
- [9. `ode15s` ------ 刚性微分方程求解器](#9.
ode15s—— 刚性微分方程求解器)
- [9. `ode15s` ------ 刚性微分方程求解器](#9.
-
- [8. `ode45` ------ 常微分方程求解器](#8.
- [四、 最优化问题](#四、 最优化问题)
-
- [10. `fmincon` ------ 带约束的非线性最小化](#10.
fmincon—— 带约束的非线性最小化) - [11. `lsqcurvefit` ------ 非线性最小二乘拟合](#11.
lsqcurvefit—— 非线性最小二乘拟合)
- [10. `fmincon` ------ 带约束的非线性最小化](#10.
- [五、 拉普拉斯变换](#五、 拉普拉斯变换)
-
- [12. `laplace` / `ilaplace` ------ 符号变换](#12.
laplace/ilaplace—— 符号变换)
- [12. `laplace` / `ilaplace` ------ 符号变换](#12.
- 学习核心建议:
前言
欢迎进入第三章:科学运算问题的MATLAB求解。前面第一章和第二章我们学习MATLAB与simulink的基本入门以及各种基础函数,这节课我们进入系统阐述的科学运算问题的MATLAB求解,如果没有学过前两篇博客的话,可以直接开始,也可以通过系列的链接进入第一章和第二章的博客进行学习。
如果说第一章是带你"看房子",那么第二章就是教你"打地基"。那本章就是真正运用这些东西来做实实在在的解决一些问题。接下来我们开始:
一、 矩阵分析与基础运算
1. det(A) ------ 行列式计算
-
功能与用处:计算方阵的行列式,常用于判定矩阵是否可逆(非零则可逆)。
-
输入输出 :输入为方阵
A;返回标量。 -
代码示例 :
matlabA = [1 2; 3 4]; d = det(A); disp(['行列式结果: ', num2str(d)]); -
源码讲解 :直接调用内置函数计算。输出结果为
1*4 - 2*3 = -2。 -
预期输出 :
行列式结果: -2
2. rank(A) ------ 矩阵的秩
-
功能与用处 :求矩阵的秩,在控制理论中用于判定系统的可控性 和可观测性。
-
输入输出 :输入矩阵
A;返回整数秩。 -
代码示例 :
matlabA = [1 2; 2 4]; % 第二行是第一行的两倍,秩应为1 r = rank(A); disp(['矩阵的秩为: ', num2str(r)]); -
源码讲解:该函数通过SVD分解计算非零奇异值的个数。
-
预期输出 :
矩阵的秩为: 1
3. eig(A) ------ 特征值与特征向量
-
功能与用处 :计算矩阵的特征值,在控制系统中特征值直接对应系统的极点,决定稳定性。
-
输入输出 :输入方阵
A;返回特征值向量V或特征向量阵X与特征值对角阵D。 -
代码示例 :
matlabA = [0 1; -2 -3]; [X, D] = eig(A); % X是特征向量,D对角线上是特征值 disp('特征值对角阵 D:'); disp(D); -
源码讲解 :对于线性系统 x ˙ = A x \dot{x}=Ax x˙=Ax,特征值即系统的自然频率/极点。此处结果为 -1 和 -2。
-
预期输出 :
D = [-1 0; 0 -2]
4. expm(A) ------ 矩阵指数运算
-
功能与用处 :计算矩阵指数 e A e^{A} eA,是求解状态转移矩阵 Φ ( t ) = e A t \Phi(t) = e^{At} Φ(t)=eAt 的核心函数。
-
输入输出 :输入方阵
A;返回同维矩阵。 -
代码示例 :
matlabA = [0 1; -2 -3]; Phi = expm(A * 0.5); % 计算 t=0.5 秒时的状态转移矩阵 disp('状态转移矩阵 Phi:'); disp(Phi); -
源码讲解 :注意 :
expm是矩阵幂级数运算,而exp是对每个元素单独求幂。在控制工程中必须使用expm。 -
预期输出 :一个 2 × 2 2 \times 2 2×2 的数值矩阵。
二、 方程求解(线性与矩阵方程)
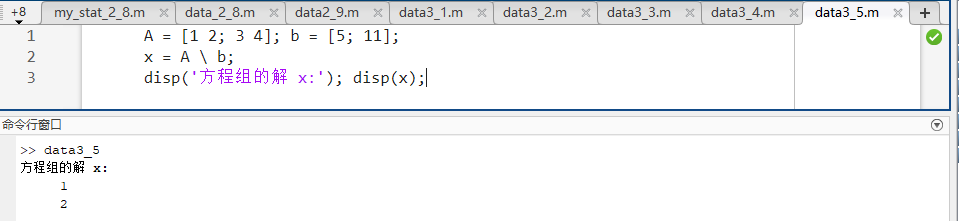
5. \ (左除运算符) ------ 求解线性方程组
-
功能与用处 :求解 A x = b Ax = b Ax=b,是计算系统平衡点最快捷的方法。
-
输入输出 :输入系数阵
A和常数项b;返回解向量x。 -
代码示例 :
matlabA = [1 2; 3 4]; b = [5; 11]; x = A \ b; disp('方程组的解 x:'); disp(x); -
源码讲解 :MATLAB 内部根据 A 的性质自动选择 LU 分解或 QR 分解,比
inv(A)*b更稳定高效。 -
预期输出 :
x = [1; 2]
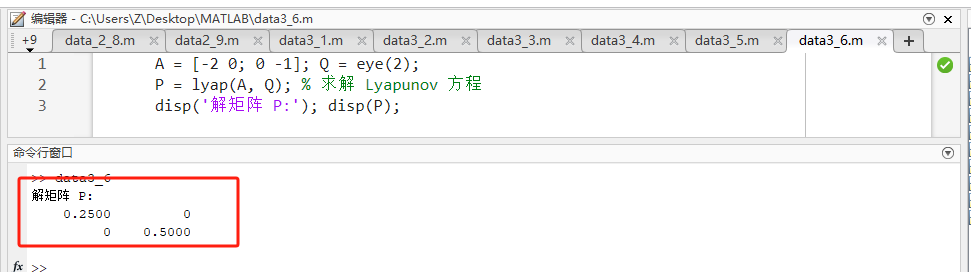
6. lyap(A, Q) ------ 求解 Lyapunov 方程
-
功能与用处 :求解 A X + X A T + Q = 0 AX + XA^T + Q = 0 AX+XAT+Q=0,用于线性系统的稳定性分析。
-
输入输出 :输入系统阵
A和对称阵Q;返回解矩阵X。 -
代码示例 :
matlabA = [-2 0; 0 -1]; Q = eye(2); P = lyap(A, Q); % 求解 Lyapunov 方程 disp('解矩阵 P:'); disp(P); -
源码讲解 :如果 A A A 是稳定的(特征值均有负实部),且 Q Q Q 正定,则 P P P 必正定。
-
预期输出 :
P = [0.25 0; 0 0.5]
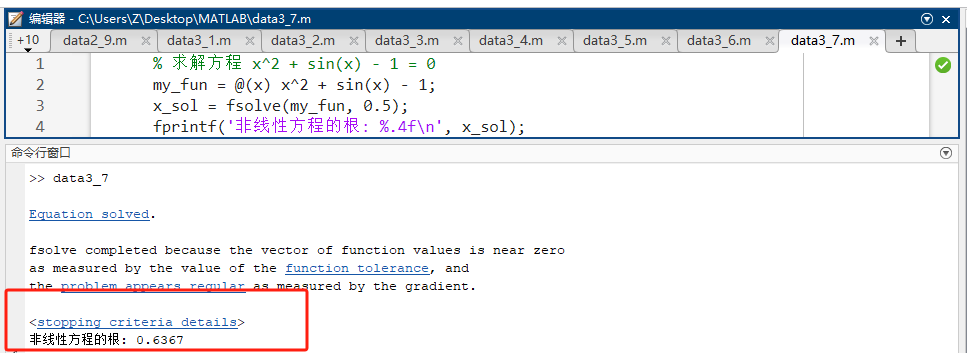
7. fsolve ------ 数值求解非线性方程组
-
功能与用处 :寻找非线性函数 f ( x ) = 0 f(x)=0 f(x)=0 的数值根,用于非线性控制系统的平衡点计算。
-
输入输出 :输入匿名函数句柄和初值
x0;返回解x。 -
代码示例 :
matlab% 求解方程 x^2 + sin(x) - 1 = 0 my_fun = @(x) x^2 + sin(x) - 1; x_sol = fsolve(my_fun, 0.5); fprintf('非线性方程的根: %.4f\n', x_sol); -
源码讲解:使用拟牛顿法迭代,非常依赖初值的选取。
-
预期输出 :
非线性方程的根: 0.6367
三、 微分方程数值解 (ODE)
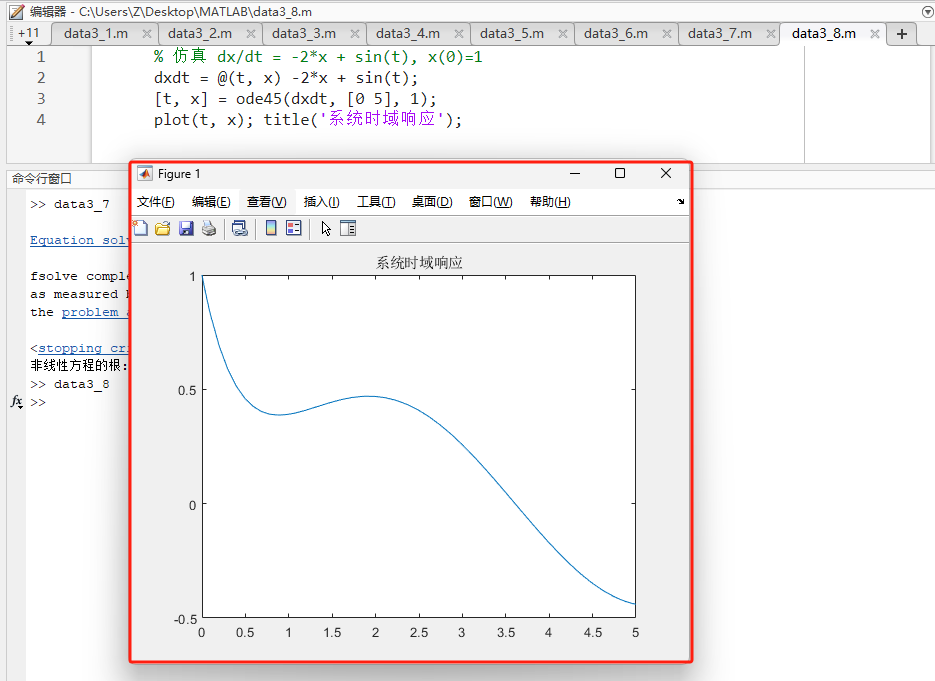
8. ode45 ------ 常微分方程求解器
-
功能与用处 :最通用的微分方程数值解函数,用于时域系统仿真。
-
输入输出 :输入方程句柄
f(t,x)、时间范围[t0 tf]、初值x0;返回时间点t和状态值x。 -
代码示例 :
matlab% 仿真 dx/dt = -2*x + sin(t), x(0)=1 dxdt = @(t, x) -2*x + sin(t); [t, x] = ode45(dxdt, [0 5], 1); plot(t, x); title('系统时域响应'); -
源码讲解:采用变步长的 4-5 阶龙格-库塔法(Runge-Kutta),在精度和速度间取得平衡。
-
预期输出 :一段平滑下降并随正弦波波动的曲线图。
9. ode15s ------ 刚性微分方程求解器
-
功能与用处:求解"刚性"(Stiff)方程,即系统中同时存在极快和极慢动态的情形。
-
输入输出 :参数同
ode45。 -
代码示例 :用于某些极高增益的控制系统仿真,当
ode45运行极慢或报错时,换用此函数。 -
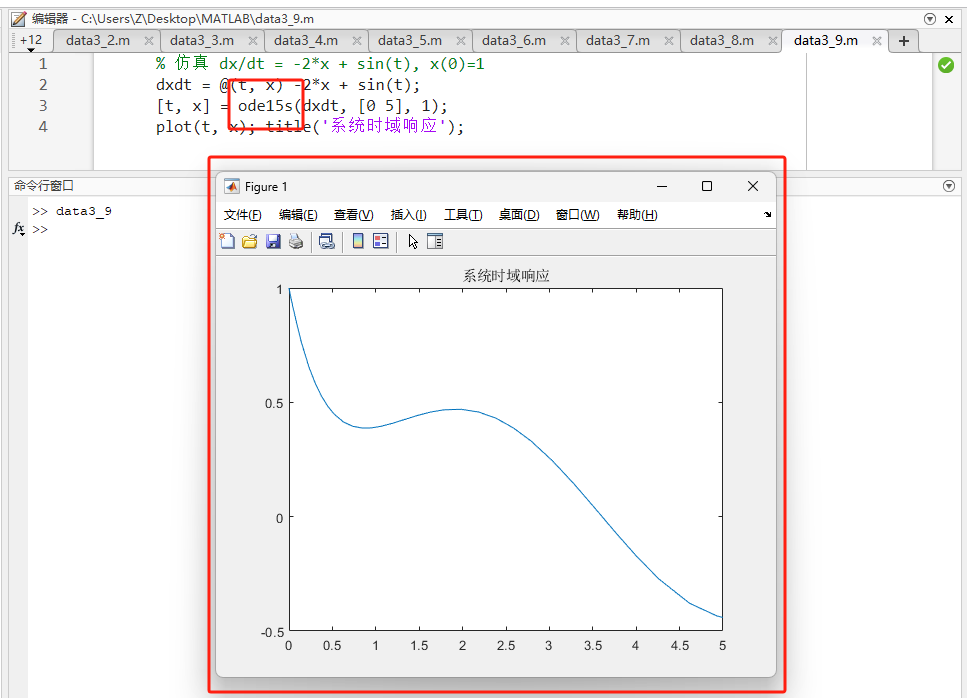
代码示例 :
matlab% 仿真 dx/dt = -2*x + sin(t), x(0)=1 dxdt = @(t, x) -2*x + sin(t); [t, x] = ode15s(dxdt, [0 5], 1); plot(t, x); title('系统时域响应'); -
源码讲解:采用变步长的 4-5 阶龙格-库塔法(Runge-Kutta),在精度和速度间取得平衡。
-
预期输出 :一段平滑下降并随正弦波波动的曲线图。
四、 最优化问题
10. fmincon ------ 带约束的非线性最小化
-
功能与用处 :在给定的约束下寻找函数极小值,控制系统中用于性能指标优化(如 PID 调优)。
-
输入输出:目标函数、初值、线性/非线性约束;返回最优参数。
-
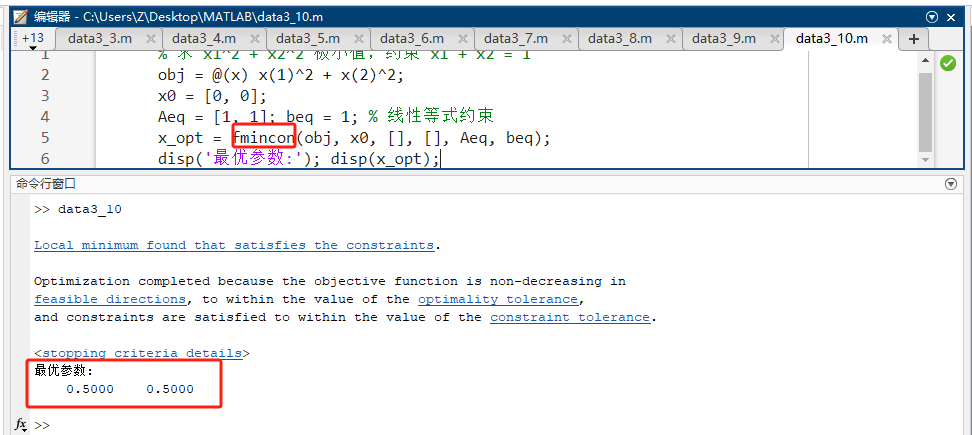
代码示例 :
matlab% 求 x1^2 + x2^2 极小值,约束 x1 + x2 = 1 obj = @(x) x(1)^2 + x(2)^2; x0 = [0, 0]; Aeq = [1, 1]; beq = 1; % 线性等式约束 x_opt = fmincon(obj, x0, [], [], Aeq, beq); disp('最优参数:'); disp(x_opt); -
源码讲解:这是工程中最强大的优化工具,可以处理复杂的边界和约束。
-
预期输出 :
最优参数: [0.5 0.5]
11. lsqcurvefit ------ 非线性最小二乘拟合
-
功能与用处 :根据实验数据拟合模型参数,常用于系统辨识。
-
输入输出 :模型函数、待定参数初值、样本数据 x , y x, y x,y;返回拟合参数。
-
代码示例 :
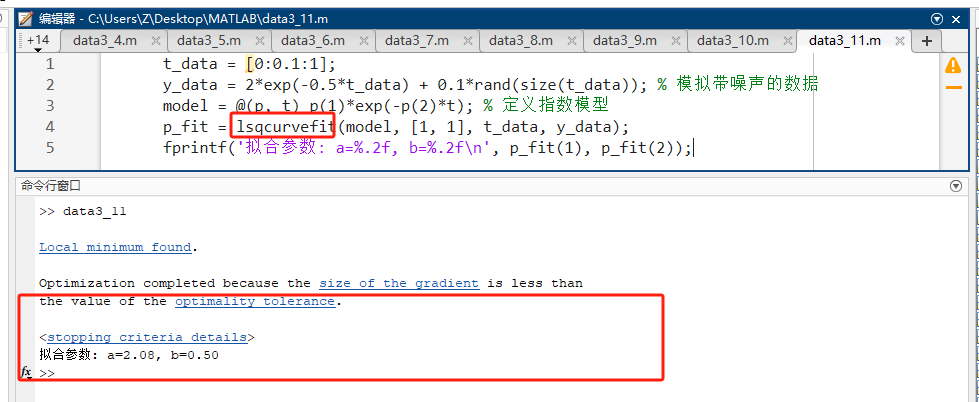
matlabt_data = [0:0.1:1]; y_data = 2*exp(-0.5*t_data) + 0.1*rand(size(t_data)); % 模拟带噪声的数据 model = @(p, t) p(1)*exp(-p(2)*t); % 定义指数模型 p_fit = lsqcurvefit(model, [1, 1], t_data, y_data); fprintf('拟合参数: a=%.2f, b=%.2f\n', p_fit(1), p_fit(2)); -
源码讲解 :寻找使误差平方和最小的参数
p。 -
预期输出 :
拟合参数: a=2.0x, b=0.5x(接近真实值)。
五、 拉普拉斯变换
12. laplace / ilaplace ------ 符号变换
-
功能与用处 :在时域表达式和 s s s 域传递函数之间进行解析转换。
-
输入输出:符号表达式;返回变换后的符号结果。
-
代码示例 :
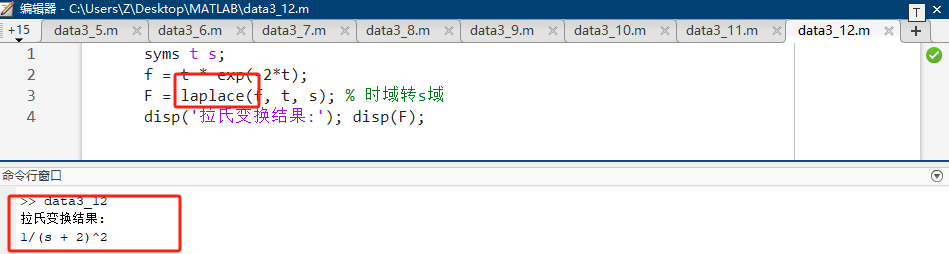
matlabsyms t s; f = t * exp(-2*t); F = laplace(f, t, s); % 时域转s域 disp('拉氏变换结果:'); disp(F); -
源码讲解:基于符号计算引擎,给出的结果是代数式而非数值。
-
预期输出 :
1/(s + 2)^2
学习核心建议:
- 区分数值与符号 :
fsolve(数值解)和solve(符号解)用法完全不同,控制系统仿真多用数值解。 - 句柄使用 :掌握
@(变量) 表达式这种写法,它是调用ode45等高级函数的通行证。 - 矩阵方程 :在现代控制理论中,
lyap和care(求解 Riccati 方程)比手动推导公式重要得多。
当你掌握了这些数学工具,第四章我们将开始正式构建控制系统的传递函数和状态空间模型。准备好继续了吗?