title: 2026-01-13-论文阅读-AdvancesUavAvionics
date: 2026-01-13
tags:
- 论文阅读
- 无人机(UAVs)
- 综述论文
《Advances in UAV Avionics Systems Architecture, Classification and Integration: A Comprehensive Review and Future Perspectives》
一、论文基本信息
关键词:无人驾驶飞行器/无人机,导航与控制,路径规划与避障,识别系统。
二、研究背景与问题定义
这篇综述覆盖了通讯,算法,能源,政策等多个方面,我们主要从通讯和算法视角来看,重点关注文中通信、识别、感知导航、规划控制、电子战及数据总线这六个部分。
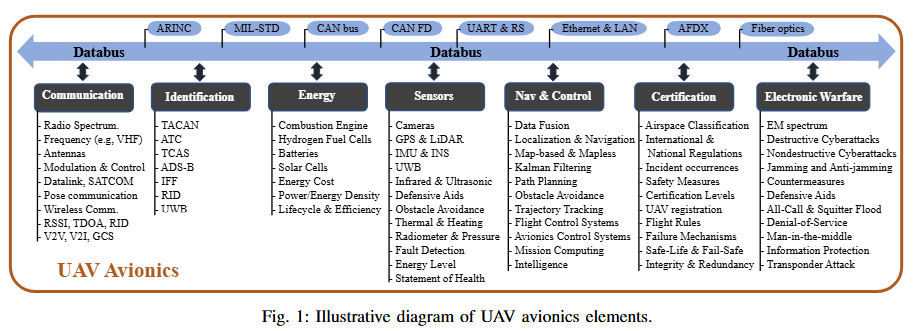
无人机航空电子系统的八大核心支柱(7+1Databus)
1. 研究背景
- 物理层的强约束机制 :算法不再运行于理想算力平台。数据总线(Databus)的物理带宽和识别系统(Identification)的强制协议频率,为感知与控制算法划定了采样与反馈的硬性上限。
- 协同范式的通信依赖 :任务目标由单机避障向多机协同(Swarm)演进。这意味着通信链路(Communication)不再只是传输工具,而是算法状态机的一部分,其时延分布和丢包模式直接决定了群体一致性算法的收敛阈值。
- 对抗环境下的生存法则 :在电子战(EW)频发的背景下,算法鲁棒性被重新定义。它要求导航算法在物理层观测(GPS)受损时,必须具备利用多传感一致性检验进行逻辑降级与自愈的能力。
2. 问题定义
- 感知导航(Perception & Navigation):多模态融合与退化处理
- 时空对齐矛盾:异构传感器(如高频 IMU 与低频 RGB-D)在微秒级时间戳对齐与空间外参动态补偿上的精度缺失,是导致状态估计器(EKF/UKF/随机滤波)发散的首要诱因。
- 场景稳健性 :在长走廊(几何特征退化)或强光/弱光(视觉特征消失)场景下,算法如何通过动态调整观测权重,保证定位系统不陷入不可观测状态。
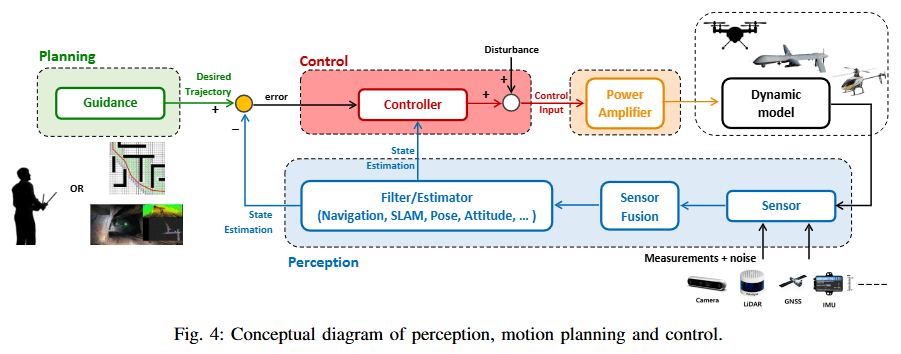
规划层(规划轨迹),感知层(处理原始输出),控制层(对抗干扰,控制无人机)
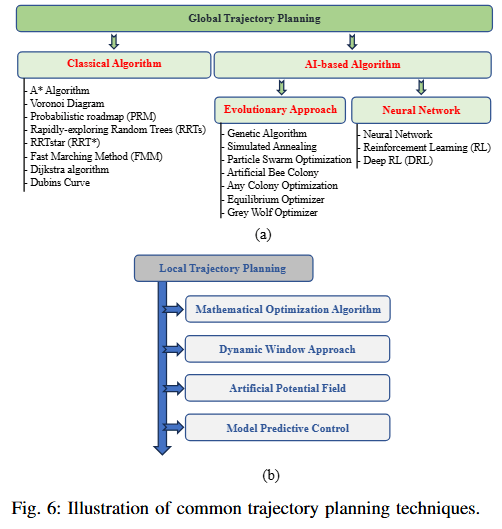
一些寻路算法,全局规划:查"离线知识地图",局部规划,反应快,针对突发情况
-
规划控制(Planning, Control & Avoidance):高维寻优与执行边界
- 实时性博弈:3D 路径规划本质是带约束的 NP-Hard 问题。算法核心矛盾在于如何在毫秒级时间内,在"轨迹可飞性(动力学约束)"与"计算开销"之间找到最优折中。
- 控制稳定性裕度 :在避障等高动态机动中,控制算法如何应对气动干扰与传感器噪声的联合冲击,确保在接近飞行包线边缘时依然具备确定的稳定域。
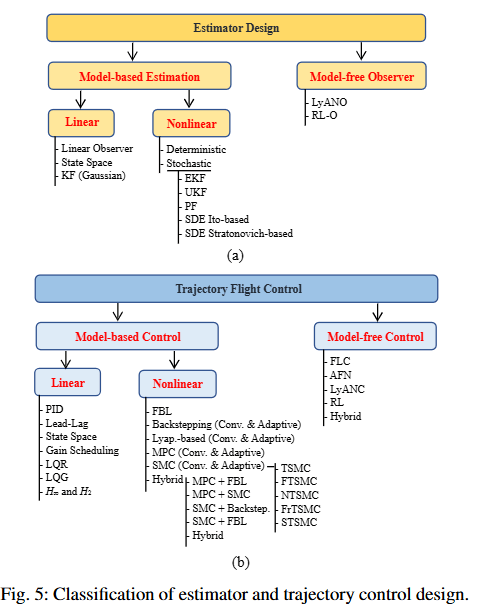
常见的估计器分类和轨迹控制设计
Estimator(估计器),将不可靠的传感数据变可用
Model-base:基于公式方程的算法,Model-free:基于训练的算法
-
通信识别(Comm & Identification):链路抖动与身份可信度
- 传输确定性:高速飞行引发的多径效应和信道快速时变,如何在算法层通过前向纠错或自适应调度,降低对飞行控制闭环的影响。
- 合规与安全融合 :远程识别(RID)要求广播真实位姿,这与算法安全、任务隐私存在冲突。如何在满足 ADS-B/RID 法规的前提下,实现身份信息的加密验证与抗防伪仿冒。
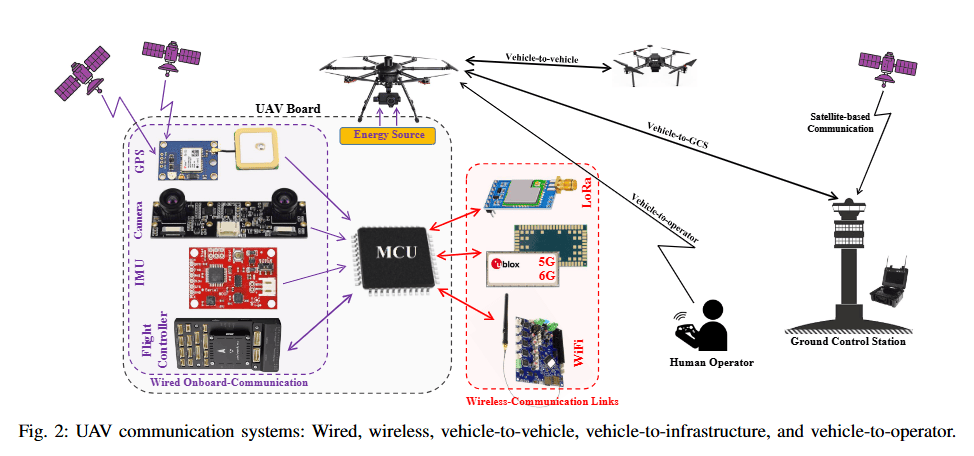
无人机如何通过海陆空各种手段把数据传出去
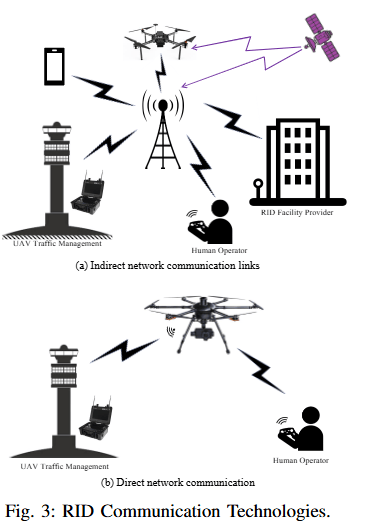
(a) 间接网络(上云端), (b) 直接广播(喊话式)
-
电子对抗(Electronic Warfare):异常检测与降级容错
- 欺骗检测算法 :针对 GPS 欺骗,算法需具备基于多传感器交叉校验(Cross-check)的异常检测逻辑,在坐标发生逻辑漂移时,能够自动识别并平滑切换至视觉/惯性等相对导航模式。
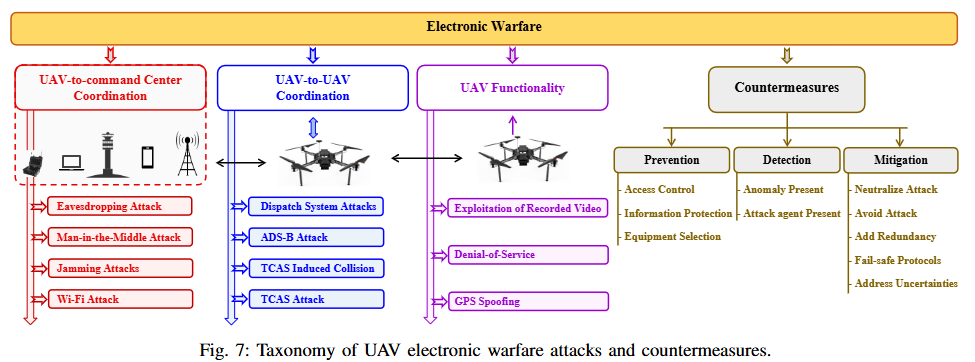
攻击层面:指令,机群关系,无人机本机
防御层面:预防,检测,临时切换
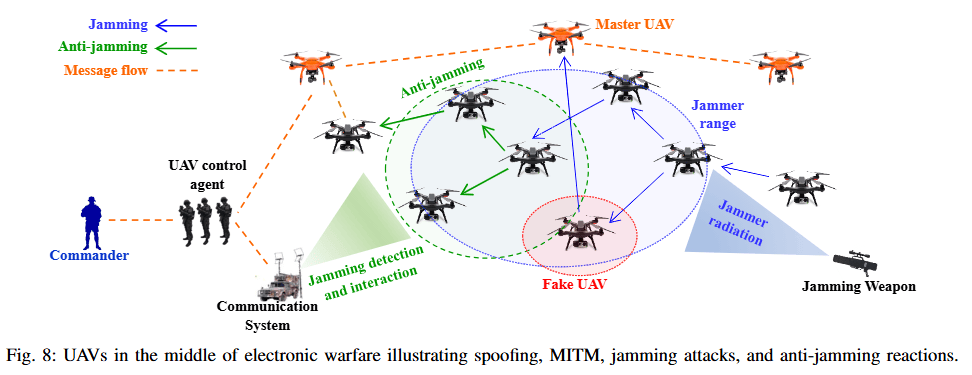
干扰与反干扰,欺骗攻击,中间人攻击,指令检验
- 欺骗检测算法 :针对 GPS 欺骗,算法需具备基于多传感器交叉校验(Cross-check)的异常检测逻辑,在坐标发生逻辑漂移时,能够自动识别并平滑切换至视觉/惯性等相对导航模式。
-
数据总线(Databus):端到端时序保证
- 协议层抖动(Jitter):在 CAN/1553B 等共享总线上,大量传感器数据涌入导致的带宽争用和排队延迟,会直接侵入控制器的反馈环路。算法层面需通过"任务优先级编排"与"时间触发调度",将总线延迟纳入算法设计的稳定性评估模型中。
三、系统架构与技术路线分类
A. 状态估计与感知导航流派 (Perception & Navigation)
论文将感知定位算法按处理非线性和噪声的方式分为两大演进路线,并强调了多传感器融合 (Sensor Fusion) 是实现高精度的唯一途径。
- 确定性估计器 (Deterministic):主要包含线性观察器与非线性互补滤波,假设观测质量极高,主要用于简单的姿态估计。
- 随机估计器 (Stochastic) :
- 主流线性/拟线性:KF (Kalman Filter)、用于处理非线性的 EKF (一阶线性化) 与 UKF (无损变换)。
- 高阶非线性 :粒子滤波 (PF) 以及论文推崇的基于随机微分方程 (SDE) 的伊藤 (Ito) 与 斯特拉托诺维奇 (Stratonovich) 滤波。这类算法在处理高动态、非高斯噪声时比 EKF 具备更强的鲁棒性。
- 空间表述流派 :对比了有图导航 (Map-based) 与以 SLAM (同时定位与建图) 为核心的无图导航 (Mapless),后者是具身智能自主性的关键。
B. 规划控制与避障算法体系 (Planning, Control & Avoidance)
论文详细梳理了从轨迹生成到动力学执行的算法层级:
- 路径规划层 :
- 经典/几何类:A*、Voronoi 图、概率路网 (PRM) 及快速探索随机树 (RRT/RRT*)。
- 启发式/AI类:遗传算法 (GA)、粒子群算法 (PSO) 及深度强化学习 (DRL)。
- 碰撞规避层 :分为反应式 (Reactive) 和 审议式 (Deliberative) 策略。算法实现包括人工势场法 (APF)、动态窗口法 (DWA) 和基于几何/优化(如感知避障联动)的算法。
- 执行控制层 :
- 线性设计:PID (增益调度型是工业标准)、LQR/LQG (最优控制)。
- 非线性设计:反馈线性化 (FBL)、反步法 (Backstepping)、滑动阵列控制 (SMC) 及模型预测控制 (MPC)。其中 MPC 因其能处理状态/输入约束而被视为高级机动任务的首选。
C. 通信调制与识别定位算法 (Comm & Identification)
- 调制与链路算法:涵盖 QPSK、OFDM、MQAM 等数字调制技术。算法核心在于利用调制降低信号波长需求,并在高机动背景下最小化多径干扰。
- 识别定位算法:详细分类了基于信号特征的追踪算法,包括 RSSI (信号强度)、TDOA (到达时间差) 以及单脉冲 (Monopulse) 角追踪。
D. 电子战三级防御逻辑 (Electronic Warfare)
防御架构不再是单一的防火墙,而是被设计为一种算法闭环:
- 检测算法 (Detection):侧重于异常模式识别,通过监测射频特征、流量统计或飞行轨迹偏差来发现潜在攻击。
- 预防与缓解 (Prevention & Mitigation):涉及加密认证算法以及任务降级算法(Fail-safe),例如在检测到 GPS 欺骗后自动触发向视觉惯性里程计 (VIO) 的逻辑切换。
E. 机载数据总线调度标准 (Databus)
数据总线为算法定义了"通信延迟"和"同步精度":
- MIL-STD-1553B:基于命令/响应机制,为关键指令(如控制输出)提供高度确定的时间槽位。
- CAN / CAN FD:基于优先级的非破坏性逐位仲裁机制。CAN FD 增加了数据场长度(最高 64 字节),极大缓解了复杂感知数据在总线上的传输拥塞。
换一种更具技术深度 且符合研发逻辑的表达方式,将"挑战"与"方向"进行配对,重点突出算法在系统中的演进趋势:
四、关键挑战与未来方向
1. 机载资源极限约束下的算法权衡
- 感知(SLAM/语义分割)、规划(高维寻优)与安全(实时加密)算法的复杂度,与无人机有限的 SWaP(尺寸、重量与功耗)资源之间的矛盾。
- 技术突破 :
- 计算卸载架构 :从"孤立计算"转向 Edge/Fog Computing(边缘/雾计算),实现任务在云-边-端之间的动态分配。
- 硬件协同设计:开发基于 FPGA 或专用加速器的低功耗神经网络推理算法,解决"高性能模型无法上机"的问题。
| 层级 | 比喻 | 角色 | 响应速度 |
|---|---|---|---|
| 终端 (无人机) | 双手 | 负责最基础的动作(如保持平衡、电机转动)。 | 瞬时(毫秒级) |
| 雾计算 (Fog) | 局部神经丛 | 处理需要快速反应的复杂任务(如看到障碍物立即刹车、多机避障协同)。 | 极快 |
| 云计算 (Cloud) | 大脑核心 | 处理需要海量信息、不急于一秒完成的任务(如全局路线规划、长期能效分析、历史数据存档)。 | 较慢 |
2. 弱约束/退化环境下的感知韧性
- 多传感器融合算法在极端照明、低纹理、强电磁干扰下的可观测性丧失,导致定位系统产生不可恢复的漂移。
- 技术突破 :
- 自适应容错估计:开发具备故障管理与冗余架构的滤波器,在检测到传感信号异常(信号截断或跳变)时执行降级逻辑。
- 通感一体化 (ISAC):利用 6G 信号实现通信与感知的联合设计,弥补激光雷达或视觉传感器在恶劣天候下的不足。
3. 网络化机群的算法安全性与隐私
- 传统导航与控制算法假设输入数据是"诚实"的。但在电子战环境下,GPS 欺骗与中间人攻击会导致算法产生"逻辑上的自杀行为"。
- 技术突破 :
- 分布式信任机制 :引入 Blockchain(区块链) 技术确保机群通信的完整性,解决 ADS-B/RID 的易伪造问题。
- 对抗性鲁棒学习:研究在攻击信号存在下的增强学习控制律,提升系统在遭遇干扰时的存活率。
4. 动态任务下的群体协同演进
- 大规模机群协同中,中心化调度带来的计算瓶颈与分布式控制带来的不一致性风险。
- 技术突破 :
- 博弈论驱动路由 :利用 Game Theory(博弈论) 优化无人机群的资源分配、能量管理与协同路径规划。
- 联邦学习 (FL):在不泄露原始数据的前提下,实现跨机群的联合模型训练,解决样本数据稀缺问题。
五、我的思考
-
无人机也可以看作一种具身智能,具身智能中的多agent协同的思路可以和无人机机群协同相互参考
-
算法的性能上界其实是由底层航电架构决定的。例如,机载数据总线(Databus)的确定性时延直接决定了控制律的稳定。未来的算法研发,可以将"总线抖动、链路丢包、算力功耗"等物理约束作为先验条件引入仿真模型。
-
目前的避障和导航算法大多基于"数据来源诚实"的假设,但从现实应用中考虑,这是不可行的。要在逻辑层面具备"证伪"能力,越是通用的模型,其安全性越不可忽视。
-
论文提到感知系统在极端环境(强光、稀疏纹理)下的失效挑战,算法不应追求单一模态的极致,应建立类似航电系统中的"失效保护(Fail-safe)"机制。当视觉 SLAM 置信度下降时,算法应能主动触发备用策略。
六、其他
可跟进的文献
- DRAL: Deep Reinforcement Adaptive Learning for Multi-UAVs Navigation in Unknown Indoor Environment(多无人机在未知室内环境中的深度强化学习导航)
- Deep Convolutional Neural Network-Based Autonomous Drone Navigation(无人机自主导航,CNN,比较久远了)
- Securing the Skies: A Comprehensive Survey on Anti-UAV Methods, Benchmarking, and Future Directions(无人机反制)
- Towards Robust Multi-UAV Collaboration: MARL with Noise-Resilient Communication and Attention Mechanisms(鲁棒的多无人机协作与抗噪声通信,agent)