前 言
本文主要介绍基于OpenAMP框架的双核ARM通信案例使用说明。
开发环境
Windows开发环境:Windows10 64bit
开发工具:TD_5.9.1_DR1_2025.1_NL、FD_2025.1_SP1
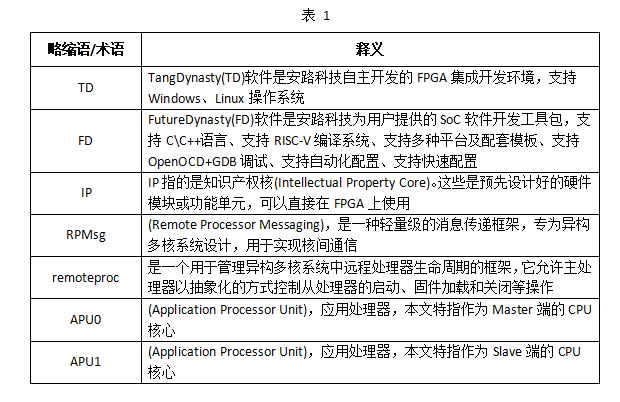
术语表
为便于阅读,下表对文档出现的关键术语进行解释;对于广泛认同释义的术语,在此不做注释。
注意事项
案例位于产品资料"4-软件资料\Demo\amp_demos\"目录下,案例目录详细说明见下表。

1 OpenAMP使用说明
OpenAMP是一个标准化的嵌入式多核框架,主要针对AMP应用场景提供RTOS和裸机程序必要的管理和通信接口。它兼容了Linux的Remoteproc和Rpmsg设计,为远程核心(Remoteprocessors)提供了软件组件,使得用户能够快速地搭建一套标准的核间交互应用场景。
在安路多核异构系统中,APU0作为OpenAMP的Master端,运行Linux系统;APU1作为OpenAMP的Slave端,运行Baremetal或FreeRTOS程序。其中,APU0使用remoteproc(即Rproc)加载APU1程序,并对APU1进行配置。
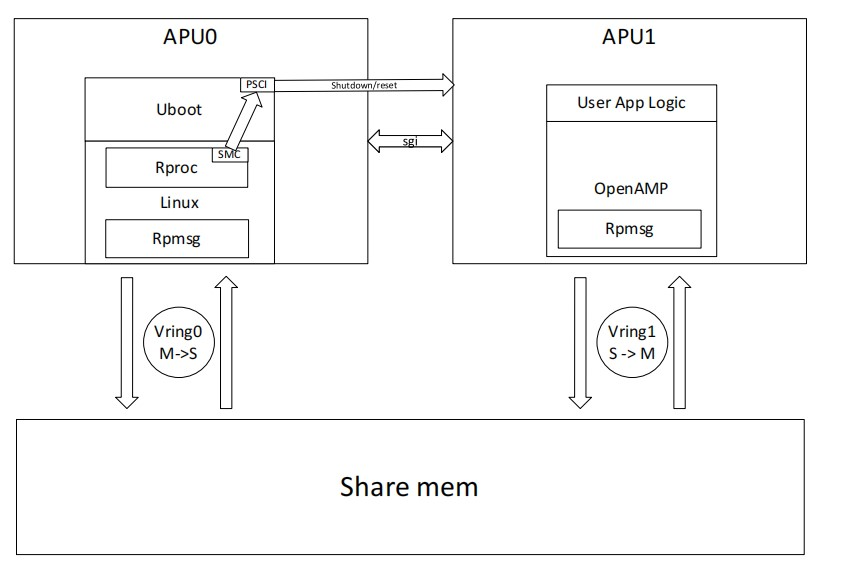
图 1
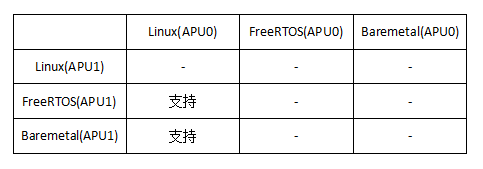
目前TLDR1-EVM支持的OpenAMP场景组合如下表。
2 amp_rpmsg_echo案例
2.1 案例功能
案例功能:APU0使用RPMsg向APU1发送数据,APU1接收到数据后再使用RPMsg向APU0回传数据。APU0对回传的数据进行验证,并输出验证结果。
2.2 TD工程说明
请参考《Linux系统开发手册》的"FSBL TD工程说明"章节。
2.2.1 IP核简介
IP核开发相关资料可查阅产品资料"6-开发参考资料\Anlogic官方参考文档\"目录下文档,IP核配置参数如下。
(1)ARM Processor System
ARM Processor System IP核心配置和FSBL工程基本一致,其他详细配置可参考位于产品资料"4-软件资料\Linux\FSBL\fsbl-版本号\"目录下的FSBL工程。
2.3 FD工程说明
Baremetal和FreeRTOS FD工程注意事项如下:
(1)创建Platform Project工程时"Processor"选择"apu-1"。
备注:生成Baremetal FD工程时,"Operating system"选择"standalone";生成FreeRTOS FD工程时,"Operating system"选择"freertos"。
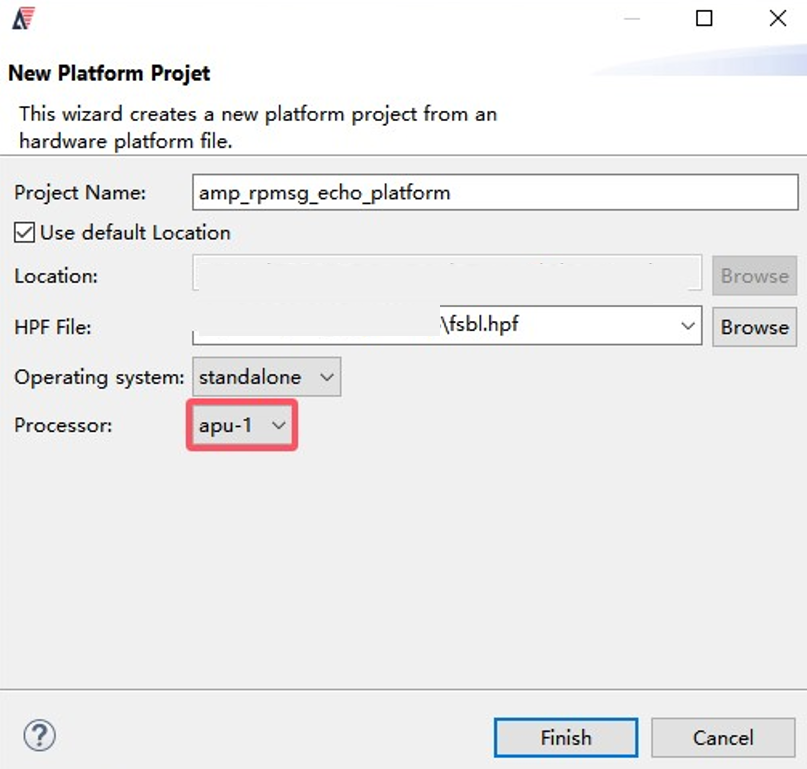
图 2
(2)生成Platform Project工程后双击"system.mss"后继续点击"Modify this BSP's Settings"修改相关配置。
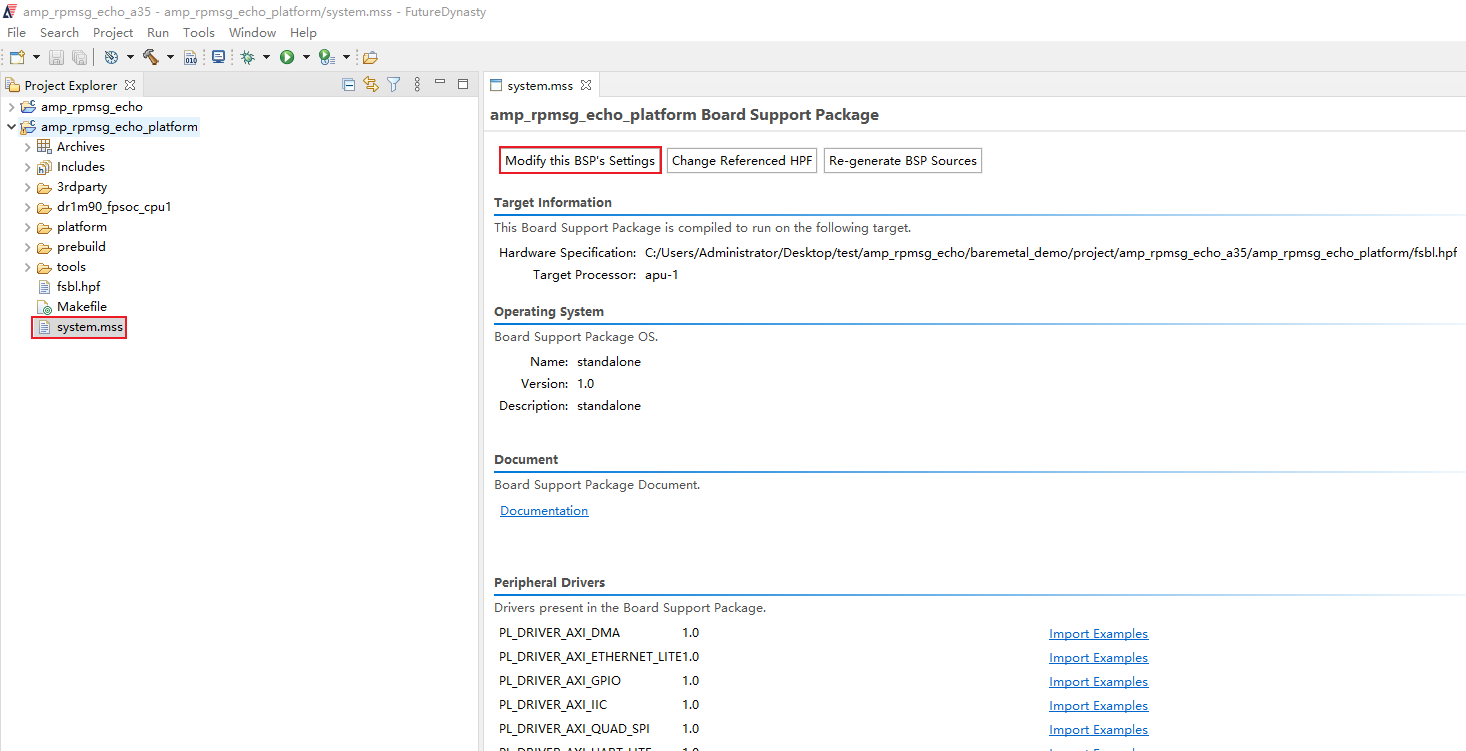
图 3
(3)点击"library"选项勾选"LIB_METAL"和"LIB_OPENAMP",若不勾选这两个板级支持包将会无法正常创建OpenAMP应用。
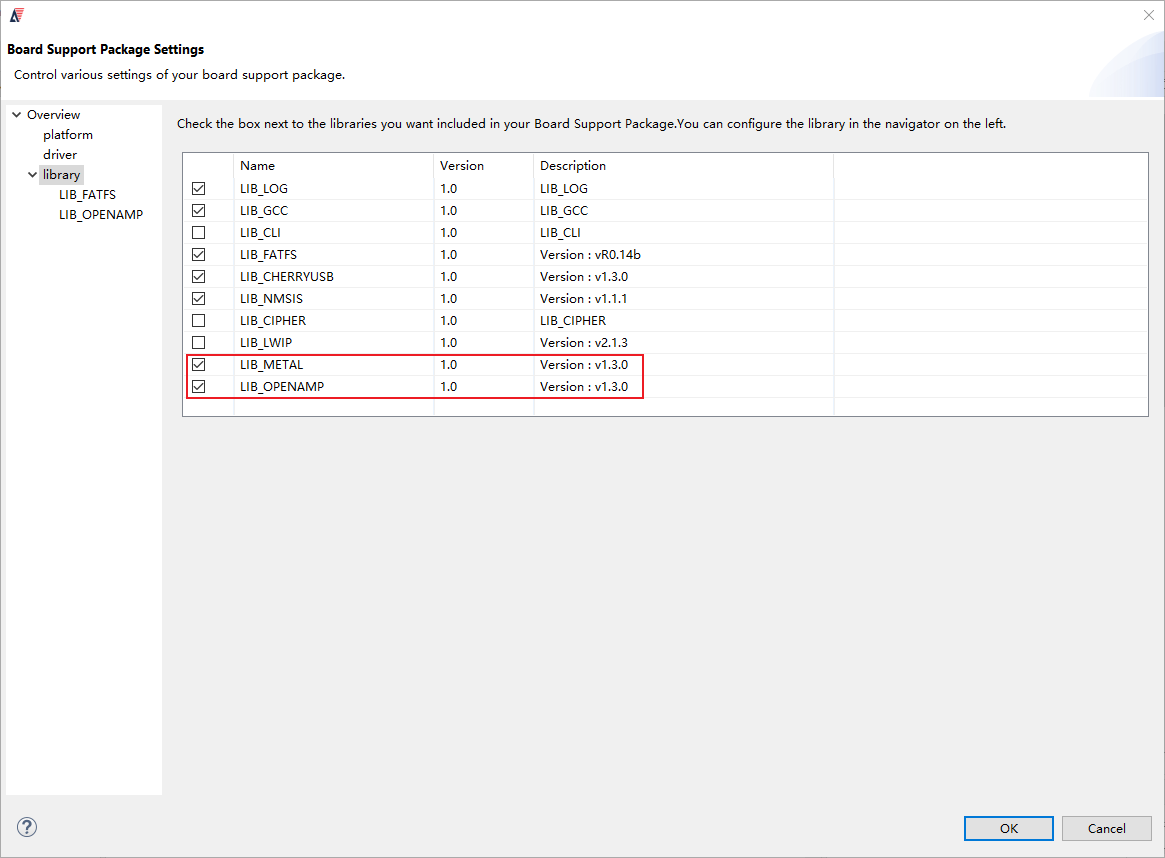
图 4
(4)点击"platform"选项将"OUTPUT_DEV"中的Value值设置为"UART0",若不设置该选项将会导致主机和从机使用同一串口,导致冲突。
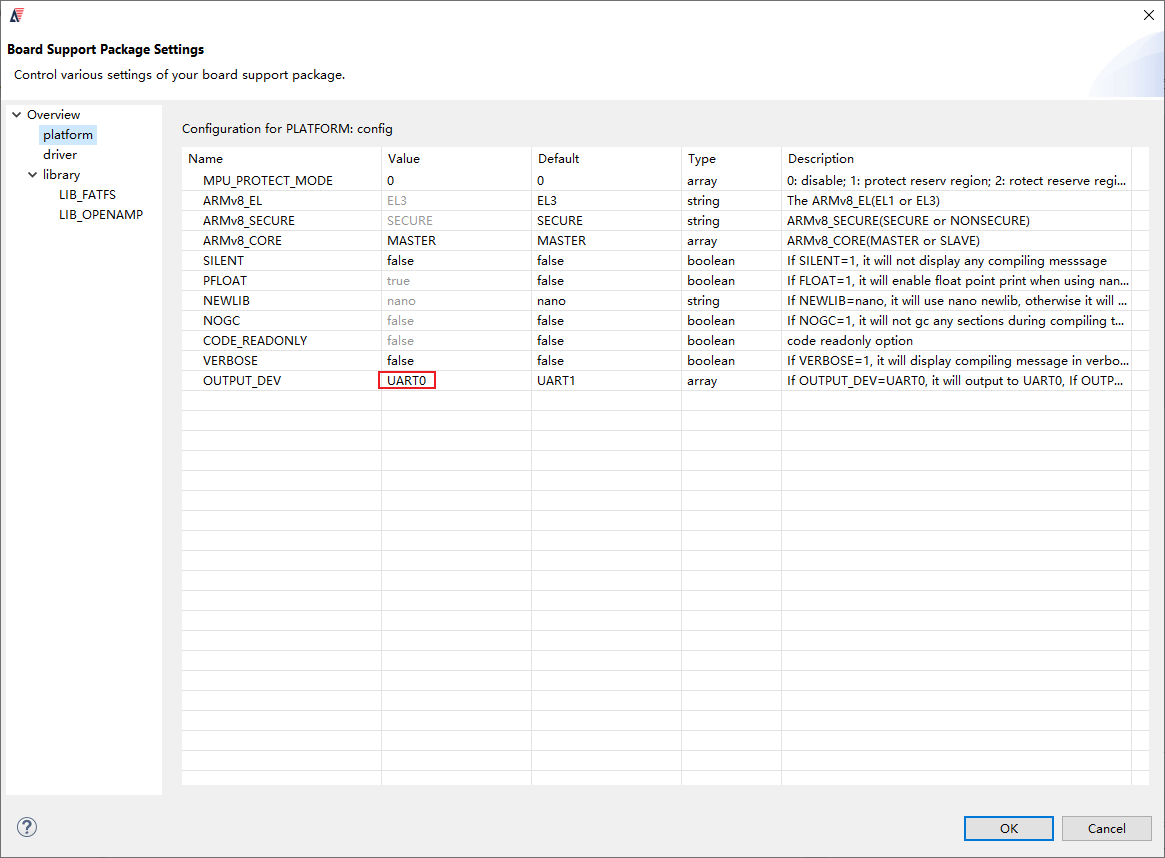
图 5
(5)创建Applicable project工程时直接选择"DEMO_OPENAMP_RPMSG_ECHO"应用。
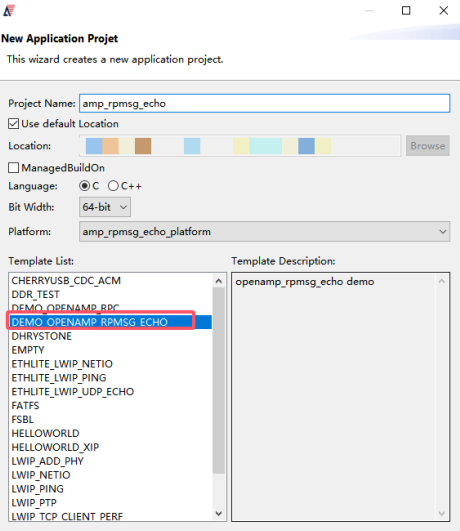
图 6
2.4案例测试
请将产品资料"4-软件资料\Demo\amp_demos\amp_rpmsg_echo\linux_demo\dts\image"目录下的dtb.bin文件拷贝至评估板文件系统目录下。执行如下命令替换系统默认设备树文件,评估板重启生效。
**Target#**mv dtb.bin /boot/dtb.bin
**Target#**reboot

图 7
评估板上电启动后,在U-Boot倒计时结束之前长按"Ctrl + C"进入U-Boot命令行模式,执行如下命令,修改环境变量。
**U-Boot#**setenv mmc_boot 'if mmc dev {devnum}; then devtype=mmc; if test {devnum} -eq 0; then setenv bootargs '"'"'console=ttyS1,115200n8 earlycon=uart,mmio32,0xf8401000 loglevel=8 root=/dev/mmcblk0p2 rw rootfstype=ext4 rootwait maxcpus=1=1'"'"'; fi; if test {devnum} -eq 1; then setenv bootargs '"'"'console=ttyS1,115200n8 earlycon=uart,mmio32,0xf8401000 loglevel=8 root=/dev/mmcblk1p2 rw rootfstype=ext4 rootwait maxcpus=1'"'"'; fi; ext4load mmc {devnum}:2 {kernel_addr_r} {bootdir}/{kernel_image}; ext4load mmc {devnum}:2 {fdt_addr_r} {bootdir}/{devicetree_image}; bootm {kernel_addr_r} - ${fdt_addr_r}; run scan_dev_for_boot_part2; fi'
**U-Boot#**saveenv
**U-Boot#**reset
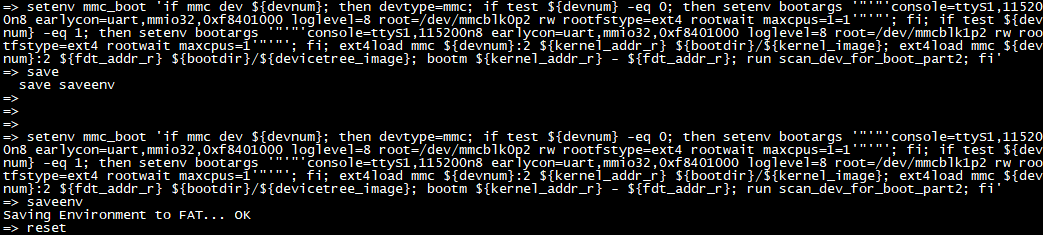
图 8
如需恢复U-Boot环境变量,在U-Boot命令行模式执行以下命令。
**U-Boot#**env default -a -f
**U-Boot#**saveenv
**U-Boot#**reset
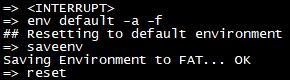
图 9
进入评估板文件系统,执行如下命令,查看环境变量是否设置成功,确保只有一个核心被使用。
**Target#**cat /proc/cpuinfo
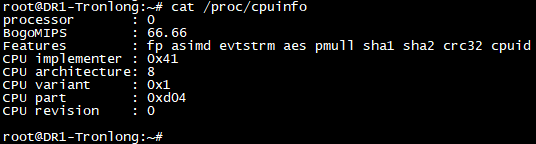
图 10
将APU1 Baremetal或FreeRTOS可执行文件拷贝至评估板文件系统"/lib/firmware/"目录下(若该目录不存在,请新建),并执行如下命令加载APU1程序。本次以Baremeta程序进行演示,如需测试FreeRTOS程序请修改命令中对应的可执行文件名称。
Target# mkdir -p /lib/firmware
Target# cp amp_rpmsg_echo_baremetal_a35.elf /lib/firmware/
**Target#**echo amp_rpmsg_echo_baremetal_a35.elf > /sys/class/remoteproc/remoteproc0/firmware
**Target#**echo start > /sys/class/remoteproc/remoteproc0/state

图 11
将产品资料"4-软件资料\Demo\amp_demos\amp_rpmsg_echo\linux_demo\bin"目录下的APU0应用程序可执行文件echo_test拷贝至评估板文件系统,执行如下命令,通过RPMsg实现与APU1进行通信。
**Target#**chmod +x echo_test
Target#./echo_test
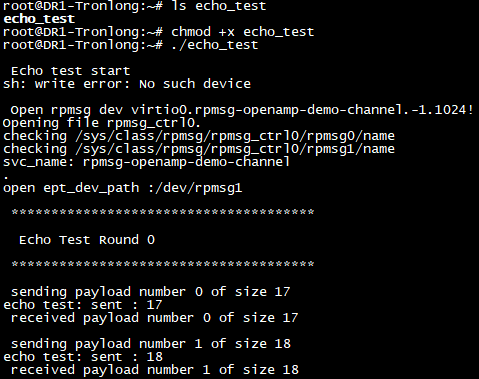
图 12

图 13
执行如下命令,停止APU1程序。
**Target#**echo stop > /sys/class/remoteproc/remoteproc0/state

图 14
2.5案例编译
2.5.1 设备树编译
将案例"\linux_demo\dts\src\"目录下tldr1-evm.dts设备树拷贝至LinuxSDK源码"linux/arch/arm64/boot/dts/anlogic"目录下。

图 15
请按照《Linux系统开发手册》文档"LinuxSDK配置与编译"章节,重新编译LinuxSDK即可生成新的设备树镜像文件,位于LinuxSDK源码"device/output/anlogic_dr1m90/image"目录下。

图 16
2.5.2 APU0应用程序编译
请参考《Linux系统开发手册》文档编译LinuxSDK,并将APU0应用程序源码src目录拷贝至Ubuntu,然后在源码目录下执行如下命令修改Makefile文件。工具链路径请以实际情况进行修改。

图 17
修改内容如下:
CC = /home/tronlong/DR1/SDK_2025.1/toolchains/aarch64-linux/bin/aarch64-linux-gnu-gcc
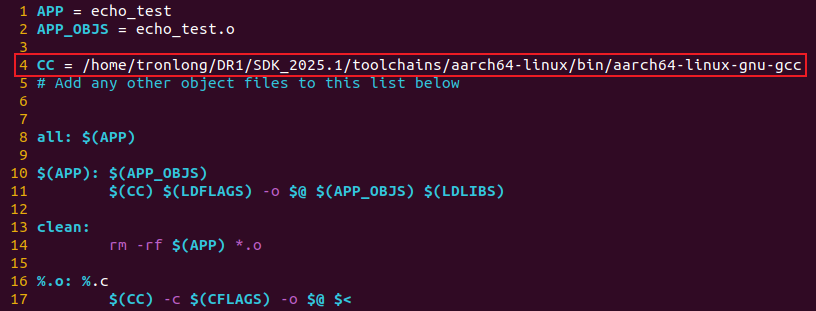
图 18
修改完成保存后,在源码目录下执行如下命令进行编译。
**Host#**make

图 19
2.5.3APU1 baremetal与FreeRTOS程序编译
请参考《TD-FD工程编译与加载》进行工程编译。
2.6关键代码
2.6.1 linux_demo代码说明
linux_demo程序的echo_test.c文件位于案例"linux_demo\src\"目录下。
(1)加载RPMsg_char驱动。
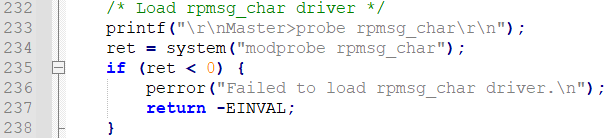
图 20
(2)绑定RPMsg设备并获取RPMsg驱动。
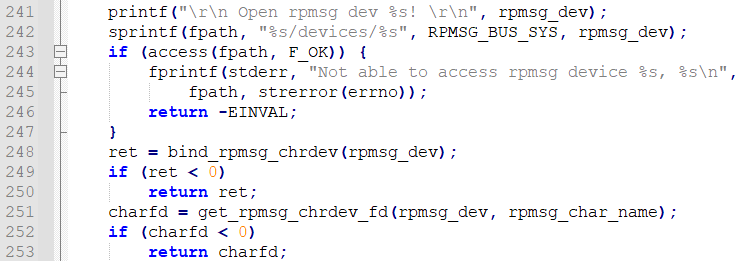
图 21
(3)创建RPMsg端点。
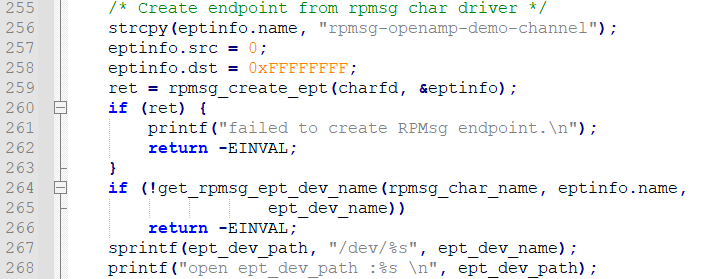
图 22
(4)打开RPMsg驱动设备节点。
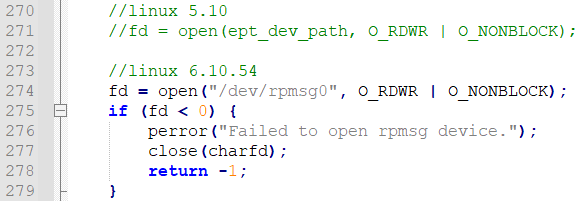
图 23
(5)分配内存,进行数据收发测试。
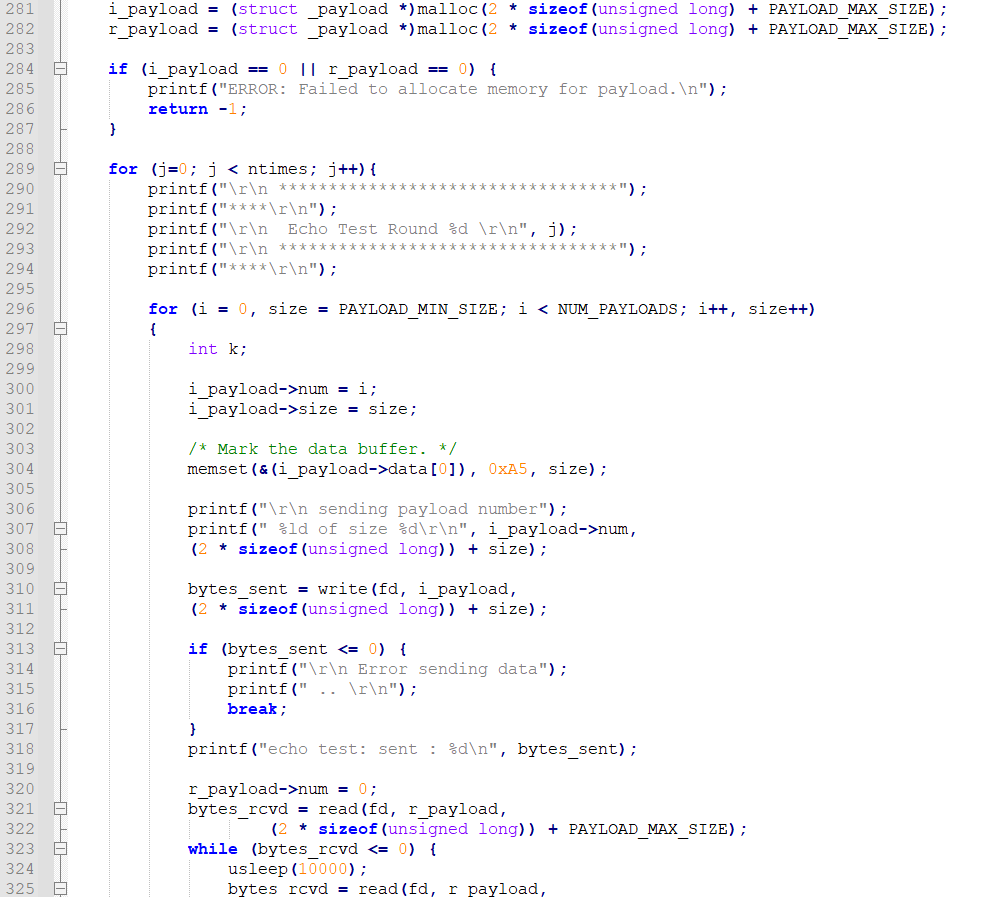
图 24
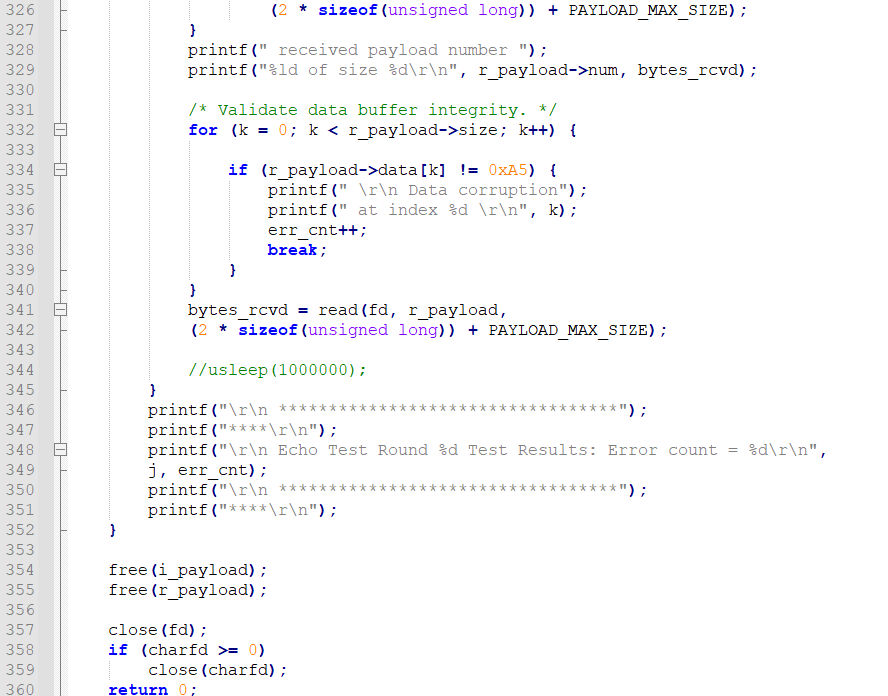
图 25
2.6.2 baremetal_demo代码说明
baremetal_demo程序的rpmsg-echo.c文件位于案例
"baremetal_demo\project\amp_rpmsg_echo_a35\amp_rpmsg_echo\src\system\generic\"目录下。
(1)main()函数调用openamp_sample()函数进行系统初始化。
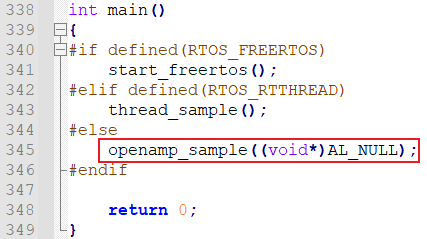
图 26
(2)openamp_sample()函数初始化系统、创建设备、调用app函数、释放设备。
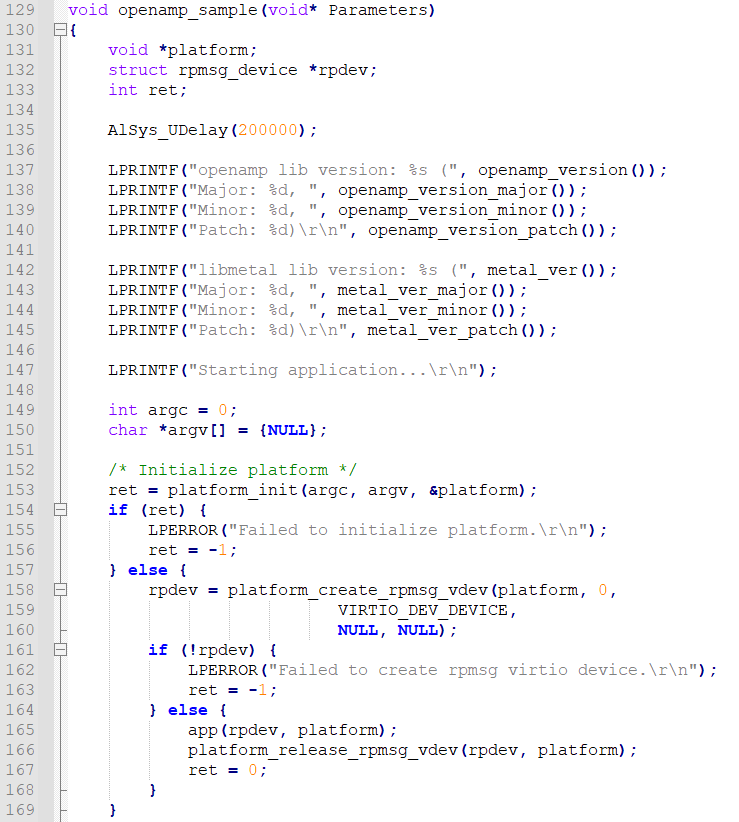
图 27
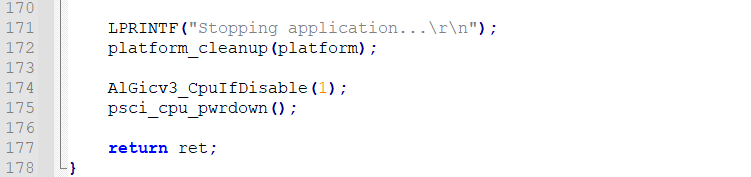
图 28
(3)创建RPMsg端点、进行消息处理和检测、最后销毁RPMsg端点。
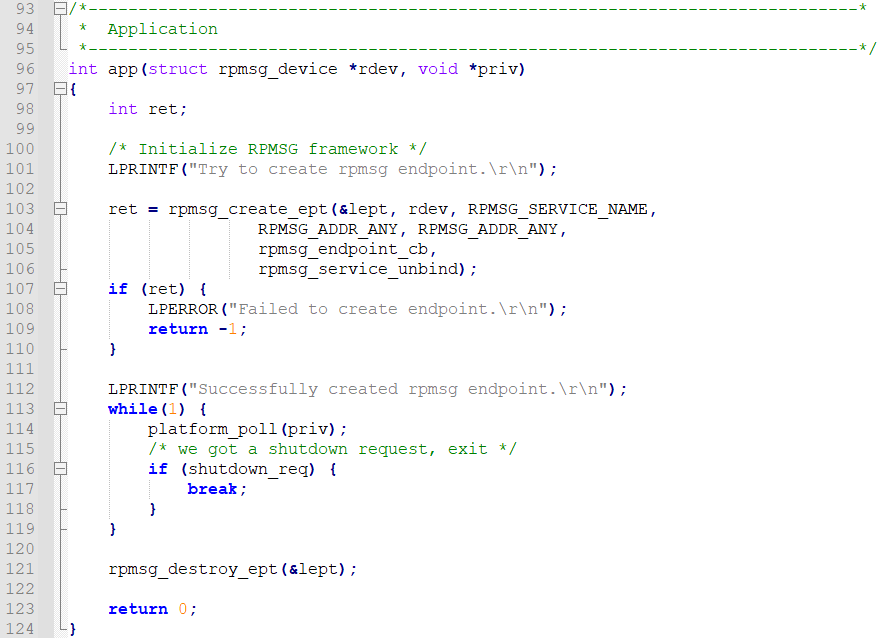
图 29
2.6.3 freertos_demo代码说明
由于FreeRTOS与Baremetal程序相似,freertos_demo代码说明可参考baremetal_demo代码说明小节。