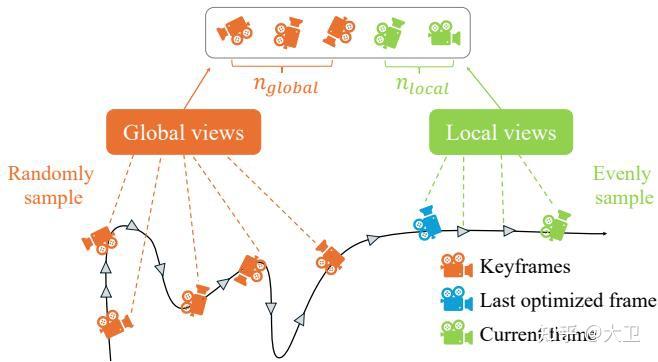
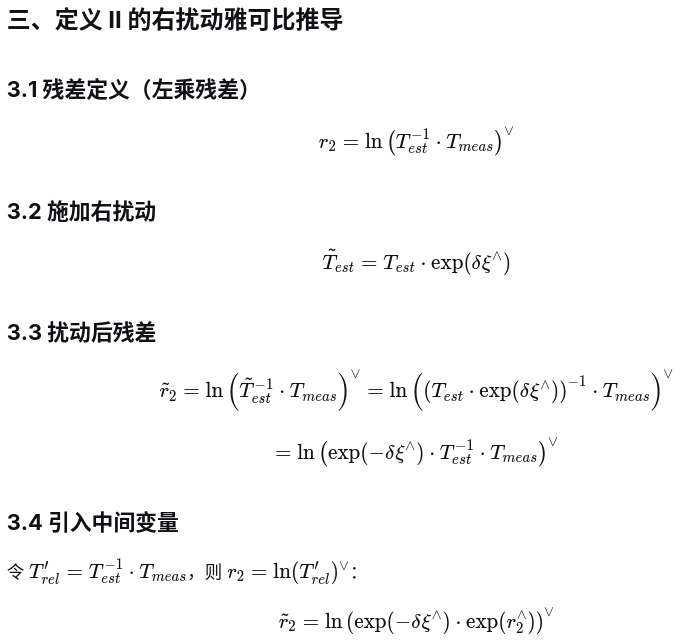
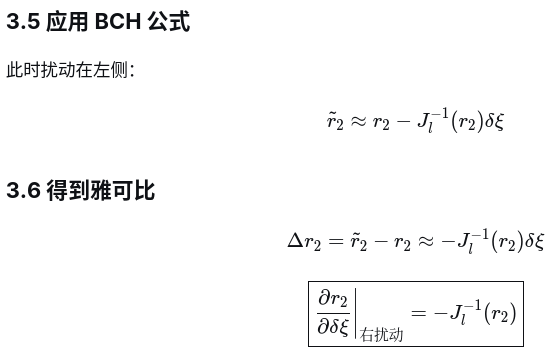
本节讲解绝对位姿的右扰动推导模式,依然沿用之前的图示
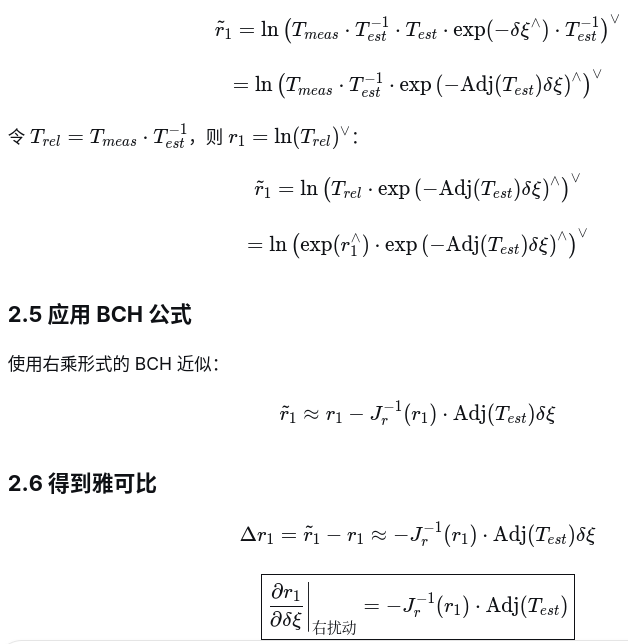
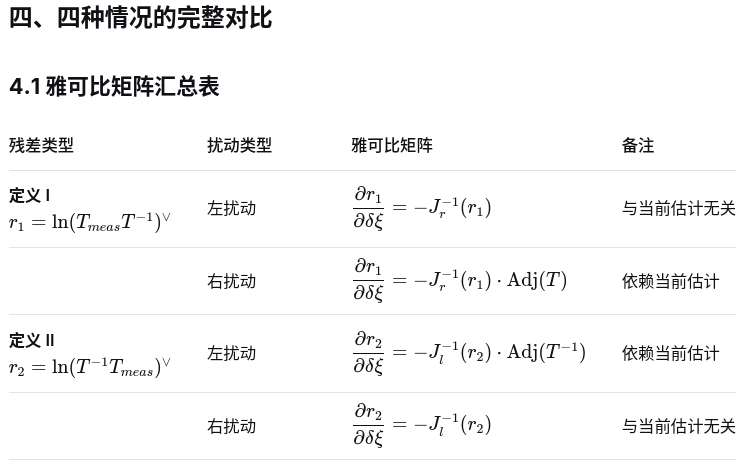
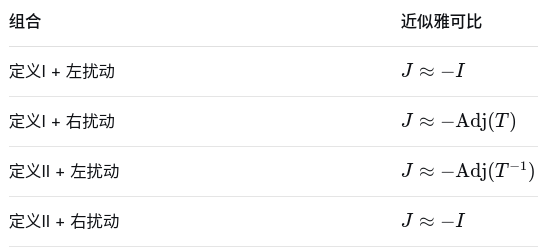
本节讲解了对SE3的右扰动雅克比即其推导,需要注意的是,左扰动的雅克比需要配套的左乘状态更新,右扰动配套右乘更新,若这里不注意混用,则优化问题,可能无法收敛