编写启动代码
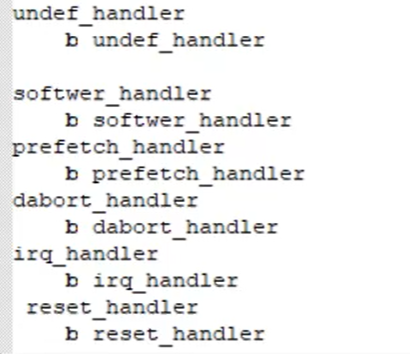
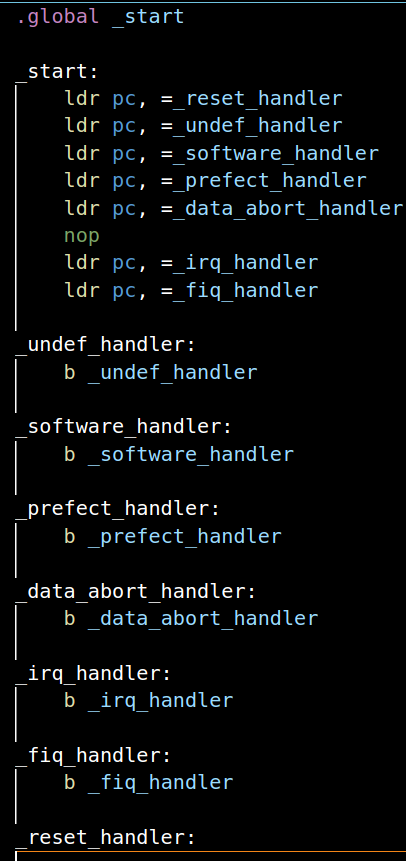
几种不同的模式分别配置不同的函数调用
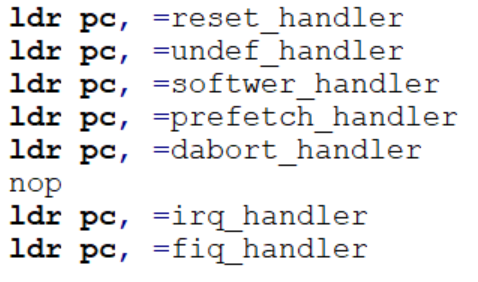
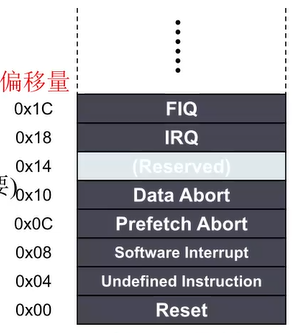
注:nop为空指令,对应0x14空着的Reserved
汇编器会自动将第一条指令放在0x00处,每条指令占4个字节,通过偏移量表将不同的异常模式一一对应在不同的位置
其中reset为复位,上电则会默认进入这种异常,所以可以用于初始化硬件等工作,undef为未定义的指令异常,softwer软中断,prefetch指令预取中止,dabort数据预取中止,irq和fiq为硬中断
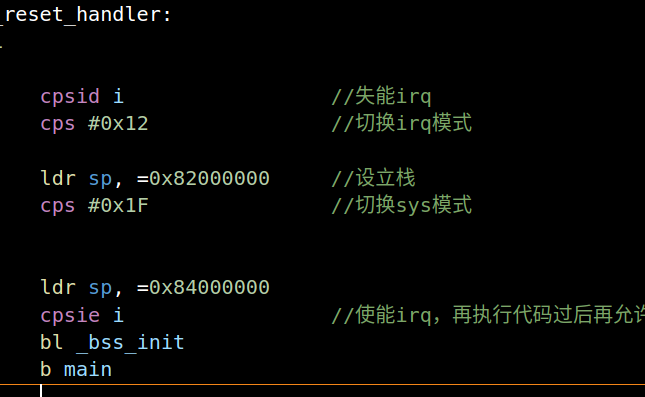
切换模式
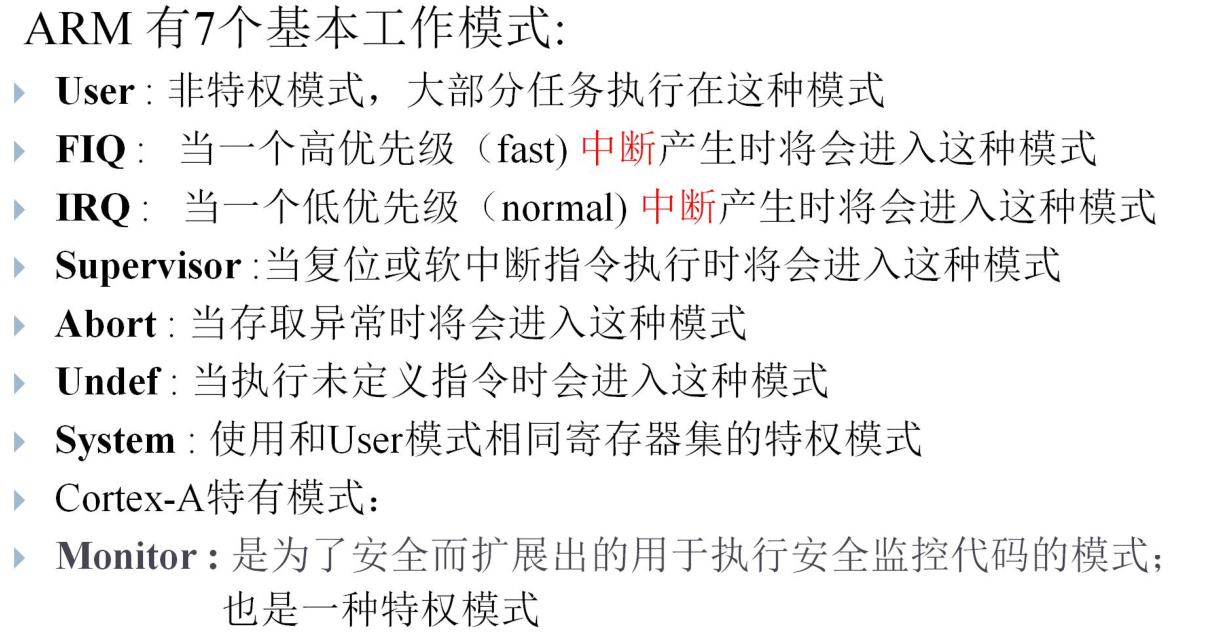

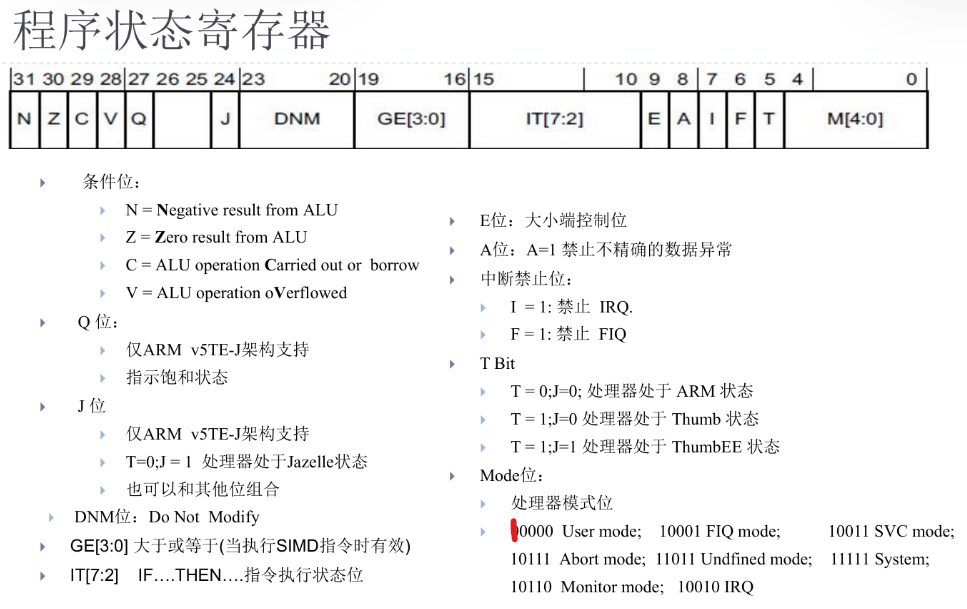
当各种异常发生时,ARM会切换到对应的模式,而User模式是在正常运行时的模式,然而在一上电就进入SVC模式,所以在reset函数中要切换模式到User模式
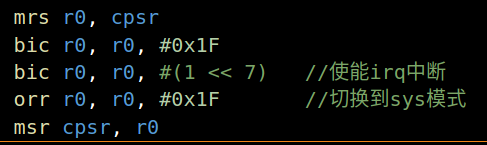
mrs,msr切换指令
通过更改CPSR来更改当前状态,即上图的Mode位,不能用mov等指令进行更改,而是用mrs和mrs。
mrs:将状态寄存器(CPSR 或 SPSR)的值读到通用寄存器中
msr:将通用寄存器的值写入状态寄存器(CPSR 或 SPSR)
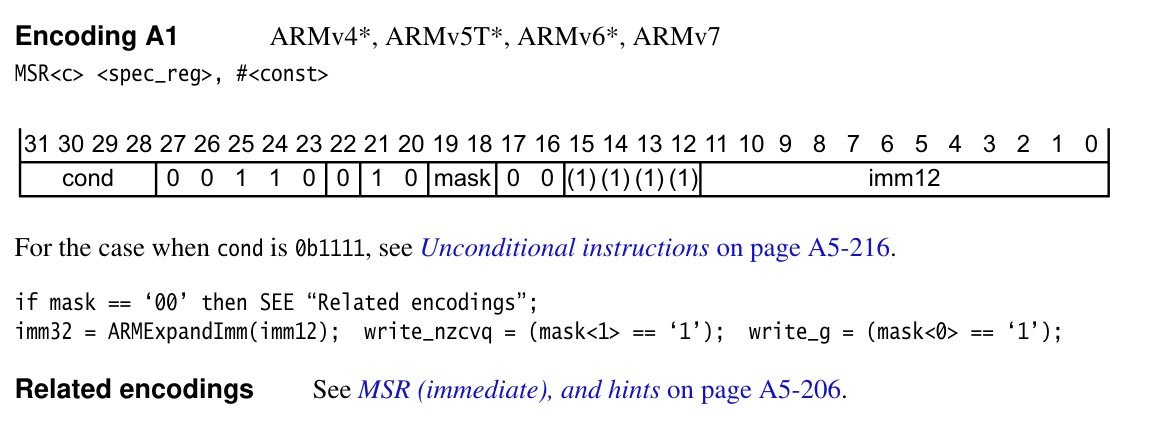
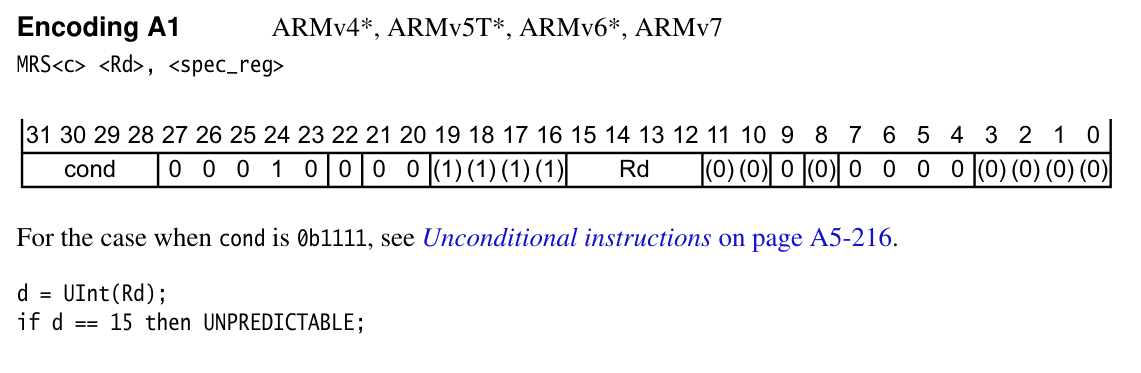
spec_reg:特殊功能寄存器CPSR和SPSR
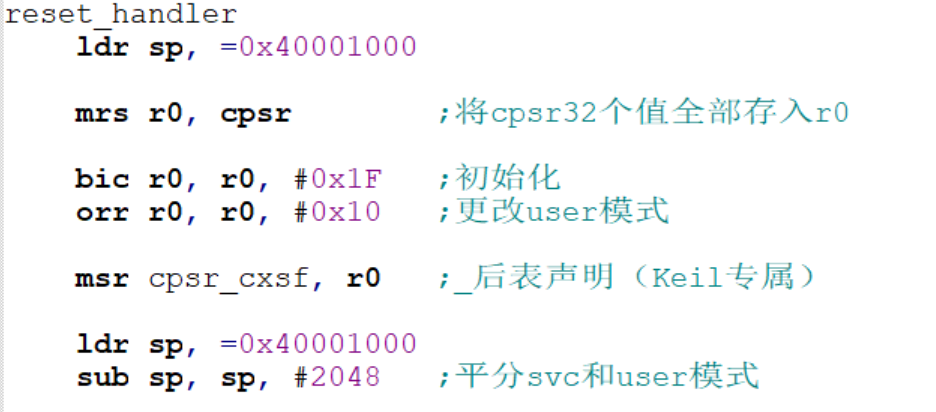
先将cpsr读写到r0中,由于cpsr不能用mov等指令更改,但是r0可以,所以可以通过更改r0再将值复写回去
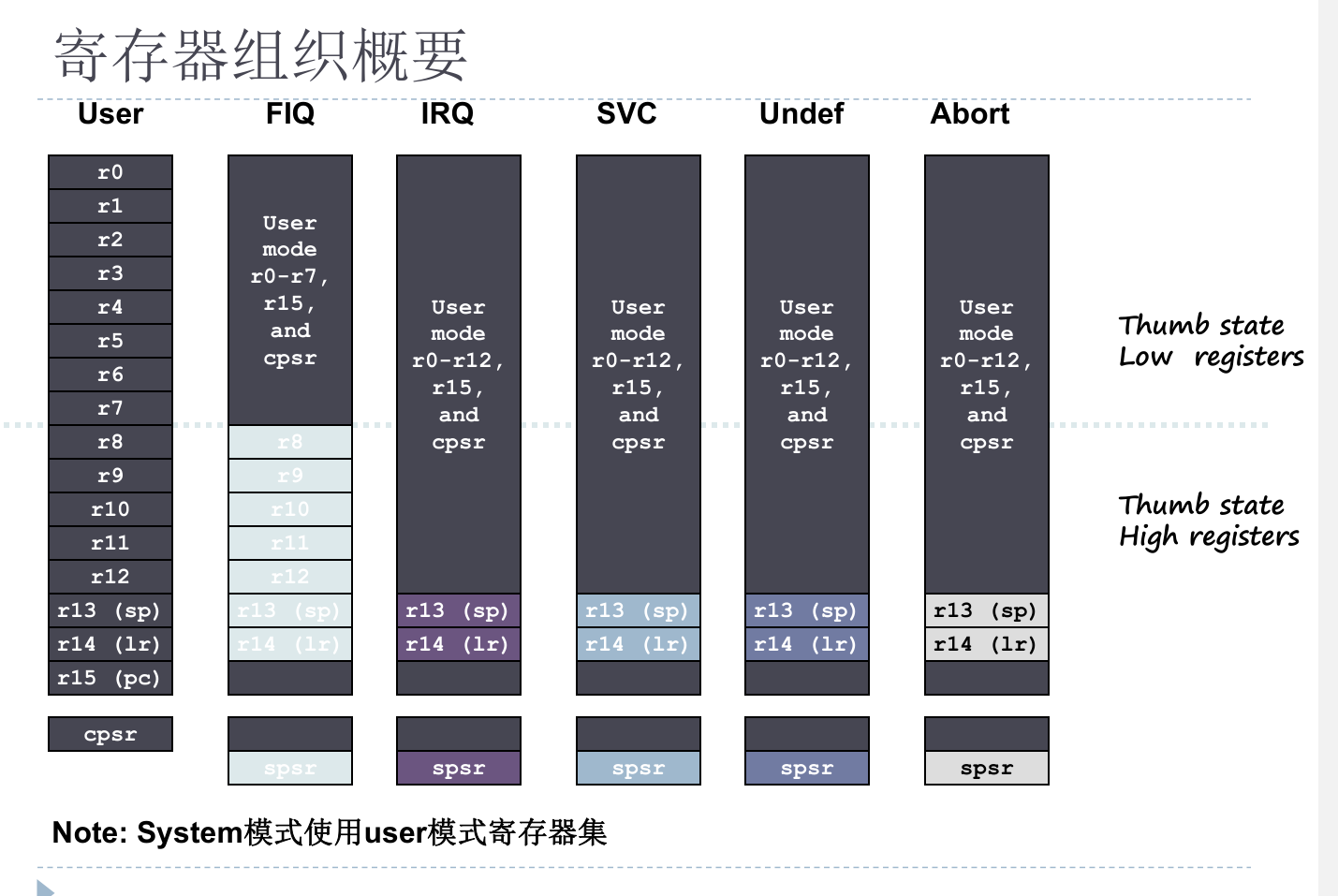
最后一行防止两个模式共用一个栈


黑粗体表示现在执行的模式
CPS切换模式指令
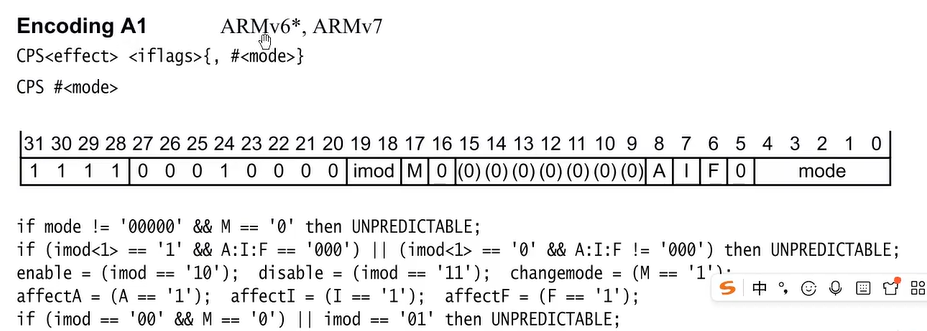
CPS+相对应的模式值
cpsid,cpsie
cpsie为开启中断,cpsie为关闭中断,后面跟上i,f,if分别对应irq中断,frq中断和两个中断
SVC(SWI)软中断指令
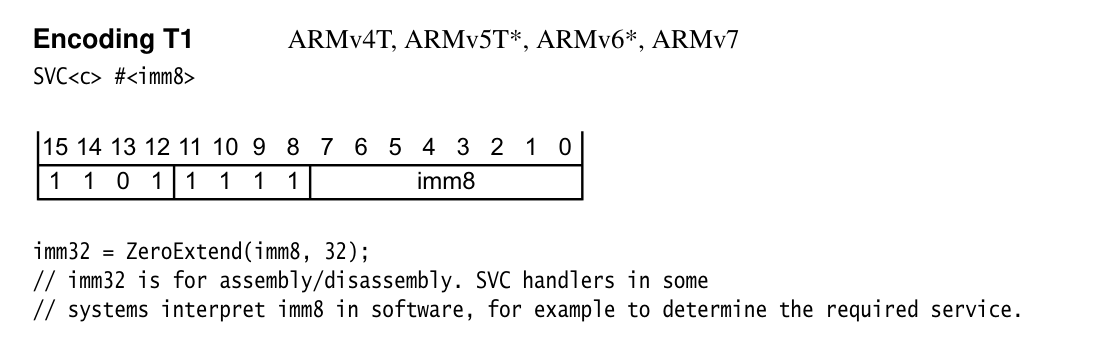
执行swi这一步,CPU自动跳转到地址0x08,也就是偏移量中的软中断模式,执行完后会跳转回来,但是模式需要自己手动调回去,其中#7是自规定的编号
GNU体系下的汇编
在VSCode中安装Arm插件

需要注意的是,在开头只需加上.global _start,start为标签,紧接着在下面将标签写出来,标签后面加冒号表明这是地址符号而不是指令
I.MX6ULL
开发板简介
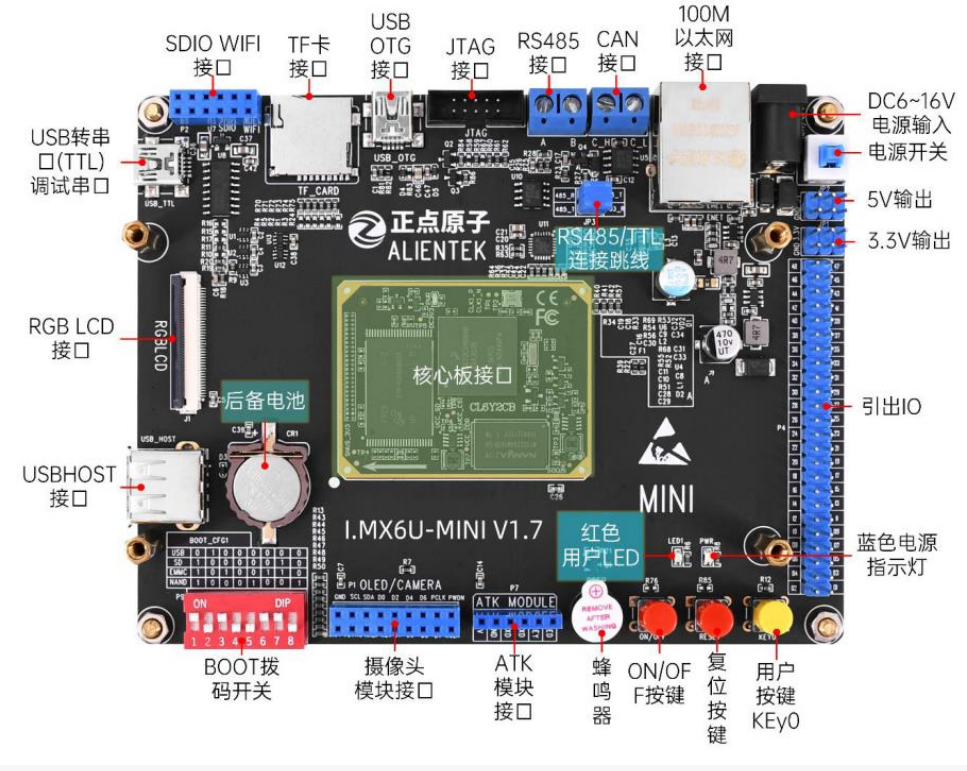
核心板接口:
左:8GB的eMMC
中间:SOC(I.MX6ULL)
右下:512M的RAM
核心板之下这一整块作为底板由正点原子设计,SOC由恩智浦生产,SOC中CortexA7的内核由ARM公司设计
Ubutu编译器安装
(1)拷贝 gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz 到/usr/local/arm
(2)解压 sudo tar -xvf gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz
(3)删除 sudo rm gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz
(4)配置 回家目录, 修改环境变量配置文件 vi .bashrc
export PATH=$PATH:/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/
(5)重启虚拟机:reboot
(6)检查编译器版本:arm-linux-gnueabihf-gcc -v