同之前相对位姿,若只需要单一旋转或者平移的融合的需求,则分开求解会更直观,接下来请看如何求解吧,先以右乘作为切入点
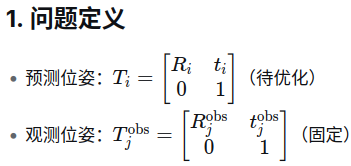
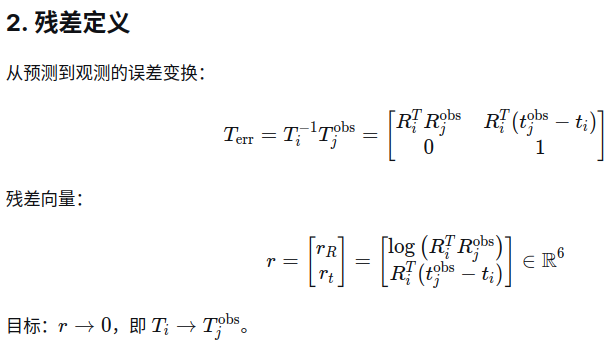
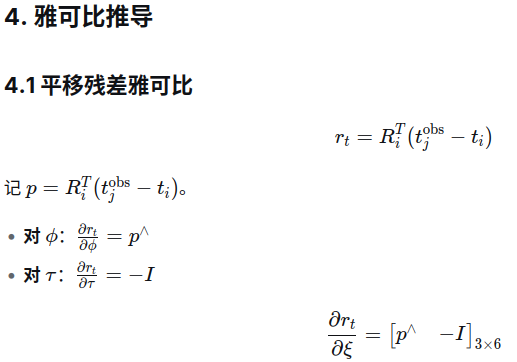
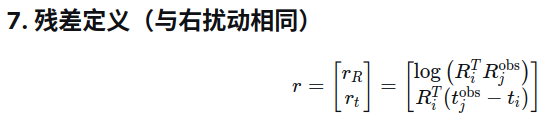
11. 残差定义
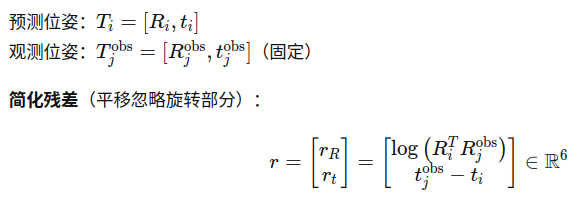
注意:这里观测减预测,实际我个人比较喜欢预测减观测,这样推出来的雅克比可以忽略负号,下面推导观测减预测,多了一个负号
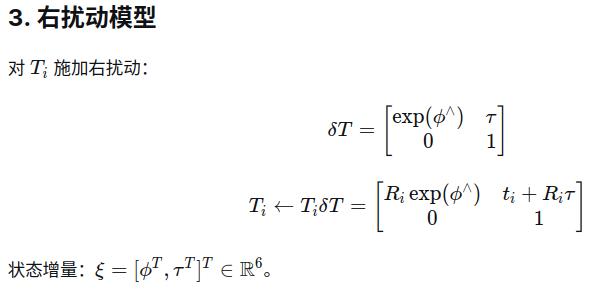
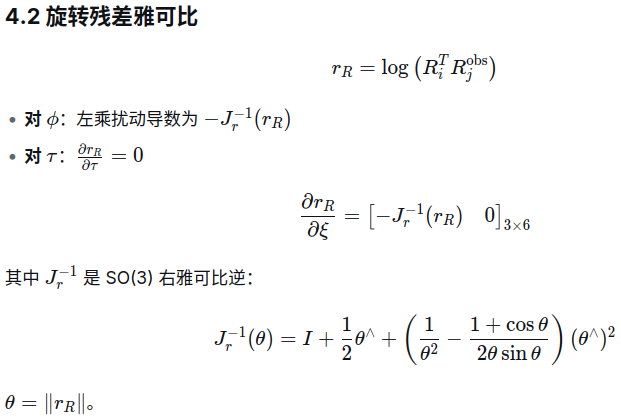
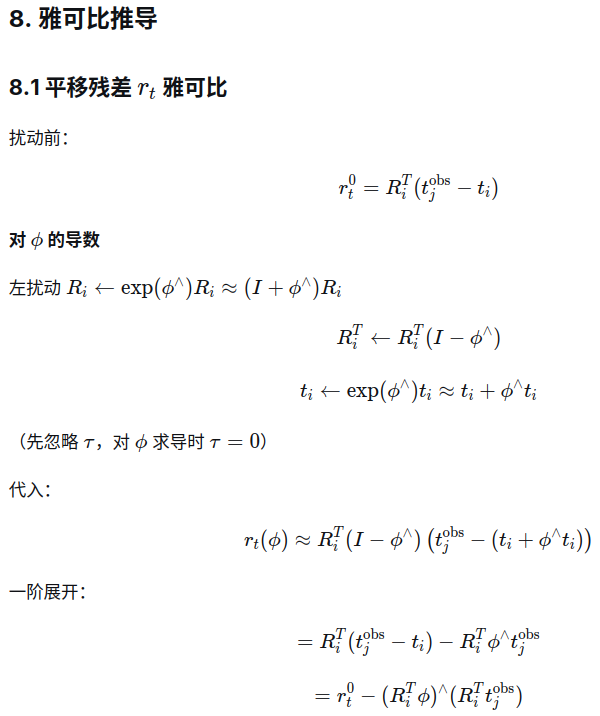
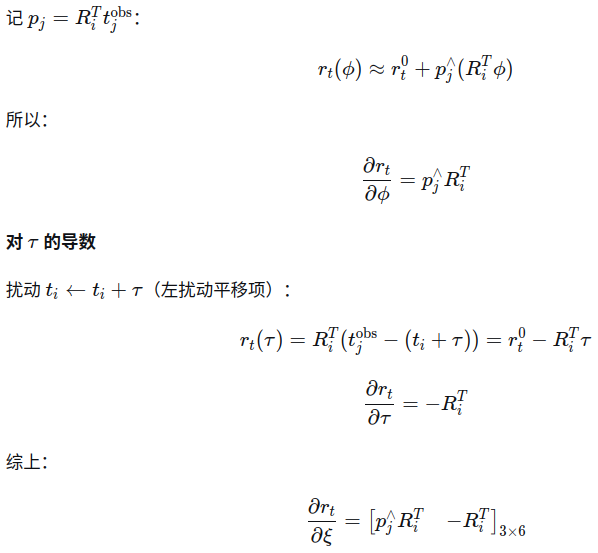
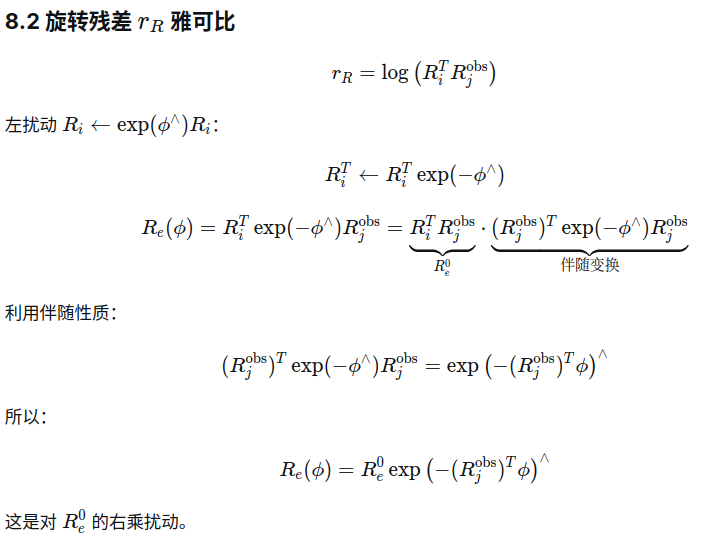
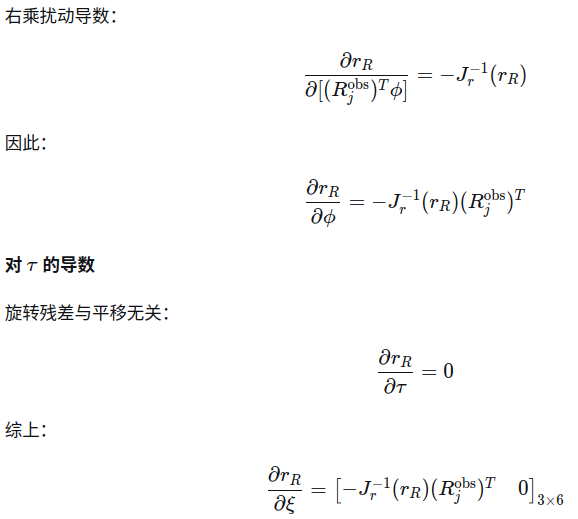
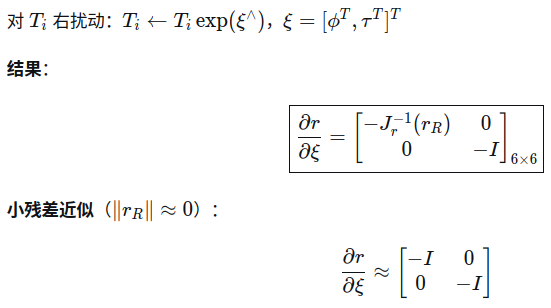
12. 右扰动模型雅可比
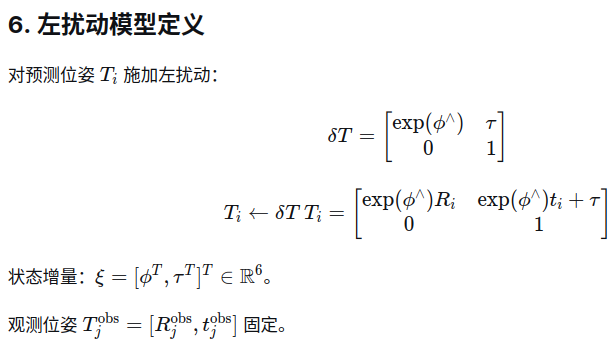
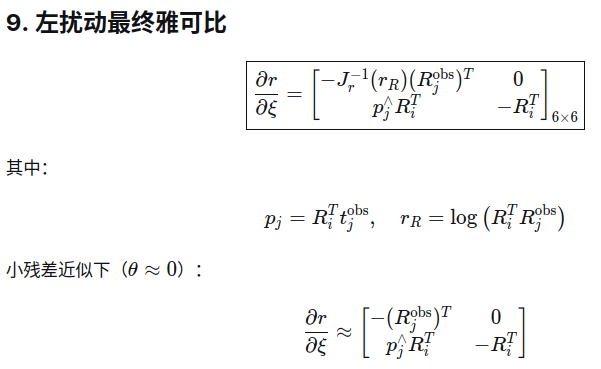
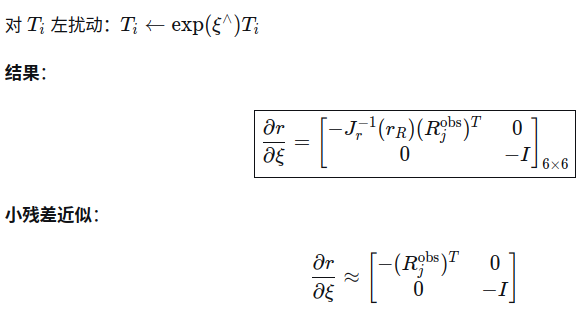
13. 左扰动模型雅可比
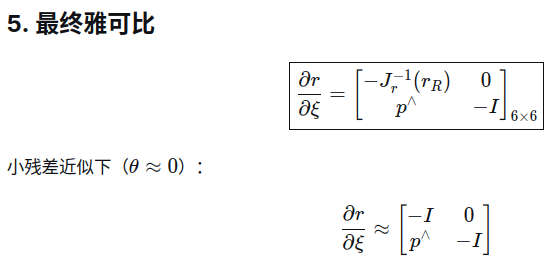
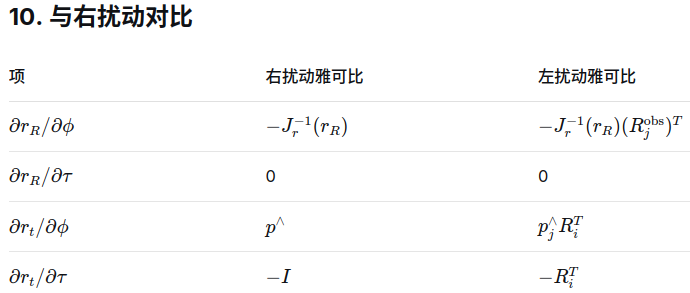
总结
本文详细推导了分开形式的残差及雅克比左右扰动模型,经过这么多章节相似方法的推导,应该能发现一个现象,这种类型的推导,基本都是先定左右扰动模型,然后要么用一阶近似,要么伴随,构造BCH公式,这种位姿的融合讲解基本差不多了,下一讲应该是四元素或者实战了