紧接上文
pwm可以做到触发adc采样,并且是我们想要的触发,接下来看看实际应用情况
0. demo板测试引脚
led:pc6 pc7
pwm:pa11
1. 规则组单通道单次转换
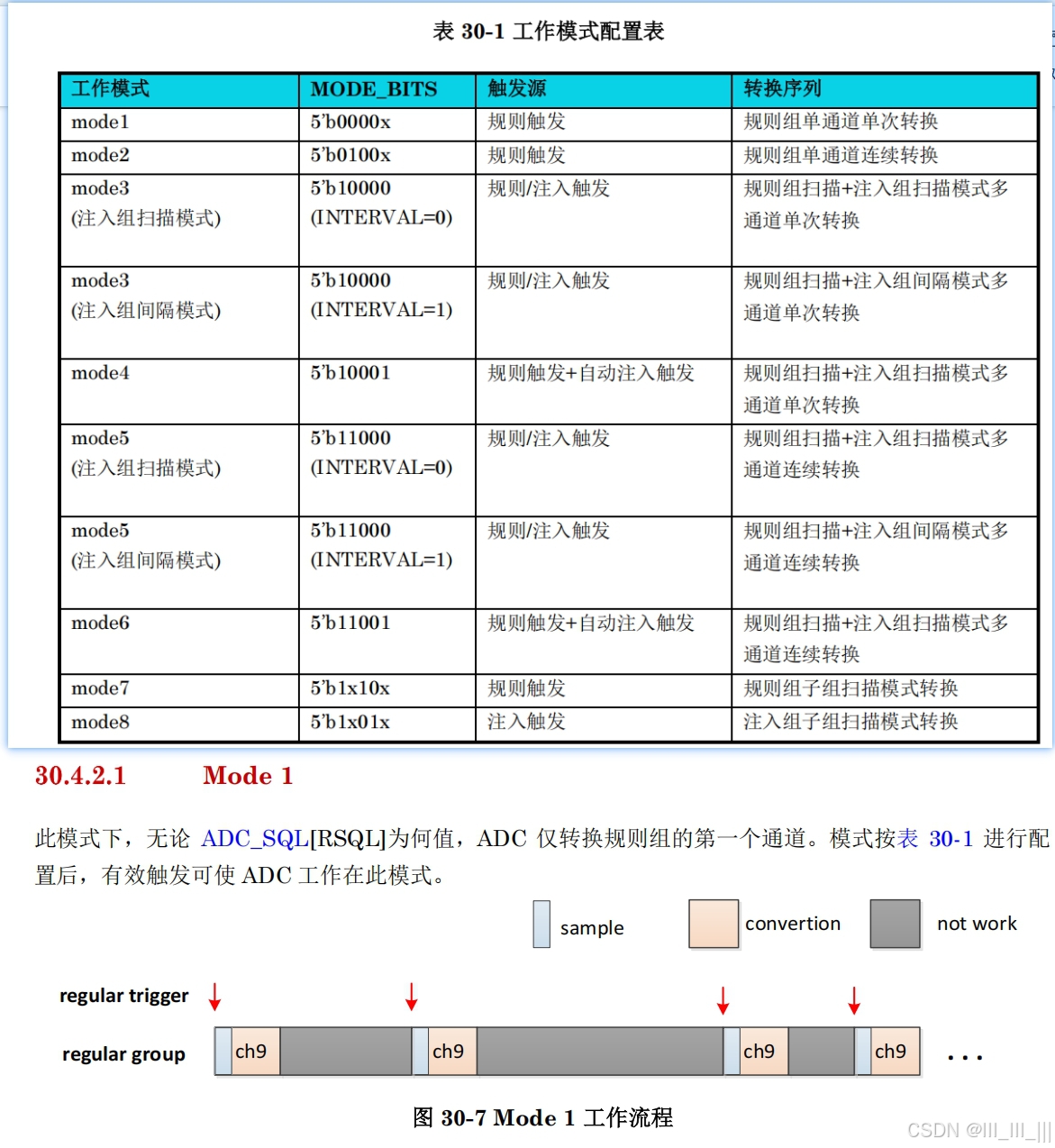
如果我是想在每个pwm的最高点触发一次adc采样
三次采样分别在三个pwm的中间点,可以使用mode1这种方式(实测无法使用,会一次全部触发)
2. adc/pwm/ctu的初始化顺序
这三个模块的初始化顺序会影响到adc第一次触发的采样点
在前面我们2k左右的pwm,看起来还行
当我们吧pwm改成20k的时候
我们把ctu放在最后,刚好卡在第一个pwm的中间点的后面,算是卡了个bug来确保第一次采样点是正确的
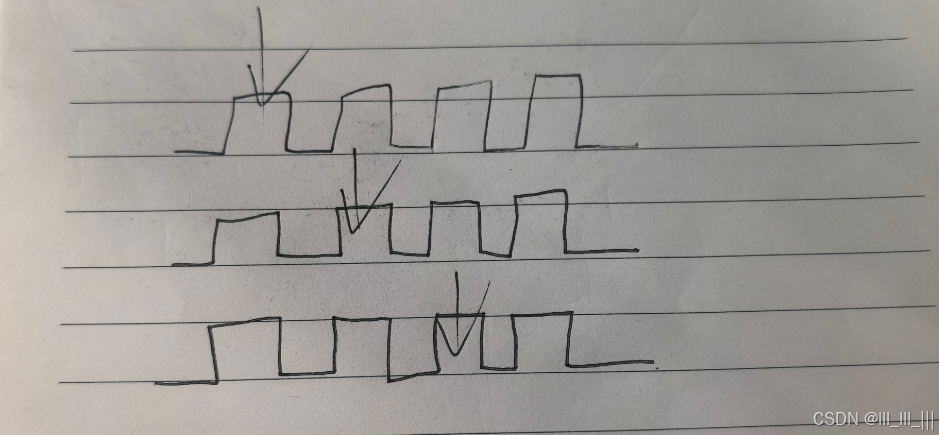
 在初始化时序不同,pwm相同的情况下,会出现以下采样情况
在初始化时序不同,pwm相同的情况下,会出现以下采样情况
adc-pwm-ctu顺序
pwm-ctu-adc顺序
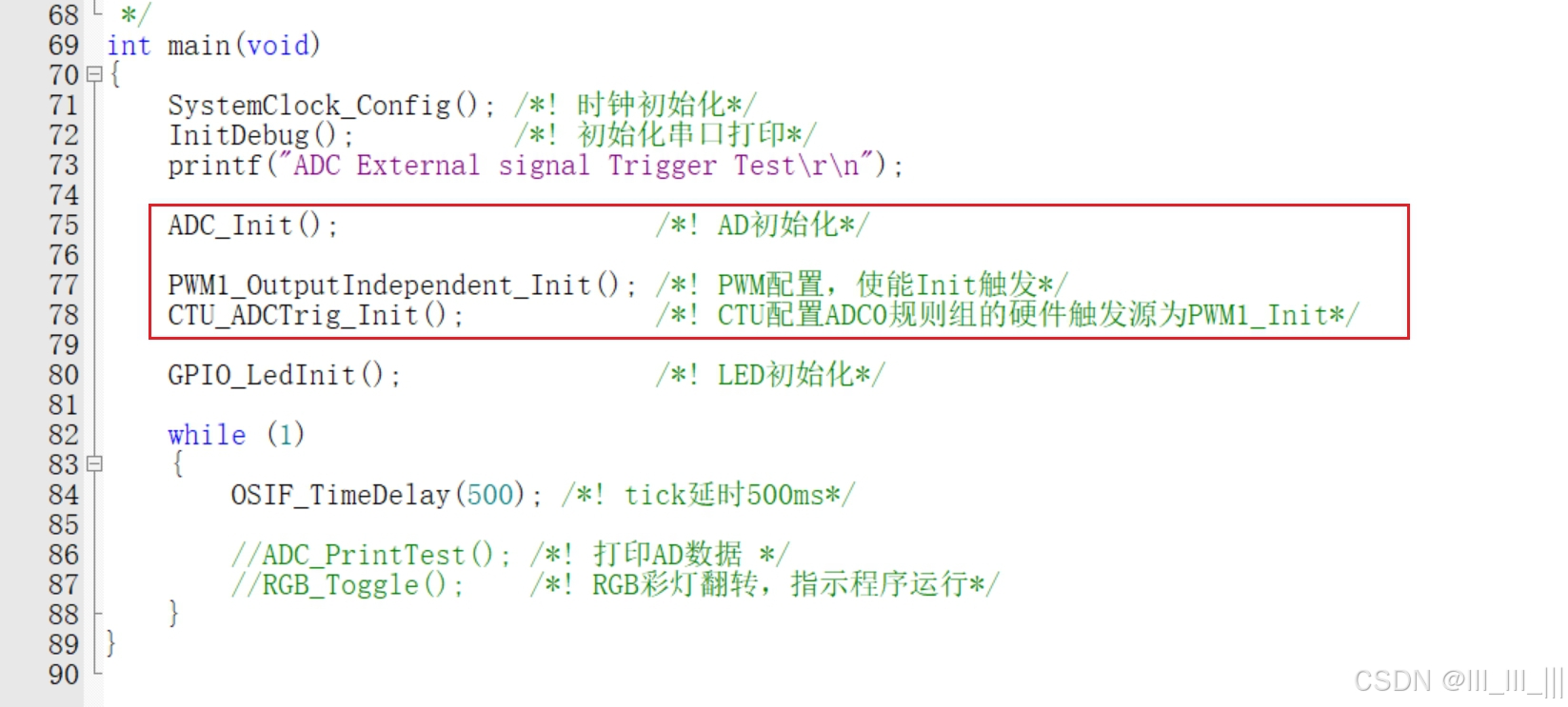
4. 三个模块的配置代码
前面的代码都不是很完整,这里贴一下完整的代码
cpp
/*!
* @file adc_sample.c
*
* @brief This file provides ADC functions.
*/
/* =============================== Includes =============================== */
#include "adc_sample.h"
#include "adc_hw.h"
#include "ctu_drv.h"
#include "ctu_hw.h"
#include "gpio.h"
/* =============================== Define =============================== */
#define ADC_INDEX (0U)
#define CTU_INDEX (0U)
/* =============================== Typedef =============================== */
/* =============================== Variables =============================== */
uint16_t g_ADC_value = 0;
/* ========================= Functions declaration ======================== */
/* ========================= Functions definition ========================= */
/*!
* @brief ADC中断回调函数
* ADC转换完成后,在中断里翻转LED电平状态,并读取ADC转换结果
* @param none
* @return none
*/
void ADC_Callback(adc_interrupt_info_t *info, void *parameter)
{
if (info->event & ADC_EVENT_EOC) /*! EOC标志位,指示ADC转换完成*/
{
LED4_TOGGLE; /*! 翻转LED电平*/
//ADC_DRV_GetSeqResult(ADC_INDEX, ADC_RSEQ_0, &g_ADC_value); /*! 获取ADC转换的数值 */
}
}
/*!
* @brief ADC数据打印.
*
* @param[in] none
*
* @return none
*/
void ADC_PrintTest(void)
{
/*! 打印ADC通道转换结果*/
printf("ADC_value: VR1 = 0x%x \r\n", g_ADC_value);
}
/*!
* @brief CTU模块配置
* 为ADC0的规则组硬件触发源选择为PWM_Init触发
* @param none
* @return none
*/
void CTU_ADCTrig_Init(void)
{
CTU_DRV_Init(CTU_INDEX); /*打开CTU模块的接口时钟*/
/*! ADC0_REGULAR0硬件触发源选择PWM1_Init*/
TRGMUX_DRV_SetTrigSourceForTargetModule(CTU_INDEX, TRGMUX_TRIG_SOURCE_PWM1_INIT_TRIG, TRGMUX_TARGET_MODULE_ADC0_REGULAR0);
TRGMUX_DRV_SetLockForTargetModule(CTU_INDEX, TRGMUX_TARGET_MODULE_ADC0_REGULAR0); /*! 配置寄存器锁定,锁定后无法修改该寄存器中的触发源选择,直到下一次系统复位*/
}
/*!
* @brief 配置ADC通道
*
* @param[in] instance: ADC instance number
* @param[in] seq: adc sequence
* @param[in] channel: adc channel
* @return none
*/
void ADC_ConfigChannel(const uint32_t instance, const adc_sequence_t seq, adc_inputchannel_t channel)
{
adc_chan_config_t adcChConfig;
/*!
ADC采样转换时间计算:
FCLK 时钟源为SPLLDIV2_CLK,频率为60MHz
ADCCLK = FCLK/clockDivide = 60/6 = 10MHz
总转换时间 = (SPT+ resolution(12/10/8))×ADCCLK周期+5个FCLK = (5+12)/10+5/60 ≈ 1.78us
注意:12bit分辨率最大转换率为1Msps,10bit分辨率最大转换率为1.2Msps,8bit分辨率最大转换率为1.4Msps
*/
ADC_DRV_InitChanStruct(&adcChConfig); /*! 结构体初始化为默认值*/
adcChConfig.channel = channel; /*! 输入通道选择*/
adcChConfig.spt = ADC_SPT_CLK_5; /*! 采样时间*/
adcChConfig.interruptEn = true; /*! EOC中断使能*/
ADC_DRV_ConfigChan(instance, seq, &adcChConfig); /*! 应用通道配置*/
}
/*!
* @brief ADC模块初始化
* ADC规则组转换,使用硬件触发
*
* @param[in] none
*
* @return none
*/
void ADC_Init(void)
{
adc_converter_config_t adcConfig;
adc_chan_config_t adcChConfig;
/*! ADC输入端口(电位器)配置*/
GPIO_DRV_SetMuxModeSel(VR1_PORT, VR1_PIN, PORT_PIN_DISABLED); /*! 电位器VR1*/
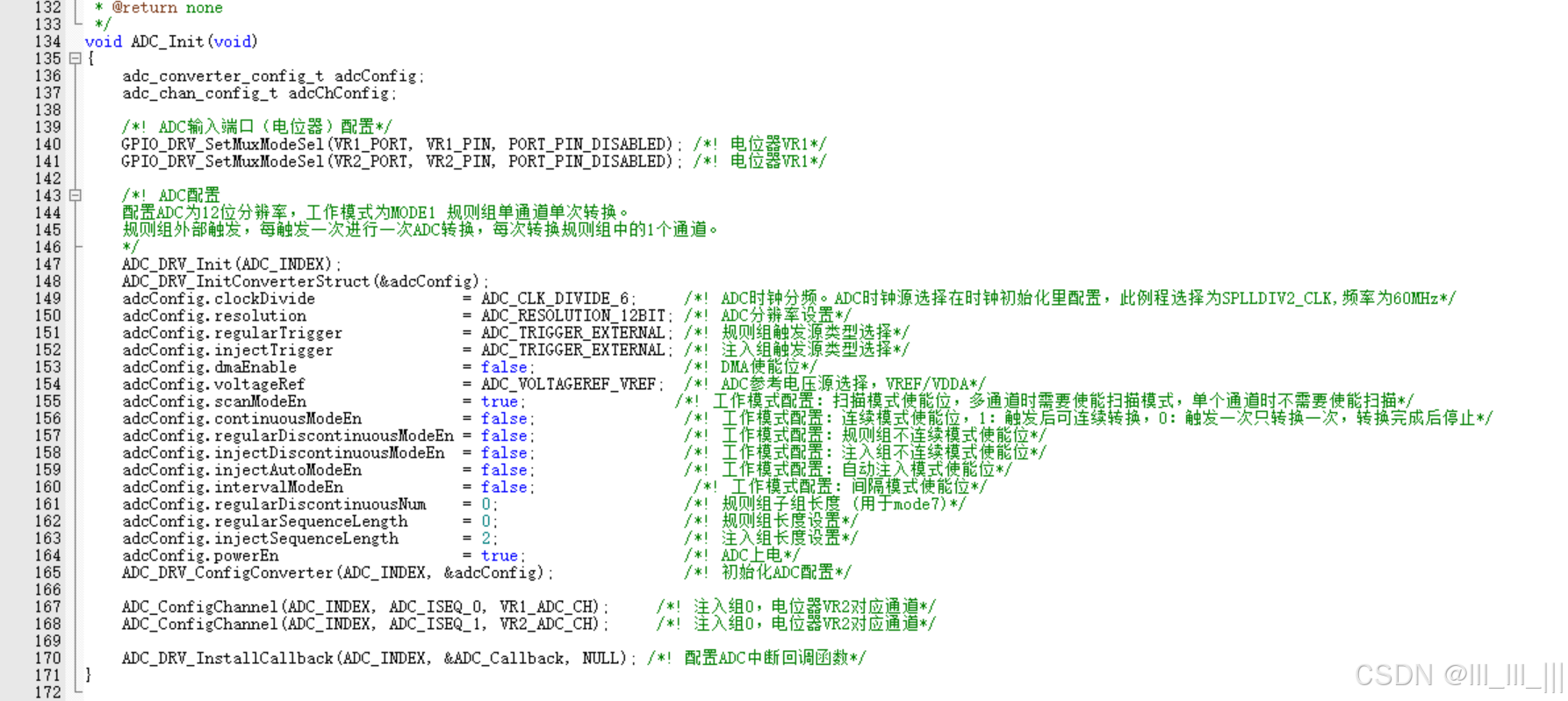
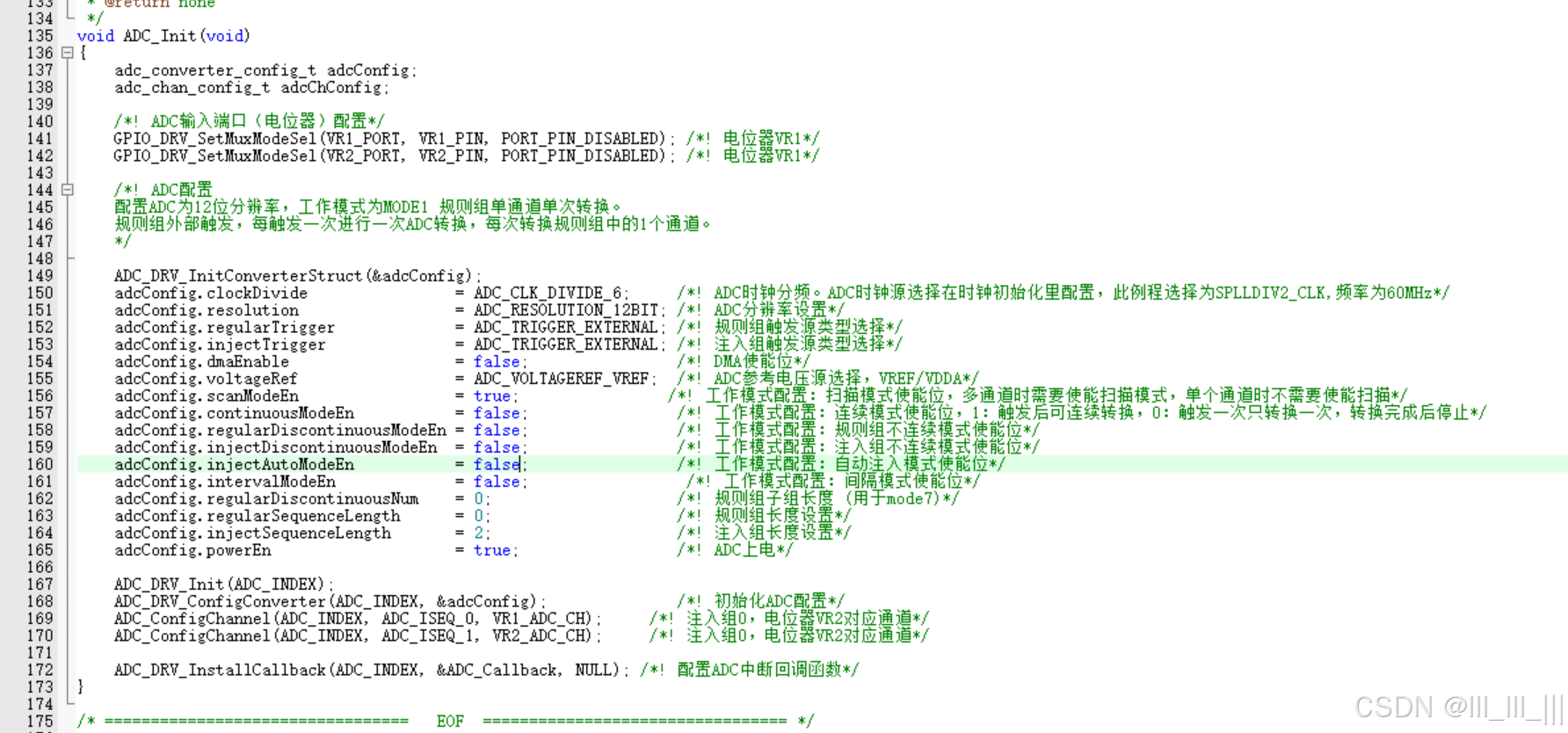
/*! ADC配置
配置ADC为12位分辨率,工作模式为MODE1 规则组单通道单次转换。
规则组外部触发,每触发一次进行一次ADC转换,每次转换规则组中的1个通道。
*/
ADC_DRV_Init(ADC_INDEX);
ADC_DRV_InitConverterStruct(&adcConfig);
adcConfig.clockDivide = ADC_CLK_DIVIDE_6; /*! ADC时钟分频。ADC时钟源选择在时钟初始化里配置,此例程选择为SPLLDIV2_CLK,频率为60MHz*/
adcConfig.resolution = ADC_RESOLUTION_12BIT; /*! ADC分辨率设置*/
adcConfig.regularTrigger = ADC_TRIGGER_EXTERNAL; /*! 规则组触发源类型选择*/
adcConfig.injectTrigger = ADC_TRIGGER_EXTERNAL; /*! 注入组触发源类型选择*/
adcConfig.dmaEnable = false; /*! DMA使能位*/
adcConfig.voltageRef = ADC_VOLTAGEREF_VREF; /*! ADC参考电压源选择,VREF/VDDA*/
adcConfig.scanModeEn = true; /*! 工作模式配置:扫描模式使能位,多通道时需要使能扫描模式,单个通道时不需要使能扫描*/
adcConfig.continuousModeEn = false; /*! 工作模式配置:连续模式使能位,1:触发后可连续转换,0:触发一次只转换一次,转换完成后停止*/
adcConfig.regularDiscontinuousModeEn = true; /*! 工作模式配置:规则组不连续模式使能位*/
adcConfig.injectDiscontinuousModeEn = false; /*! 工作模式配置:注入组不连续模式使能位*/
adcConfig.injectAutoModeEn = false; /*! 工作模式配置:自动注入模式使能位*/
adcConfig.intervalModeEn = false; /*! 工作模式配置:间隔模式使能位*/
adcConfig.regularDiscontinuousNum = 0; /*! 规则组子组长度 (用于mode7)*/
adcConfig.regularSequenceLength = 1; /*! 规则组长度设置*/
adcConfig.injectSequenceLength = 0; /*! 注入组长度设置*/
adcConfig.powerEn = true; /*! ADC上电*/
ADC_DRV_ConfigConverter(ADC_INDEX, &adcConfig); /*! 初始化ADC配置*/
ADC_ConfigChannel(ADC_INDEX, ADC_RSEQ_0, VR1_ADC_CH); /*! 注入组0,电位器VR2对应通道*/
// ADC_SetInjectConversionChannel(ADC_INDEX, ADC_ISEQ_0, VR1_ADC_CH);
// ADC_SetInjectEOCInterruptEnableFlag(ADC_INDEX, ADC_ISEQ_0, 1);
ADC_DRV_InstallCallback(ADC_INDEX, &ADC_Callback, NULL); /*! 配置ADC中断回调函数*/
}
/* ================================= EOF ================================= */
cpp
/*!
* @file pwm_sample.c
*
* @brief This file provides interface for PWM functions.
*/
/* =============================== Includes =============================== */
#include "pwm_sample.h"
#include "pwm_common.h"
#include "pwm_hw.h"
#include "pwm_input.h"
#include "pwm_output.h"
#include "gpio_drv.h"
#include "gpio_hw.h"
#include "string.h"
#include "gpio.h"
/* =============================== Define =============================== */
#define PWM1_INDEX (1U)
/* =============================== Typedef =============================== */
/* =============================== Variables =============================== */
/* ========================= Functions declaration ======================== */
/* ========================= Functions definition ========================= */
/*!
* @brief PWM1中断回调函数
*
* @param[in] none
* @return none
*/
unsigned char aaa = 0;
void PWM1_Callback(uint8_t instance, uint32_t status, void *userData)
{
if ((status & PWM_INIT_CNTOF_Msk) != 0) /*! 溢出中断 */
{
//LED3_TOGGLE;
aaa++;
if(aaa==5)
{
//PWM_DRV_Deinit(PWM1_INDEX);
}
}
}
void PWM1_CH_Callback(uint8_t instance, uint32_t status, void *userData)
{
if (PWM_CH5SCR_CHIF_Msk) /*! 匹配中断 */
{
//LED3_TOGGLE;
}
}
/*!
* @brief PWM 模块初始.
* 将PWM1_CH4和PWM1_CH5配置为独立通道输出PWM,向上计数模式,频率为1KHZ,CH4占空比为30%,CH5占空比为60%
* 使能Init触发,用于ADC模块的硬件触发源
* @param[in] none
* @return none
*/
void PWM1_OutputIndependent_Init(void)
{
pwm_independent_ch_config_t independentChConfig[1];
pwm_modulation_config_t pwmConfig;
pwm_config_t config;
/*! GPIO Configuration for PWM1 */
GPIO_DRV_SetMuxModeSel(PORTA, (gpio_channel_type_t)11U, PORT_MUX_ALT2); /*! PA11: PWM1_CH5 */
/*! Config PWM Interface */
memset(independentChConfig, 0U, sizeof(independentChConfig));
memset(&pwmConfig, 0U, sizeof(pwm_modulation_config_t));
memset(&config, 0U, sizeof(pwm_config_t));
/*!
边沿对齐PWM模式:
周期=(MCVR-CNTIN+1)*PWM计数器时钟周期
占空比=(CHnV-CNTIN+1)*PWM计数器时钟周期
中心对齐PWM模式:
周期=2*(MCVR-CNTIN)*PWM计数器时钟周期
占空比=2*(CH(n)V-CNTIN)*PWM计数器时钟周期
*/
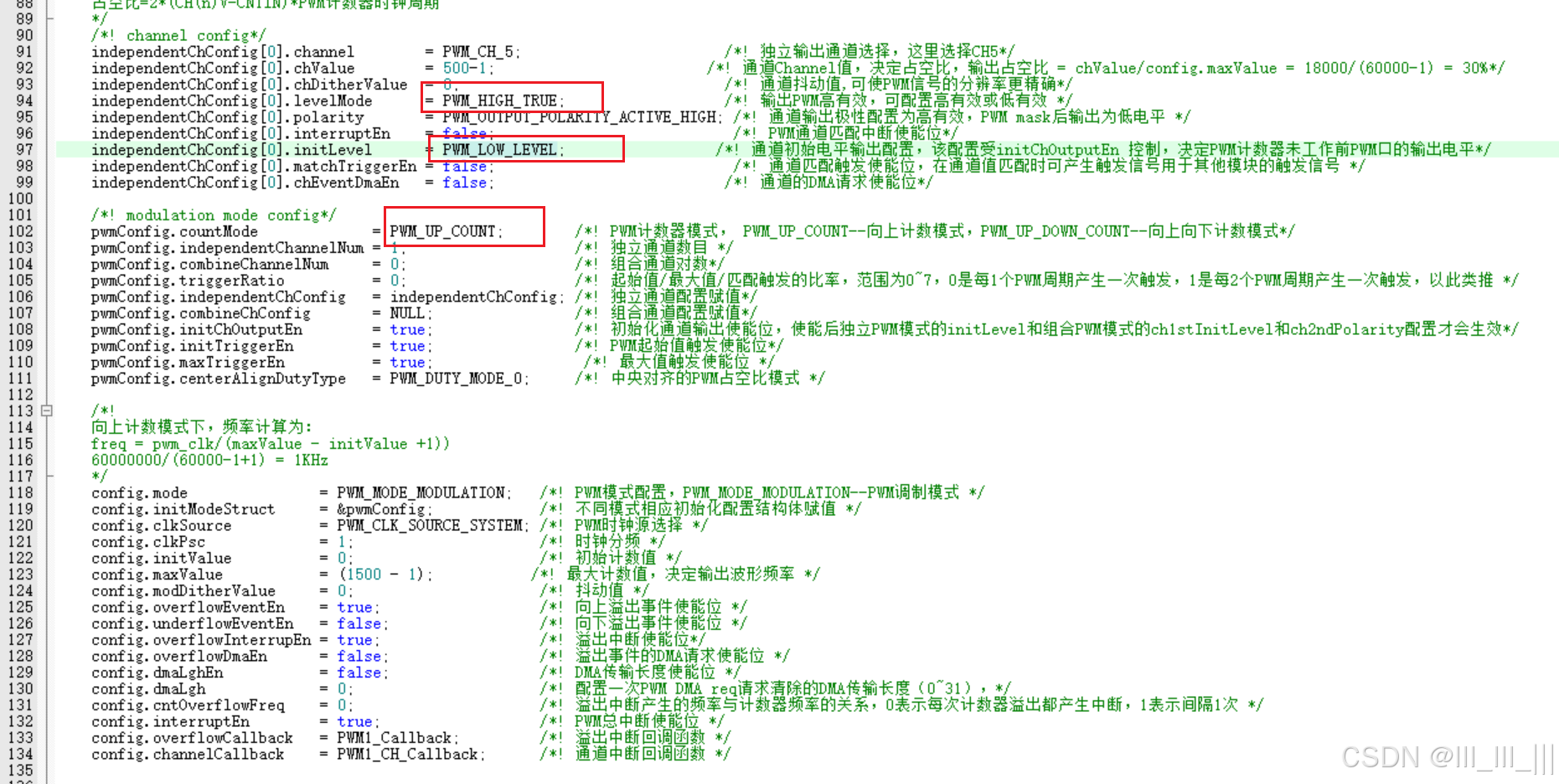
/*! channel config*/
independentChConfig[0].channel = PWM_CH_5; /*! 独立输出通道选择,这里选择CH5*/
independentChConfig[0].chValue = 500-1; /*! 通道Channel值,决定占空比,输出占空比 = chValue/config.maxValue = 18000/(60000-1) = 30%*/
independentChConfig[0].chDitherValue = 0; /*! 通道抖动值,可使PWM信号的分辨率更精确*/
independentChConfig[0].levelMode = PWM_HIGH_TRUE; /*! 输出PWM高有效,可配置高有效或低有效 */
independentChConfig[0].polarity = PWM_OUTPUT_POLARITY_ACTIVE_HIGH; /*! 通道输出极性配置为高有效,PWM mask后输出为低电平 */
independentChConfig[0].interruptEn = false; /*! PWM通道匹配中断使能位*/
independentChConfig[0].initLevel = PWM_LOW_LEVEL; /*! 通道初始电平输出配置,该配置受initChOutputEn 控制,决定PWM计数器未工作前PWM口的输出电平*/
independentChConfig[0].matchTriggerEn = false; /*! 通道匹配触发使能位,在通道值匹配时可产生触发信号用于其他模块的触发信号 */
independentChConfig[0].chEventDmaEn = false; /*! 通道的DMA请求使能位*/
/*! modulation mode config*/
pwmConfig.countMode = PWM_UP_DOWN_COUNT; /*! PWM计数器模式, PWM_UP_COUNT--向上计数模式,PWM_UP_DOWN_COUNT--向上向下计数模式*/
pwmConfig.independentChannelNum = 1; /*! 独立通道数目 */
pwmConfig.combineChannelNum = 0; /*! 组合通道对数*/
pwmConfig.triggerRatio = 0; /*! 起始值/最大值/匹配触发的比率,范围为0~7,0是每1个PWM周期产生一次触发,1是每2个PWM周期产生一次触发,以此类推 */
pwmConfig.independentChConfig = independentChConfig; /*! 独立通道配置赋值*/
pwmConfig.combineChConfig = NULL; /*! 组合通道配置赋值*/
pwmConfig.initChOutputEn = true; /*! 初始化通道输出使能位,使能后独立PWM模式的initLevel和组合PWM模式的ch1stInitLevel和ch2ndPolarity配置才会生效*/
pwmConfig.initTriggerEn = true; /*! PWM起始值触发使能位*/
pwmConfig.maxTriggerEn = true; /*! 最大值触发使能位 */
pwmConfig.centerAlignDutyType = PWM_DUTY_MODE_0; /*! 中央对齐的PWM占空比模式 */
/*!
向上计数模式下,频率计算为:
freq = pwm_clk/(maxValue - initValue +1))
60000000/(60000-1+1) = 1KHz
*/
config.mode = PWM_MODE_MODULATION; /*! PWM模式配置,PWM_MODE_MODULATION--PWM调制模式 */
config.initModeStruct = &pwmConfig; /*! 不同模式相应初始化配置结构体赋值 */
config.clkSource = PWM_CLK_SOURCE_SYSTEM; /*! PWM时钟源选择 */
config.clkPsc = 1; /*! 时钟分频 */
config.initValue = 0; /*! 初始计数值 */
config.maxValue = (1500 - 1); /*! 最大计数值,决定输出波形频率 */
config.modDitherValue = 0; /*! 抖动值 */
config.overflowEventEn = true; /*! 向上溢出事件使能位 */
config.underflowEventEn = false; /*! 向下溢出事件使能位 */
config.overflowInterrupEn = true; /*! 溢出中断使能位*/
config.overflowDmaEn = false; /*! 溢出事件的DMA请求使能位 */
config.dmaLghEn = false; /*! DMA传输长度使能位 */
config.dmaLgh = 0; /*! 配置一次PWM DMA req请求清除的DMA传输长度(0~31),*/
config.cntOverflowFreq = 0; /*! 溢出中断产生的频率与计数器频率的关系,0表示每次计数器溢出都产生中断,1表示间隔1次 */
config.interruptEn = true; /*! PWM总中断使能位 */
config.overflowCallback = PWM1_Callback; /*! 溢出中断回调函数 */
config.channelCallback = PWM1_CH_Callback; /*! 通道中断回调函数 */
PWM_DRV_Init(PWM1_INDEX, &config);
PWM_SetChannelMatchDir(PWM1,PWM_CH_5,PWM_MATCH_DIR_DOWN);
}
/* ================================= EOF ================================= */
cpp
#include "debugout_ac7840x.h"
#include "pwm_sample.h"
#include "clock_config.h"
#include "gpio.h"
#include "adc_sample.h"
#include "osif.h"
/*!
*例程说明:
*1、使用PWM硬件触发ADC采集电位器电压值
*/
/*!
* @brief 时钟配置函数.
*
* @param[in] none
*
* @return none
*/
void SystemClock_Config(void)
{
CKGEN_SYS_Init(g_clockManConfigsArr, CLOCK_MANAGER_CONFIG_CNT,
g_clockManCallbacksArr, CLOCK_MANAGER_CALLBACK_CNT);
CKGEN_DRV_UpdateConfiguration(0, CLOCK_MANAGER_POLICY_AGREEMENT);
}
/*!
* @brief main
*
* @param[in] none
*
* @return 0: success, other: error value
*/
int main(void)
{
SystemClock_Config(); /*! 时钟初始化*/
InitDebug(); /*! 初始化串口打印*/
printf("ADC External signal Trigger Test\r\n");
ADC_Init(); /*! AD初始化*/
PWM1_OutputIndependent_Init(); /*! PWM配置,使能Init触发*/
CTU_ADCTrig_Init(); /*! CTU配置ADC0规则组的硬件触发源为PWM1_Init*/
GPIO_LedInit(); /*! LED初始化*/
while (1)
{
OSIF_TimeDelay(500); /*! tick延时500ms*/
//ADC_PrintTest(); /*! 打印AD数据 */
//RGB_Toggle(); /*! RGB彩灯翻转,指示程序运行*/
}
}5. 增加一路adc
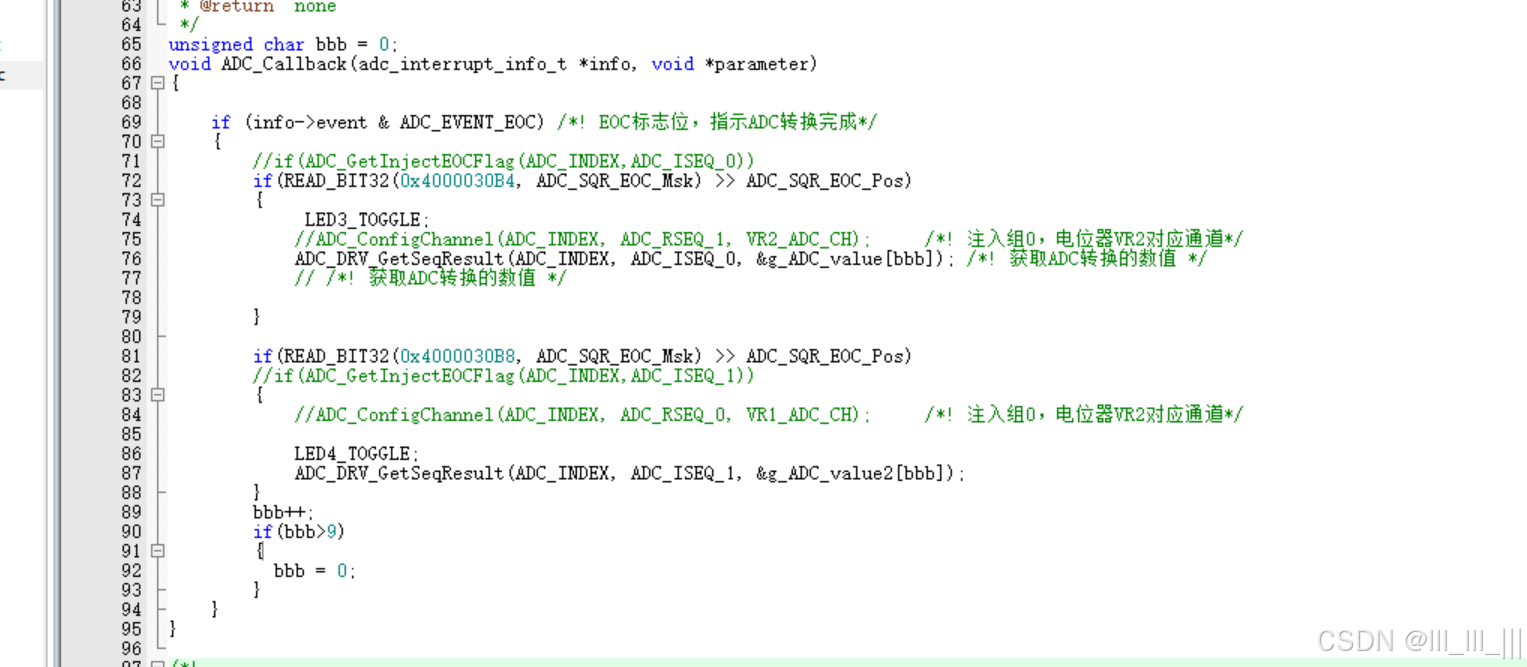
注入组测试,adc配置和ctu配置如下

官方接口使用时候,注入组会丢中断(已反馈,等修复),于是直接使用寄存器来读取
按照正常的流程初始化adc和ctu还有pwm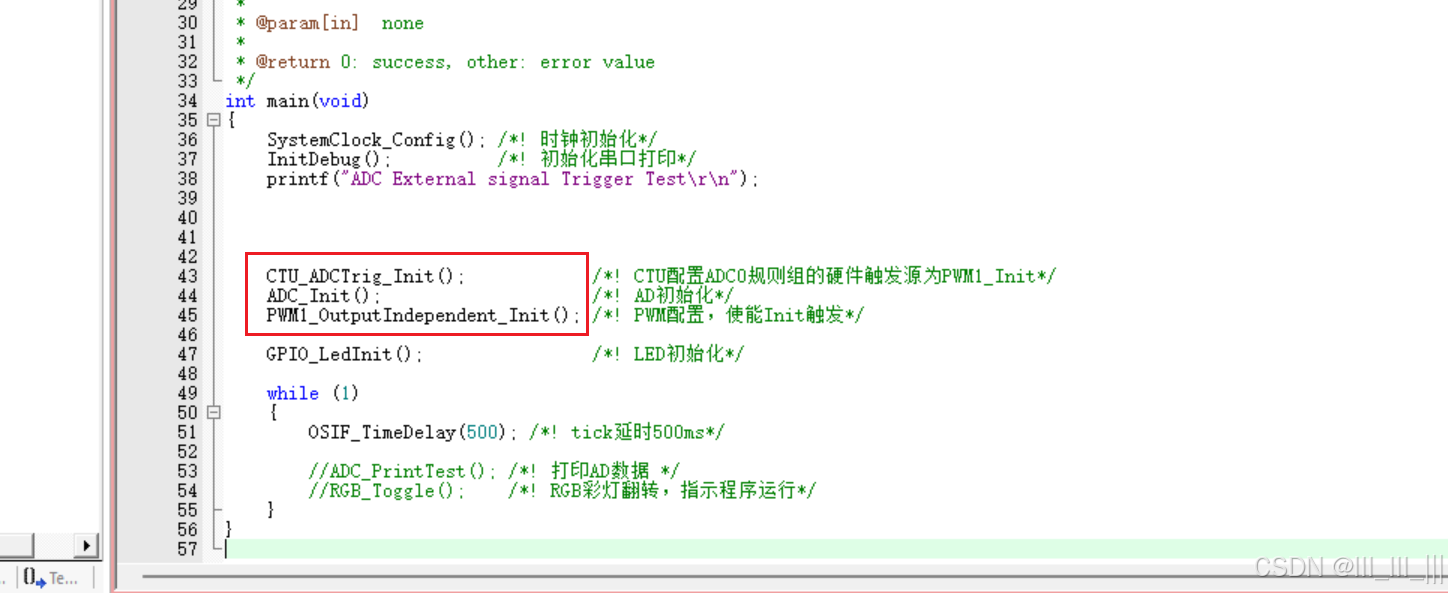
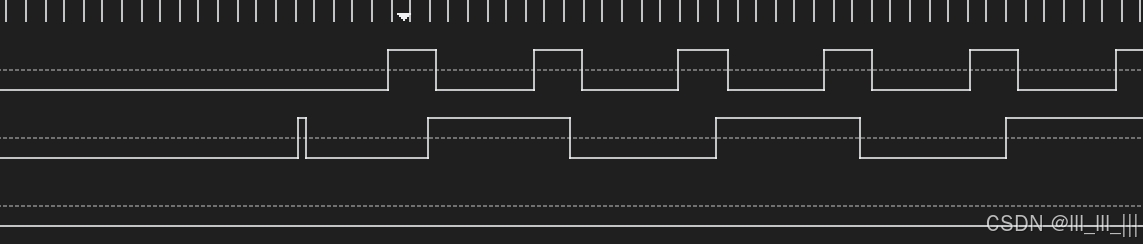
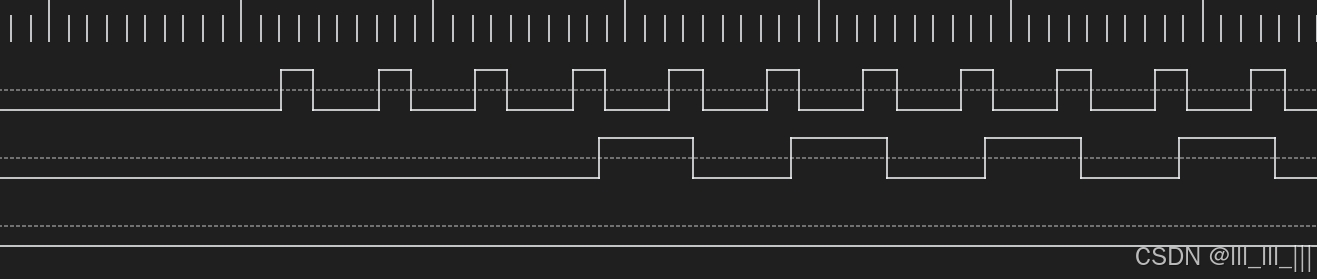
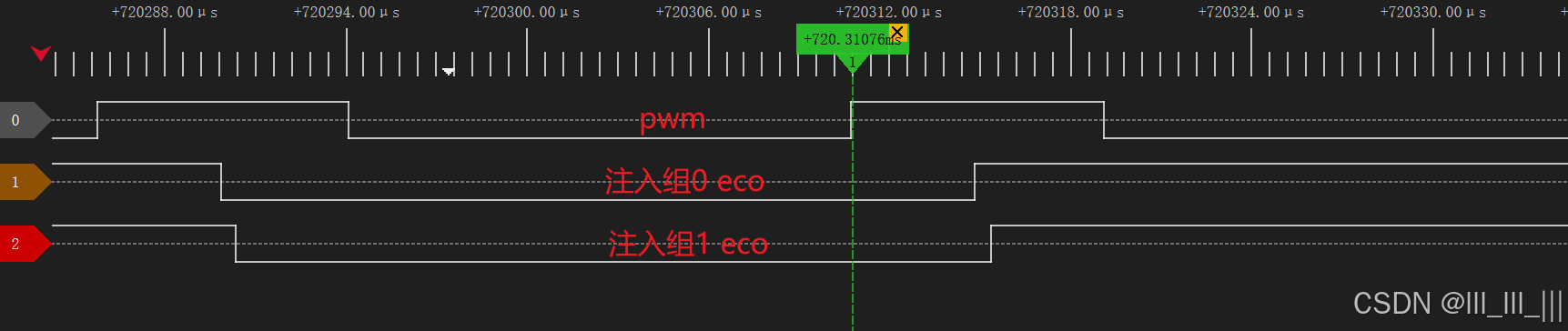
波形如下
初始化时候会有两次adc值,这个可以在计算时候去掉,后续的adc中断都在pwm的高电平有效期之内
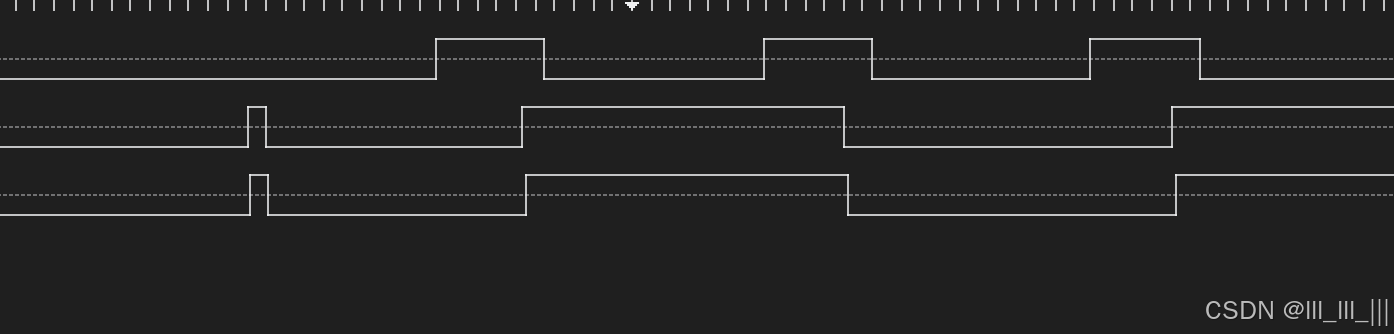
2个中断之间的间隔大概600ns左右,就是一个io翻转的时间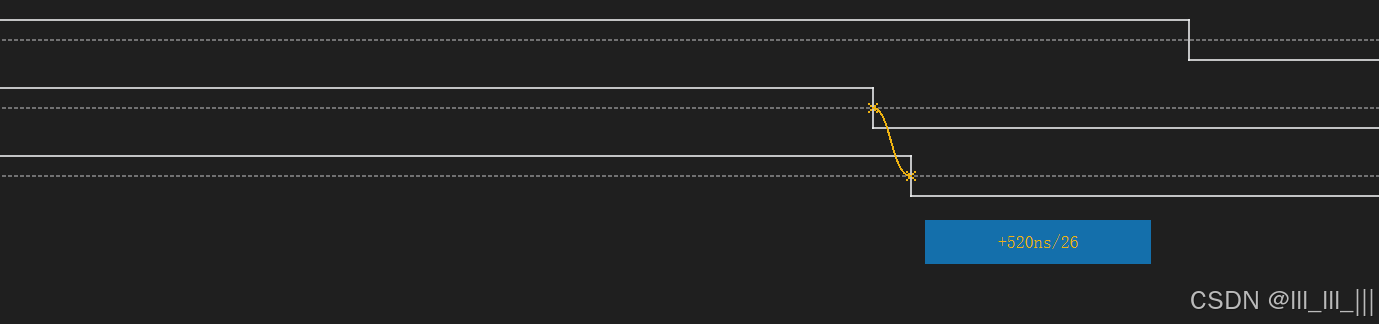
6. 向上计数+init触发+注入组
以上波形看着还是有点奇怪,采样不是在中间采样,像是开结束时候开始采样,如果有多个通道需要采样,就会有部分在低电平时候开始采样。
因此调整一下触发方式和pwm的产生方式
pwm改成向上计数
adc改成init触发

adc配置如下
至少从视觉上能看到是在中间位置了
7. 向上计数+init触发+规则组
测试有异常,遗留问题