文章目录
- [24、RNN - API 基本使用](#24、RNN - API 基本使用)
- [25、RNN 如何预测](#25、RNN 如何预测)
- [26、多层RNN(`num_layers > 1`)](#26、多层RNN(
num_layers > 1)) - [27、RNN - API 进阶使用](#27、RNN - API 进阶使用)
- [28、PyTorch里输入到底有几个------1个 or 2个](#28、PyTorch里输入到底有几个——1个 or 2个)
- 29、代码:
本篇文章紧接着上一篇RNN理论篇:万字长文 · 彻底掌握RNN:原理、隐藏状态、矩阵变换、底层公式、单/Batch 样本处理、计算示例等深度解析
24、RNN - API 基本使用
🌟 场景设定:我们要处理两句话
假设我们有以下两句话(每句 3 个词):
- 句子 A :
["猫", "追", "狗"] - 句子 B :
["我", "爱", "猫"]
我们有一个小词表(共 4 个词):
text
词表 = ["猫", "追", "狗", "我", "爱"] → 共 5 个词
索引: 0 1 2 3 4第一步:把词变成向量(one-hot 编码)
每个词用一个 5 维 one-hot 向量 表示(因为词表大小 = 5):
- "猫" →
[1, 0, 0, 0, 0] - "追" →
[0, 1, 0, 0, 0] - "狗" →
[0, 0, 1, 0, 0] - "我" →
[0, 0, 0, 1, 0] - "爱" →
[0, 0, 0, 0, 1]
所以:
-
句子 A →
python[ [1, 0, 0, 0, 0], # "猫" [0, 1, 0, 0, 0], # "追" [0, 0, 1, 0, 0] # "狗" ] -
句子 B →
python[ [0, 0, 0, 1, 0], # "我" [0, 0, 0, 0, 1], # "爱" [1, 0, 0, 0, 0] # "猫" ]
第二步:把两个句子叠成一个三维张量(这就是 RNN 的输入!)
python
import torch
x = torch.tensor([
[ # ← 句子 A
[1., 0., 0., 0., 0.], # 第1个词:"猫"
[0., 1., 0., 0., 0.], # 第2个词:"追"
[0., 0., 1., 0., 0.] # 第3个词:"狗"
],
[ # ← 句子 B
[0., 0., 0., 1., 0.], # 第1个词:"我"
[0., 0., 0., 0., 1.], # 第2个词:"爱"
[1., 0., 0., 0., 0.] # 第3个词:"猫"
]
])✅ 这个 x 的形状是 (2, 3, 5),含义:
2:2 个句子(batch size = 2)3:每句 3 个词(sequence length = 3)5:每个词是 5 维向量(input_size = 5)
🔔 这就是 RNN 的标准输入格式(当
batch_first=True时)
⚙️ 第三步:创建 RNN 层(解释每个参数)
python
import torch.nn as nn
rnn = nn.RNN(
input_size=5, # ✅ 必须等于 x 的最后一维(5) (注意:只针对第0层RNN,后面有详情)
hidden_size=2, # ✅ 我们希望"记忆"是 2 维的(比如 [开心程度, 动作强度])。
num_layers=1, # 先用 1 层(简单)
batch_first=True, # ✅ 关键!让输入是 (句子数, 词数, 词维)
bias=True, # 加偏置(默认 True,先不管)
nonlinearity='tanh' # 激活函数(默认 tanh)
)💡
hidden_size=2是什么意思?就是说,机器人每读一个词,会更新一个 2 维的记忆向量 ,比如
[0.3, -0.7]。这个向量会传给下一个词。
注意:input_size=5 只是针对第0层RNN,如果 num_layers 大于 1,之后的RNN层的 input_size 就不是5了,后面有详情
🔄 第四步:运行 RNN,看它返回什么
python
# 前向传播
output, hidden = rnn(x)RNN 会返回 两个东西:
🔹 返回值 1:output ------ 所有时刻的记忆
- 含义 :对每个句子,记录它在每个词之后的记忆。
- 形状 :
(batch_size, seq_len, hidden_size) = (2, 3, 2)
python
print("output.shape =", output.shape) # (2, 3, 2)output[0]→ 句子 A 的 3 个记忆(读完第1、2、3个词后)output[1]→ 句子 B 的 3 个记忆
具体来说:
output[0, 0, :]= 句子 A 读完"猫"后的记忆(2 维)output[0, 1, :]= 句子 A 读完"追"后的记忆output[0, 2, :]= 句子 A 读完"狗"后的记忆(最终记忆)
同理:
output[1, 2, :]= 句子 B 读完"猫"后的最终记忆
🔹 返回值 2:hidden ------ 最后一刻的记忆
- 含义 :只取最后一个词之后的记忆(常用于分类任务)
- 形状 :
(num_layers, batch_size, hidden_size) = (1, 2, 2)
python
print("hidden.shape =", hidden.shape) # (1, 2, 2)hidden[0, 0, :]= 句子 A 的最终记忆hidden[0, 1, :]= 句子 B 的最终记忆
✅ 并且:
hidden[0, 0, :] == output[0, -1, :]
hidden[0, 1, :] == output[1, -1, :]
🧪 第五步:完整代码 + 打印结果
python
import torch
import torch.nn as nn
torch.manual_seed(66)
# 输入:2 个句子,每句 3 个词,每个词 5 维
x = torch.tensor([
[[1., 0., 0., 0., 0.], [0., 1., 0., 0., 0.], [0., 0., 1., 0., 0.]], # 句子 A
[[0., 0., 0., 1., 0.], [0., 0., 0., 0., 1.], [1., 0., 0., 0., 0.]] # 句子 B
])
# 创建 RNN
rnn = nn.RNN(input_size=5, hidden_size=2, batch_first=True)
# 前向计算
output, hidden = rnn(x)
# 打印形状
print("输入 x 形状:", x.shape) # (2, 3, 5)
print("output 形状:", output.shape) # (2, 3, 2)
print("hidden 形状:", hidden.shape) # (1, 2, 2)
# 打印具体内容(数值每次运行可能不同,因为权重随机初始化)
print("\n句子 A 的记忆序列(output[0]):")
print(output[0])
# tensor([[0.6412, 0.7201],
# [0.3475, 0.4216],
# [0.4970, 0.4756]], grad_fn=<SelectBackward0>)
print("\n句子 B 的记忆序列(output[1]):")
print(output[1])
# tensor([[0.6981, 0.7617],
# [0.9120, 0.0942],
# [0.5178, 0.3952]], grad_fn=<SelectBackward0>)
print("\n句子 A 的最终记忆(hidden[0, 0]):")
print(hidden[0, 0])
# tensor([0.4970, 0.4756], grad_fn=<SelectBackward0>)
print("\n验证:hidden[0,0] 是否等于 output[0, -1]?")
print(torch.allclose(hidden[0, 0], output[0, -1])) # True📌 第六步:关键总结(用两个句子举例)
| 问题 | 答案 |
|---|---|
| RNN 输入是什么? | 一批句子,每个词是向量 → 形状 (2, 3, 5) |
input_size=5 为什么? |
因为每个词是 5 维(词表大小=5) |
hidden_size=2 代表什么? |
每个句子在每个时刻都有一个 2 维"记忆" |
output 是什么? |
所有时刻的记忆 → (2, 3, 2) • 第0行:句子A的3个记忆 • 第1行:句子B的3个记忆 |
hidden 是什么? |
最后时刻的记忆 → (1, 2, 2) • hidden[0,0] = 句子A最终记忆 • hidden[0,1] = 句子B最终记忆 |
output 和 hidden 有什么关系? |
hidden[0, i] == output[i, -1](对每个句子 i 都成立) |
❓ 常见疑问解答
Q:为什么 hidden 的第一维是 1?
因为 num_layers=1。如果你堆了 2 层 RNN,那就有 2 个最终记忆(每层一个),hidden 就会是 (2, 2, 2)。
Q:我可以只用 hidden 吗?
✅ 可以!比如做情感分析:
- 用
hidden[0, 0]判断句子 A 是正面还是负面 - 用
hidden[0, 1]判断句子 B
Q:如果我想用每个词的记忆(比如做词性标注)?
✅ 用 output!
output[0, 0]→ 给"猫"打标签output[0, 1]→ 给"追"打标签- ...
❤️ 最后提醒
- 始终设置
batch_first=True,否则输入要写成(3, 2, 5),非常反直觉。 input_size必须匹配你词向量的维度。output包含全过程,hidden只包含最后一步。- 两个句子的计算是完全独立的!RNN 不会把句子 A 的记忆混到句子 B 里。
25、RNN 如何预测
不涉及复杂公式,不用先验知识,只用你熟悉的两个句子 + 一个目标:让 RNN 学会"猜下一个词"。
🎯 一、RNN 预测的核心思想(一句话)
RNN 通过"记住前面说了什么",来预测"接下来最可能说什么"。
就像你读到 "我 爱 ___",大脑会自动想到 "猫"、"你"、"巧克力"......
RNN 做的,就是这件事------只不过它用的是数学和向量。
🧩 二、举个具体例子
假设我们有大量类似这样的句子:
- "猫 追 狗"
- "狗 追 猫"
- "我 爱 猫"
- "我 爱 你"
我们的目标是:
👉 给定前两个词,让 RNN 预测第三个词。
比如:
- 输入:"我 爱" → 预测:"猫" 或 "你"
- 输入:"猫 追" → 预测:"狗"
这就是语言建模(Language Modeling),也是 RNN 最经典的预测任务。
🔧 三、RNN 预测需要哪些组件?
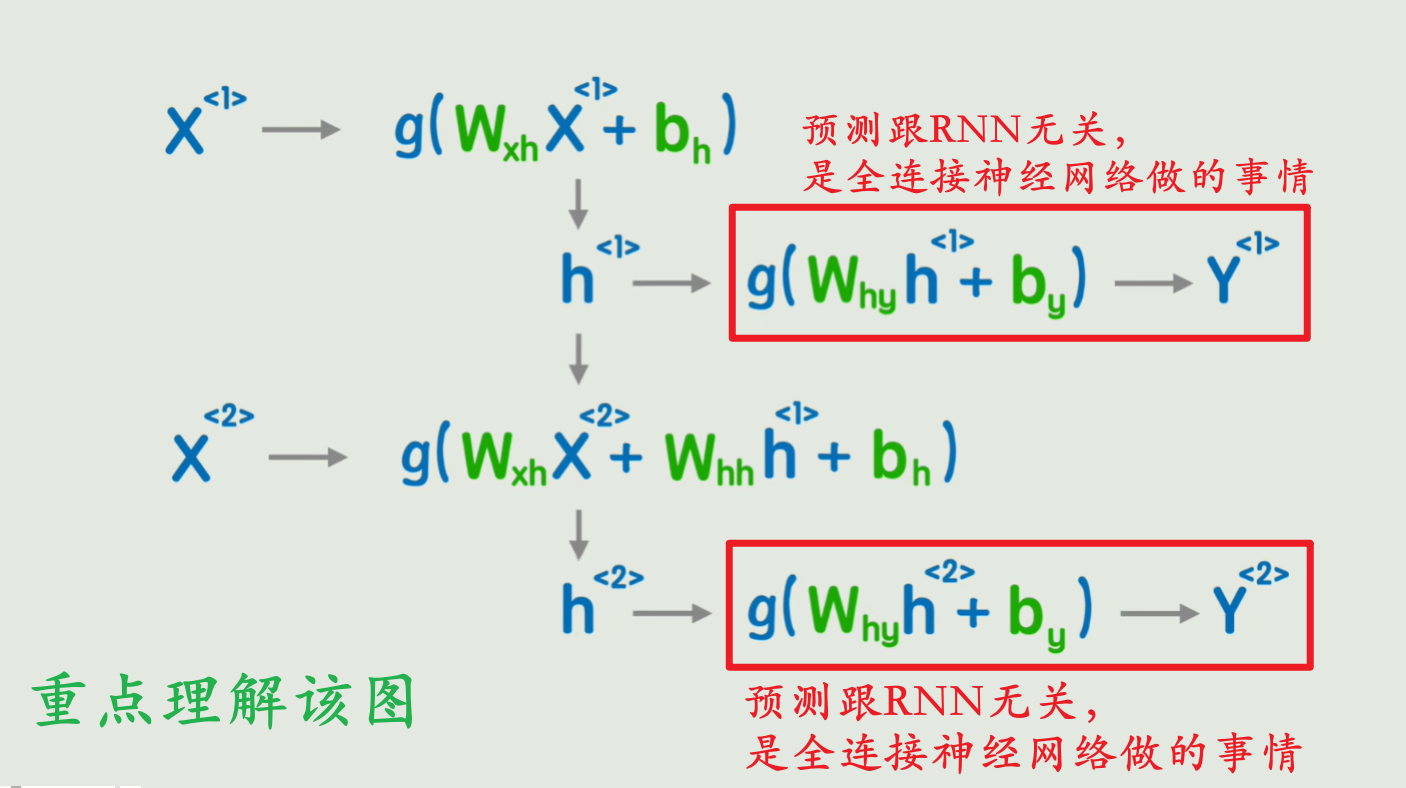
要完成预测,RNN 模型其实包含 两个部分:
| 组件 | 作用 | PyTorch 对应 |
|---|---|---|
| 1. RNN 层 | 读入词序列,生成"记忆"(隐藏状态 h) |
nn.RNN(...) |
| 2. 输出层 | 把"记忆"转换成"对每个词的打分" | nn.Linear(hidden_size, vocab_size) |
✅ 注意:
nn.RNN本身不直接输出预测结果 !它只负责生成
h。真正的预测靠后面的线性层。
🔄 四、预测的完整流程(一步一步)
我们以输入 "我 爱" 为例,看看 RNN 怎么一步步预测下一个词。
步骤 1️⃣:把词变成向量
词表 = ["猫", "追", "狗", "我", "爱"] → 共 5 个词
- "我" →
[0, 0, 0, 1, 0] - "爱" →
[0, 0, 0, 0, 1]
输入张量:
python
x = [
[0, 0, 0, 1, 0], # "我"
[0, 0, 0, 0, 1] # "爱"
] # 形状 (2, 5)(实际代码中会加 batch 维度 → (1, 2, 5))
步骤 2️⃣:RNN 读入这两个词,生成"最终记忆"
python
rnn = nn.RNN(input_size=5, hidden_size=4, batch_first=True)
output, hidden = rnn(x.unsqueeze(0)) # x 变成 (1, 2, 5)hidden的形状是(1, 1, 4)hidden[0, 0, :]就是 RNN 读完 "我 爱" 后的内部记忆(一个 4 维向量)
💡 这个向量编码了:"前面说了'我 爱',现在情绪是温暖的,大概率接一个名词或人称"
步骤 3️⃣:用这个"记忆"去预测下一个词
我们加一个输出层(全连接层):
python
linear = nn.Linear(in_features=4, out_features=5) # 5 = 词表大小
logits = linear(hidden[0, 0, :]) # 得到一个 5 维向量logits = [2.1, -0.5, 1.8, -1.0, 0.3]- 每个数字对应一个词的"得分":
- 索引 0("猫"): 2.1 ← 最高!
- 索引 1("追"): -0.5
- 索引 2("狗"): 1.8
- 索引 3("我"): -1.0
- 索引 4("爱"): 0.3
步骤 4️⃣:把得分转成"概率"
用 softmax 把得分变成概率:
python
probs = torch.softmax(logits, dim=0)
# probs ≈ [0.60, 0.05, 0.30, 0.01, 0.04]✅ 解读:
- 下一个词是 "猫" 的概率 ≈ 60%
- 是 "狗" 的概率 ≈ 30%
- 其他词概率很低
步骤 5️⃣:做出预测
- 取最大概率 :
predicted_index = probs.argmax()→0 - 查词表 :
word = vocab[0]→"猫"
🎉 预测结果:"我 爱 猫"
🟩 🔒 重要限制:模型只能预测词库中的词!
RNN 的预测结果永远只能是训练时构建的词表(vocabulary)里的词。
为什么?因为输出层的大小是 vocab_size,每个位置对应词表中的一个词。
模型根本不知道词表之外的词长什么样------它连这些词的 ID 都没有!
例如,如果你的词表是 ["猫", "追", "狗", "我", "爱"],那么模型永远不可能输出:
"月亮""悲伤""周杰伦"
即使这些词在语义上很合理,只要它们没出现在训练词表里,模型就无法生成。
💡 这不是缺陷,而是这类模型的基本设计:它通过组合已知词来创造新句子,而不是发明新词 。
在歌词生成任务中,只要词表覆盖了原歌词的大部分词汇,效果就会很好。
📊 五、训练 vs 预测的区别(关键!)
| 阶段 | 输入 | 目标 | RNN 做什么 |
|---|---|---|---|
| 训练 | 完整句子(如 "我 爱 猫") | 让模型学会:看到 "我 爱" 就输出 "猫" | 用真实标签计算损失,更新权重 |
| 预测(推理) | 部分句子(如 "我 爱") | 生成最可能的下一个词 | 用学到的权重做前向传播,输出概率 |
🔔 训练时,RNN 会同时看到所有词 ;
预测时,RNN 只能看到已有的词,然后猜下一个。
🧠 六、为什么能预测?------因为"记忆"包含了上下文
RNN 的魔法在于:
- 读第一个词 → 产生初步记忆
- 读第二个词 → 结合新词 + 旧记忆 → 更新记忆
- 最终记忆 = 整个上下文的压缩表示
所以:
- "我 爱" → 记忆偏向"情感+人称"
- "猫 追" → 记忆偏向"动作+动物"
不同的上下文 → 不同的记忆 → 不同的预测!
🛠️ 七、PyTorch 完整预测代码(极简版)
python
import torch
import torch.nn as nn
torch.manual_seed(66)
# 词表
vocab = ["猫", "追", "狗", "我", "爱"]
vocab_size = len(vocab)
# 模型
rnn = nn.RNN(input_size=vocab_size, hidden_size=4, batch_first=True)
linear = nn.Linear(4, vocab_size)
# 输入:"我 爱"
x = torch.tensor([[[0,0,0,1,0], [0,0,0,0,1]]], dtype=torch.float32) # (1, 2, 5)
# 前向传播
_, hidden = rnn(x) # hidden: (1, 1, 4)
logits = linear(hidden[0, 0]) # (5,)
probs = torch.softmax(logits, dim=0)
# 预测
pred_idx = probs.argmax().item()
print(f"预测下一个词是: {vocab[pred_idx]}") # 爱 (注意, 这里的全连接神经网络没有经过训练,预测错非常正常)
print(f"各词概率: {dict(zip(vocab, probs.tolist()))}")
# {'猫': 0.1471, '追': 0.1489, '狗': 0.1734, '我': 0.1424, '爱': 0.3880} # 只截取了前4位小数✅ 八、总结:RNN 预测的 5 个关键点
- RNN 本身不直接预测 ,它只生成"记忆"(隐藏状态
h)。 - 真正的预测靠一个额外的线性层 (
Linear(hidden_size, vocab_size))。 - 预测是逐词进行的:给前 n 个词,猜第 n+1 个词。
- "记忆"
h编码了所有历史信息,是预测的核心。 - 训练时用完整句子监督学习,预测时用部分句子生成新内容。
你现在可以自信地说:
"我知道 RNN 是怎么预测的了!它不是魔法,而是一个'读上下文 → 生成记忆 → 打分选词'的过程。"
26、多层RNN(num_layers > 1)
下面我将为你完整、清晰、逐层、逐维度地解释多层 RNN(num_layers > 1)中数据的流动过程 ,并使用一组精心设计的、各维度互不相同的数值 ,避免像 (2,2) 这样容易混淆的情况。
我们将以 num_layers = 3 的 RNN 为例,配合详细的 NLP 场景解释和张量形状追踪,确保你彻底理解每一层的输入/输出是什么、为什么这样设计、以及 PyTorch 是如何自动处理维度匹配的。
🧩 一、设定一个"全不同"的例子(避免任何维度重复)
我们设定以下超参数(全部不同):
| 参数 | 值 | NLP 含义 |
|---|---|---|
batch_size |
4 | 一批中有 4 个句子 |
seq_len |
6 | 每个句子有 6 个词 (不足补 <PAD>) |
input_size |
10 | 每个词用 10 维词向量 表示(如来自 nn.Embedding) |
hidden_size |
8 | RNN 隐藏状态维度为 8 |
num_layers |
3 | 使用 3 层 RNN 堆叠 |
✅ 所有数字都不同:4, 6, 10, 8, 3 → 不会混淆!
我们使用 batch_first=True(推荐),所以输入形状为:
python
x.shape = (4, 6, 10)
# 含义:(4个句子, 每句6个词, 每个词10维向量)🏗️ 二、构建 RNN 模型
python
import torch
import torch.nn as nn
rnn = nn.RNN(
input_size=10, # 第0层的输入维度(原始词向量)
hidden_size=8, # 所有层的隐藏状态维度
num_layers=3, # 3层堆叠
batch_first=True # 输入/输出格式:(batch, seq_len, *)
)🔍 注意:虽然只写了一个
input_size=10,但 只有第 0 层用它 ,第 1、2 层的输入维度会自动设为hidden_size=8。
🔁 三、逐层数据流动详解(核心部分)
▶ 第 0 层(底层,Layer 0)
-
输入:原始词向量
pythonx₀ = x # shape: (4, 6, 10)- 4 个句子
- 每句 6 个词
- 每个词 10 维
-
RNN 权重:
weight_ih_l0: shape(8, 10)→ 将 10 维输入映射到 8 维隐藏状态weight_hh_l0: shape(8, 8)
-
输出(即该层对每个词的理解):
pythonout₀ = [h₀₀, h₀₁, ..., h₀₅] # 共6个时间步 out₀.shape = (4, 6, 8)- 4 个句子
- 每句 6 个词
- 每个词被表示为 8 维上下文向量
✅ 这一层完成了:从原始词向量 → 初级上下文表示
▶ 第 1 层(中间层,Layer 1)
-
输入 :第 0 层的输出
out₀pythonx₁ = out₀ # shape: (4, 6, 8)- 不再看原始 10 维词向量!
- 而是看第 0 层对每个词的 8 维理解
-
RNN 权重(PyTorch 自动创建):
weight_ih_l1: shape(8, 8)← 输入维度是 8,不是 10!weight_hh_l1: shape(8, 8)
-
输出:
pythonout₁ = [h₁₀, h₁₁, ..., h₁₅] out₁.shape = (4, 6, 8)
✅ 这一层完成了:在初级理解基础上,提炼更抽象的语义特征
▶ 第 2 层(顶层,Layer 2)
-
输入 :第 1 层的输出
out₁pythonx₂ = out₁ # shape: (4, 6, 8) -
RNN 权重:
weight_ih_l2: shape(8, 8)weight_hh_l2: shape(8, 8)
-
输出:
pythonout₂ = [h₂₀, h₂₁, ..., h₂₅] out₂.shape = (4, 6, 8)
✅ 这一层输出的是最终的、最高层次的序列表示
📤 四、最终返回值
调用 output, h_n = rnn(x) 后:
output
-
就是 最后一层(第 2 层)的输出
out₂
python
output.shape = (4, 6, 8)- 用途:做序列标注任务(如 NER、POS 标注),对每个词预测标签
h_n(final hidden state)
-
包含 每一层最后一个时间步的隐藏状态
python
h_n.shape = (3, 4, 8)
# 第0维:3层 → [layer0_final_h, layer1_final_h, layer2_final_h]
# 第1维:4个句子
# 第2维:8维隐藏状态-
提取整句表示(用于文本分类):
pythonsentence_vector = h_n[-1] # 取最后一层 → shape: (4, 8)
🔍 五、验证:查看各层权重形状(证明维度自动匹配)
python
print("第0层 weight_ih_l0:", rnn.weight_ih_l0.shape) # torch.Size([8, 10])
print("第1层 weight_ih_l1:", rnn.weight_ih_l1.shape) # torch.Size([8, 8]) ← 关键!
print("第2层 weight_ih_l2:", rnn.weight_ih_l2.shape) # torch.Size([8, 8])✅ 第 1、2 层的输入权重都是 (8, 8),说明它们的输入维度确实是 8,和上一层的输出匹配!
🧪 六、完整可运行代码(带注释)
python
import torch
import torch.nn as nn
# === 超参数(全不同)===
batch_size = 4 # 4个句子
seq_len = 6 # 每句6个词
input_size = 10 # 词向量10维
hidden_size = 8 # 隐藏状态8维
num_layers = 3 # 3层RNN
# === 构建模型 ===
rnn = nn.RNN(
input_size=input_size,
hidden_size=hidden_size,
num_layers=num_layers,
batch_first=True
)
# === 模拟输入 ===
x = torch.randn(batch_size, seq_len, input_size)
print("输入 x shape:", x.shape) # (4, 6, 10)
# === 前向传播 ===
output, h_n = rnn(x)
print("\n最终 output shape:", output.shape) # (4, 6, 8)
print("最终 h_n shape:", h_n.shape) # (3, 4, 8)
# === 验证各层权重维度 ===
print("\n各层输入权重形状:")
print("Layer 0 (weight_ih_l0):", rnn.weight_ih_l0.shape) # (8, 10)
print("Layer 1 (weight_ih_l1):", rnn.weight_ih_l1.shape) # (8, 8)
print("Layer 2 (weight_ih_l2):", rnn.weight_ih_l2.shape) # (8, 8)输出:
输入 x shape: torch.Size([4, 6, 10])
最终 output shape: torch.Size([4, 6, 8])
最终 h_n shape: torch.Size([3, 4, 8])
各层输入权重形状:
Layer 0 (weight_ih_l0): torch.Size([8, 10])
Layer 1 (weight_ih_l1): torch.Size([8, 8])
Layer 2 (weight_ih_l2): torch.Size([8, 8])✅ 一切维度对齐,无任何冲突!
🧠 七、关键总结(一句话记住)
在
nn.RNN(..., num_layers=N)中:
- 第 0 层 的输入维度 =
input_size- 第 1 ~ N-1 层 的输入维度 =
hidden_size- PyTorch 自动为每层创建匹配的权重矩阵,你无需手动处理维度衔接
📌 附:LSTM / GRU 是否相同?
✅ 完全相同!
例如:
python
lstm = nn.LSTM(input_size=10, hidden_size=8, num_layers=3, batch_first=True)- 第 0 层输入:
(4,6,10)→ 权重(8,10) - 第 1、2 层输入:
(4,6,8)→ 权重(8,8) - 返回
(output, (h_n, c_n)),其中h_n.shape = (3,4,8)
希望这份维度全不同、逐层拆解、带验证代码 的解释,能让你对多层 RNN 的数据流彻底、永久地理解清楚!
27、RNN - API 进阶使用
一、nn.RNN 的完整参数详解
python
torch.nn.RNN(
input_size, # 必须 | int | 每个时间步输入特征的维度(如词向量维度)
hidden_size, # 必须 | int | 隐藏状态的维度,也是每层输出的特征数
num_layers=1, # 可选 | int | RNN 堆叠层数,默认 1;>1 时可在层间加 dropout
nonlinearity='tanh', # 可选 | str | 激活函数,仅支持 'tanh' 或 'relu';仅在单层单向时生效,通常保持默认
bias=True, # 可选 | bool | 是否使用偏置项;默认 True,一般不修改
batch_first=False, # 可选 | bool | 若为 True,输入/输出形状为 (batch, seq, feature);NLP 中常设为 True
dropout=0.0, # 可选 | float | 层间 dropout 概率(仅作用于非最后一层);仅当 num_layers > 1 时生效
bidirectional=False, # 可选 | bool | 是否使用双向 RNN;若为 True,输出维度变为 2 * hidden_size
device=None, # 可选 | torch.device | 指定模块所在设备(如 'cpu' 或 'cuda');通常用 .to(device) 设置
dtype=None # 可选 | torch.dtype | 指定参数数据类型(如 torch.float32);通常保持默认
)input_size: int
- 作用:每个时间步输入向量的维度。
- 示例 :
- 词嵌入维度为 300 →
input_size=300 - 时间序列每步有 5 个特征 →
input_size=5
- 词嵌入维度为 300 →
- 必须匹配:输入张量的最后一维。
hidden_size: int
- 作用:RNN 隐藏状态的维度,也是每一层输出的特征数。
- 注意 :
- 若
bidirectional=True,最终输出和最后一层隐藏状态的维度为2 * hidden_size; - 但
h_n中每个方向仍单独保存为hidden_size。
- 若
num_layers: int = 1
- 作用:堆叠的 RNN 层数。
- 行为 :
- 第 1 层接收原始输入;
- 第 2 层接收第 1 层所有时间步的输出作为输入;
- 所有层都处理整个序列(不是只处理一个时间步)。
- 典型值:1~3。层数越多,模型越深,但也更容易梯度消失。
nonlinearity: str = 'tanh'
- 可选值 :
'tanh'或'relu' - 限制 :
- 仅支持单层、单向 RNN(即
num_layers == 1且bidirectional == False); - 即便如此,在某些 PyTorch 版本或 CUDA 环境下,CUDNN 后端可能不支持 ReLU,导致回退到 CPU 或报错;
- 仅支持单层、单向 RNN(即
- 建议 :保持默认
'tanh',除非明确需要且在 CPU 上调试。
bias: bool = True
- 作用:是否启用偏置项。
- 影响 :若设为
False,则不创建bias_ih和bias_hh参数。 - 通常保留为
True。
batch_first: bool = False⭐⭐⭐(重点!)
-
决定输入/输出张量的布局:
batch_first输入 x形状输出 output形状False(默认)(seq_len, batch, input_size)(seq_len, batch, output_size)True(batch, seq_len, input_size)(batch, seq_len, output_size) -
推荐:
- NLP 任务中通常设为
True,便于与DataLoader输出对齐; - 时间序列或传统任务可保留
False。
- NLP 任务中通常设为
💡 注意:
h_0和h_n的形状不受batch_first影响!
dropout: float = 0.0
- 作用 :在非最后一层的输出上应用 dropout。
- 生效条件 :仅当
num_layers > 1时有效。 - 机制 :
- 对第 0 层到第
num_layers-2层的输出做 dropout; - 最后一层(
num_layers-1)不做 dropout。
- 对第 0 层到第
- 典型值:0.2 ~ 0.5
bidirectional: bool = False【 bidirectional adj.双向的 】
- 作用:是否使用双向 RNN。
- 效果 :
- 每层会运行两个独立的 RNN:一个正向处理序列,一个反向处理;
- 最终输出会在隐藏维度上拼接,因此输出特征维度变为
2 * hidden_size; - 参数数量翻倍(因为有两套权重)。
device/dtype
- 用于指定模块的设备(CPU/GPU)和数据类型(如
torch.float32)。 - 通常通过
.to(device)设置,无需在初始化时指定。
二、输入张量 input 的形状要求
标准格式(三维张量):
python
# batch_first=False(默认)
input: (L, N, H_in)
# batch_first=True
input: (N, L, H_in)L= sequence length(序列长度)N= batch size(批次大小)H_in=input_size
示例:
python
# 场景:3 个句子,最长 5 个词,词向量维度 100
x = torch.randn(3, 5, 100) # (batch, seq, embed)
rnn = nn.RNN(100, 64, batch_first=True)
output, h_n = rnn(x)⚠️ 重要 :
nn.RNN不会自动跳过 padding 位置 !如果你的 batch 中包含不同长度的序列,必须使用pack_padded_sequence+pad_packed_sequence,否则 padding 会被当作真实数据参与计算,严重影响结果。
三、初始隐藏状态 h_0(可选输入)
形状规则(与 batch_first 无关!):
python
h_0: (num_directions * num_layers, N, hidden_size)num_directions = 2 if bidirectional else 1N = batch size
构造示例:
单向单层:
python
h_0 = torch.zeros(1, batch, hidden_size)双向双层:
python
h_0 = torch.zeros(4, batch, hidden_size) # 2 directions × 2 layers传入方式:
python
output, h_n = rnn(x, h_0=h_0)默认行为:
- 若不传
h_0,PyTorch 自动初始化为全 0 张量。
实用技巧:
-
在语言模型中跨 batch 传递状态:
pythonh = h.detach() # 断开历史计算图 output, h = rnn(x, h)
四、返回值详解:output 与 h_n
output
- 含义 :最后一层 在每个时间步的隐藏状态。
- 形状 :
batch_first=False→(L, N, output_size)batch_first=True→(N, L, output_size)- 其中
output_size = hidden_size(单向)或2 * hidden_size(双向)
✅ 用途:
- 序列标注(NER、POS)→ 对每个位置分类
- Encoder 输出 → 供 Attention 或 Decoder 使用
h_n
- 含义 :每一层 在最后一个时间步的隐藏状态(正向/反向分开存储)。
- 形状 :
(num_directions * num_layers, N, hidden_size)← 固定格式,不受batch_first影响
✅ 用途:
- 文本分类 → 用最后隐藏状态代表整句
- 状态传递 → 作为下一个 RNN 的初始状态
如何提取有用信息?
情况1:单向 RNN(bidirectional=False)
python
# 取最后一层的最终隐藏状态
final_hidden = h_n[-1] # (N, hidden_size)情况2:双向 RNN(bidirectional=True,单层)
python
# h_n: (2, N, hidden_size)
forward_h = h_n[0] # (N, hidden_size)
backward_h = h_n[1] # (N, hidden_size)
combined = torch.cat([forward_h, backward_h], dim=1) # (N, 2*hidden_size)情况3:多层双向 RNN(num_layers=2, bidirectional=True)
python
# h_n: (4, N, hidden_size)
# 顺序为:[layer0_forward, layer0_backward, layer1_forward, layer1_backward]
last_forward = h_n[-2] # layer1 forward
last_backward = h_n[-1] # layer1 backward
combined = torch.cat([last_forward, last_backward], dim=1)📌 排列顺序是:按层优先,每层内先 forward 后 backward 。
因此,最后一层的前向状态是
h_n[-2],后向是h_n[-1]。
五、完整代码示例(覆盖各种场景)
示例1:最简使用(单向、单层、batch_first=True)
python
import torch
import torch.nn as nn
rnn = nn.RNN(10, 20, batch_first=True)
x = torch.randn(4, 6, 10) # batch=4, seq=6, input=10
output, h_n = rnn(x)
print("output:", output.shape) # (4, 6, 20)
print("h_n:", h_n.shape) # (1, 4, 20)
# 用于分类:取最后一个时间步的隐藏状态
final_hidden = h_n.squeeze(0) # (4, 20)
logits = nn.Linear(20, 2)(final_hidden)示例2:双向 RNN 用于文本分类
python
rnn = nn.RNN(100, 64, bidirectional=True, batch_first=True)
x = torch.randn(8, 12, 100) # 8 sentences, max_len=12
output, h_n = rnn(x)
# h_n: (2, 8, 64)
forward_h, backward_h = h_n[0], h_n[1]
final_repr = torch.cat([forward_h, backward_h], dim=1) # (8, 128)
classifier = nn.Linear(128, 2)
logits = classifier(final_repr)示例3:多层 RNN + Dropout
python
rnn = nn.RNN(
input_size=50,
hidden_size=128,
num_layers=3,
dropout=0.3,
batch_first=True
)
x = torch.randn(5, 10, 50)
output, h_n = rnn(x)
print(h_n.shape) # (3, 5, 128)
# 取最后一层
final_hidden = h_n[-1]
print(final_hidden.shape) # (5, 128)示例4:手动传入初始隐藏状态
python
batch, seq, in_dim = 2, 4, 10
hidden_size = 16
num_layers = 2
bidirectional = True
rnn = nn.RNN(in_dim, hidden_size, num_layers, bidirectional=bidirectional, batch_first=True)
x = torch.randn(batch, seq, in_dim)
h0 = torch.randn(4, batch, hidden_size) # 2 directions × 2 layers
output, hn = rnn(x, h0)
print(hn.shape) # (4, 2, 16)示例5:与变长序列配合(使用 pack/pad)
python
from torch.nn.utils.rnn import pad_sequence, pack_padded_sequence, pad_packed_sequence
# 假设有两个句子,长度分别为 5 和 3
seqs = [torch.randn(5, 10), torch.randn(3, 10)]
lengths = torch.tensor([5, 3])
# padding
padded = pad_sequence(seqs, batch_first=True) # (2, 5, 10)
# 排序(pack 要求降序)
sorted_lengths, idx = lengths.sort(descending=True)
padded = padded[idx]
# pack
packed = pack_padded_sequence(padded, sorted_lengths, batch_first=True)
# RNN
rnn = nn.RNN(10, 20, batch_first=True)
packed_output, h_n = rnn(packed)
# 解包(如果需要 output)
output, out_lengths = pad_packed_sequence(packed_output, batch_first=True)这样可以避免 padding 部分参与计算,提升效率和精度。
六、常见错误与解决方案
| 错误信息 | 原因 | 修复方法 |
|---|---|---|
RuntimeError: Expected hidden size (1, 3, 20) but got (1, 2, 20) |
h_0 的 batch 维度与输入不一致 |
确保 h_0.shape[1] == input.shape[0 if batch_first else 1] |
output has shape (5, 3, 20) but expected (5, 3, 40) |
忘了 bidirectional=True 会让输出翻倍 |
检查是否设置了 bidirectional,并调整后续层输入维度 |
Expected tensor with dim 3, got 2 |
输入不是三维张量 | 确保输入是 (L,N,H) 或 (N,L,H) |
CUDA error: device-side assert triggered |
序列长度 ≤ 0 或索引越界 | 检查 lengths 是否全 > 0,且 ≤ max_seq_len |
All input tensors must be on the same device |
x 和 h_0 设备不一致 |
调用 .to(device) 统一设备 |
七、与 LSTM / GRU 的 API 差异(仅接口层面)
| 特性 | RNN |
LSTM |
GRU |
|---|---|---|---|
| 初始化参数 | 相同 | 相同 | 相同 |
| 输入形状 | 相同 | 相同 | 相同 |
h_0 形状 |
(num_dirs * L, N, H) |
(num_dirs * L, N, H) |
(num_dirs * L, N, H) |
| 返回值数量 | 2 (output, h_n) |
2 (output, (h_n, c_n)) |
2 (output, h_n) |
是否需要 c_0 |
否 | 是(可选) | 否 |
所以:除了 LSTM 多一个 cell state,其他用法几乎一致!
八、总结:使用 nn.RNN 的 checklist
✅ 确定 input_size 和 hidden_size
✅ 决定是否 batch_first=True(推荐 True)
✅ 根据任务选择 num_layers(1~3)和 bidirectional(分类常用双向)
✅ 构造输入为三维张量
✅ 理解 output 用于序列任务,h_n 用于分类/状态传递
✅ 双向时记得拼接 h_n[0] 和 h_n[1]
✅ 多层时 h_n[-1] 是最后一层(单向)或 h_n[-2]/h_n[-1](双向)
✅ 变长序列必须用 pack_padded_sequence
✅ 如果使用 GPU,确保所有张量(包括 h_0)都在同一设备上
28、PyTorch里输入到底有几个------1个 or 2个
聚焦于:
PyTorch 中
nn.RNN的前向调用(forward call)需要传入几个张量作为输入?这和"每个时间步有两个输入"有什么关系?
答案是:PyTorch 的接口设计是对理论 RNN 的批量(batched)、序列化(sequential)封装,输入张量个数 ≠ 单步计算的输入变量个数,但二者在逻辑上完全一致。
下面我们一步步拆解。
一、PyTorch 中 nn.RNN 的标准调用方式
python
import torch
import torch.nn as nn
rnn = nn.RNN(input_size=10, hidden_size=20, batch_first=True)
# 输入序列: batch_size=32, 序列长度=15, 每个token维度=10
x = torch.randn(32, 15, 10) # shape: (B, T, D_in)
# 初始隐藏状态(可选)
h0 = torch.zeros(1, 32, 20) # shape: (num_directions * num_layers, N, hidden_size)
# 前向传播
output, hn = rnn(x, h0)关键点:
rnn(x, h0)接收 两个张量参数 :x:整个输入序列h0:初始隐藏状态(可选;若不传,默认为全零)
✅ 所以,从 PyTorch 函数调用角度看,
nn.RNN的输入是 2 个张量。
二、这两个输入张量对应什么?
| PyTorch 输入 | 对应理论概念 | 说明 |
|---|---|---|
x (shape: (B, T, D_in)) |
{ x 1 , x 2 , . . . , x T } \{\mathbf{x}_1, \mathbf{x}_2, ..., \mathbf{x}_T\} {x1,x2,...,xT} | 包含了所有时间步的外部输入,一次性传入 |
h0 (shape: (num_directions * num_layers, B, D_hid)) |
h 0 \mathbf{h}_0 h0 | 初始隐藏状态(单层时 L=1) |
注意:
x不是单个 x t \mathbf{x}_t xt,而是整个序列打包成一个张量h0就是理论中的 h 0 \mathbf{h}_0 h0,只在 t=1 时使用
三、PyTorch 内部做了什么?(自动展开时间步)
虽然你只传了两个张量,但 nn.RNN 内部会自动按时间步循环,对每个 t 执行:
python
# 伪代码(简化版,忽略 batch 和 layer 维度)
h_prev = h0[0] # 初始状态
for t in range(T):
x_t = x[:, t, :] # 取出第 t 步输入
h_t = tanh(W_xh @ x_t + W_hh @ h_prev + b_h)
output[:, t, :] = h_t
h_prev = h_t在这个循环中,每一步的计算仍然严格依赖两个东西:
- 当前 token
x_t - 上一状态
h_prev
✅ 这和我们之前说的"每个时间步有两个输入 "完全一致!
四、对比总结:理论 vs PyTorch
| 视角 | "输入"的含义 | 输入个数 | 说明 |
|---|---|---|---|
| 理论(单步、单样本) | 计算 h t h_t ht 所需的变量 | 2 个 : x t x_t xt, h t − 1 h_{t-1} ht−1 | 微观计算单元 |
| PyTorch(整体、批量) | 用户调用 RNN 层时传入的张量 | 2 个张量 : input_seq, initial_hidden |
宏观接口封装 |
🔔 关键理解 :
PyTorch 把"所有 x t x_t xt"打包成一个张量
x,把"初始 h 0 h_0 h0"作为一个张量h0,从而用两个张量完成了对"T 个时间步 × 每步两个输入"的高效表达。
五、如果我不传 h0 呢?
python
output, hn = rnn(x) # 不传 h0- PyTorch 会自动创建一个全零张量 作为
h0 - 这对应理论中的 h 0 = 0 \mathbf{h}_0 = \mathbf{0} h0=0
- 所以输入张量个数变为 1 个(只有
x),但内部逻辑不变
💡 这类似于函数有默认参数:
def rnn(x, h0=None)。
六、常见误区澄清
❌ 误区1:"PyTorch RNN 每步接收三个输入"
→ 错。用户只传两个张量,内部每步计算仍只用两个变量。
❌ 误区2:"x 是一个输入,h0 是第二个,所以总共两个输入,和理论一致"
→ 基本正确,但要明确:
x代表 T 个 x t x_t xth0代表 1 个 h 0 h_0 h0- 总共参与计算的"输入变量实例"其实是 T + 1 个 (T 个 x t x_t xt + 1 个 h 0 h_0 h0),
- 但接口张量数量是 2 个。
✅ 正确认知:
PyTorch 的两个输入张量,是对经典 RNN 理论中"序列输入 + 初始状态"的工程实现,二者在数学和计算逻辑上完全等价。
七、终极回答
经典 RNN 在 PyTorch 代码中的输入张量个数是:1 个或 2 个
- 如果提供初始隐藏状态:2 个张量 (
input_seq,h0)- 如果不提供:1 个张量 (
input_seq,h0自动设为零)
这与理论中"每个时间步有两个输入( x t x_t xt 和 h t − 1 h_{t-1} ht−1)"并不矛盾 ,因为 PyTorch 的接口是对整个序列和初始条件的批量封装 ,
而内部循环依然严格遵循经典 RNN 的每步双输入机制。
29、代码:
python
import torch
import torch.nn as nn
torch.manual_seed(66)
x = torch.randn(2, 3, 5) # 2个句子, 每个句子3个词, 每个词是5维词向量
rnn = nn.RNN(input_size=5, hidden_size=4, num_layers=2, batch_first=True)
output, hidden = rnn(x)
print(output.shape) # (2, 3, 4)
print(hidden.shape) # (2, 2, 4)