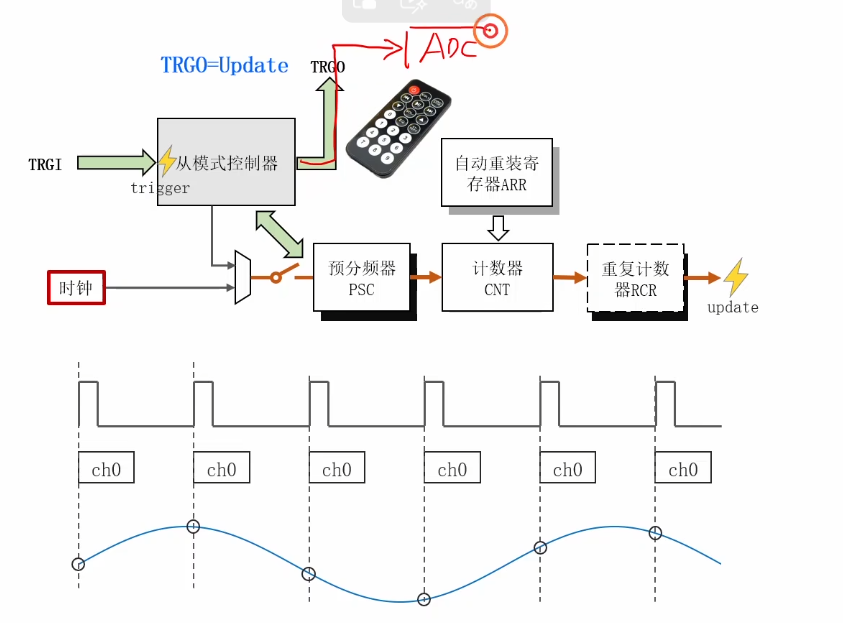
定时器触发:通过定时器产生外部触发信号的方式叫做定时器触发
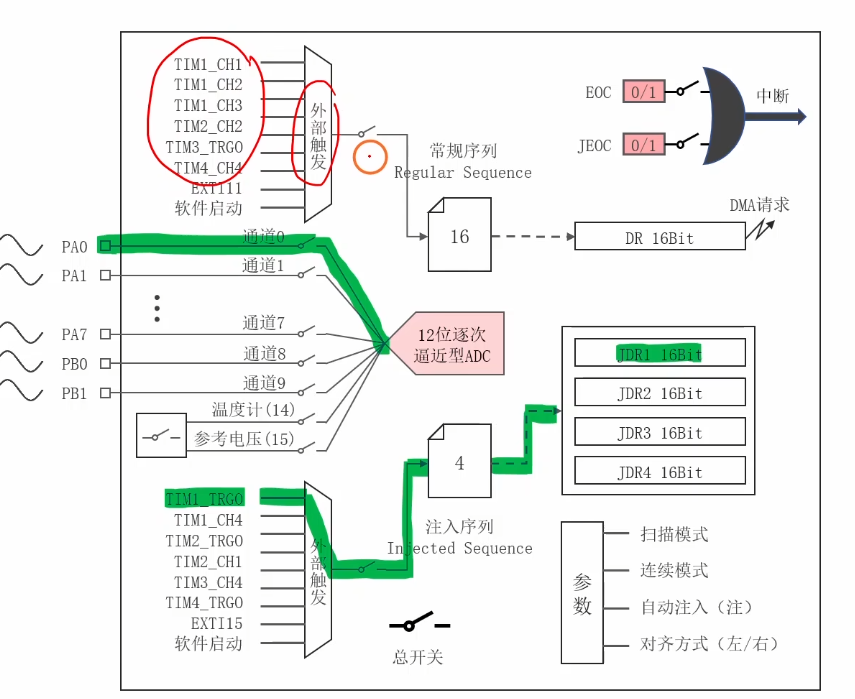
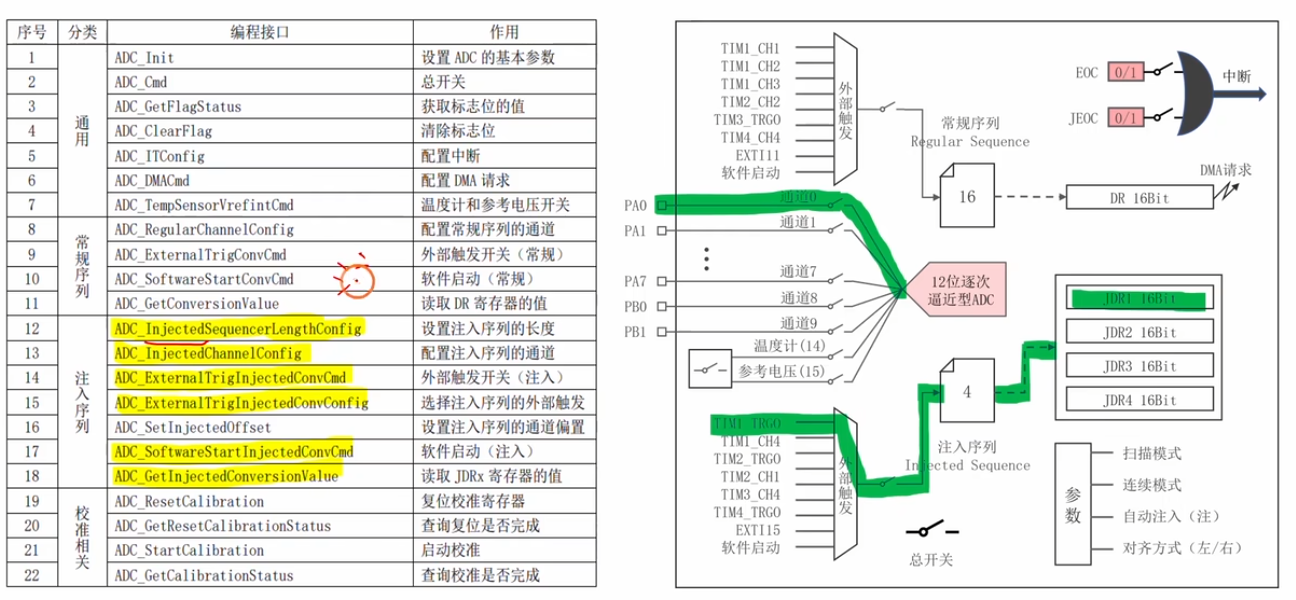
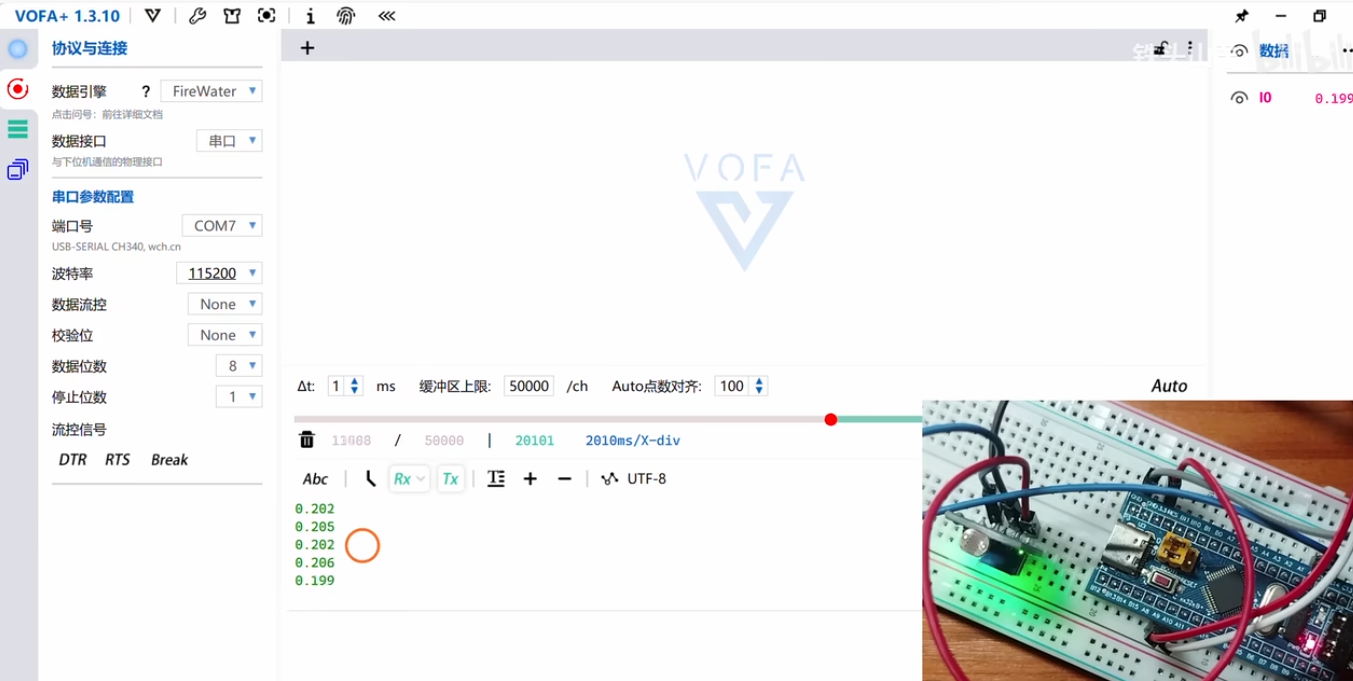
试验:光敏传感器的模拟输出接到PA0引脚上,PA0对应的是单片机ADC的通道0,把通道0写入到注入序列第一行,外部触发信号选择TIM1_TRGO,通过定时器1的TRGO产生脉冲启动注入序列,注入序列第一行被执行完,通道0的转换结果被保存到JDR1寄存器,把JDR1寄存器里存储的结果读出来。
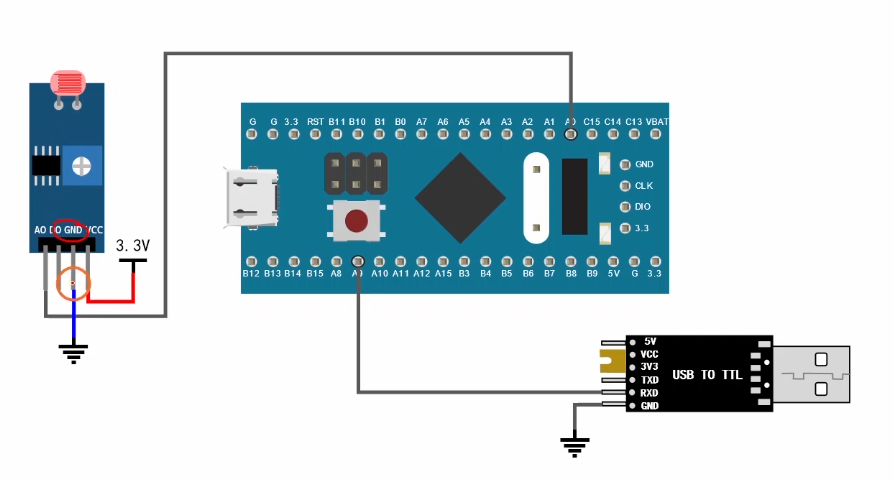
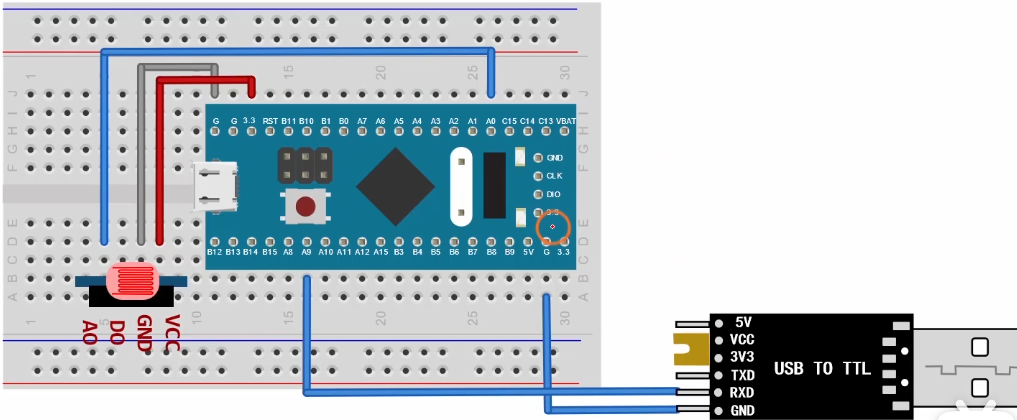
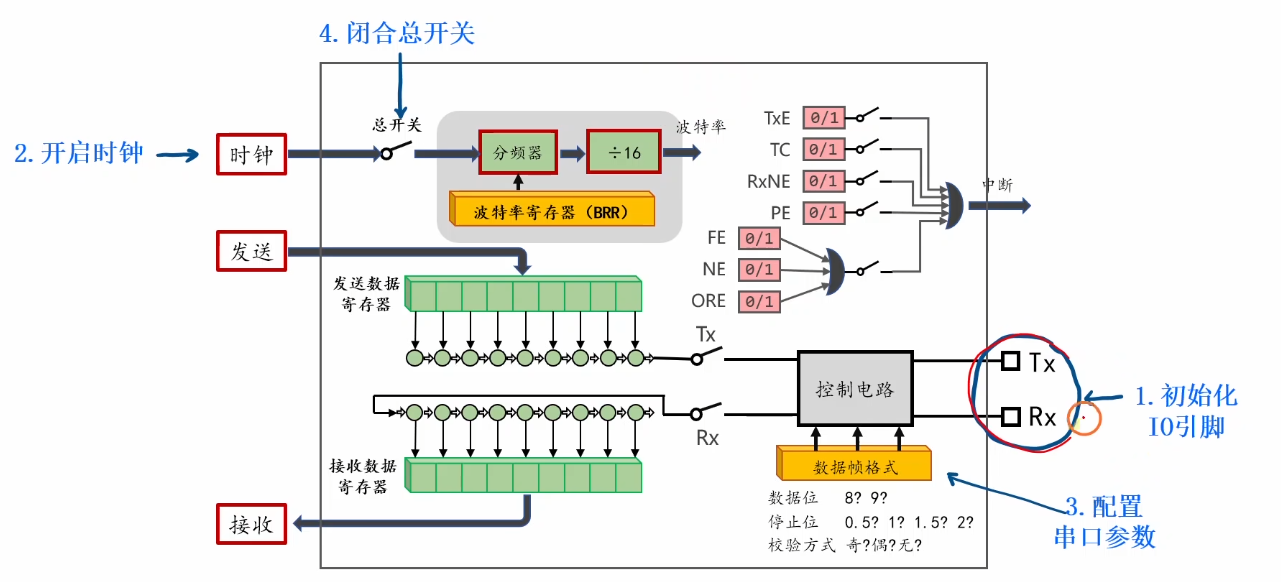
1.连接电路
2.初始化串口
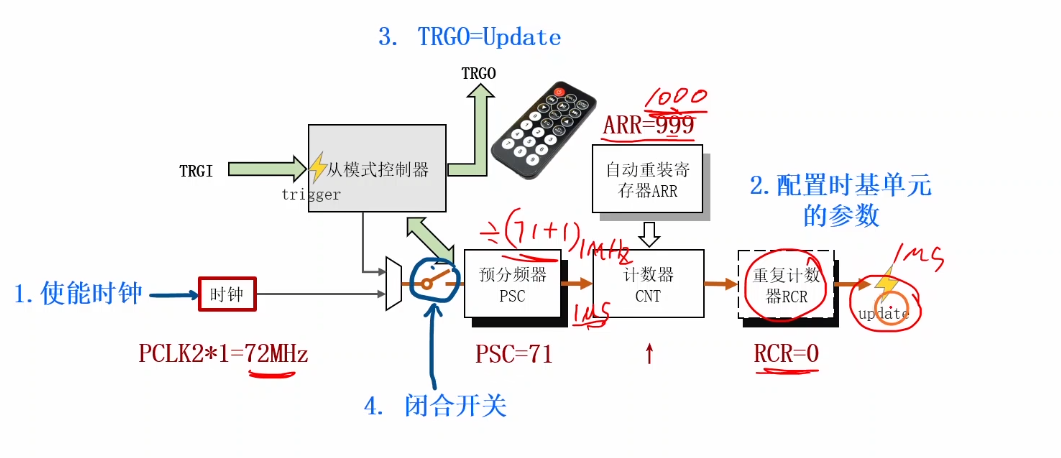
3.配置定时器1的TRGO
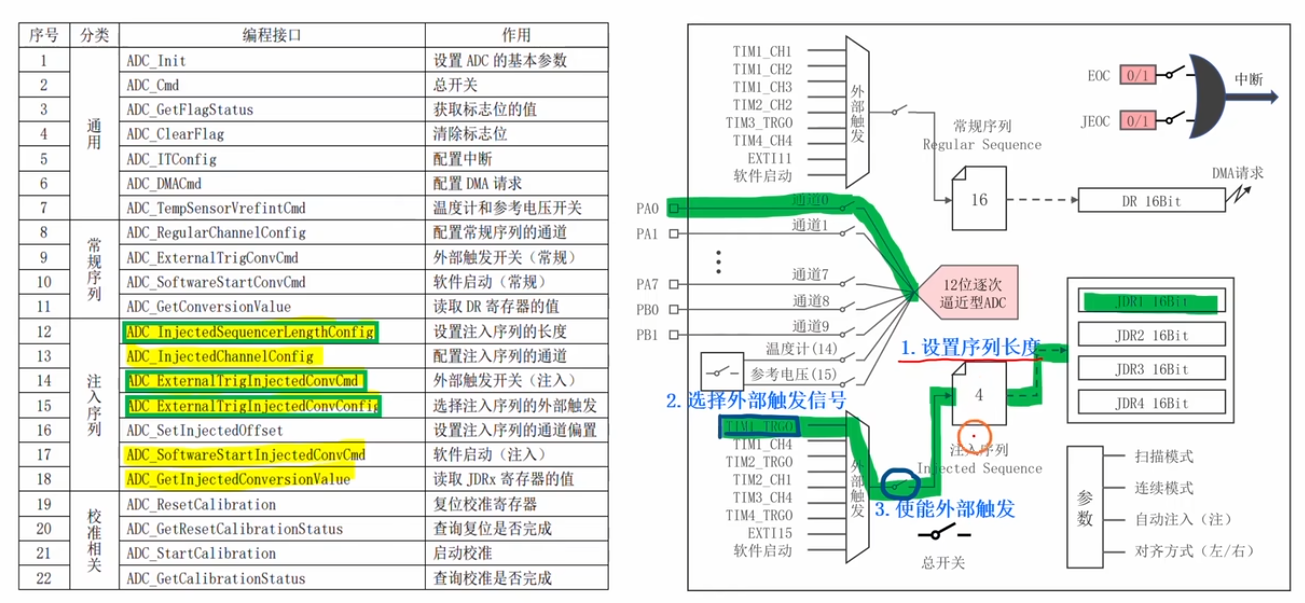
4.注入序列的编程接口
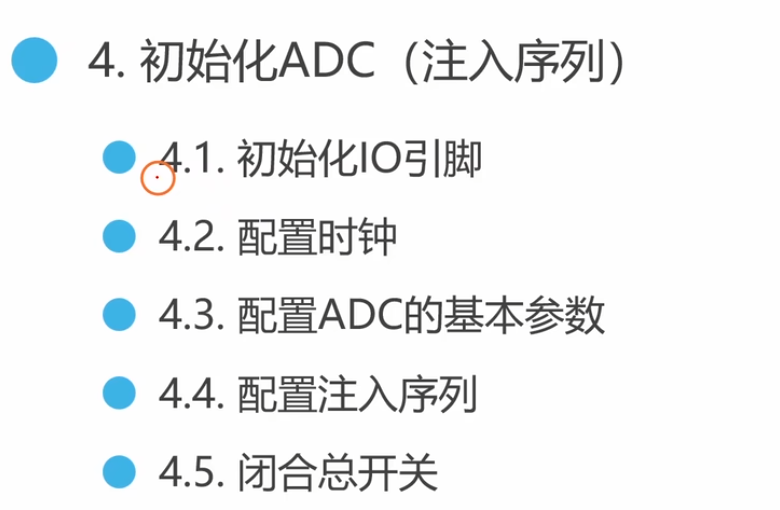
5.初始化ADC(注入序列)
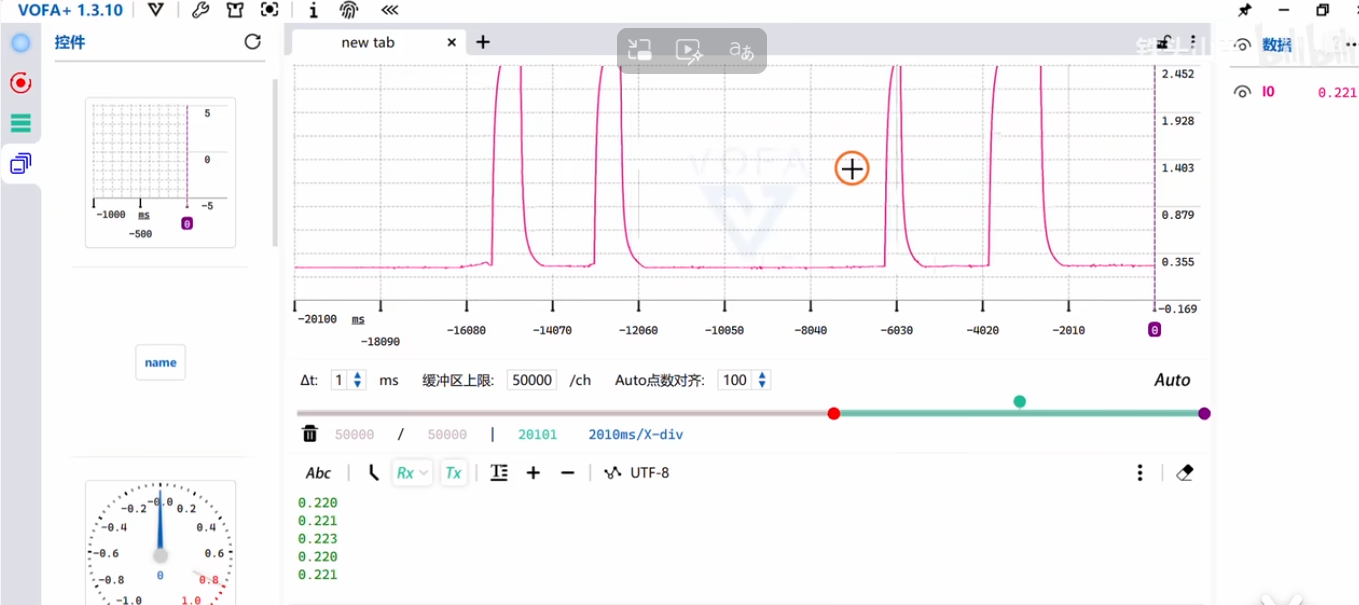
6.读取并发送测量结果

cs
while(1)
{
//1.等待注入序列转换完成
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_JEOC)== RESET);
//2.读取转换的结果
uint16_t jdrl = ADC_GetInjectedConversionValue (ADC1, ADC_InjectedChannel_1);
//3.清除JEoc标志位
ADC_ClearFlag (ADC1, ADC_FLAG_JEOC) ;
//4.把结果转换成电压
float voltage = jdrl * (3.3f / 4095);
//#5.通过串口把结果发送出发去
My_USART_Printf (USART1, "%.3f\n", voltage);
}总代码:
cs
#include "stm32f10x.h"
#include "usart.h"
void App_USART1_Init(void);
void App_TIM1_Init(void);
void App_ADC_Init(void);
int main(void)
{
App_USART1_Init();
App_TIM1_Init();
App_ADC_Init();
// My_USART_SendString(USART1, "Hello world. \r\n");
while(1)
{
//1.等待注入序列转换完成
while(ADC_GetFlagStatus(ADC1, ADC_FLAG_JEOC)== RESET);
//2.读取转换的结果
uint16_t jdrl = ADC_GetInjectedConversionValue (ADC1, ADC_InjectedChannel_1);
//3.清除JEoc标志位
ADC_ClearFlag (ADC1, ADC_FLAG_JEOC) ;
//4.把结果转换成电压
float voltage = jdrl * (3.3f / 4095);
//#5.通过串口把结果发送出发去
My_USART_Printf (USART1, "%.3f\n", voltage);
}
}
void App_USART1_Init(void)
{
//#1.初始化I0引脚,A9
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//#2.开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//#3.配置串口的参数
USART_InitTypeDef USART_InitStruct = {0};
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStruct);
//#4.闭合串口的总开关
USART_Cmd(USART1, ENABLE);
}
void App_TIM1_Init(void)
{
//#1.使能TIM1的时钟
RCC_APB2PeriphClockCmd (RCC_APB2Periph_TIM1,ENABLE);
//#2.配置TIM1的时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct = {0};
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period = 999;
TIM_TimeBaseInitStruct.TIM_Prescaler = 71;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit (TIM1, &TIM_TimeBaseInitStruct);
// #3. TRGO:Update
TIM_SelectOutputTrigger (TIM1,TIM_TRGOSource_Update);
//#4.开启定时器1的总开关
TIM_Cmd(TIM1, ENABLE);
}
void App_ADC_Init(void)
{
//#1.初始化I0引脚
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE) ;
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init (GPIOA, &GPIO_InitStruct) ;
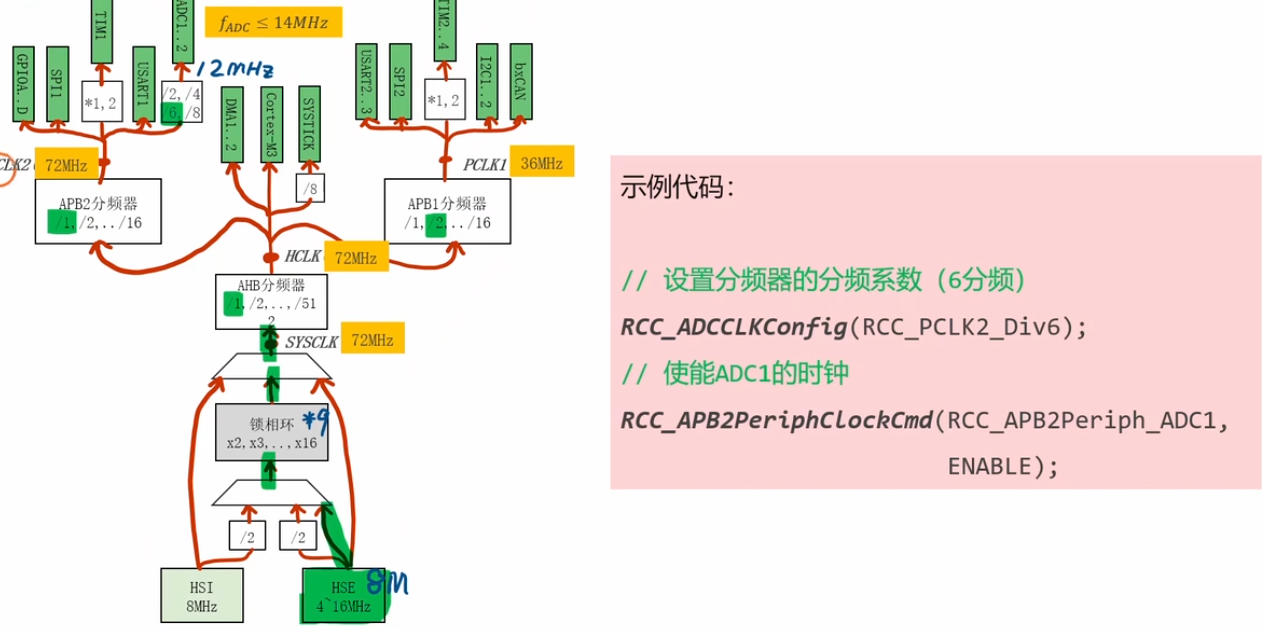
//#2.配置ADC模块的时钟
RCC_ADCCLKConfig (RCC_PCLK2_Div6);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
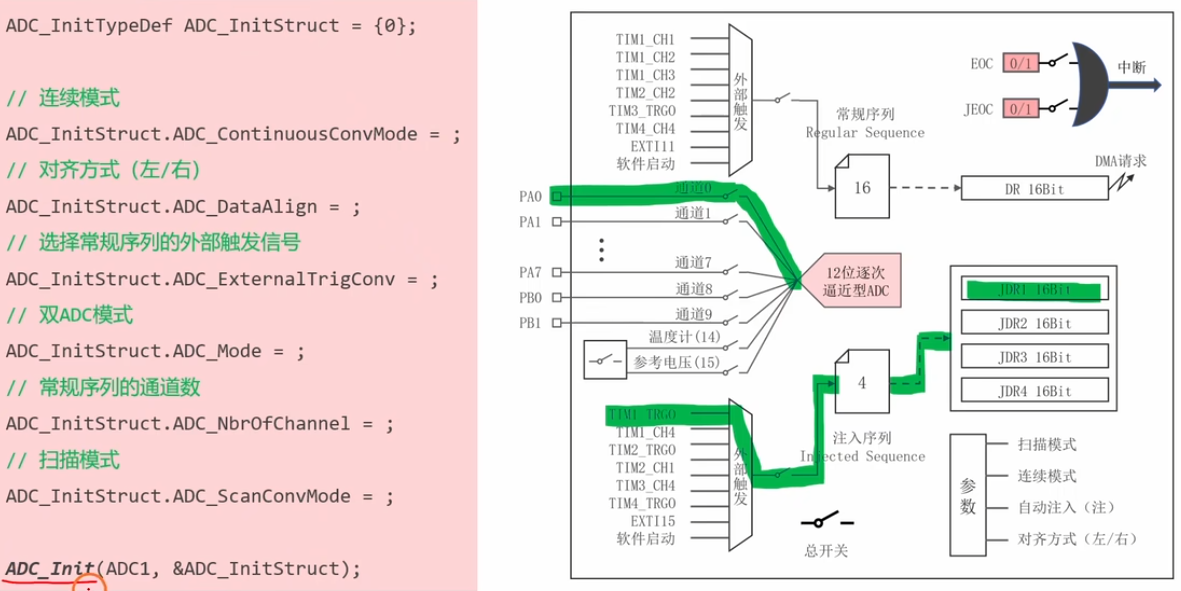
//#3.配置ADC的基本参数
ADC_InitTypeDef ADC_InitStruct = {0};
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE;
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;
ADC_InitStruct.ADC_NbrOfChannel = 1;
ADC_InitStruct.ADC_ScanConvMode = DISABLE;
ADC_Init (ADC1,&ADC_InitStruct);
//#4.配置注入序列的额外参数
ADC_InjectedSequencerLengthConfig(ADC1,1);
ADC_ExternalTrigInjectedConvConfig(ADC1, ADC_ExternalTrigInjecConv_T1_TRGO);
ADC_ExternalTrigInjectedConvCmd(ADC1,ENABLE);
ADC_InjectedChannelConfig(ADC1,ADC_Channel_0, 1, ADC_SampleTime_13Cycles5);
//#5.闭合总开关
ADC_Cmd(ADC1,ENABLE);
}