一、光电传 感器系统功能概 述
光电转速传感器是对电机转速的实时、精准测量是无人机动力测试平台的核心能力,灵翼飞航公司的测试平台采用光电转速传感器以非接触式光信号传输,实现对电机****/螺旋桨转速的****高效捕捉。
光电转速传感器通过光纤传输光电信号,利用聚焦透镜将光束汇聚至旋转叶片表面的反光贴纸将贴纸反射的光脉冲信号转化为电脉冲信号反馈给采集卡,该系统具有响应速度快、抗电磁干扰强、安装灵活等特点。

图1 光电传感器放大器(图片来自基恩士官网)
二、光电传感器工作原理
本系统由光电放大器(传感器本体) **、**光纤线缆 **、**光学聚焦镜 三部分构成闭环光路。其信号流转过程如下:
**1.**发射 :传感器本体内的LED/激光二极管发出调制光信号。
2.传输 :光信号经由光纤 传输至前端。
3.聚焦 :光束通过末端的光学聚焦镜**** 汇聚成细小的光斑,投射到被测桨叶表面上的反光贴纸上。
**4.**反射 :
o当光斑照射到反光贴纸 时,强光被反射回光纤;
o当光斑照射到非反光贴纸 区域时,光线被散射或吸收,反射极弱。
5.接收与处理 :反射光经光纤传回传感器本体,光电元件将光强变化转换为电脉冲信号后发送给采集卡,由上位机软件或数据处理单元根据脉冲频率最终计算出转速值(RPM) 。
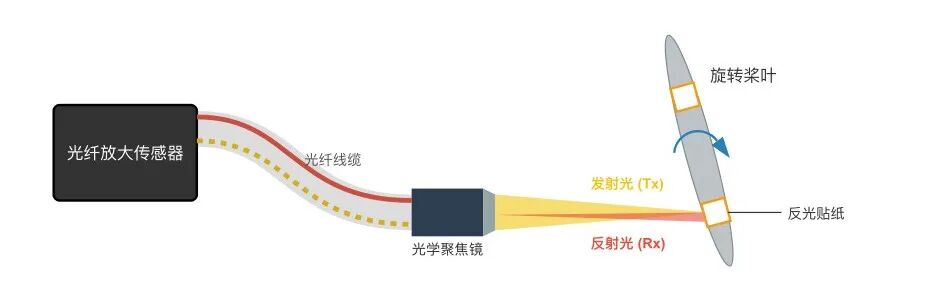
图2 光电传感器工作原理图
三、光电传感器系统组成与规格
|-----------------------|---------------------------------------------------------------------------------|-----------------------------------|--------------------------------|
| 组件名称 | 实物图 | 功能描述 | 关键参数 |
| 光电放大器 |  | 信号处理与输出核心 | 输入电源:DC12-24V 响应时间:25µs 输出:NPN |
| 信号处理与输出核心 | 输入电源:DC12-24V 响应时间:25µs 输出:NPN |
| 光纤 线缆 | 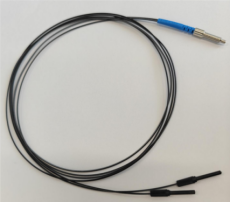 | 传输光信号,用于小型测试平台(LY-MICRO-LY-30KGF) | 芯径:0.5mm 外径:1.0mm 最小弯曲半径:R15 |
| 传输光信号,用于小型测试平台(LY-MICRO-LY-30KGF) | 芯径:0.5mm 外径:1.0mm 最小弯曲半径:R15 |
| 光纤 线缆 |  | 传输光信号,用于中大型测试平台(LY-70KGF-LY-MAX) | 芯径:1.0mm 外径:2.2mm 最小弯曲半径:R25 |
| 传输光信号,用于中大型测试平台(LY-70KGF-LY-MAX) | 芯径:1.0mm 外径:2.2mm 最小弯曲半径:R25 |
| 光学聚焦镜 | 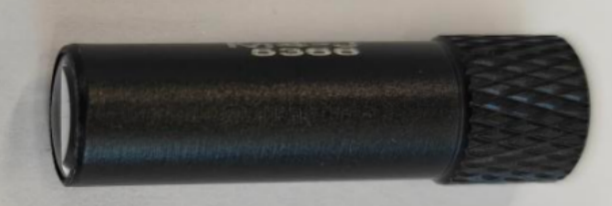 | 汇聚光束,用于小型测试平台(LY-MICRO-LY-30KGF) | 镜口外径: ɸ7.3mm 适用距离:15-40mm |
| 汇聚光束,用于小型测试平台(LY-MICRO-LY-30KGF) | 镜口外径: ɸ7.3mm 适用距离:15-40mm |
| 光学聚焦镜 |  | 汇聚光束,用于中大型测试平台(LY-70KGF-LY-MAX) | 镜口外径:ɸ10.9mm 适用距离: 70mm |
| 汇聚光束,用于中大型测试平台(LY-70KGF-LY-MAX) | 镜口外径:ɸ10.9mm 适用距离: 70mm |
表1 光电传感器系统组成与规格表
四、光电传感器在动力测试台上安装及使用
(一)聚焦镜 及其使用方法
1.聚焦镜的作用
o汇聚光束: 光纤出口的光束是发散的(如下图),使用聚焦镜可以将发出的光束会聚成一束直径很小、能量集中的**"光斑",让它准确地落在桨叶的反光贴纸上,提高信噪比**。同时把从反射回来的微弱光线再次会聚到接收端的光纤内,使有效光强远大于背景杂散光;
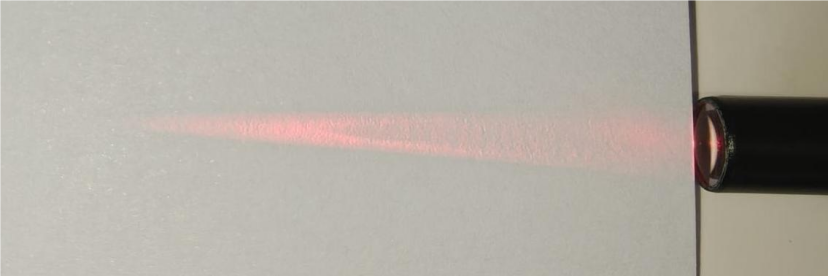
图3 光纤出口的光束
o 精准检测: 通过形成"景深"很小的聚焦区,把检测范围限定在轴向很窄的一段距离内,从而屏蔽掉灰尘、油雾或背景物体的干扰,降低误计数,提高转速测量的重复性精度。
2.聚焦 镜 的聚焦距离
利用聚焦镜汇聚光线的原理,可以找到最佳的光斑投射距离,建议在该投射距离内使用,其最佳投射距离可经由下列方式进行调整:
o选用不同焦距的镜头,来改变聚焦距离;
o改变光纤头旋入聚焦镜的深度,即改变光源与凸透镜的距离。(动力测试台出厂已标定,已是最佳距离位置,不建议用户自行调整,下述说明仅做原理探讨)
- 15mm的ɸ7.3mm聚焦镜
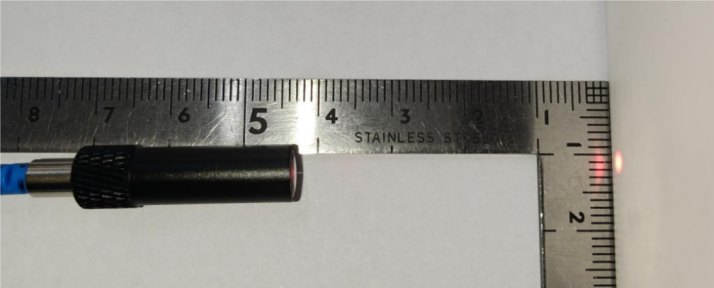
图4 光纤头完全旋入聚焦镜
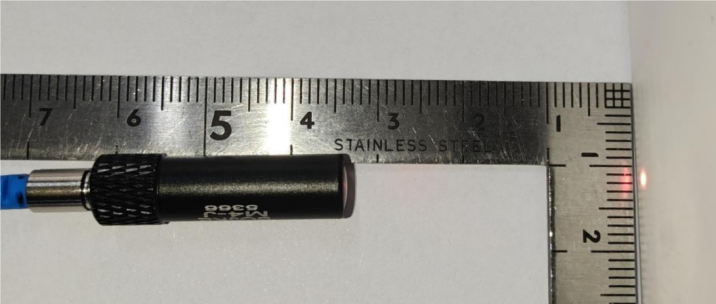
图5 光纤头旋出2mm

图6 光纤头旋出4mm
上述照片中配置了适用距离15mm的ɸ7.3mm聚焦镜,三张照片中蓝色光纤接口旋入聚焦镜的深度各有不同,自上而下为:完全旋入,旋出2mm,旋出4mm。可见光纤头旋入聚焦镜越深(即光源点距离凸透镜越近),形成最佳光斑的距离越远。
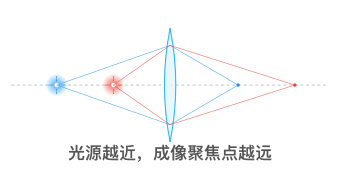
图7 光源距离和聚焦点关系图
- 70mm的ɸ10.9mm聚焦镜

图8 光纤头完全旋入

图9 光纤头旋出1mm
上述照片中配置了适用距离70mm的ɸ10.9mm聚焦镜,图8光纤完全旋入底座,图9光纤旋出约1mm,相较于完全旋入时的状态,光斑有2mm左右的收敛,可见由于凸透镜焦距的增加,改变光源位置对光斑大小影响有限。
同时,改变光源位置会同时改变光源的出射角度与入射光的入射角度,造成有效出射/入射光的减少,降低了传感器的灵敏度,这种减少可以用光强上限检测距离直观地进行测量。
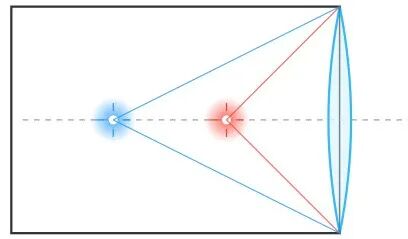
图10 光源位置会改变出射角度与入射光的入射角度
*"光强上限检测距离" 指传感器接收到的反射光强度恰好达到传感器的量程上限,超出该距离后传感器测量到的光强数值将迅速下降,在该上限检测距离以内使用光电转速传感器将会获得最佳的灵敏度。
对于适用距离70mm的ɸ10.9mm聚焦镜有如下测量结果:
|----------|------|-------|------|-------|
| 光纤旋入底座距离 | 0mm | 0.5mm | 1mm | 1.5mm |
| 光强上限检测距离 | 75mm | 68mm | 60mm | 55mm |
表2 光纤旋入底座距离与光强上限检测距离关系
综上所述:不建议用户自行调整光纤头旋入聚焦镜的深度, 我们在发货前都会将光纤安装至聚焦镜最深处,以获得最大的测量距离与最大的反射光增益。
(二)聚焦镜的安装
1.小型测试平台安装规范( LY-MICRO-LY-30KGF)
- 距离控制:聚焦镜前端距被测表面15-40mm(基于ɸ7.3mm 聚焦镜)
- 角度控制:光束与被测件旋转平面垂直(偏差**≤15°**)
- 调整方法:
对于小型测试平台,电机与螺旋桨结构紧凑,因此设计中将光纤转速测量与电机温度测量的探头使用连接块合二为一固定在序号4的调节杆上,箭头2为转速传感器聚焦镜投射方向,箭头3为电机温度传感器镜头方向,区域1为调节杆固定位置,传感器的调整主要在此区域进行。
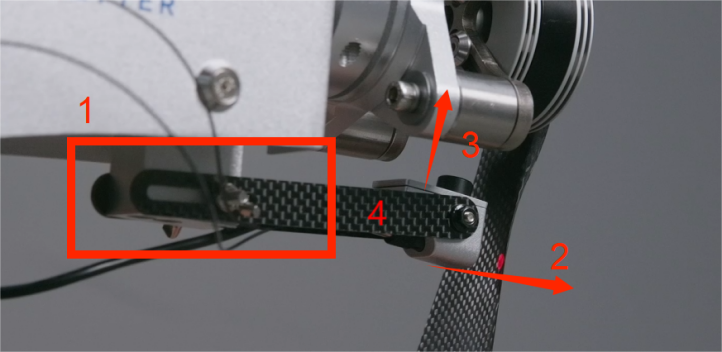
图11 光电传感器测试示意图(以LY-30KGF测试台为例)
调节杆被两侧的蝶形螺母锁紧在测试平台上,松开蝶形螺母后即可调整调节杆伸出角度或沿调节杆上腰型孔方向调整其伸出长度。(调整聚焦镜位置时需兼顾将电机温度传感器对准电机外壳中部区域,距离**≤50mm**)
**2.**中大型测试平台安装规范(LY-70KGF-LY-MAX)
- 距离控制:聚焦镜前端距被测表面30-70mm(基于ɸ10.9mm 聚焦镜)
- 角度控制:光束与旋转平面垂直(偏差**≤5°**)
- 调整方法:手动调节金属定型软管即可,调整中需保证软管弯曲半径≥80mm。

图12 光电传感器位置调整示意图(以LY-70KGF测试台为例)
(三)放光贴纸粘贴规范
反光贴纸表面为微棱镜结构,能把光线原向返回,不得使用普通贴纸替代,随机带有1卷反光贴纸,用户可按需自行购买,对于中大型平台(基于ɸ10.9mm 聚焦镜)光斑较大,建议贴纸宽度≥20mm。
**1.**表面清洁 :粘贴前须使用纯水或工业酒精清除剂清洁桨叶表面,确保无油污、灰尘、水渍,保证粘贴牢固;
**2.**粘贴尺寸 :固定好聚焦镜位置后,拨动桨叶,记录桨叶上光斑扫过的轨迹,沿轨迹行走方向贴满反光贴纸;
如图13所示,两根红线内部区域为桨叶转动时光斑扫过的轨迹,需保证该区域的长度方向被贴纸完全覆盖,贴纸的宽度 应完全覆盖光斑轨迹,并在其两侧各留有1-1.5mm的裕量 (即总宽度比光斑轨迹宽2~3mm)。
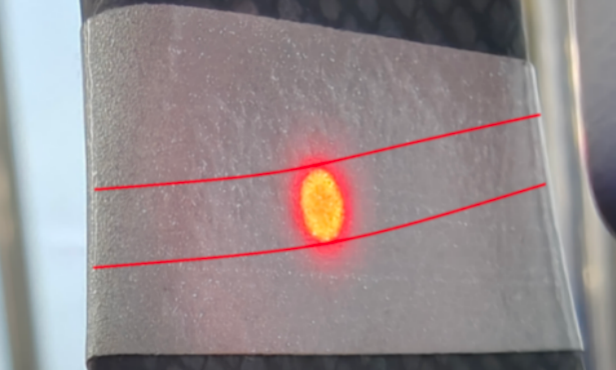
图13 反光贴纸张贴张贴覆盖光纤路径
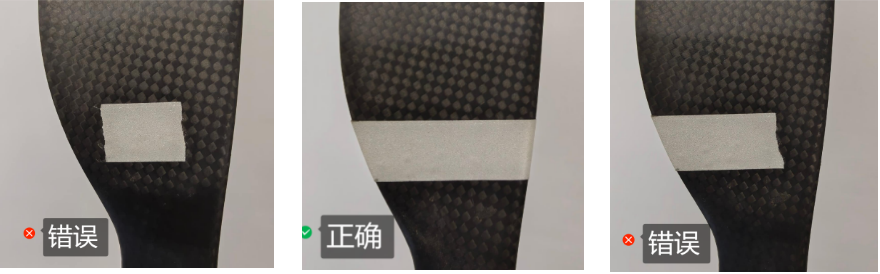
图14 反光贴纸张贴规范
3.数量配置 :为保证测量数据的精准有效,任何材质、尺寸的桨叶运行中只要可能被光斑扫过,均需按上述要求粘贴反光贴纸。
如图15所示,红线为桨叶旋转时光斑扫过的区域,该区域内桨叶都应粘贴反光贴纸。

图15 反光贴纸张贴覆盖光纤路径
原因分析: 光电转速传感器依赖反射光强度来判断是否有待检测表面扫过,当其扫过区域(如图14红线区域)仅有反光贴纸与空气(环境底噪)时,可以认为其接收到光线强度变化是干净的方波,传感器此时拥有最佳的分辨率。
而当贴纸的粘贴出现缺失或破损时,光斑将额外扫过桨叶本体,部分表面为抛光或亮面材质的桨叶,在特定角度的反射率非常高,这将会给原本干净的方波信号上添加噪声,高速计数时有可能引起光纤转速传感器误判。
(四)光电转速 传感器接线
1.对小型平台(LY-MICRO-30KGF):
如图15所示,光电转速传感器发货前已接线测试;传感器出线颜色定义: 棕色(DC24V+)、蓝色(GND)、黑色(光电SIG),接入芯片对应引脚。
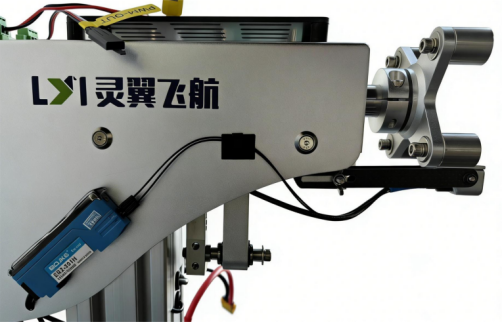
图15 小测试台上光电转速传感器安装位置
2.对中大型平台(LY-70KGF-MAX) :
如图16所示,光纤转速传感器发货前已接线测试;
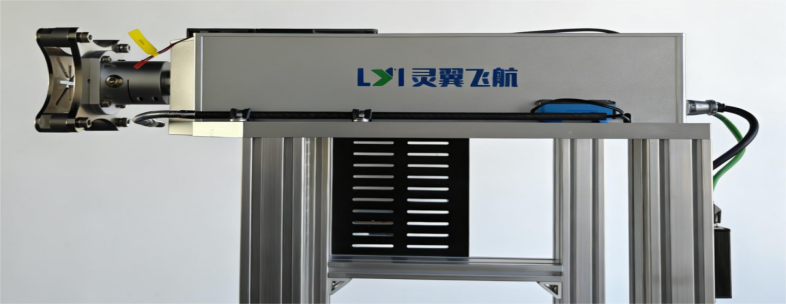
图16 大测试台上光电转速传感器安装位置
传感器出线颜色定义: 棕色(24V DC+)、蓝色(GND)、黑色(光电SIG),线路接入插头后插在采集卡A11接口,该接口位于测试平台内部。
|-----|-------|-----------|---------------------------------------------------------------------------------|
| A11 ||||
| Pin | 引脚定义 | 备注 | 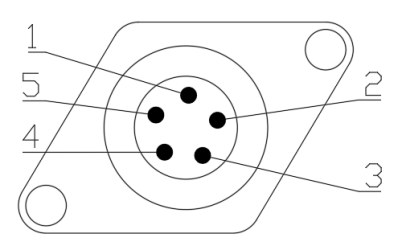 |
|
| 1 | 光电SIG | 光电转速信号接口 | |
| 2 | 24V+ | 光电转速信号接口 | |
| 3 | 24V- | 光电转速信号接口 | |
| 4 | 换相SIG | 换相/脉冲转速接口 | |
| 5 | 5V | 换相/脉冲转速接口 | |
| 使用说明: 1、转速传感器接口,可接入1路光电转速信号和1路脉冲转速信号; 2、对于发动机平台,脉冲转速需要用户接入待测发动机脉冲信号; 3、端口4、5可直接接入干净的方波信号,电平3.3V~5V。 ||||
表3 A11接口定义
(五) 光纤布线
1.光电转速传感器的光纤接入
按图17所示顺序:1.揭开防尘盖;2.按箭头方向向下移动光纤锁杆;3.插入光纤(深约14mm);4.上拉光纤锁杆;5.关闭防尘盖。
装配光纤线时需严格遵守弯曲半径要求(外径1mm/2.2mm分别对应弯曲半径15mm/25mm)。
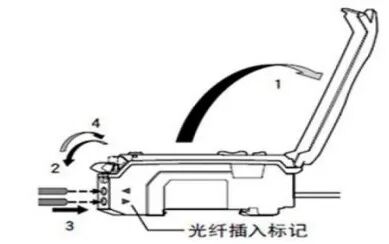
图17 光电传感器光纤接入步骤示意图
(六)使用环境要求
1.避 免 环境光 干扰 :避免在老式日光灯下使用;
2.避免多镜互射: 对于共轴测试平台,两个光电聚焦镜相对布置,在使用中应将其在高低位置或偏转角度上错开10mm左右,避免互射干扰。
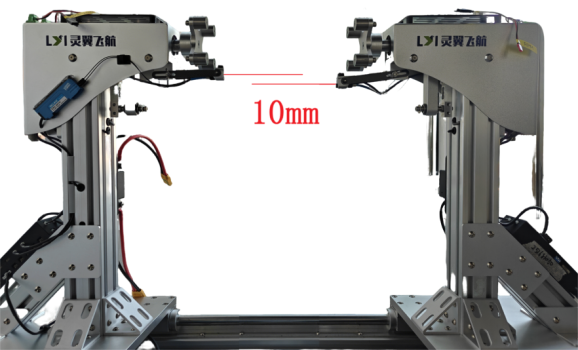
图18 共轴测试台光电传感器安装位置