一、二次型的核心概念
1.1 什么是二次型?
二次型是关于多个变量的二次齐次多项式,没有一次项和常数项。
基本形式:
特点 :每一项都是二次的(变量的总次数为2)。
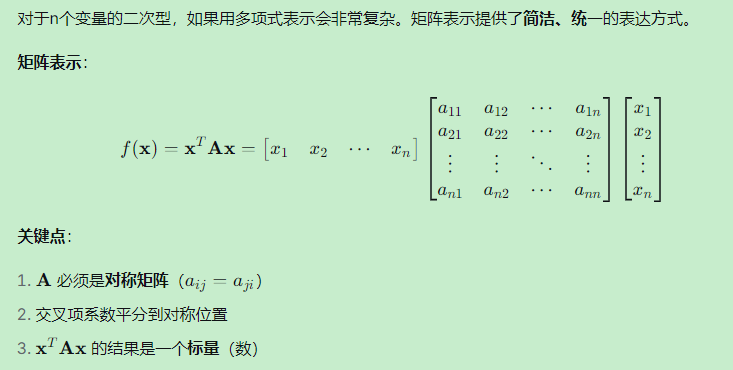
1.2 为什么需要矩阵表示?
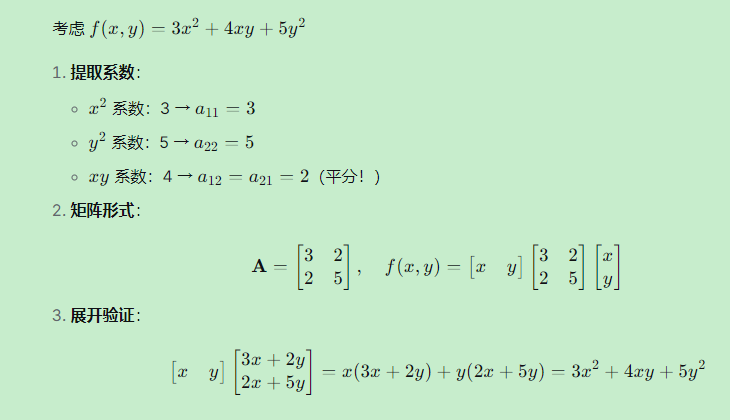
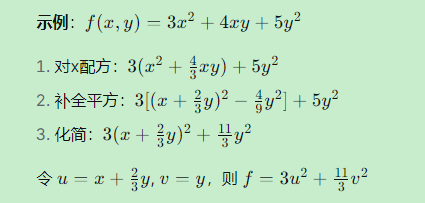
1.3 简单示例
二、二次型的几何意义
二次型是线性代数中一个核心概念,但其本质是几何的 。简单来说,二次型的几何意义就是描述了一个n维空间中的"二次曲面"(或曲线)的形状和取向。
我们可以从低维到高维,层层深入地理解:
1. 核心思想:从函数到图形
一个二次型本质上是一个二次齐次多项式。例如,在二维和三维空间中:
-
二维 (x, y) :
Q(x, y) = ax² + 2bxy + cy²。令Q(x, y) = 常数,就得到一条平面二次曲线(椭圆、双曲线或抛物线)。 -
三维 (x, y, z) :
Q(x, y, z) = ax² + by² + cz² + 2dxy + 2exz + 2fyz。令Q(x, y, z) = 常数,就得到一个空间二次曲面(椭球面、单/双叶双曲面、抛物面等)。
这个"常数"(通常是1)就像一个等高线 或等值面。研究二次型,就是研究这些等高线/等值面的几何形状。
2. 矩阵表示:抓住形状的关键
任何二次型都可以写成矩阵形式:
Q(𝐱) = 𝐱ᵀA𝐱
其中 𝐱 是列向量,A 是一个实对称矩阵。
这个对称矩阵 A 是理解几何意义的关键,因为它包含了图形的所有内在信息:
-
矩阵A的特征值 → 决定了图形沿主轴方向的伸缩程度(是拉长、压扁还是反向)。
-
矩阵A的特征向量 → 决定了图形的主轴方向。
-
矩阵A的正定性 → 决定了图形的整体类型。
3. 几何意义的详细分解
a) 主轴定理(谱定理)------ 找到"正视角度"
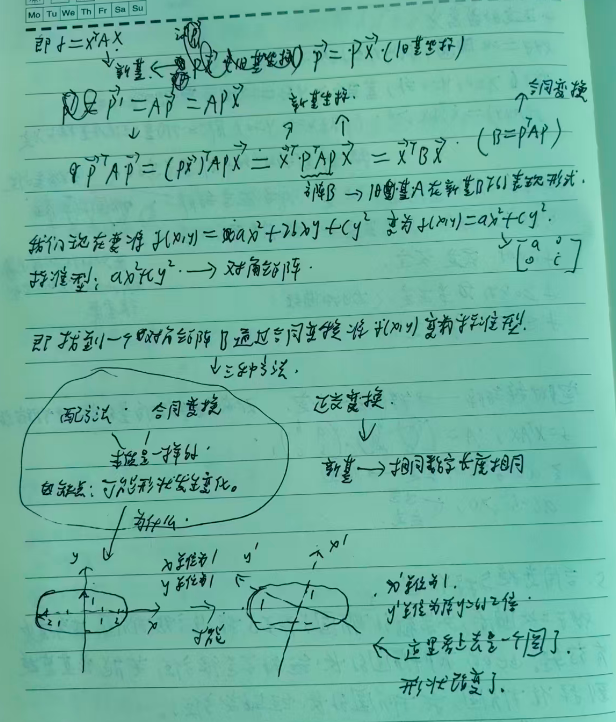
这是最深刻的几何解释。任何二次型 𝐱ᵀA𝐱 都可以通过一个旋转 (或更一般地,正交变换) 𝐱 = P𝐲 化为标准形(仅有平方项,没有交叉项):
Q = λ₁y₁² + λ₂y₂² + ... + λ_ny_n²
其中 P 的列向量就是 A 的特征向量(主轴方向),λ_i 就是对应的特征值。
几何意义 :无论原来的二次曲面在坐标系中多么"歪斜"(有交叉项 xy 等),总存在一个新的直角坐标系(由主轴构成),从这个角度看过去,这个曲面就是正着放的,其方程只剩下平方项。这就好比一个倾斜的椭圆,旋转到与坐标轴对齐后,方程就变得简洁。
b) 特征值的符号------决定形状的类型(分类)
在标准形 λ₁y₁² + λ₂y₂² + ... = 常数 中,特征值 λ_i 的符号至关重要。以二维为例 (λ₁y₁² + λ₂y₂² = 1):
| 特征值符号 | 二次型正定性 | 曲线 =1 的形状 |
三维曲面 =1 的类比 |
|---|---|---|---|
| λ₁>0, λ₂>0 | 正定 | 椭圆 | 椭球面 |
| λ₁<0, λ₂<0 | 负定 | 无图像(-1=1 时是椭圆) |
无图像 |
| λ₁>0, λ₂<0 | 不定 | 双曲线 | 单叶双曲面 |
| λ₁>0, λ₂=0 | 半正定 | 两条平行直线 | 椭圆柱面 |
几何意义:
-
所有特征值为正:图形在所有主轴方向上都"开口向上"(像碗状),等高线是封闭的椭圆(椭球)。
-
特征值有正有负:图形在某些方向上"向上",某些方向上"向下"(像马鞍面),等高线是不封闭的双曲线。
-
特征值有零:图形沿该主轴方向是"平坦延伸"的(像柱面或抛物面)。
c) 矩阵的正定性------能量与极值
二次型常常代表一种"能量"或"代价"。
-
正定二次型 (
𝐱ᵀA𝐱 > 0, ∀𝐱≠0):其图形像一个向上开口的碗 。在原点取唯一的极小值。这在优化问题中至关重要,意味着目标函数有唯一的最小值点。 -
半正定 :像一个槽 或平坦的通道,有最小值线或面。
-
不定 :像一个马鞍面 ,原点是一个鞍点,既非极大也非极小。
4. 实际应用中的几何意义
-
优化与机器学习:在损失函数中,二次型近似描述函数在极值点附近的曲率。正定的Hessian矩阵意味着局部最小值。
-
物理与工程:
-
在刚体力学中,转动惯量张量就是一个二次型,其对应的椭球叫惯性椭球,描述了刚体在不同轴向上旋转惯性的分布。
-
在弹性力学中,应变能函数常用二次型表示。
-
-
多元统计分析:
- 多元正态分布的指数部分
(𝐱-𝛍)ᵀΣ⁻¹(𝐱-𝛍)就是一个二次型,其等值面是椭球 ,描述了数据的分布范围和相关结构。协方差矩阵的逆Σ⁻¹决定了这个椭球的形状和方向。
- 多元正态分布的指数部分
-
微分几何:曲面的第二基本形式就是一个二次型,用来描述曲面的局部弯曲程度。
总结
二次型的几何意义,可以概括为:它是描述n维空间中二次曲面"形状DNA"的代数工具。
-
矩阵A 存储了这份DNA信息。
-
特征分解(主轴定理) 是解读这份DNA的密钥,它将曲面旋转到"标准姿态"。
-
特征值的符号和大小 直接告诉我们这个曲面是椭球、双曲面、柱面还是抛物面,以及它各个方向的陡峭程度。
-
正定性 则从整体上判断了这个曲面是"碗状"、"马鞍状"还是"平坦状",从而决定了其在优化问题中的极值性质。
理解了这个几何图像,很多关于二次型的代数性质(如合同变换、惯性定理等)就会变得非常直观。
2.1 等值面的形状
二次型  (常数)定义了空间中的等值面。
(常数)定义了空间中的等值面。
二维情况(两个变量):
-
正定:椭圆(或圆)
-
不定:双曲线
-
半正定:抛物线或直线
三维情况:
-
正定:椭球面
-
不定:双曲面或马鞍面
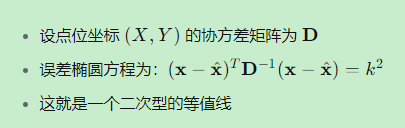
2.2 在测量中的直接对应
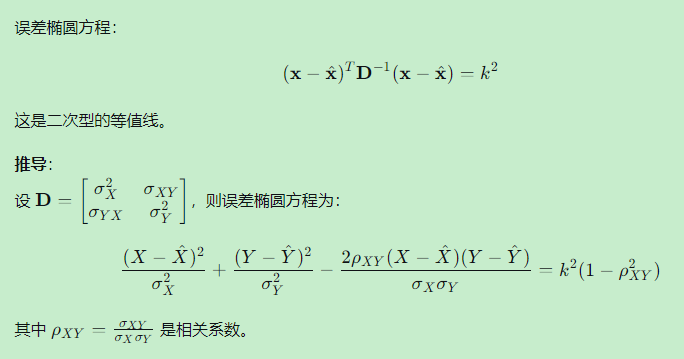
误差椭圆就是二次型等值面的直接体现!
三、二次型的标准形与合同变换
3.1 为什么需要标准形?
原始二次型包含交叉项,几何形状可能是倾斜的。通过坐标变换,可以消除交叉项,使几何形状"摆正"。
目标:找到新坐标系,使二次型变为:

只有平方项,没有交叉项。
3.2 两种主要方法
方法一:配方法(代数方法)
逐步配方消除交叉项。
方法二:正交变换法(特征值法)
这是更系统的方法,基于矩阵的特征值分解。
步骤:
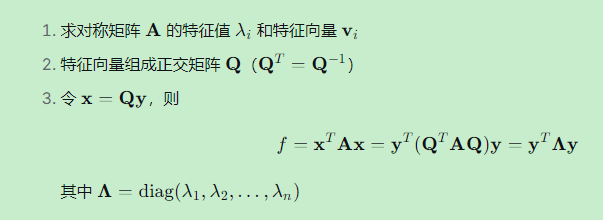
几何意义:特征向量给出了等值面的主轴方向,特征值的平方根给出了主轴长度。
3.3 在测量中的意义
误差椭圆的主轴方向 正是协方差矩阵的特征向量方向,主轴长度与特征值的平方根成正比。
# 计算误差椭圆的主轴
import numpy as np
# 假设协方差矩阵
D = np.array([[0.25, 0.12],
[0.12, 0.16]])
# 特征分解
eigenvalues, eigenvectors = np.linalg.eig(D)
print("协方差矩阵D:")
print(D)
print("\n特征值(主轴长度的平方):", eigenvalues)
print("特征向量(主轴方向):")
print(eigenvectors)
# 计算主轴长度(假设k=1,1σ椭圆)
axis_lengths = np.sqrt(eigenvalues)
print("\n误差椭圆主轴长度:", axis_lengths)
# 主轴方向角(从x轴逆时针)
theta = np.arctan2(eigenvectors[1, 0], eigenvectors[0, 0])
print("长轴方向角(度):", np.degrees(theta))四、正定二次型与正定矩阵
4.1 正定的定义
几何意义 :等值面是封闭的椭球面 ,在原点处有严格最小值。
4.2 判断正定的方法
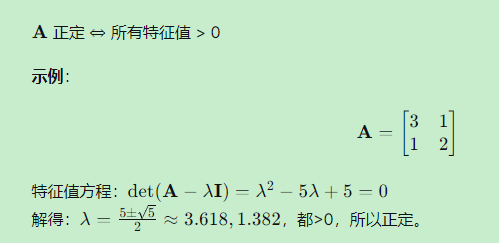
方法1:特征值判断
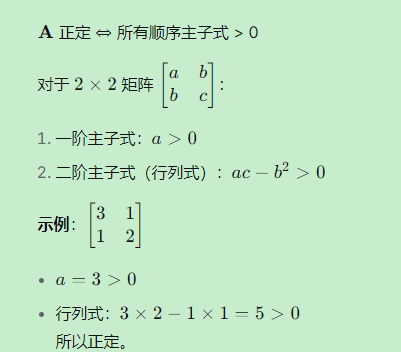
方法2:主子式判断(Sylvester准则)
方法3:平方和分解

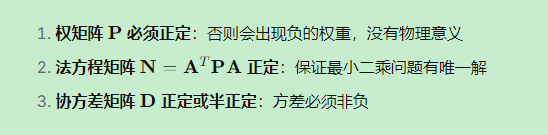
4.3 在测量平差中的重要性
4.4 半正定矩阵

特点:
-
所有特征值 ≥ 0
-
等值面可能是椭球面、椭圆柱面或更退化的形状
-
在平差中,当参数存在线性相关时,法方程矩阵可能半正定(奇异)
五、二次型的导数与极值
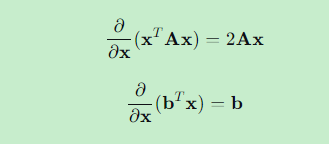
5.1 导数公式
对于对称矩阵 A:
5.2 最小二乘问题的推导
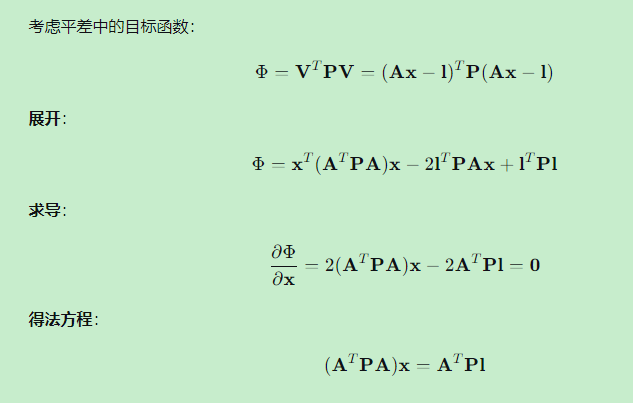
5.3 极值性质

在平差中,这意味着:在正确的模型下,最小二乘解确实使目标函数最小。
六、在测量平差中的核心应用
6.1 最小二乘准则的本质
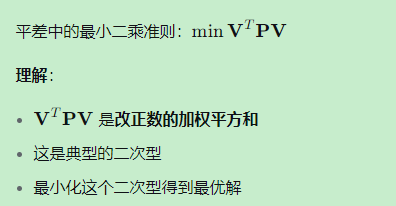
6.2 精度评定中的二次型
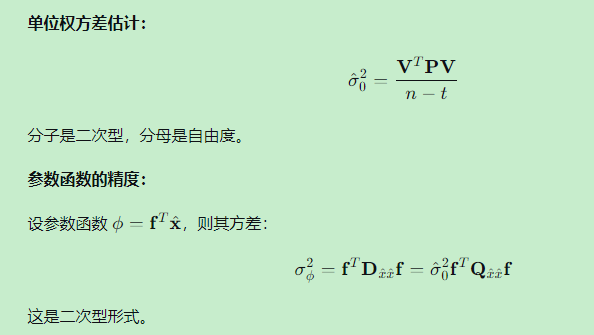
6.3 假设检验的统计量
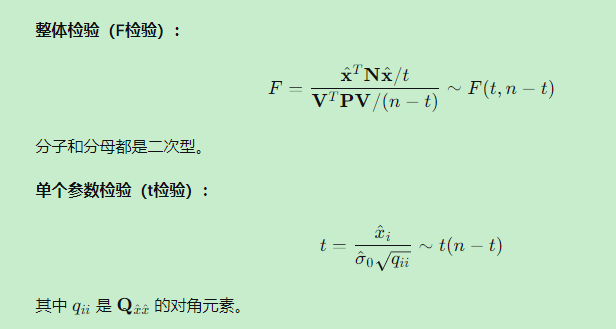
6.4 误差椭圆的数学基础
七、数值计算与实际编程
7.1 二次型的数值计算
import numpy as np
# 方法1:直接计算
def quadratic_form_direct(x, A):
"""直接计算二次型 x^T A x"""
return x.T @ A @ x
# 方法2:利用对称性(更高效)
def quadratic_form_efficient(x, A):
"""利用对称性的高效计算"""
# A是对称的,可以优化
return np.sum(A * np.outer(x, x))
# 方法3:Cholesky分解(最稳定,A正定时)
def quadratic_form_cholesky(x, A):
"""通过Cholesky分解计算"""
L = np.linalg.cholesky(A) # A = L L^T
y = L.T @ x
return np.sum(y**2)
# 示例
A = np.array([[4, 1], [1, 3]]) # 对称正定矩阵
x = np.array([2, 3])
print("直接计算:", quadratic_form_direct(x, A))
print("高效计算:", quadratic_form_efficient(x, A))
print("Cholesky方法:", quadratic_form_cholesky(x, A))7.2 平差中的实际计算
class LeastSquaresAdjustment:
"""最小二乘平差类"""
def __init__(self, A, P, l):
"""
A: 设计矩阵
P: 权矩阵
l: 常数项向量
"""
self.A = A
self.P = P
self.l = l
self.n, self.t = A.shape
def solve(self):
"""解法方程"""
# 法方程系数矩阵
N = self.A.T @ self.P @ self.A
# 法方程常数项
U = self.A.T @ self.P @ self.l
# 求解参数
x_hat = np.linalg.solve(N, U)
# 计算残差
V = self.A @ x_hat - self.l
# 单位权方差
VTPV = V.T @ self.P @ V # 二次型!
sigma0_sq = VTPV / (self.n - self.t)
# 参数协因数阵
Q_xx = np.linalg.inv(N)
return {
'parameters': x_hat,
'residuals': V,
'sigma0_sq': sigma0_sq,
'Q_xx': Q_xx,
'VTPV': VTPV # 二次型值
}
def error_ellipse(self, index1=0, index2=1, confidence=0.95):
"""计算两个参数的误差椭圆"""
Q_sub = self.result['Q_xx'][[index1, index2], :][:, [index1, index2]]
# 特征分解
eigenvalues, eigenvectors = np.linalg.eig(Q_sub)
# 卡方值 (2个自由度)
from scipy import stats
k_sq = stats.chi2.ppf(confidence, 2)
k = np.sqrt(k_sq)
# 椭圆参数
axis_lengths = k * np.sqrt(eigenvalues * self.result['sigma0_sq'])
orientation = np.arctan2(eigenvectors[1, 0], eigenvectors[0, 0])
return {
'semi_major': np.max(axis_lengths),
'semi_minor': np.min(axis_lengths),
'orientation': np.degrees(orientation),
'axis_lengths': axis_lengths,
'eigenvectors': eigenvectors
}
# 使用示例
A = np.array([[1, 0], [0, 1], [1, 1]])
P = np.diag([1, 1, 0.5])
l = np.array([2.1, 3.2, 5.0])
adjustment = LeastSquaresAdjustment(A, P, l)
result = adjustment.solve()
print("参数估计:", result['parameters'])
print("单位权方差:", result['sigma0_sq'])
print("V^T P V =", result['VTPV'])
ellipse = adjustment.error_ellipse()
print("\n误差椭圆参数:")
print(f"长半轴: {ellipse['semi_major']:.4f}")
print(f"短半轴: {ellipse['semi_minor']:.4f}")
print(f"方位角: {ellipse['orientation']:.2f}°")八、二次型的深入理解
8.1 二次型与内积
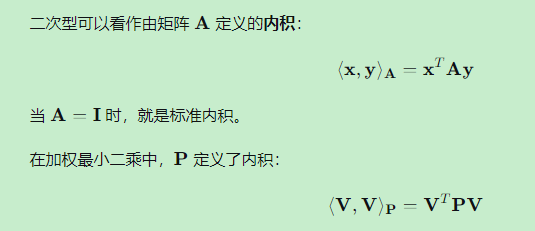
最小二乘就是在这个内积意义下找最短的残差向量。
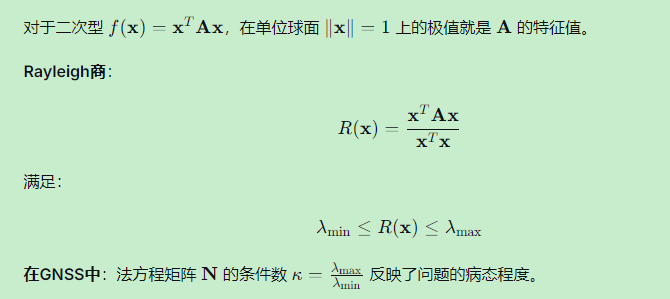
8.2 二次型与特征值的关系
8.3 合同变换的几何意义
九、常见误区与澄清
误区1:认为所有二次型都能写为平方和
只有正定或半正定矩阵对应的二次型才能写为完全平方和。不定的二次型可能有负的平方项。
误区2:混淆二次型与二次函数
二次型没有一次项和常数项。平差中的目标函数是二次函数(包含二次项、一次项和常数项),但核心是其中的二次型部分。
误区3:忽视矩阵的对称性
误区4:认为权矩阵总是对角的
在观测值独立时,权矩阵是对角阵。但在相关观测时,权矩阵有非对角线元素。双差观测就是一个典型例子。
十、学习建议与总结
10.1 学习路径建议
-
从具体到抽象:先掌握2×2矩阵的二次型,理解几何意义
-
联系实际应用:用平差中的例子理解二次型的作用
-
动手编程实现:通过代码加深理解
-
理论联系几何:画出等值线,直观理解
10.2 在误差理论和平差中的核心地位
二次型是连接以下概念的桥梁:
-
线性代数 ↔ 统计学 ↔ 测量平差
-
矩阵运算 ↔ 几何形状 ↔ 精度评定
10.3 关键要点总结
10.4 特别建议
在AGNSS开发中,学习二次型时:
-
联系实际:回想GNSS定位中哪些地方用到了二次型
-
从几何理解:将抽象的公式与误差椭圆等几何图像联系
-
编程验证:实现二次型的计算,验证理论结果
-
思考应用:如何用二次型优化现有的平差算法
二次型不是孤立的数学概念,而是理解现代测量平差理论的钥匙。掌握了它,就能更深入地理解从最小二乘到卡尔曼滤波的各种算法本质。
二次型的一些笔记: