最近事情多,也是很久没有更新了,现在快速记录几个知识点
visual component是一家被美的收购的仿真软件平台,功能非常强大,支持市面上所有机器人,而kuka sim或者kuka sim pro只是vc的一个阉割版,它不仅是生产线的仿真,还包含AGV,AMR,叉车等智能物流装备,我们常接触的robot guide并不具备以上功能,但是vc需要显卡渲染,对电脑的配置要求也高,国产的机器人比如aubo并无发布类似robot guide的在线编程示教软件, 当只有供应商提供的数模,有没有最快的办法,做下机器人的运动模拟,有的!这里只介绍catia非常好用的DMU运动学分析功能
这里以国内常见的协作机器人为例
在catia结构书中,必须将6个轴单独设置成part零件,并导入,如果6个轴的数模在catia的结构树中,是个集合 ,则无法完成dmu功能,stp的集合图形,各个部分如何拆分成单独的part零件,请自行研究
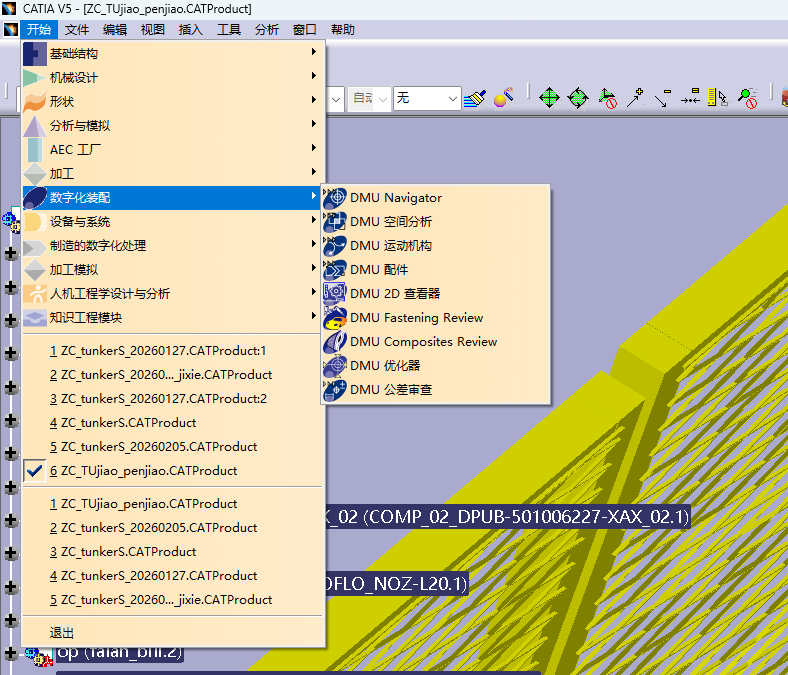
选择DMU 运动机构
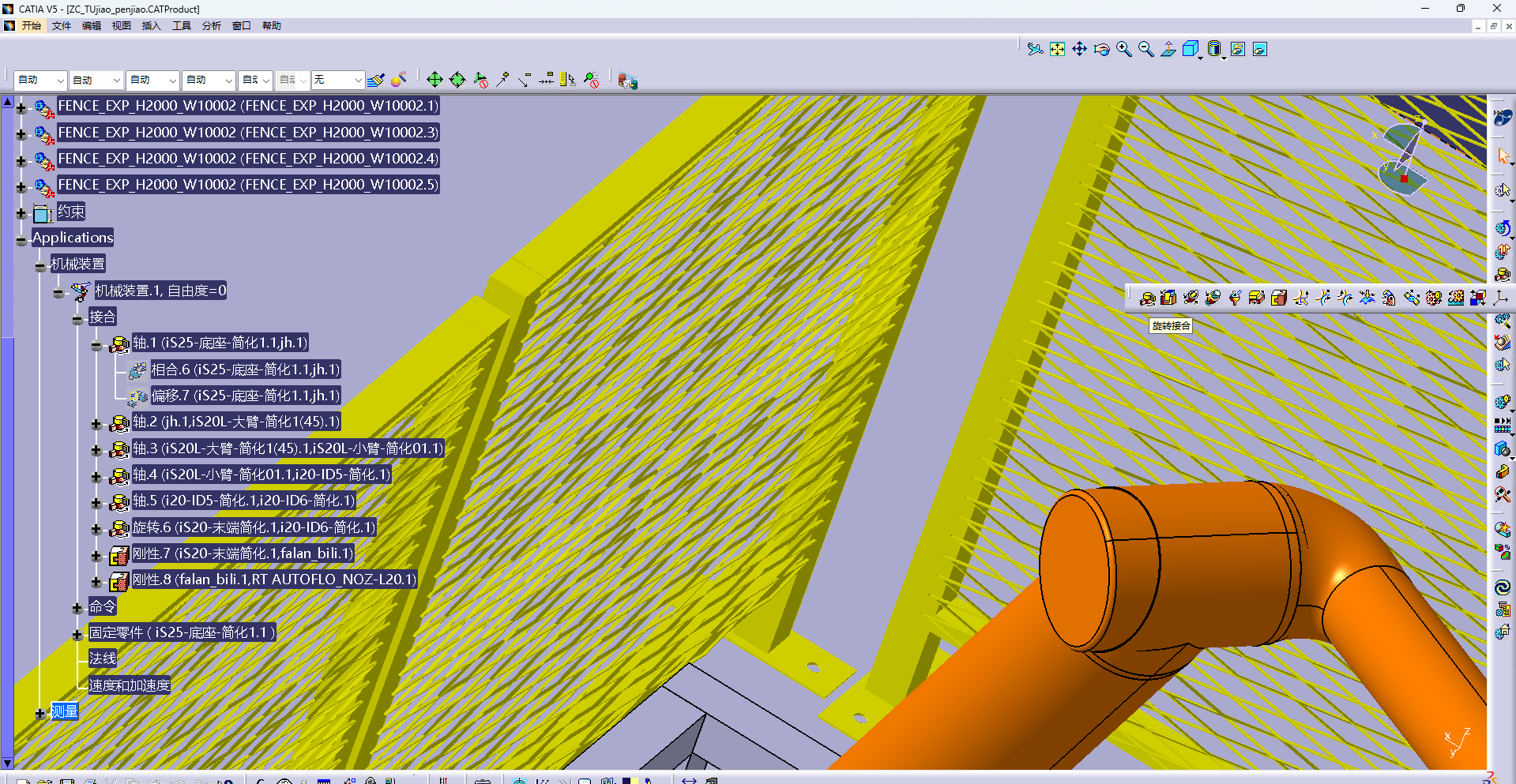
选择右侧的旋转结合
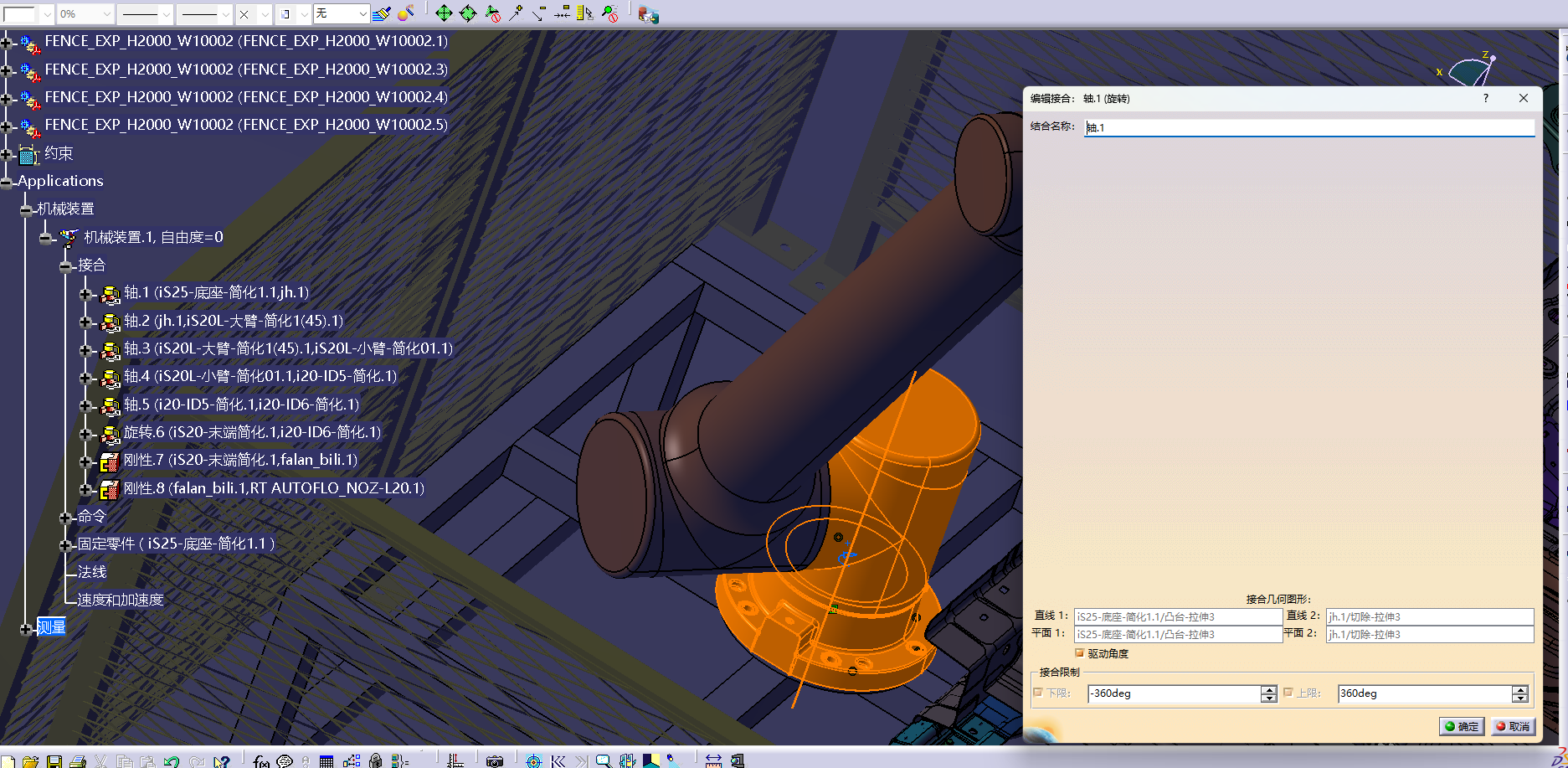
设置旋转机构的名称,这里命名为轴1,需要在底座和1轴,设置两者的旋转中心,即轴线,和旋转运动的结合面,也就是指定2条轴线,2个平面,选定后,选择驱动角度
这里依次设置1轴、2轴、3轴、4轴、5轴、6轴、
最后我们需要设置六轴法兰支架和支架上安装的工具,这里以涂胶为例
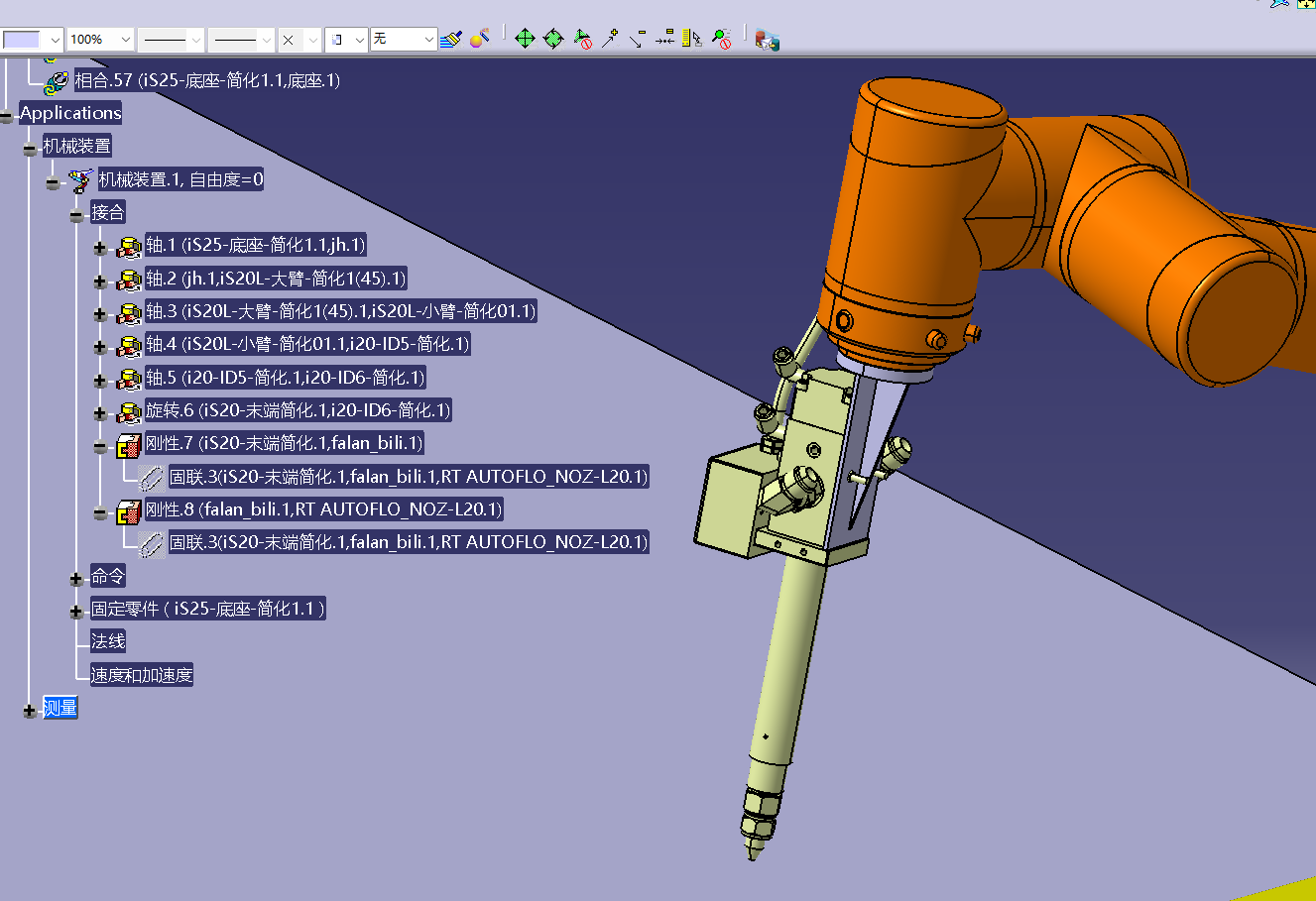
这里,灰白色的为连接法兰支架,黄色的为胶枪,首先进入装配设计,对法兰连接支架和机器人六轴法兰端面进行约束(相合和曲面约束,这里不再赘述),对胶枪和法兰支架同样进行装配设计,使其组合,如果第三方的数模的安装面无法选中,是因为格式或者设计图不对,需要进入零件设计,重新画一个薄薄的半透明安装面,使其可以被选中即可,然后进入装配设计进行安装,最后切换到DMU运动分析,进行以上application,机械装置1里面的接合,对六轴和法兰连接板,法兰连接板和胶枪,进行刚性的连接,即可完成机械装置的设定
双击机械装置1
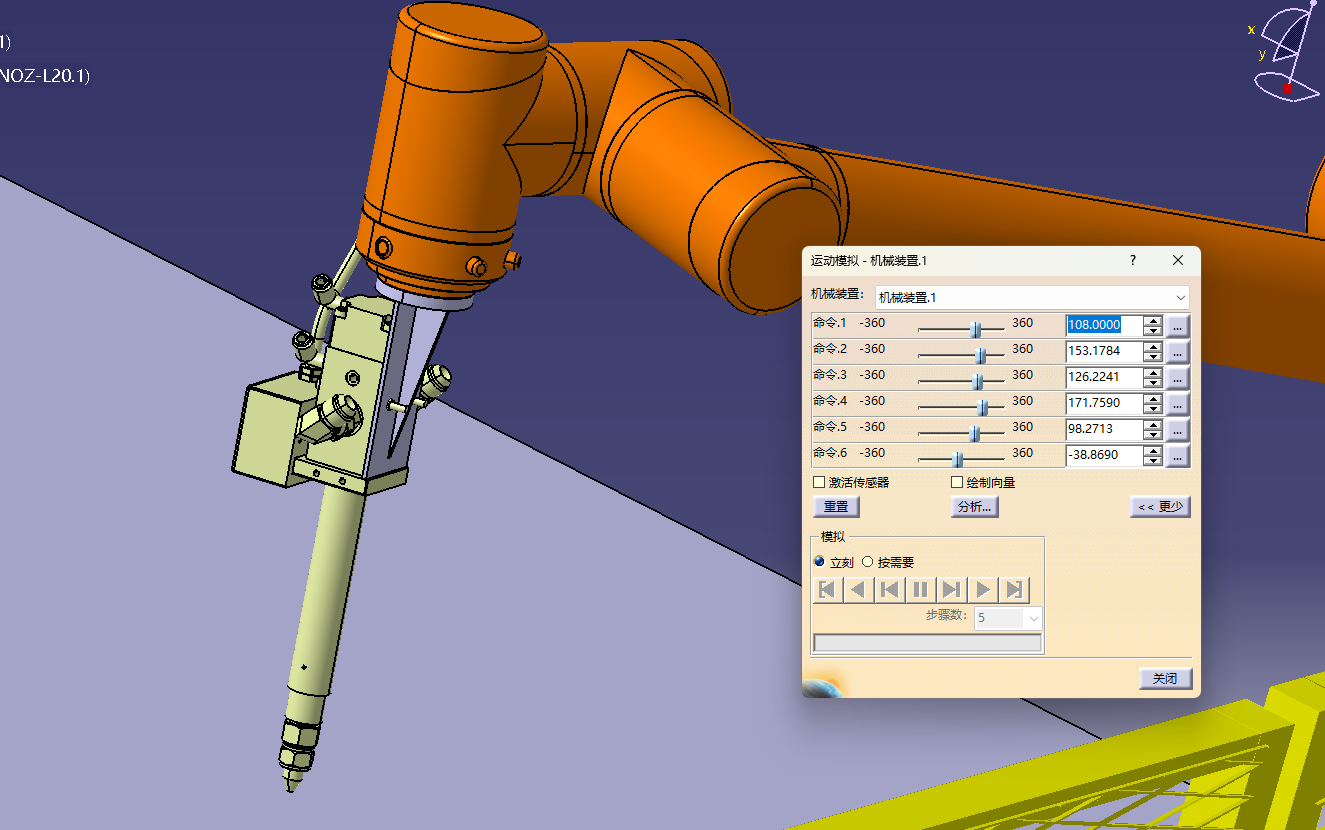
直接拖动或者输入角度值
或者在3D图中,直接用鼠标拖动上图中两个箭头的灰色弧形箭头,即可完成对机器人的实时姿态控制,但是以上只是相当于的机器人的jog移动功能,需要word或者tool或者自定义的坐标系下的移动,并不具备功能
以上的描述,只适合无示教在线编程软件的机器人的路径可达性验证,在初期方案制定具有指导意义,但是验证并仿真,实时的节拍或者移动效果,此方法并不具备功能,对于主流的工业机器人仿真,还是建议使用自家的如robot guide,robot studio,kuka sim pro,visual conponent等专用的仿真软件,
以上,完毕