作者:billy
版权声明:著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处
前言
使用超级好用的国产开源神器------鱼香ROS一键安装工具
前提条件:
- 确认你的 Ubuntu 版本,需要 Ubuntu 20.04 以上版本:
lsb_release -a - 保证网络通畅
- 准备至少20GB磁盘空间(ROS比较占空间)
安装 ROS2 操作流程
-
获取安装脚本并启动安装程序:
wget http://fishros.com/install -O fishros && . fishros -
输入 5(一键配置系统源)
-
输入 2(更换系统源并清理第三方源)
-
输入 1(添加 ROS / ROS2 官方源)
-
完成后系统 apt 源已经彻底准备好
-
再次获取安装脚本并启动安装程序:
wget http://fishros.com/install -O fishros && . fishros -
输入 1:一键安装 ROS / ROS2
-
选择:不更换源安装(因为之前已经换好)
-
选择镜像源:推荐中科大
-
选择 ROS2 版本:推荐 humble / jazzy(LTS版本)
-
选择具体版本:推荐桌面版
-
安装过程需要安装 1000 个左右的软件包,请耐心等待
安装依赖包
安装 moveit 和 controller-manager 及相关的依赖包:
sudo apt update
sudo apt install \
ros-jazzy-moveit \
ros-jazzy-controller-manager \
ros-jazzy-joint-state-broadcaster \
ros-jazzy-forward-command-controller \
ros-jazzy-effort-controllers \
ros-jazzy-velocity-controllers \
ros-jazzy-position-controllers \
ros-jazzy-joint-trajectory-controller
source /opt/ros/jazzy/setup.bash安装 joint_state_publisher 基础包 + 图形界面版:
sudo apt update && sudo apt install ros-jazzy-joint-state-publisher ros-jazzy-joint-state-publisher-gui配置环境变量(永久)
- 查看 ROS2 位置:
whereis ros2 - 配置环境变量:
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc - 配置生效:
source ~/.bashrc
验证安装是否成功
- 打开第一个终端:
ros2 run turtlesim turtlesim_node
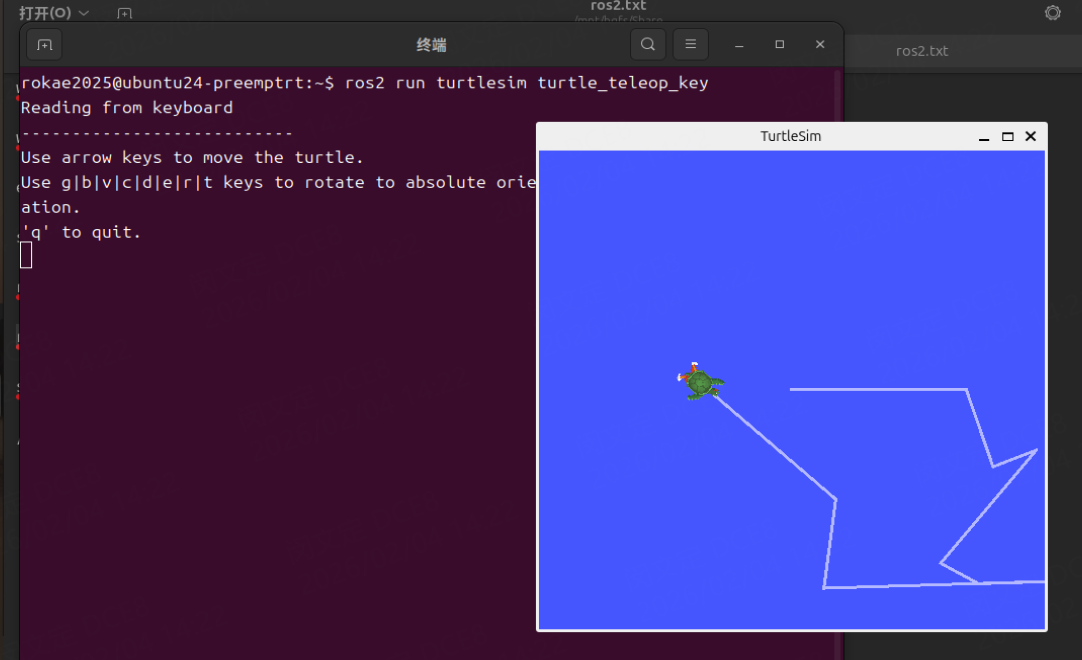
会看到小乌龟窗口 - 打开第二个终端:
ros2 run turtlesim turtle_teleop_key
按方向键能控制乌龟 → ROS2 100% 安装成功!
现场急救指南
- Q1:安装卡在某个包怎么办?
- Ctrl+C 终止后重新运行脚本
- Q2:提示依赖冲突?
- 执行:
sudo apt --fix-broken install - Q3:环境变量不生效?
- 执行:
source ~/.bashrc - Q4:遇到问题怎么办?
- 查看日志:
/var/log/fishros.log
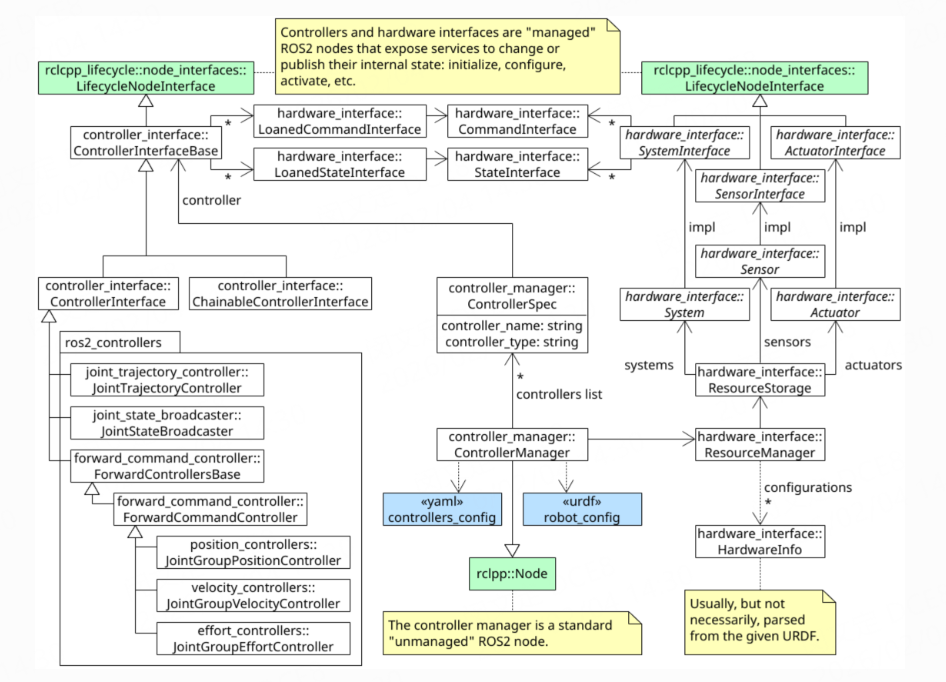
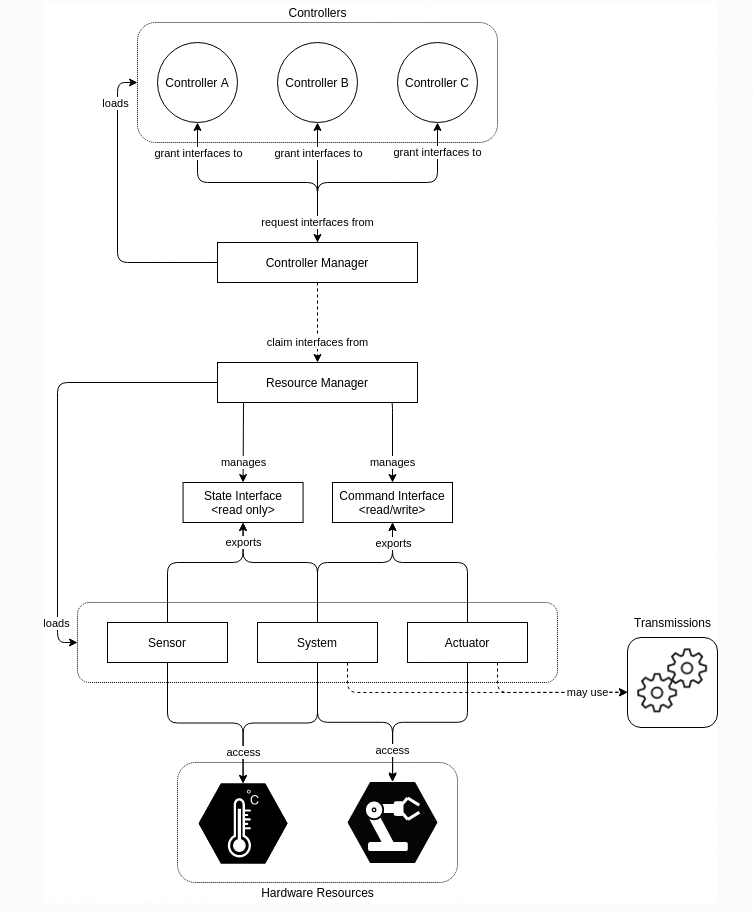
ROS2_control 架构
UML class