1、数学原理:为什么 PCA 可以得到法向?

(1) 求几何中心

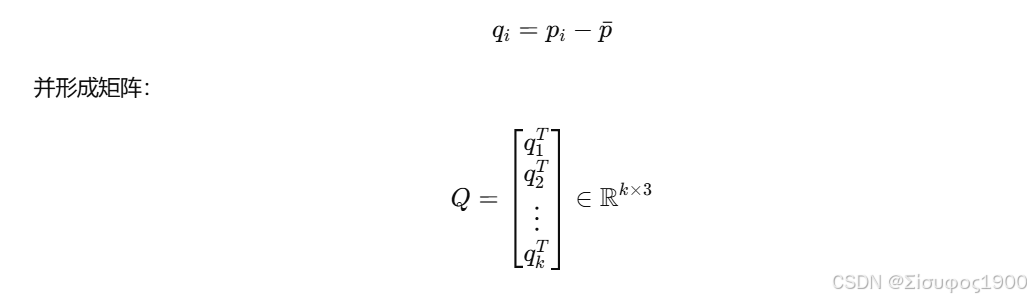
(2) 构建去中心化矩阵
(3) 协方差矩阵
PCL、Open3D、SLAM 全部采用

这个矩阵描述了在 x, y, z 方向的"离散程度":
-
平面方向 → 大的特征值
-
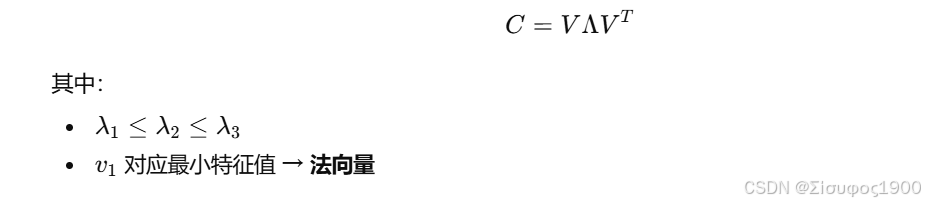
法向方向 → 数据最不分散,因此特征值最小
所以:
局部平面法向 = 最小特征值对应的特征向量
(4) PCA 分解
2. 为什么"最小特征值对应法向"?
因为:
-
局部邻域近似平面
-
平面中点分布在 2D 平面
-
法向方向数据"最不分散"(投影方差最小)
几何解释:
点云 → PCA 两个最大特征值 → 局部主方向 最小特征值方向 → 垂直于平面的方向
这是最经典、最重要的法向理论面试点。
3、协方差矩阵 C 的结构解释(高频考)
协方差矩阵:

描述的是:
-
主方向(切平面方向) → 最大特征值
-
次主方向
-
法向(最微小方向) → 最小特征值
你可以直接告诉面试官:
PCA 的法向是"最不分散方向"。因此协方差矩阵的最小特征向量必定是法向。PCL 正是这么实现的。
4. MATLAB 完整实现
cpp
function N = pca_normals_albert(P, k)
% P: Nx3 点云
% k: 邻域点数量
% N: Nx3 法向矩阵
N = zeros(size(P));
Mdl = createns(P,'NSMethod','kdtree');
for i = 1:size(P,1)
% 1) 找k邻域
idx = knnsearch(Mdl, P(i,:), 'K', k);
pts = P(idx,:);
% 2) 计算局部中心
pbar = mean(pts,1);
% 3) 去中心化
Q = pts - pbar;
% 4) 协方差矩阵 (PCL风格)
C = (Q' * Q) / k;
% 5) PCA 求法向
[V, D] = eig(C);
[~, j] = min(diag(D));
normal = V(:, j);
% 6) 方向统一
if normal(3) < 0
normal = -normal;
end
N(i,:) = normal';
end
end
cpp
>> %% 1. 加载点云
ptCloud = pcread("bun000.ply");
P = ptCloud.Location;
%% 2. 计算 PCA 法向
N = pca_normals_albert(P, 30);
%% 3. 显示
figure; hold on; axis equal;
pcshow(P);
title("PCA (kNN) 法向量");
% 每隔一定数量画箭头
step = 200;
quiver3(P(1:step:end,1), P(1:step:end,2), P(1:step:end,3), ...
N(1:step:end,1), N(1:step:end,2), N(1:step:end,3), 0.03, 'r');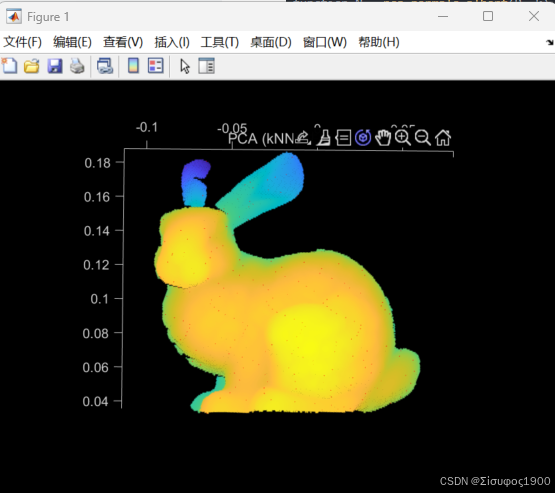
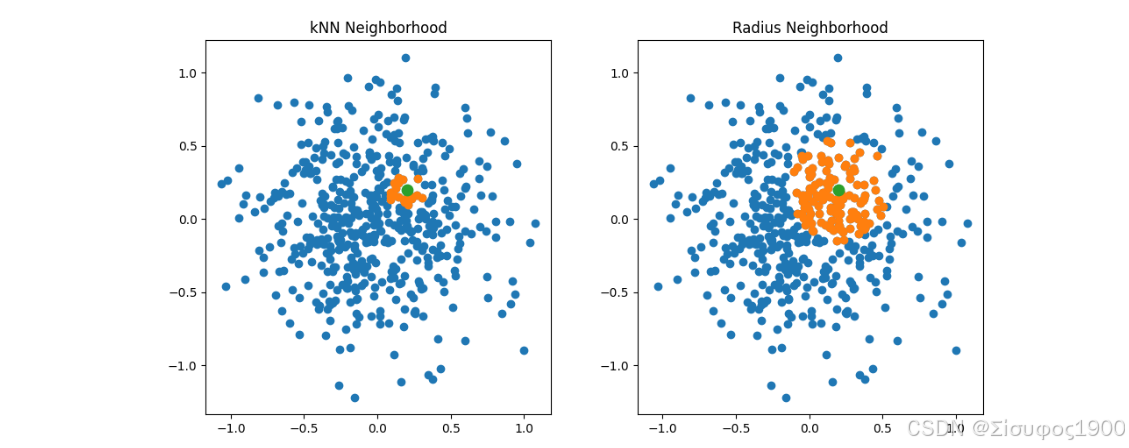
半径邻域 vs kNN 邻域对比图