PWM(Pulse Width Modulation)脉冲宽度调制,是一种通过改变脉冲信号的高电平持续时间(占空比)来模拟输出不同电压的技术。
占空比:在一个周期内,高电平时间与总周期时间的比值,通常用百分比表示。
新建工程,在SYS将Debug模式设置为Serial Wire,在RCC中设置高速时钟源为晶振,时钟时钟里时钟主频为72HMz。
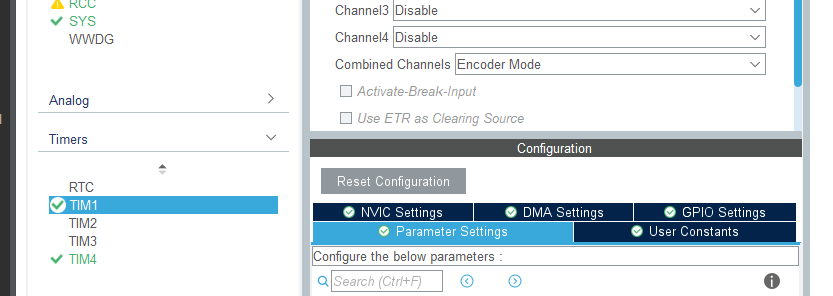
设置旋转编码器,在TIM1里面打开TIM1的旋转编码器模式。

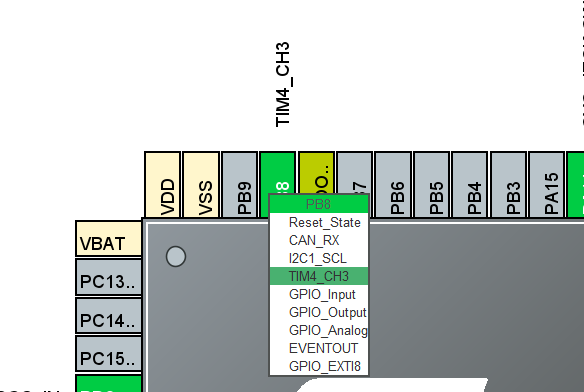
硬件连接使用的是PB8口对应TIM4的通道3
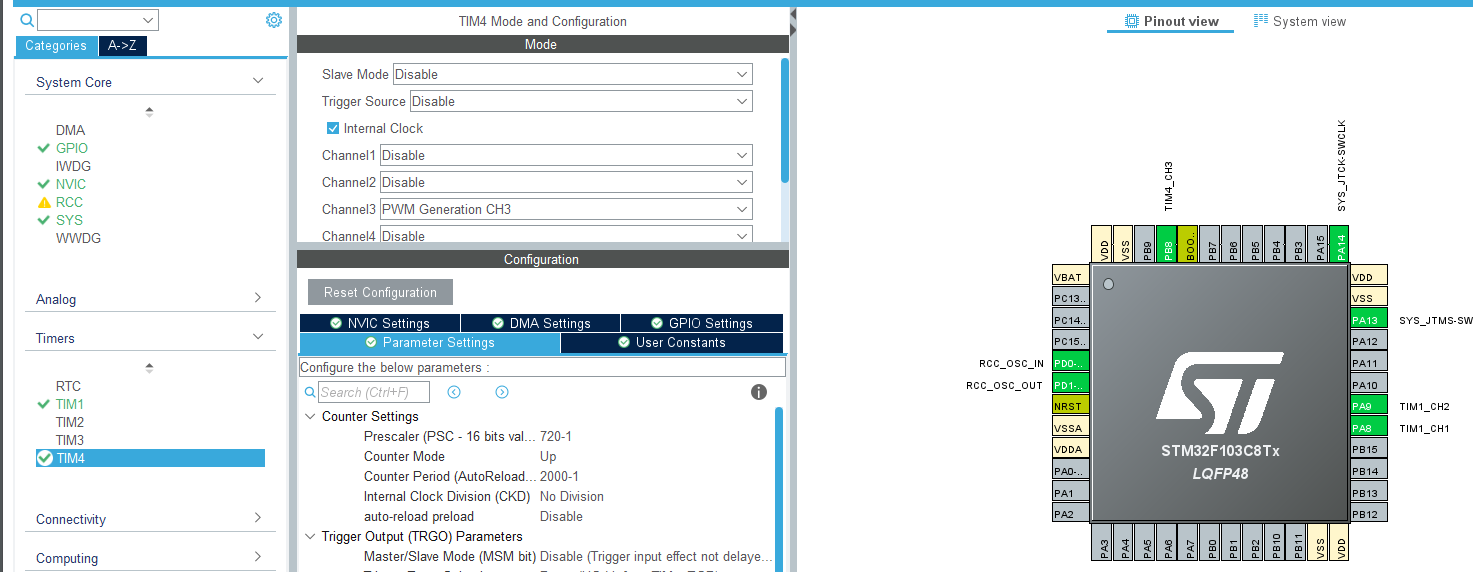
在TIM4勾选时钟源为内部时钟源将通道3设置为PWM生成模式
将PWM信号的频率控制在50MHz(72MHz / (预分频器)720分频 / 自动重装载(2000)= 50Hz)
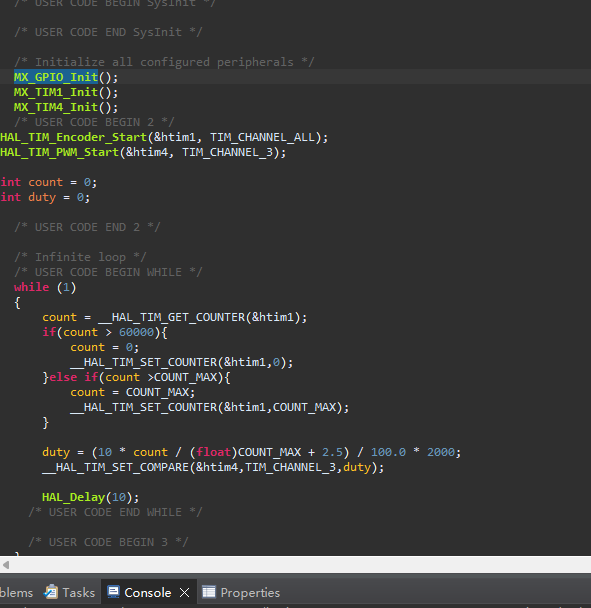
启动TIM1编码器模式来捕获编码器脉冲HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL);
启动TIM4通道3的PWM输出模式HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3);
编码器计数读取与保护:从TIM1读取当前计数值,并做了上限和下限保护,防止溢出或异常值。
PWM占空比计算:将编码器的计数值 count 经过一个公式转换为PWM比较值 duty ,从而控制输出波形的占空比。
PWM输出更新:通过 __HAL_TIM_SET_COMPARE 函数更新TIM4通道3的比较值,改变PWM输出。
程序最终实现效果:通过旋转编码器控制舵机旋转