今年STC单片机首次增设摄像头组别,相信不少备战的同学想要知道这颗新U是否能够快速上手并能够像传统摄像头组别一样,高效完成图像处理,提高车模控制系统上限。
其中最突出的痛点的是:有同学搭建完核心算法组合后,可能感觉到略微卡顿或系统延迟,影响车模调试上限,我们第一次搭建完经过测试单帧处理耗时高达20多ms,这导致车辆运行稳定性和反应速度受限、甚至可能有冲出赛道的情况发生,导致调试陷入瓶颈,提速困难,短时间内难以找到有效突破方向。
针对这一高频痛点,我们结合备战同学的实际调试场景,经过反复测试、迭代优化,整理出一套实用性极强的帧率优化思路,实测验证有效,优化后单帧处理耗时可稳定降至9-11ms,彻底解决卡顿难题,这里将图像处理和以西优化思路分享给大家,希望能够帮助到更多的同学!
实测数据对比,直观呈现优化效果
| 图像处理方案 | 单帧采集+处理耗时 |
|---|---|
| 未优化(采集+处理) | 20ms-25ms(能感觉到慢,上限较低) |
| 优化后(采集+处理) | 9ms-11ms(流畅稳定,提高了上限) |
同学们遇到的卡顿问题,核心症结主要集中在两点:一是内存资源不足,二是算法计算耗时过长。在拆解具体优化方法前,我们先补充基础知识点,帮助大家吃透核心原理、少走弯路------首先明确,摄像头获取到的图像为灰度图,后续的二值化、赛道识别均基于灰度图展开。
基础铺垫:灰度图、二值化与大津法核心解析
1. 灰度图:摄像头采集的核心图像格式
摄像头拍摄到的图像并非我们日常所见的彩色图,而是灰度图------这类图像仅包含明暗信息,不包含色彩信息,每个像素点的明暗程度用灰度值(0-255)表示。其中,灰度值0对应纯黑色,255对应纯白色,介于两者之间的数值则对应不同深浅的灰色,赛道与背景的差异,本质就是灰度值的差异。
2. 二值化:突出赛道特征的关键步骤
由于灰度图包含大量明暗渐变的像素点,直接用于赛道识别会增加计算量,因此需要进行二值化处理------二值化的核心是设定一个固定阈值,将灰度图中所有像素点的灰度值与该阈值对比,灰度值大于阈值的像素设为纯白色(对应赛道区域),小于等于阈值的像素设为纯黑色(对应背景区域),最终将灰度图转化为仅含黑白两色的二值图,清晰区分赛道与背景,为后续搜线算法简化计算。
为了让大家更直观理解阈值对二值化效果的影响,我们准备了一份灰度图用不同阈值二值化的结果动图,可清晰看到:不同阈值下,赛道与背景的区分效果差异明显,阈值选择不当会导致赛道轮廓模糊、背景干扰过多,甚至无法识别赛道。
3. 大津法:自动筛选最优二值化阈值的核心算法(原理详解)
二值化的关键在于阈值选择,手动设定阈值不仅效率低,还会受环境光照影响(光照变化会导致赛道与背景的灰度值差异变化),而大津法(也叫最大类间方差法),正是为解决这一问题而生的自动阈值筛选算法,其核心原理围绕"类间方差最大化"展开,无需手动干预,能适配不同光照场景,也是备战同学最常用的二值化算法。简单来说,大津法的核心逻辑是:通过遍历所有可能的灰度阈值(0-255),计算每个阈值对应的"类间方差",找到类间方差最大的阈值,即为最优二值化阈值------这是因为类间方差越大,代表赛道(一类像素)与背景(另一类像素)的灰度差异越明显,区分效果越好。
为了让大家更直观地理解大津法的原理及阈值筛选过程,我们同步准备了一张大津法示意图,图中清晰呈现了算法筛选最优阈值的核心逻辑。
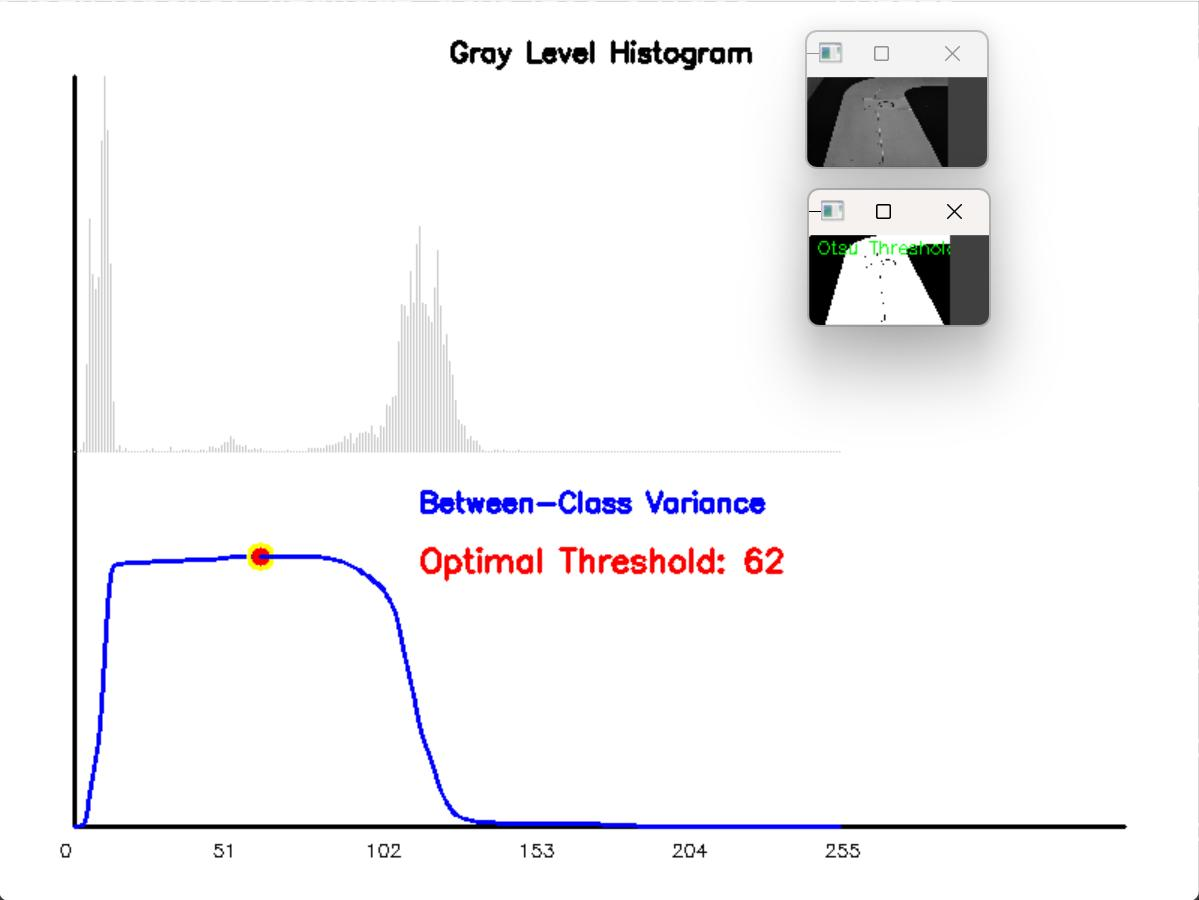
结合示意图,我们进一步拆解大津法原理的三个关键环节,对应图中三个核心部分:
-
直方图:示意图上方的灰色柱状图,是大津法计算的基础,用于显示该灰度图的灰度分布情况。横轴为灰度值(0-255),纵轴为对应灰度值的像素数量,从直方图中可直观看到,赛道与背景的像素会分别集中在两个不同的灰度区间(这是大津法能生效的前提),我们可通过直方图初步判断赛道与背景的灰度差异范围。
-
方差曲线:示意图下方的蓝色曲线,是大津法原理的核心体现,代表每个灰度阈值(0-255)对应的类间方差(Between-Class Variance)。类间方差是衡量"赛道类像素"与"背景类像素"灰度差异的核心指标,其计算逻辑是:将图像按当前阈值分为前景(假设为赛道)和背景两类,计算两类像素的灰度均值之差的平方,再结合两类像素的数量占比,最终得到类间方差。曲线的每个点,都对应一个阈值的类间方差结果。
-
最佳阈值:图中用红圈标记的曲线最大值点,是大津法的最终输出,即为自动筛选的最优二值化阈值。结合大津法"类间方差最大化"的核心原理,这个最大值点对应的阈值,能让赛道与背景的灰度差异达到最大,从而最大程度区分赛道与背景,完美规避手动设定阈值的弊端,也能适配光照变化带来的灰度值波动。
精准优化------针对大津法,破解内存与耗时痛点
了解基础原理后,我们回归核心优化需求。大家常用的188×120分辨率图像,若直接定义两个完整数组,可能会出现内存不够的问题;同时,每帧均遍历全图像素计算阈值,会大幅增加计算耗时,进而导致卡顿现象。
经过多轮测试验证,我们总结出两个实用的优化技巧,二者组合使用可实现效果翻倍,且不影响图像识别精度。
技巧1:图像下采样------平衡效率与精度,降低资源占用
针对大家调试时最常遇到的「内存不够」「单帧处理耗时久」两个问题,我们给出最简单、易操作的下采样实操方法,不用复杂修改代码,具体操作如下:大家常用的图像分辨率是188×120(宽188像素、高120像素),下采样核心就是「隔一行取一行、隔一列取一列」,直接将原图尺寸压缩一半,最终得到94×60分辨率的图像(188÷2=94,120÷2=60),后续仅用这张压缩后的图像,执行大津法阈值计算即可。
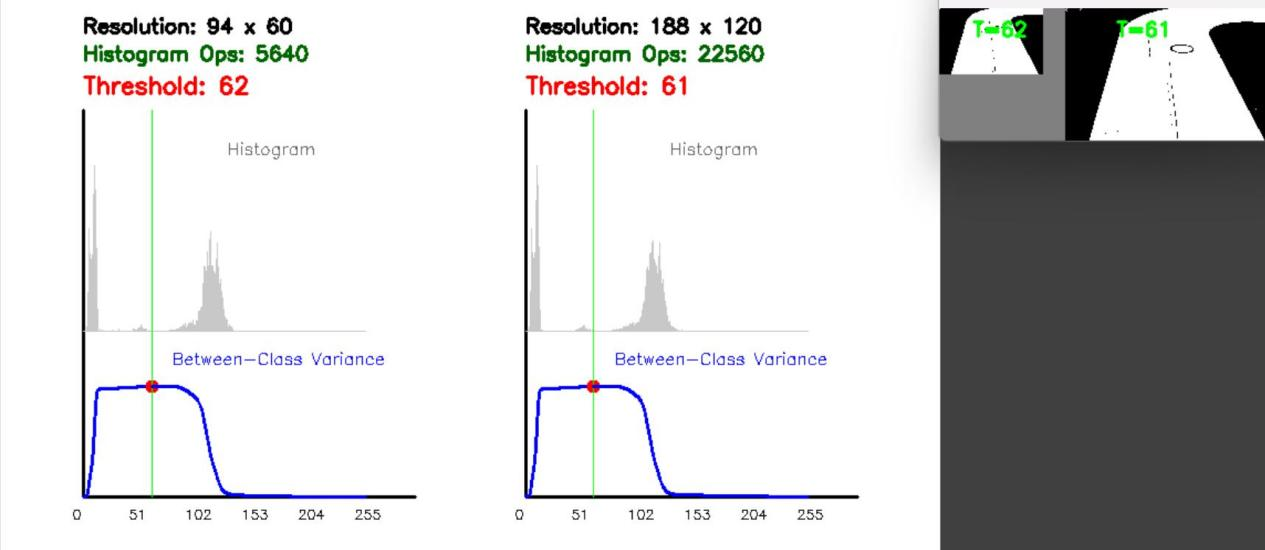
为了让大家更直观感受下采样的优化效果,我们结合对比图,将188×120(未优化分辨率)与94×60(下采样后分辨率)的核心关键数据,清晰拆解如下,每一组数据都能直接体现下采样的优势,大家一看就懂、一用就会:
首先来看下采样后的94×60分辨率(优化后),其核心数据如下:分辨率为94×60,对应大津法计算阈值时需遍历的直方图操作数仅为5640次,最终计算出的最优阈值为62;
再对比我们常用的、未优化的188×120分辨率:其分辨率为188×120,直方图操作数高达22560次,刚好是94×60分辨率的4倍(标注为x4),而最终计算出的最优阈值为61。
单看这两组数据,就能清晰发现下采样后的图片阈值几乎一样,但是计算量小了4倍!
技巧2:帧间采样------依托场景特性,大幅缩减重复计算
结合大家实际调试的赛道行驶场景不难发现,环境光照的变化具有明显连续性,不会出现突变情况,这就意味着,相邻两帧图像的最优二值化阈值差异极小,完全无需每帧都重复执行完整的大津法阈值计算,可通过"复用阈值"减少冗余操作。
基于这一核心特性,我们为大家整理了简单易落地的"计算帧+继承帧"循环优化模式:每10-20帧(可根据自身赛道的光照情况、赛道复杂度,灵活调整N值),执行一次完整的大津法阈值计算(即"计算帧");其余中间帧无需重复计算,直接复用上一计算帧得出的最优阈值(即"继承帧")。
这一优化策略效果十分显著,可将大津法的计算负载降低90%以上,有效为车辆控制等其他核心算法腾出更多CPU运行时间,进一步提升系统帧率的稳定性,让车辆运行更流畅,助力大家高效完成调试。
最优优化组合:下采样+帧间采样,双重赋能,彻底破局卡顿
结合前文两种优化技巧的核心优势,我们强烈推荐大家将二者搭配使用,实现内存占用与计算耗时的双重减负、双重提升,实操简单且不影响识别精度:建议大家始终在下采样后的94×60分辨率图像上执行大津法阈值计算,同时搭配每10帧(示例值,可根据自身赛道光照、复杂度灵活调整)计算一次阈值的帧间采样模式,兼顾便捷性与优化效果。
两种技巧组合后的预估优化效果十分显著:内存占用可稳定降至原来的1/4,彻底规避内存不够的问题;计算量直接缩减至原来的1/40,大幅降低CPU负载,调试中的卡顿难题可彻底根治,同时系统帧率稳定性会得到显著提升,帮助大家节省调试时间、高效推进备战进度,轻松突破帧率瓶颈。
两种常用搜线算法实测对比
解决大津法优化问题后,搜线算法的合理选型也能进一步提升系统效率,帮助同学们少走弯路。以下为两种常用搜线算法的实测对比,供大家结合自身基础和赛道场景参考选择。
① 八邻域搜线法------隧道摸墙,精准追踪赛道边界
八邻域搜线的原理其实特别好理解,我们用一个生活化的类比就能吃透:想象自己身处一条漆黑的隧道中,看不到前方的路,想要顺利走出隧道,最稳妥的方法就是双手摸着隧道的一侧墙壁,顺着墙壁的轮廓一步步向前走------八邻域搜线,本质就是让程序"摸"着赛道的边界,一步步向上追踪,精准找到整条赛道的轮廓。
先给大家明确左右边界的核心搜线流程,记准这个流程,再看示意图会更易理解:
-
左边界:采用逆时针搜索,顺序固定:先搜当前像素的右边 → 再搜右上角 → 接着搜上面 → 然后搜左上角 → 最后搜左边,搜到边界点后就停止,不再继续排查其他方向;
-
右边界:采用顺时针搜索(与左边界方向相反),按照对应对称顺序排查相邻像素,同样搜到边界点后停止,确保始终贴合赛道边缘追踪。
这张是5×5细节示意图,清晰标注左边界逆时针搜索的每一个步骤,可直观看到程序"摸墙"的具体路径,对照上面的流程就能快速对应上每一步操作:
核心原理(结合类比+实操步骤):和"隧道摸墙"一样,八邻域搜线核心就是"先找墙、再摸墙走",具体分为3个简单步骤,对应程序的执行逻辑,没有复杂术语,直白易懂:
-
找"墙根"------确定初始边界点:首先在图像的最底部(对应车辆近处的赛道,也是赛道最清晰、最容易定位的位置),从图像中间向左右两边搜索,找到黑白跳变点(黑色对应背景、白色对应赛道),这两个跳变点就是赛道的初始左边界和初始右边界,相当于我们摸到隧道墙壁的第一个触点。
-
摸"墙走"------沿边界向上追踪:找到初始边界点后,程序就开始像我们摸隧道墙壁一样,顺着赛道边界向上追踪,每一步都会仔细检查当前像素的相邻像素(即八邻域范围),精准锁定下一个边界点,确保不偏离赛道轮廓。
-
定"方向"------左右边界搜索有讲究:重点注意!左边界和右边界的搜索方向不一样,避免搜线跑偏,结合5×5细节示意图,具体顺序如下(记准这个顺序,调试不踩坑):
-
左边界:采用逆时针搜索,顺序固定:先搜当前像素的右边 → 再搜右上角 → 接着搜上面 → 然后搜左上角 → 最后搜左边,搜到边界点后就停止,不再继续排查其他方向;
-
右边界:采用顺时针搜索(与左边界方向相反),按照对应对称顺序排查相邻像素,同样搜到边界点后停止,确保始终贴合赛道边缘追踪。
结合上述搜线原理与流程,我们来看94×60分辨率图像的八邻域搜线整体效果图,直观感受实际调试中的搜线效果:
上图清晰呈现了八邻域搜线在实际优化后图像中的完整追踪效果:程序从图像底部的初始边界点出发,沿着赛道左右两侧边界,一步步向上追踪至图像顶部,形成完整的赛道边界轨迹。结合前文的5×5细节示意图,大家可以快速对应"左边界逆时针、右边界顺时针"的搜索逻辑,调试时若出现搜线偏移、中断等问题,也可对照此图快速排查异常。
调试注意事项(重点提醒):虽然原理易懂,但调试时需重点注意2点,避免出现搜线中断、边界偏移的问题:
-
严格记准搜索方向:左边界逆时针(右→右上角→上面→左上角→左边)、右边界顺时针,方向记错是搜线跑偏的主要原因,可对照5×5细节示意图反复核对;
-
做好断点续接:若遇到赛道边界有轻微断点(如光照影响导致的短暂模糊),可在程序中添加简单的断点续接逻辑,避免程序"摸丢墙",确保搜线连续不中断。
② 最长白列搜线法------逻辑简洁,新手易上手(完整算法详解)
最长白列搜线法的核心逻辑简单易懂,无需复杂的邻域判断,全程步骤清晰、可操作性强,非常适合刚接触摄像头调试的新手,完整算法流程拆解如下,每一步都直白好记,配合演示视频观看,能快速吃透:
第一步:统计每列连续白点个数,生成分布直方数据。操作非常简单,从图像的最下方一列开始,逐列向上寻找白色像素点(二值化后对应赛道区域),同时同步计数;一旦遇到黑色像素点(对应背景区域),就立即停止该列的计数。按照这个方法,遍历完所有列后,我们就能得到每一列连续白点的个数,形成完整的分布直方数据,为后续找边界奠定基础。
第二步:定位左、右最长白列,确定搜索截止行。这一步是算法的核心,具体操作分为两步:一是从图像左侧到右侧,逐列查找连续白点数量最多的一列,即为「左最长白列」;二是从图像右侧到左侧,同样逐列查找连续白点数量最多的一列,即为「右最长白列」。
第三步:精准查找赛道左右边界,处理丢线情况。找到搜索截止行后,我们就可以开始定位赛道边界了,搜索范围固定为「从图像最下一行(对应车辆近处)开始,到搜索截止行结束」,具体边界查找规则如下:
-
左边界查找:以左最长白列为起点,向左逐像素排查,找到「黑黑白」的像素组合(即前两个为黑色、第三个为白色),此时这个白色像素点,就是赛道的左边界;
-
右边界查找:以右最长白列为起点,向右逐像素排查,找到「白黑黑」的像素组合(即前两个为白色、第三个为黑色),此时这个白色像素点,就是赛道的右边界。
补充说明(丢线处理):若沿着上述规则查找,直到扫描到图像的边缘,仍然没有找到对应的「黑黑白」「白黑黑」像素组合,说明出现了丢线情况,此时直接将图像的屏幕边界,当作赛道边界,避免程序因丢线陷入混乱,保证调试稳定性。
为了让大家更直观地掌握整个算法的执行过程,我们还准备了最长白列搜线法的整体流程演示视频,结合视频对照上述步骤,能快速理解每一步的实际操作效果,新手也能快速上手调试。
核心优势(贴合新手需求):相较于八邻域搜线法,最长白列搜线法的最大优势就是门槛低、易操作。算法逻辑清晰连贯,无需记忆复杂的邻域搜索方向,每一步操作都有明确的规则,代码编写难度低;调试过程直观,可通过查看每列白点计数、最长白列位置,快速排查问题,无需复杂的逻辑判断,非常适合新手快速上手、快速落地。
局限性(客观说明,避坑提示):结合实际调试场景,该算法也存在一定局限性,大家可提前了解、规避问题:一是需要遍历整幅图像的所有列,计算耗时相对固定,无法像八邻域搜线法那样节省计算量;二是在简单直道场景下,会存在一定的冗余计算,运行效率低于八邻域搜线法;三是面对复杂弯道时,由于最长白列长度缩短、视野变近,边界识别精度可能会略有下降,需做好调试适配。
**最长白列优化方案(兼顾效率与易用性):针对上述局限性,我们对最长白列搜线法进行了简单易落地的优化,核心是修改第一步的扫描规则,优化后可大幅提升效率,具体如下:
**优化核心(明确两步扫描规则,避免混淆):优化仅针对前两步的扫描逻辑,分两步明确,后续丢线处理等步骤与未优化版本完全一致,无需额外修改:
-
统计白点、找左/右最长白列(第一步):保留"从图像最下方一列开始,逐列向上寻找白点、遇到黑点停止计数"的核心逻辑,扫描规则为隔两列搜一列------即不扫描所有列,每间隔两列,仅对一列进行白点计数,跳过中间两列的扫描,最终定位出左、右最长白列。
-
扫线找边界点(第二步):找到左、右最长白列后,向两边扫线寻找"黑黑白""白黑黑"边界组合时,扫描规则改为隔一列扫一列,且每行都必须完整扫描(不跳过任何一行),确保边界点定位精准,既节省计算量,又不影响识别精度。
优化后实测效果(核心数据):优化后最长白列搜线法的总像素访问量仅为3503次,相较于未优化版本的全列扫描,节省了76%的计算量!,计算耗时大幅降低,冗余计算问题得到有效解决,同时完全不影响边界识别精度,兼顾了新手易用性和调试效率。
为了让大家更直观地体会优化前后的效率差异,我们也准备了对应的演示gif,可清晰看到"隔两列搜一列"的扫描过程,以及优化后像素访问量减少、搜线效率提升的实际效果,结合数据对比,能快速吃透优化逻辑。
两种算法路径对比,助力合理选型(重点:优先推荐八邻域,最长白列可优化适配新手)
结合前文两种算法的原理、实操及调试场景,同时兼顾最长白列搜线法的新增优化方案,我们从算法耗时、资源占用、适配场景 三个核心维度,做详细对比,帮大家快速做出选择------核心结论先明确:从备战调试的效率、稳定性需求出发,优先推荐选择八邻域搜线法;优化后的最长白列搜线法虽大幅提升效率,但仍有局限性,更适合纯新手入门适配,具体对比如下:
| 对比维度 | 八邻域搜线法 | 最长白列搜线法 |
|---|---|---|
| 算法耗时(核心优势) | 耗时少、效率高,无需遍历整幅图像,仅沿赛道边界追踪,计算量可控;搭配下采样、帧间采样优化后,耗时可进一步降低,能有效提升帧率,解决卡顿问题,完全适配备战需求。 | 未优化版本耗时固定且偏长,需遍历整幅图像所有列;优化后(隔两列搜一列),总像素访问量节省80%(仅3358次),计算耗时大幅降低,冗余计算问题得到有效改善,但仍需统计部分列的白点个数,整体效率仍低于八邻域搜线法。 |
| 资源占用(核心优势) | 内存占用低,无需存储整幅图像的冗余信息,仅需记录赛道边界点序列,可有效规避内存不足的报错,与前文大津法的内存优化技巧适配度极高,协同优化效果更突出。 | 未优化版本内存占用略高,需存储所有列的白点计数数据;优化后(隔两列搜一列),需存储的计数数据量同步减少,内存占用有所降低,虽不会出现严重内存溢出,但仍需存储部分直方数据,无法像八邻域那样节省资源,与整体优化思路的协同性较弱。 |
| 适配场景 | 适配性强,无论是直道、复杂弯道,还是光照略有变化的场景,都能精准追踪赛道边界,稳定性高;适合有一定调试基础、追求帧率流畅、想突破卡顿瓶颈的同学,也是备战进阶的最优选择。 | 适配场景有限,优化后虽能提升效率,但识别精度未明显提升,仍更适合简单直道场景,面对复杂弯道时,识别精度会下降;仅推荐纯新手入门练习使用,借助优化版本快速熟悉搜线逻辑,入门后建议快速切换为八邻域搜线法,避免影响后续备战进度。 |
| 实操难度 | 略高于最长白列,需记准左逆右顺的搜索方向,调试时需注意断点续接,但掌握后可快速落地,后续调试维护更便捷。 | 极低,逻辑简洁、步骤固定,优化后仅修改第一步扫描规则(隔两列搜一列),无需复杂的方向判断,无需额外新增操作,适合纯新手入门,快速熟悉搜线算法的基本逻辑。 |
补充选型建议:结合备战核心需求(解决卡顿、提升帧率、稳定识别),优先选择八邻域搜线法 ,其在耗时和资源上的优势能与前文大津法的优化技巧形成协同,彻底解决调试中的核心痛点;若你是纯新手,可借助优化后的最长白列搜线法入门(效率提升、操作简单),快速熟悉搜线逻辑,待掌握基础调试技巧后,建议及时切换为八邻域搜线法,兼顾入门难度与备战效率,避免因算法选型不当影响进度。
龙邱寄语
STC摄像头组的帧率优化,核心在于精准定位痛点、科学简化计算,无需追求过度复杂的操作,抓住"内存优化""计算量精简"两个关键,就能实现显著的优化效果。
以上优化思路及基础知识点,均基于龙邱科技多次实测及同学们的备战高频痛点总结得出,从基础原理铺垫,到大津法双重优化,再到搜线算法选型,每一步均贴合实际备战场景,兼顾实用性与严谨性,助力大家少踩坑、省时间。
希望这份指南能帮助各位同学突破调试瓶颈,高效解决帧率卡顿问题,稳步推进备战进度。若大家在调试过程中遇到其他疑问,欢迎在评论区留言交流,龙邱科技将持续为各位同学提供技术支持,助力大家顺利备战、突破难关!
(注:个人观点,仅供参考)