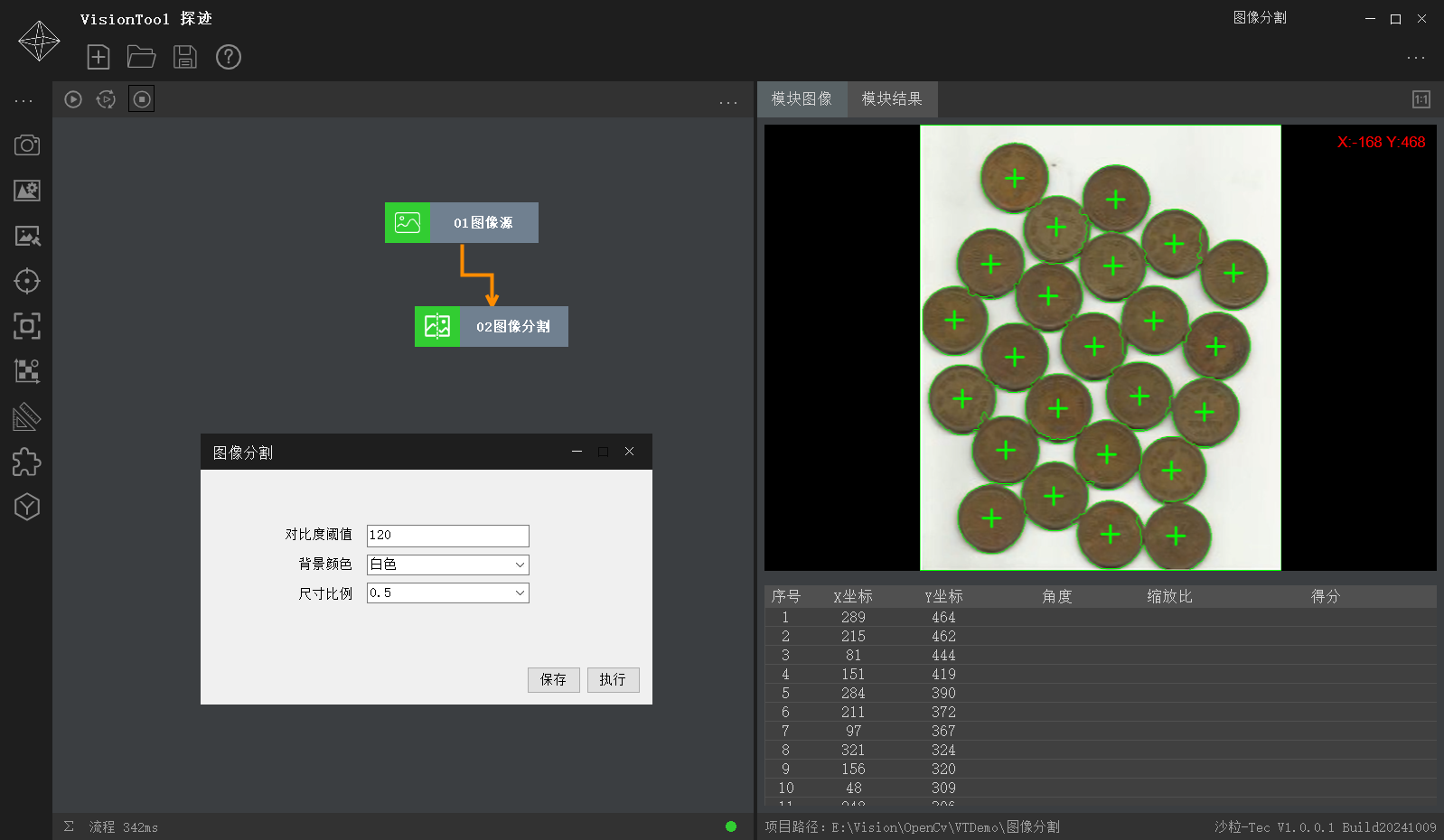
C# 基于OpenCv的视觉工作流-章27-图像分割
本章目标:
一、理论概念;
二、图像处理;
三、设置背景图;
四、设置前景图;
五、计算边缘图;
六、构建标识图;
七、图像分割;
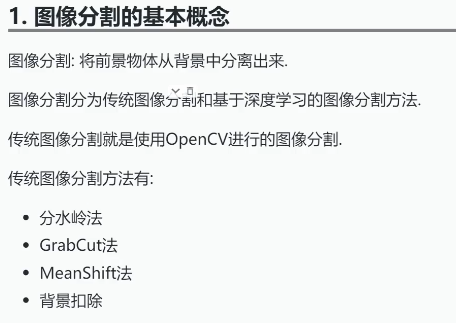
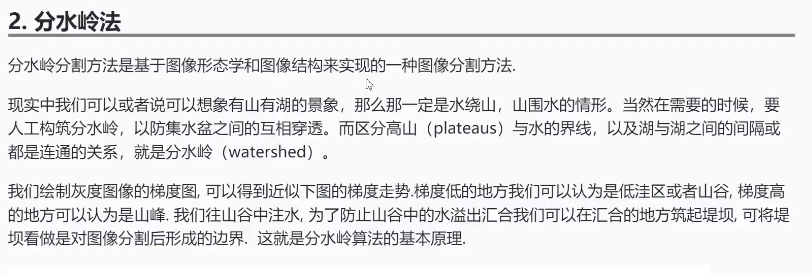
一、理论概念;
详细见文末链接
二、图像处理;
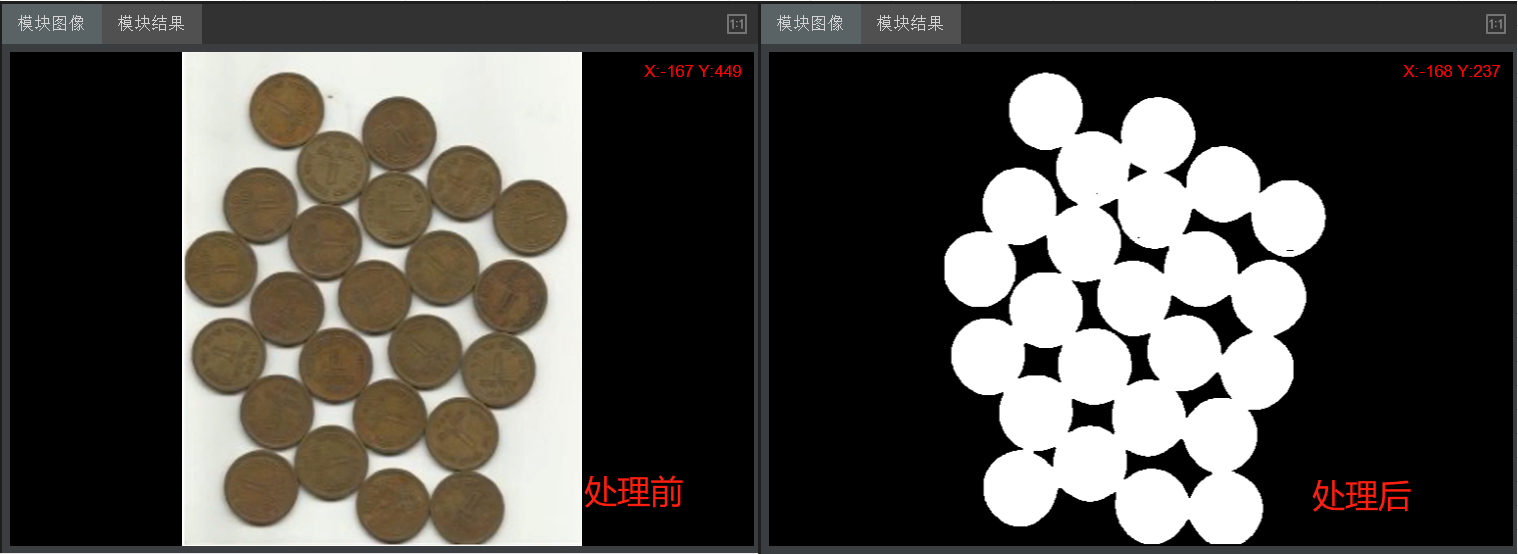
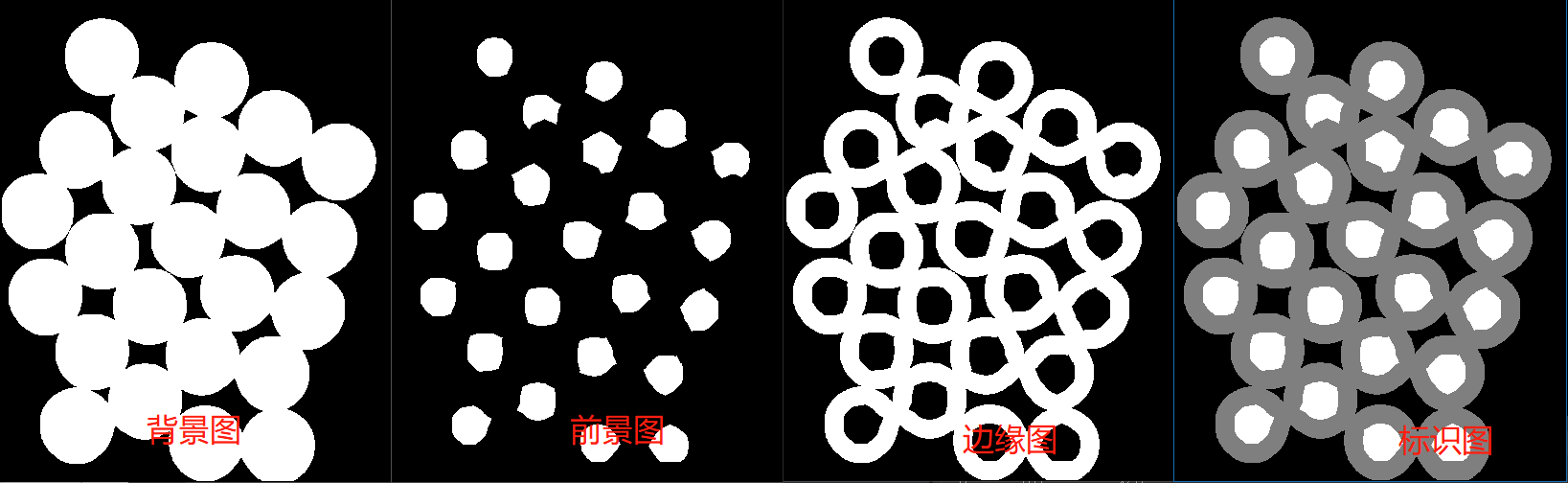
对图像进行转灰度图、二值化、开运算去毛刺处理(前文章有介绍,不再描述),得到目标为白色,其它为黑色的图像,如下图所示。
三、设置背景图;
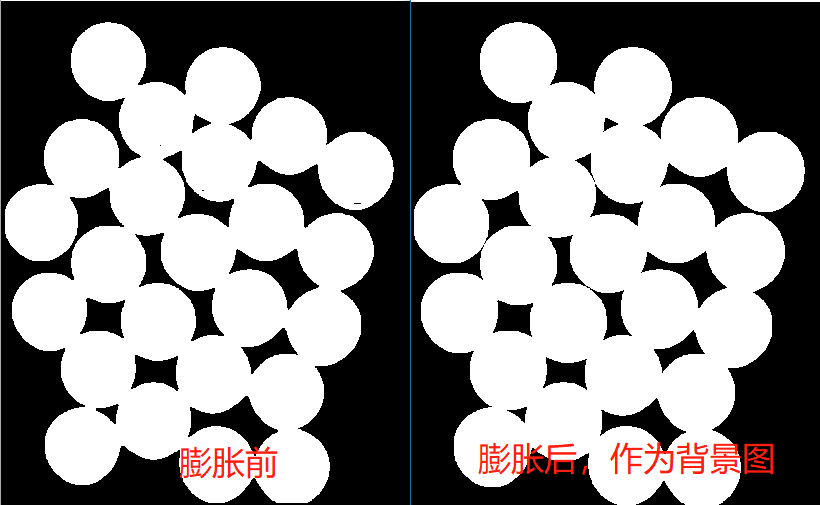
将处理后的图像进行膨胀运算(前文章有介绍,不再描述),再将所得图像作为背景图,用于后续运算,如下图所示。
膨胀的目的是为了取得更多的边缘地带区域,利于后续计算边缘。
四、设置前景图;
设置前景图可用腐蚀操作取图,但由于各区域相连部分较多,难以很好的用腐蚀取得。
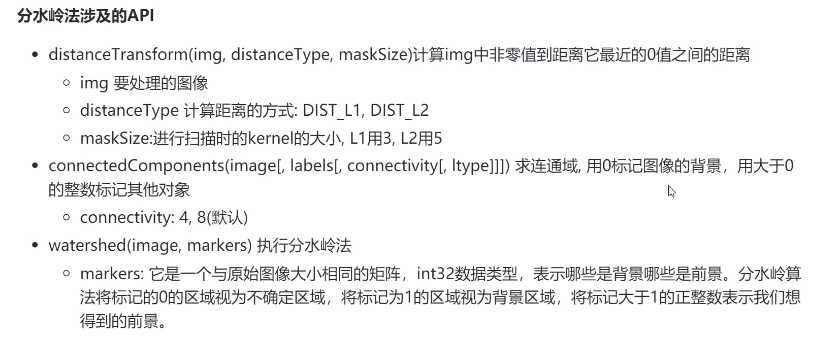
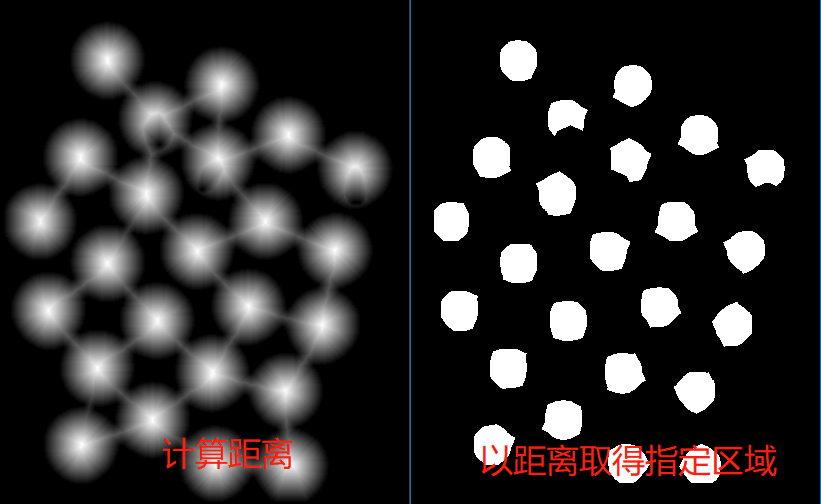
本文用DistanceTransform算子进行配合获取。该算子能计算出非0值到0值的距离,对所得距离进行自由设定可获得相应图像区域。
1.计算距离
OpenCv 可如下使用
Mat matDistance = new Mat();
Cv2.DistanceTransform(matDst,matDistance,DistanceTypes.L2,DistanceTransformMasks.Mask3);
其中:参数1,为输入图像;
参数2,为输出图像;
参数3,为计算的距离方式;
参数4,为核大小;
2.取得最大最小距离值
Cv2.MinMaxIdx(matDistance, out double min, out double max);
其中:参数1,为输入图像;
参数2,为最小距离;
参数3,为最大距离;
3.取得前景图
Mat thresholdFG = new Mat();
Cv2.Threshold(matDistance, thresholdFG, scale * max, 255, ThresholdTypes.Binary);
其中:参数1,为输入图像;
参数2,为输出图像;
参数3,为距离值,此处按指定比例取值;
参数4,为最大值;
参数5,为二值化类型;
效果如下
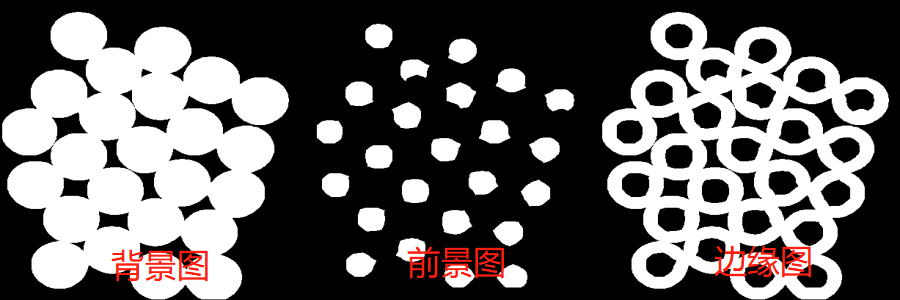
五、计算边缘图;
原理:边缘图=背景图-前景图
六、构建标识图;
上述步骤后,图像的前景、前景、边缘均已取得,但三图中所有的像素值均为0或255。
分水岭算法要求的是边缘区为0值,背景区为1值,前景区为大于1值。
所以需要对图像像素值时行转换,以符合分水岭算法要求,OpenCv可用算子ConnectedComponents进行相应转换。
OpenCv 算子ConnectedComponents可如下使用
Mat markers = new Mat();
Cv2.ConnectedComponents(fg, markers);
其中:参数1,为输入图像;
参数2,为输出标识;
由于ConnectedComponents算子用0标记背景,用大于0的整数标记前景,仍不满足要求,
所以需遍历markers ,将0值加1,即满足分水岭背景区要求;
将大于0值也加1,满足分水岭前景区要求;
剩下的边缘区将值改为0,即满足分水岭边缘区要求。
标识结果,如下图
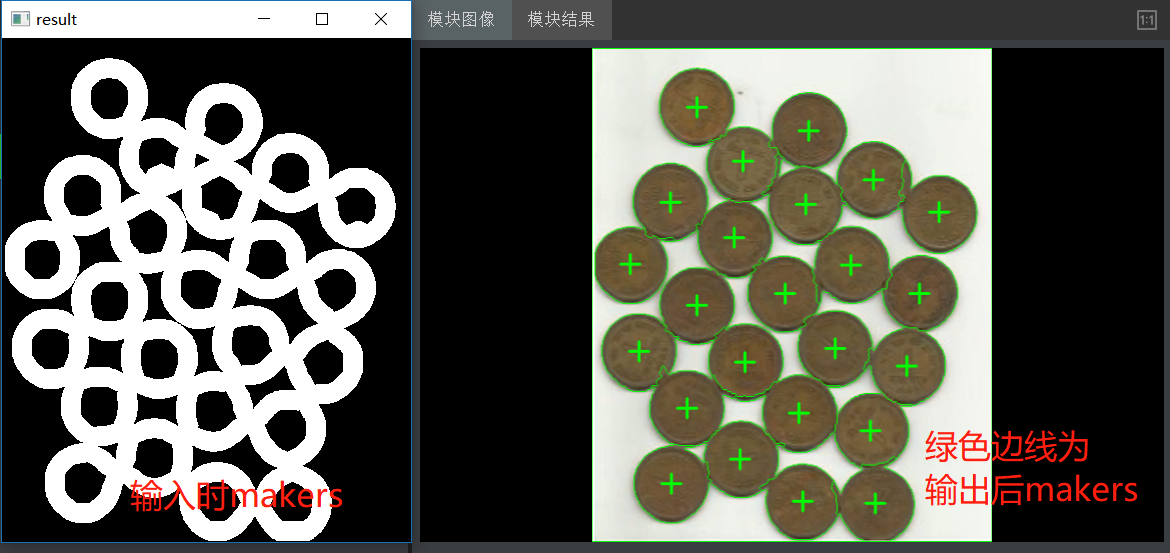
七、图像分割;
OpenCv 算子Watershed可如下使用
Cv2.Watershed(src, markers);
其中:参数1,为输入图像;
参数2,为输入输出标识;
说明:输入的markers中,边缘区是粗放的不精确的,通过分水岭算法后,输出的markers边缘得到进一步精确,效果如下图。
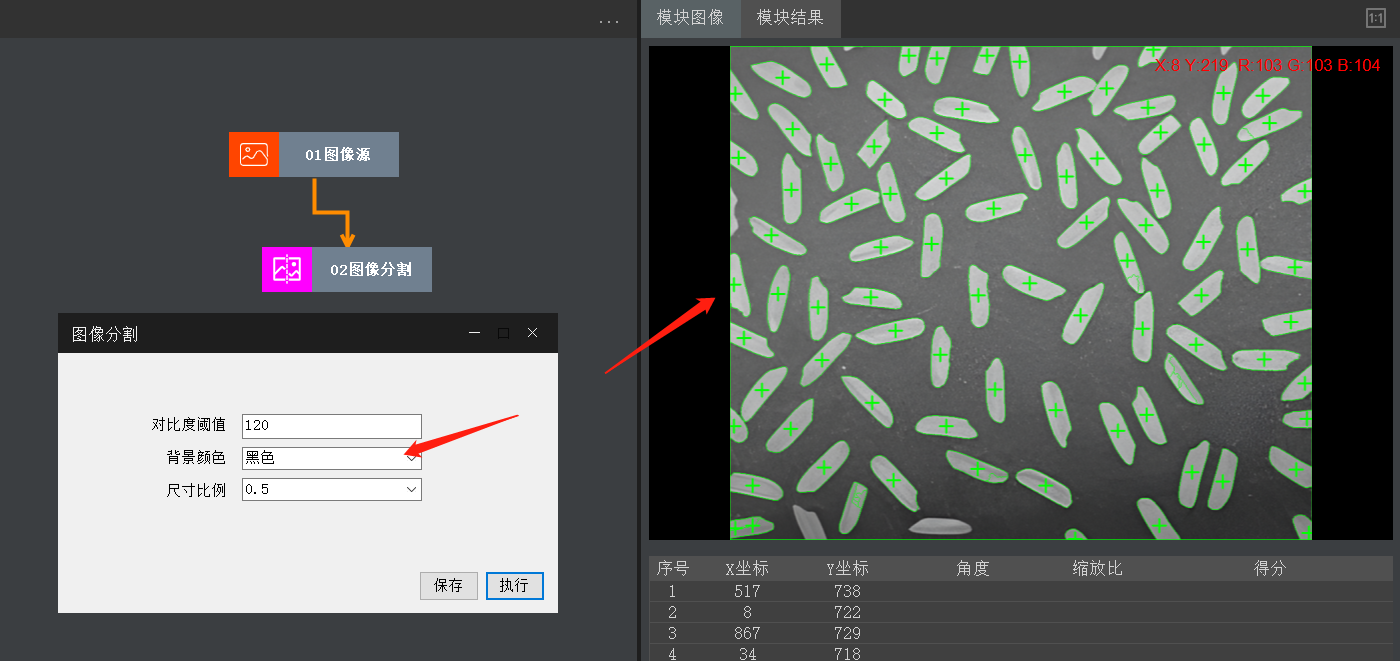
对黑色背景的分割,如图
参考链接
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
版本已更新为V1.0.0.1,更新内容如下:
1.执行流程,仅首次调IO读取参数、
2.流程及节点间数据隔离;
"VisionTool Halcon"付费视觉工具
下载地址:https://pan.baidu.com/s/1v832KTonDYS6oNnWG2iZtQ?
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!