在开放复杂的物理环境中稳定运行,机器人需要能够理解环境的动态演化以及自身行动可能带来的结果。在这一演进过程中,世界模型逐渐成为连接高层智能与底层执行的关键基础设施,为机器人在真实物理世界中实现可靠的感知、决策与行动闭环提供支撑。
NVIDIA Cosmos:
++面向物理 AI 的世界基础模型++
NVIDIA Cosmos 包含一系列先进的预训练多模态模型,为开发者构建虚拟世界、实现智能推理,提供了一套灵活、可扩展的世界建模基础设施。
在 Cosmos 平台中,Cosmos Predict 是面向世界状态预测的核心基础模型,通过视频级生成与预测,Cosmos Predict 使物理 AI 系统能够在给定当前观测和条件的情况下,对未来状态进行推演。
智元机器人 Genie Envisioner:
++基于 Cosmos 实现感知到行动的端到端闭环++
GE 以统一的视频生成式世界模型为核心,将策略学习、评估与仿真能力整合在同一框架之中。在 GE 的整体架构中,GE-Sim 模块承担着视频级世界仿真的关键角色。该模块需要在多视角条件下生成具备物理一致性和时间稳定性的环境演化结果,同时还必须对机器人的动作指令做出准确响应。
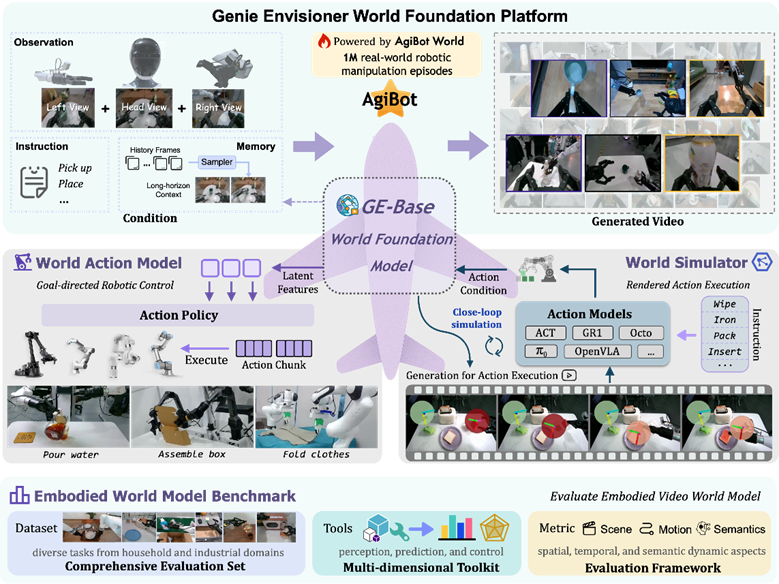
具身智能世界模型平台 Genie Envisioner(GE)
*图片来源于 Genie Envisioner 项目网站
NVIDIA Cosmos Predict 2,
++加速 GE-Sim 迭代升级++
智元机器人通过将 Cosmos Predict 2 深度集成至自研的动作条件世界模型架构中,为 GE-Sim 提供强大的通用视觉与物理先验能力。同时,结合 AgiBot World 数据集开展针对性的后训练,显著加快了 GE-Sim 的迭代节奏,并持续提升仿真质量与系统稳定性。
基于 NVIDIA Cosmos 的 GE-Sim 视频仿真
基于 NVIDIA Cosmos 的 GE-Sim 视频仿真演示:模型根据机器人动作指令生成未来帧,并在多视角下保持高度一致性
更多资源
想要了解更多信息,请关注 NVIDIA Cosmos 开发者资源,并加入我们的开发者社区:
-
阅读 Genie Envisioner 研究论文:
-
了解 Genie Envisioner 开源项目详情:
-
阅读 Cosmos Cookbook:
-
了解模型及数据集:
-
在我们的托管模型库中试用 Cosmos 模型:
-
加入 Cosmos 开发者社区: