在PLC编程领域,置位复位(Set/Reset)功能块是实现逻辑控制的核心元件。尤其在CODESYS环境中,除了RS/SR触发器、边缘检测等功能块外,单一的置位(SET)和复位(RESET)指令也是高频使用的基础指令,二者灵活搭配运用,直接决定了控制程序的稳定性和可读性。本文将从功能块/指令原理入手,结合电机控制、模式选择、故障检测等工业现场实际场景,详解置位复位功能块与指令的应用技巧,帮助工控工程师构建规范、可靠的PLC控制程序。
一、置位复位核心元件:功能块 vs 单一指令
CODESYS中实现置位复位逻辑主要有两类核心元件:RS/SR触发器功能块 和单一置位/复位指令,二者原理相通但适用场景不同,先明确核心概念才能精准选型。
1. 核心触发器类型(功能块形式)
两类触发器的核心差异在于"优先级",这直接决定了置位(S)和复位(R)信号同时触发时的输出结果,也是选型的关键依据:
|-------------|------|------------------------------|-----------------------|
| 触发器类型 | 优先级 | 核心逻辑 | 典型应用场景 |
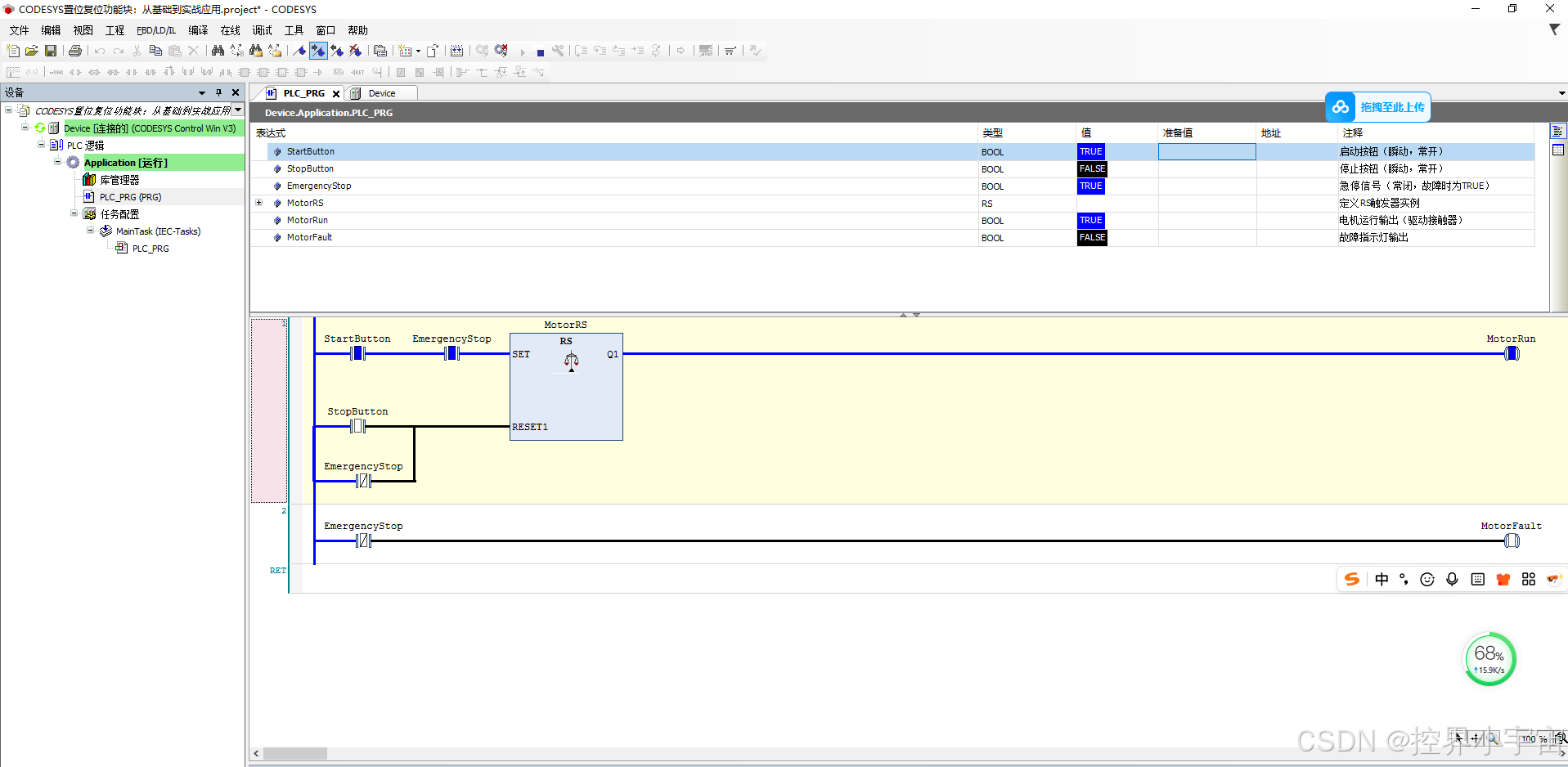
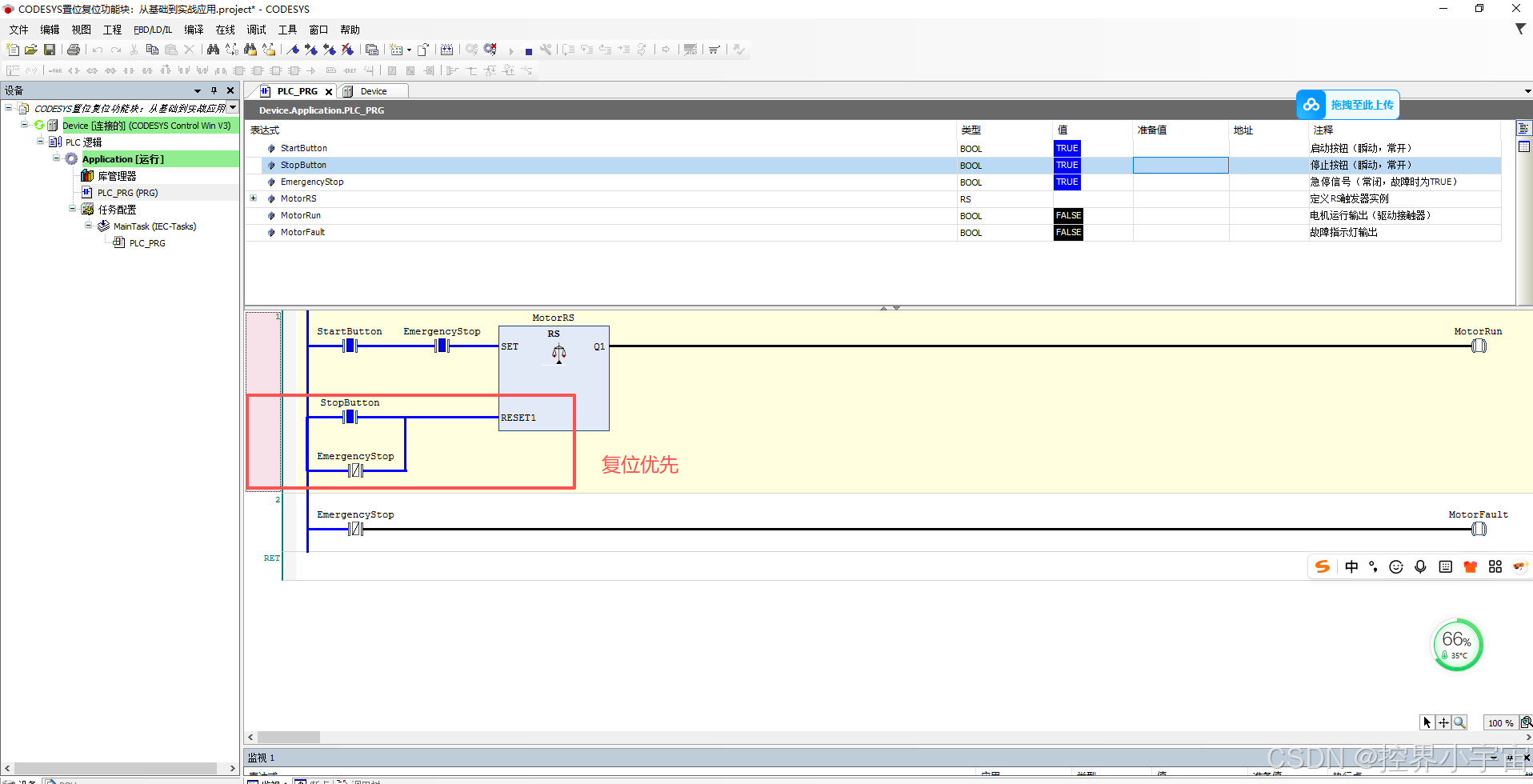
| RS触发器(复位优先) | 复位优先 | 置位(S)和复位(R)同时为TRUE时,输出为FALSE | 急停优先的设备控制(如电机启停、安全回路) |
| SR触发器(置位优先) | 置位优先 | 置位(S)和复位(R)同时为TRUE时,输出为TRUE | 模式选择、流程激活、优先级控制等场景 |
2. 单一置位/复位指令(指令形式)
除了功能块,CODESYS还提供独立的置位(SET)和复位(RESET)指令,直接对BOOL变量进行状态锁定,语法更简洁,适合简单的单条件置复位场景:
|-------------|----------------|---------------------------------|-----------------------|
| 指令类型 | 语法格式 | 核心逻辑 | 典型应用场景 |
| 置位指令(SET) | SET <变量名>; | 执行指令时,将变量强制设为TRUE并保持,直到被复位指令触发 | 单次触发的状态锁定(如报警触发、模式激活) |
| 复位指令(RESET) | RESET <变量名>; | 执行指令时,将变量强制设为FALSE并保持,直到被置位指令触发 | 状态清除(如报警复位、手动停止) |
3. 边缘检测辅助元件
边缘检测元件用于捕捉信号的"瞬间变化",是连接"瞬动按钮"和"持续状态"的桥梁,无论使用功能块还是单一指令,都常搭配边缘检测使用:
- R_TRIG(上升沿检测):仅在信号从FALSE变为TRUE的瞬间输出一个扫描周期的TRUE,用于捕捉按钮按下、状态切换等瞬动信号。
- F_TRIG(下降沿检测):仅在信号从TRUE变为FALSE的瞬间输出一个扫描周期的TRUE,用于捕捉按钮松开、状态退出等动作。
二、基础应用案例:功能块 vs 单一指令对比
案例1:电机启停控制(RS触发器 vs 单一置复位指令)
电机控制核心需求是「启动按钮瞬动触发运行,停止/急停按钮优先复位」,我们分别用RS触发器和单一置复位指令实现,对比差异。
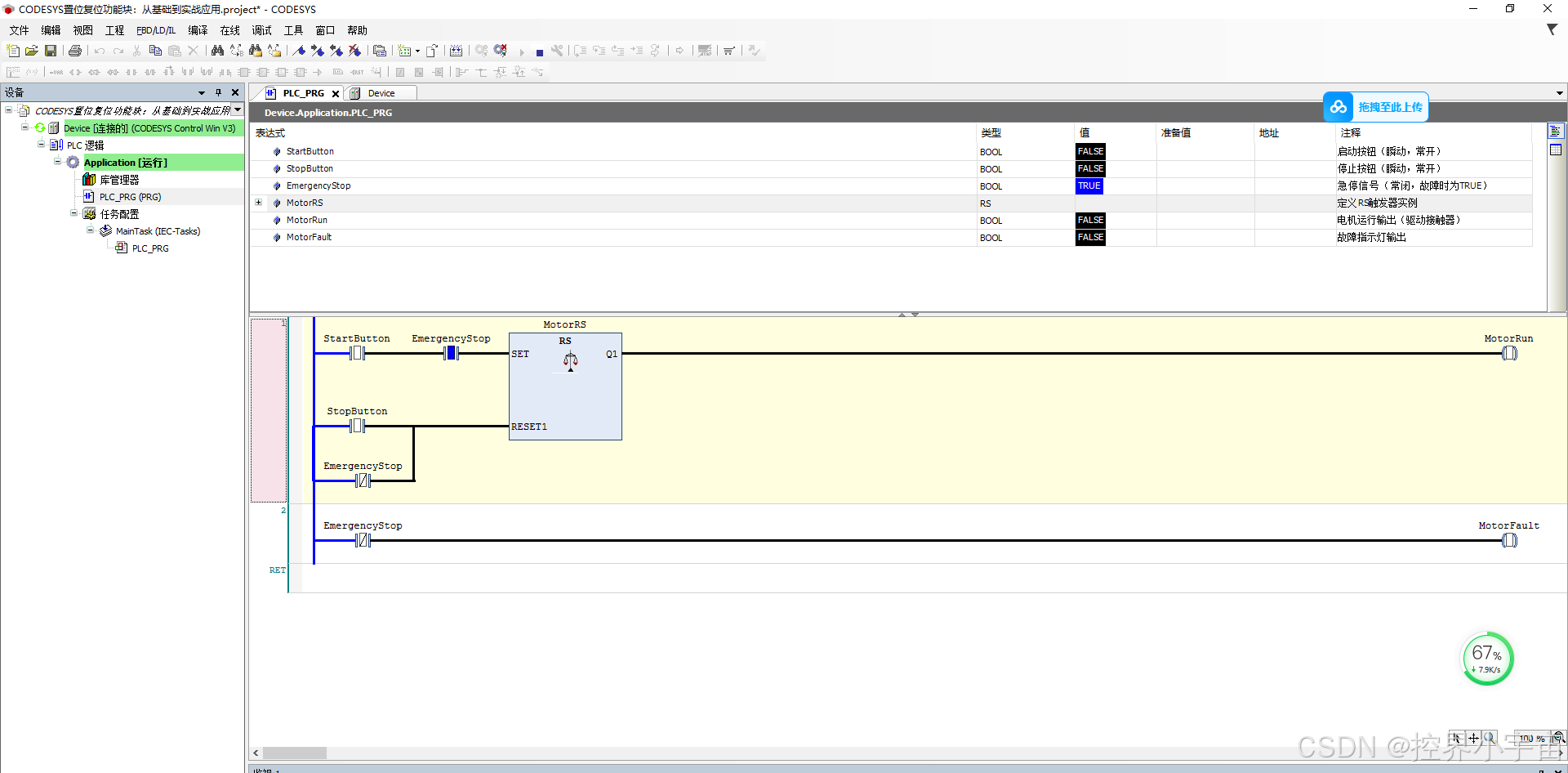
方式1:RS触发器实现(复位优先,安全合规)
|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| 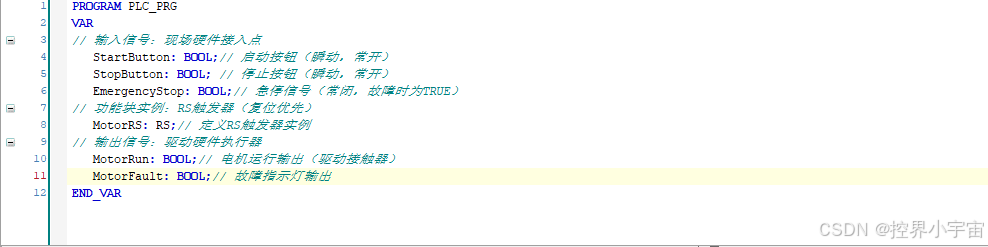 // 核心逻辑:急停信号优先复位 // 输出映射:触发器输出赋值给电机运行信号
// 核心逻辑:急停信号优先复位 // 输出映射:触发器输出赋值给电机运行信号  // 故障指示:急停触发时点亮故障灯
// 故障指示:急停触发时点亮故障灯 |
|
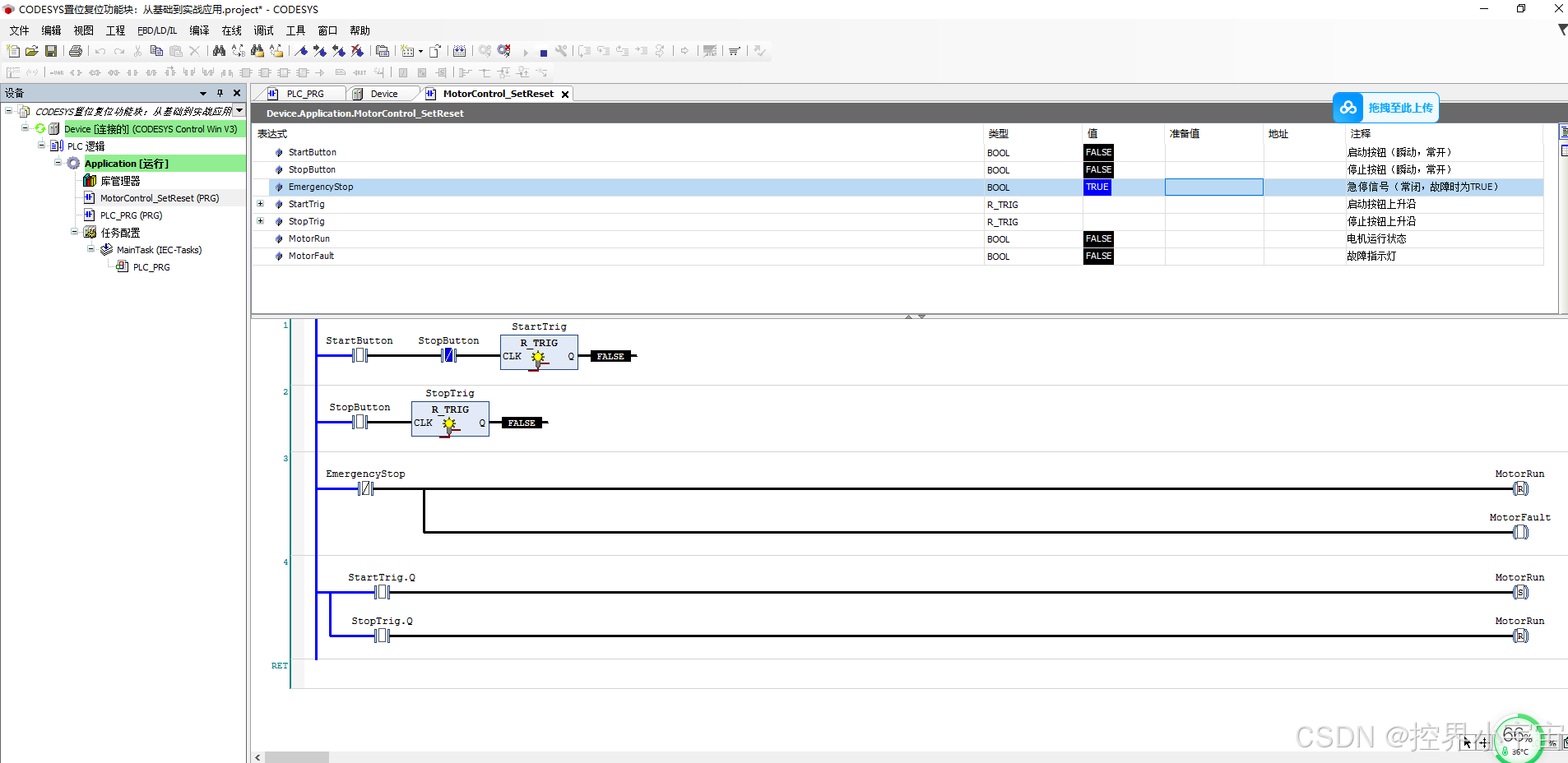
测试:
方式2:单一置复位指令实现
|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| PROGRAM MotorControl_SetReset 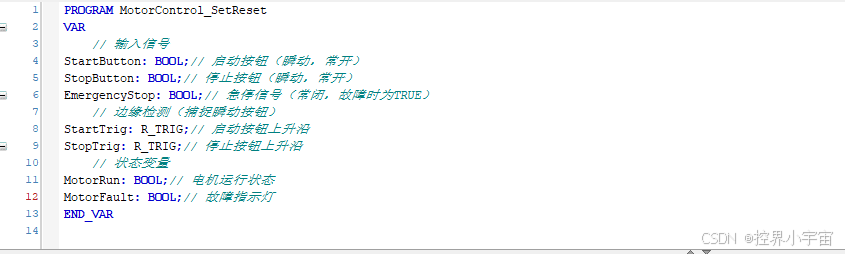 // 边缘检测:捕捉按钮瞬动信号
// 边缘检测:捕捉按钮瞬动信号  // 核心逻辑:置复位指令实现状态锁定 // 急停优先:急停触发时直接复位
// 核心逻辑:置复位指令实现状态锁定 // 急停优先:急停触发时直接复位  // 启动按钮上升沿:置位电机运行
// 启动按钮上升沿:置位电机运行  |
|
关键对比说明:
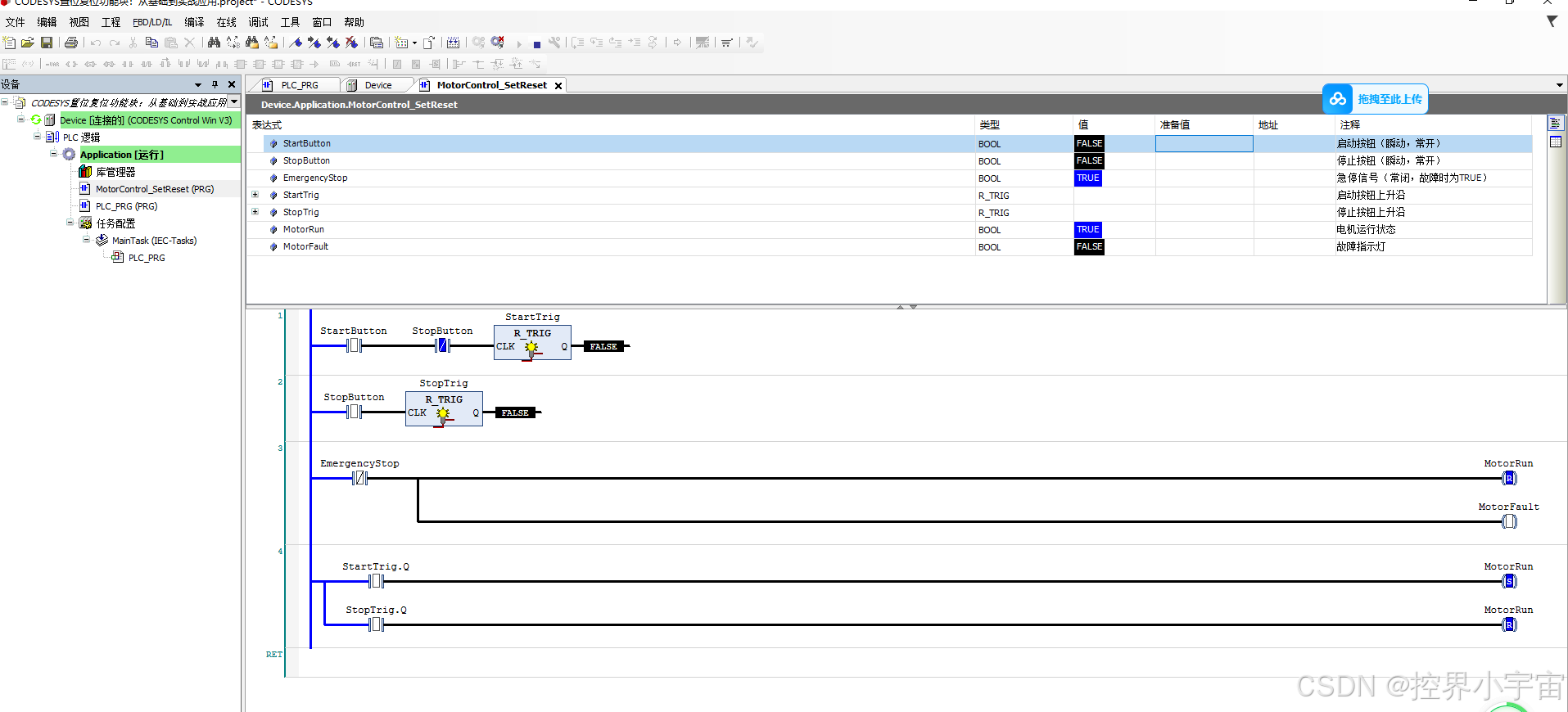
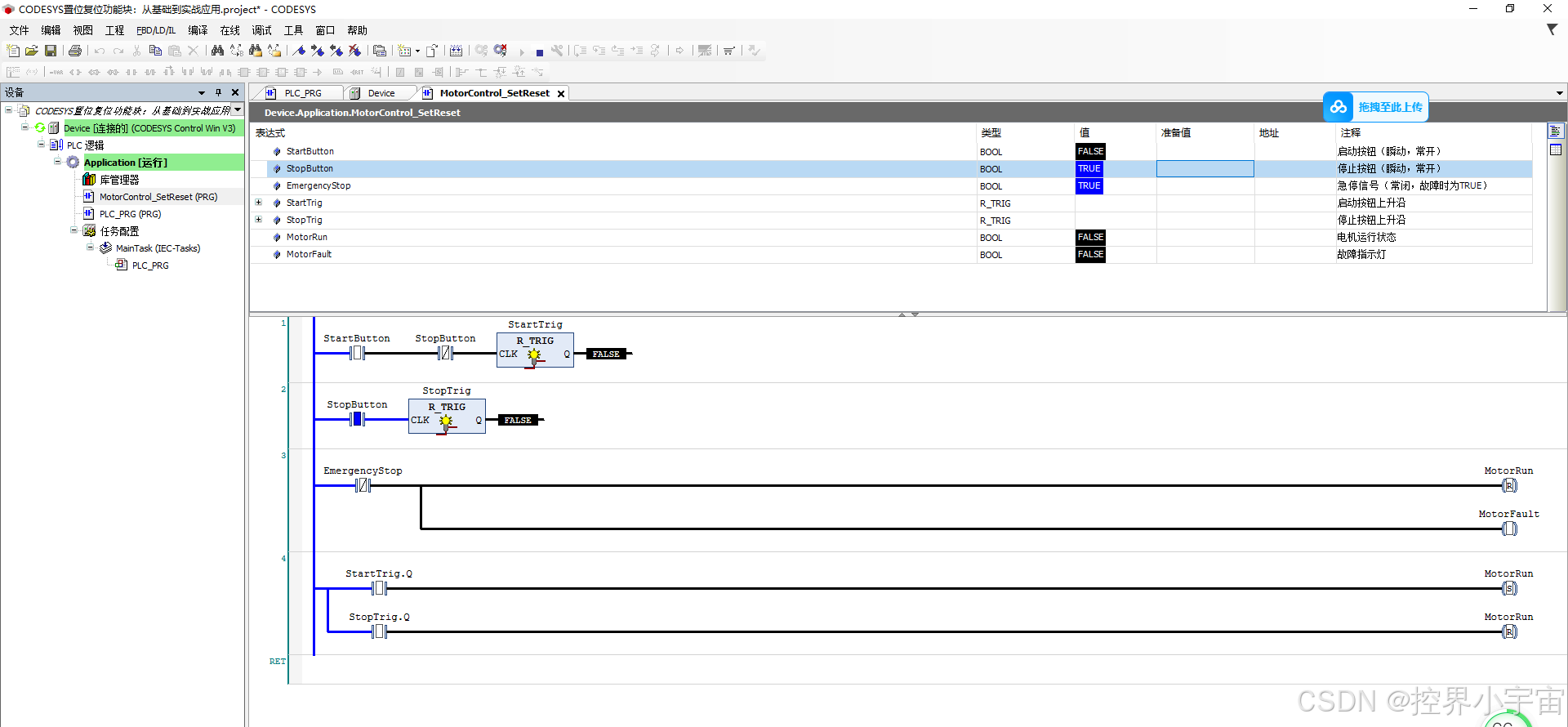
- RS触发器:适合安全优先场景,内置"复位优先"逻辑,无需额外判断,符合工业安全规范,代码可读性更高;
- 单一置复位指令:语法更简洁,适合简单的单条件置复位场景,但需手动处理优先级(如急停优先),代码量略多;
- 核心共性:都需要搭配边缘检测(R_TRIG)捕捉瞬动按钮,避免按钮持续按下导致逻辑异常。