01. 引言:如果不看路,车要怎么开?
如果把工业控制比作驾驶汽车,那么:
- PID 控制 就像是只看后视镜开车。它只能根据已经发生的偏差(车偏离了车道)来拼命打方向盘修正。
- MPC 控制 则是看着挡风玻璃开车。它不仅知道当前的偏差,更预知了前方 100 米的弯道,从而提前轻打方向,实现顺滑过弯。
在自动化控制领域,MPC(Model Predictive Control) 被誉为现代控制理论的"皇冠明珠"。它凭借对未来的"预知"能力,在处理复杂约束和多变量耦合时展现出降维打击般的优势。
02. MPC 的灵魂:滚动时域机制 (Receding Horizon)
MPC 与传统最优控制(Optimal Control)最大的区别在于 "滚动" 二字。它不是一次性算完整个行程,而是步步为营、动态规划。
其核心逻辑可以概括为三步循环:
- 预测 (Predict): 利用系统模型(如状态空间方程),基于当前状态x(k)x(k)x(k) ,预测未来NpN_pNp 步(预测时域)的系统行为。它在思考:"如果我施加不同的控制量序列,系统会产生怎样的演变?"
- 优化 (Optimize): 这是 MPC 的计算核心。在满足所有硬约束(如阀门开度、最大流量、安全压力边界)的前提下,求解一个二次规划(QP)问题。
- 目标: 找到未来NcN_cNc 步(控制时域)的最优控制序列 u(k),u(k+1)...u(k), u(k+1) \dotsu(k),u(k+1)...
- 权衡: 既要跟踪误差最小,又要控制动作平稳(省能且保护硬件)。
- 实施 (Act): 虽然算出了未来一连串的控制动作,但只执行第一步 u(k)u(k)u(k) 。
为什么只执行第一步?
因为模型永远存在误差,环境永远有干扰。到了下一时刻k+1k+1k+1,系统会根据最新的测量反馈(Feedback)作为新起点重新规划。这种"预测+修正"的机制,赋予了 MPC 极强的鲁棒性。
03. 深入数学内核:代价函数与约束
MPC 之所以能处理 PID 搞不定的多变量耦合(MIMO),全靠数学上的二次规划(Quadratic Programming)。
3.1 代价函数JJJ
一个典型的增量式 MPC 代价函数通常定义为:

这行公式详细内容如下:
- 第一项(跟踪性能): 输出 yyy 与参考值 rrr 的差距。权重矩阵 QQQ 越大,系统响应越快,但也越容易超调。
- 第二项(控制能量): 控制增量 Δu\Delta uΔu 的大小。权重矩阵 RRR 越大,控制器越"佛系",动作越柔和,执行器磨损越小。
调参本质: PID 调的是 Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd;而 MPC 调的是权重矩阵 QQQ 与 RRR 的比例。
3.2 显式约束
PID 遇到执行器饱和(如阀门全开)时,容易出现积分饱和(Integral Windup) 。而 MPC 将约束直接写进优化问题:

04. 为什么 PID 仍是主流?MPC 的挑战
如果说 PID 是 AK-47(便宜、耐造),那 MPC 就是精确制导导弹(精准、昂贵)。
MPC 落地面临三座大山:
- 算力消耗 (Computational Burden): PID 只需要几次加减乘除;MPC 则需要在毫秒级时间内求解大型矩阵优化。对于高频动态系统(如无人机电机),对芯片算力挑战巨大。
- 建模难度 (Modeling): "Model" 是 MPC 的基石。如果系统辨识不准,预测就是错的。"Garbage In, Garbage Out" 在 MPC 上体现得淋漓尽致。
- 实时性风险: 如果求解器(Solver)在采样时间内没算出来怎么办?这在自动驾驶中是致命的。
05. 行业案例:MPC 在哪大显身手?
- 自动驾驶(轨迹跟踪): 变道时同时考虑偏差、朝向、侧向加速度及道路边界,走出最优曲线。
- 流程工业(石油化工): 如精馏塔控制,10 进 10 出且强耦合。MPC 无需复杂的解耦网络,直接通过模型自动解耦。
- 机器人(动态平衡): 机器狗在复杂地形行走时,MPC 以几百赫兹频率预测质心位置,计算每一步的落脚点。
06. 结语
MPC 的本质,是用算力换性能 ,用模型换智能。
对于简单的液位控制,PID 绰绰有余;但在多变量、强约束、高价值的场景下,MPC 是唯一能逼近物理极限的控制方案。随着边缘计算算力的提升,MPC 正在从"贵族控制"走向电机驱动、无人机甚至电源管理等更广阔的舞台。
理论讲完了,如何用 Python 手撸一个更完善的 MPC 控制器?下期我们将引入
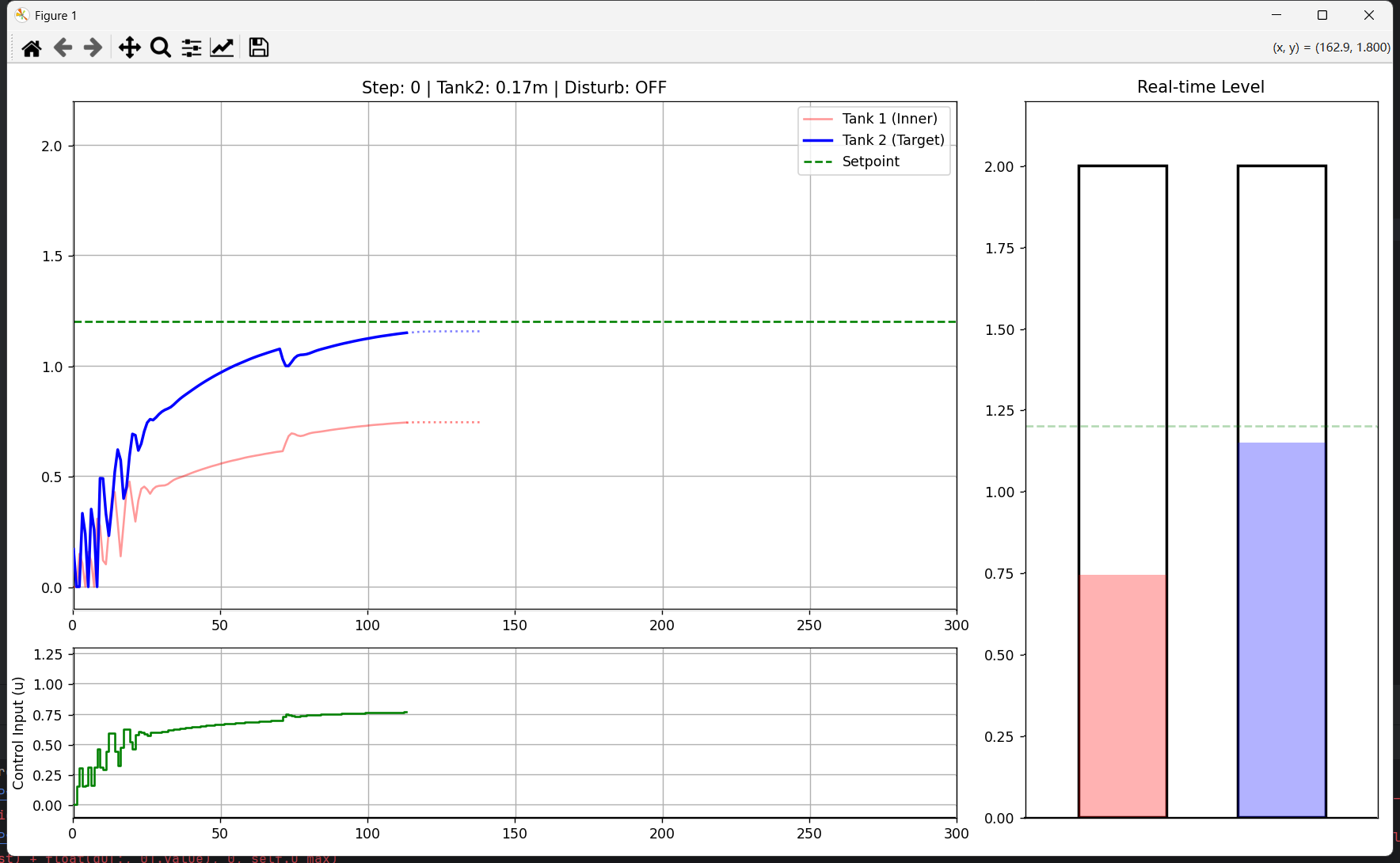
cvxpy求解器,模拟一个真实的双容水箱控制系统。