(以下内容全部出自上述课程)
目录
- 图
-
- [1. 基本概念](#1. 基本概念)
-
- [1.1 定义](#1.1 定义)
- [1.2 应用](#1.2 应用)
- [1.3 普通图](#1.3 普通图)
- [1.4 顶点相关](#1.4 顶点相关)
- [1.5 (强)连通分量](#1.5 (强)连通分量)
- [1.6 生成树/森林](#1.6 生成树/森林)
- [1.7 边的权](#1.7 边的权)
- [2. 特殊的图](#2. 特殊的图)
- [3. 小结](#3. 小结)
- 图的存储
-
- [1. 邻接矩阵](#1. 邻接矩阵)
-
- [1.1 概念](#1.1 概念)
- [1.2 带权图](#1.2 带权图)
- [1.3 性能分析](#1.3 性能分析)
- [1.4 性质](#1.4 性质)
- [1.5 小结](#1.5 小结)
- [2. 邻接表](#2. 邻接表)
-
- [2.1 概念](#2.1 概念)
- [2.2 小结](#2.2 小结)
- [3. 十字链表法](#3. 十字链表法)
- [4. 邻接多重表](#4. 邻接多重表)
- 图的基本操作
-
- [1. Adjavent-->边存在](#1. Adjavent-->边存在)
- [2. Neighbors-->邻接边](#2. Neighbors-->邻接边)
- [3. InsertVertex-->插入点](#3. InsertVertex-->插入点)
- [4. DeleteVertex-->删除点](#4. DeleteVertex-->删除点)
- [5. RemoveEdge-->删除边](#5. RemoveEdge-->删除边)
- [6. FirstNeighbor-->第一个邻接点](#6. FirstNeighbor-->第一个邻接点)
- [7. NextNeighbor-->下一个邻接点](#7. NextNeighbor-->下一个邻接点)
- [8. 获取/设置权值](#8. 获取/设置权值)
- 图的遍历
-
- [1. 广度优先遍历(BFS)](#1. 广度优先遍历(BFS))
-
- [1.1 与树的广度优先遍历之间的联系](#1.1 与树的广度优先遍历之间的联系)
- [1.2 代码实现](#1.2 代码实现)
- [1.3 遍历序列](#1.3 遍历序列)
- [1.4 最终实现](#1.4 最终实现)
- [1.5 复杂度分析](#1.5 复杂度分析)
- [1.6 广度优先生成树](#1.6 广度优先生成树)
- [1.7 小结](#1.7 小结)
- [2. 深度优先遍历(DFS)](#2. 深度优先遍历(DFS))
-
- [2.1 概念](#2.1 概念)
- [2.2 最终实现](#2.2 最终实现)
- [2.3 复杂度分析](#2.3 复杂度分析)
- [2.4 遍历序列](#2.4 遍历序列)
- [2.5 深度优先生成树](#2.5 深度优先生成树)
- [2.6 图的遍历与图的连通性](#2.6 图的遍历与图的连通性)
- [2.7 小结](#2.7 小结)
图
1. 基本概念
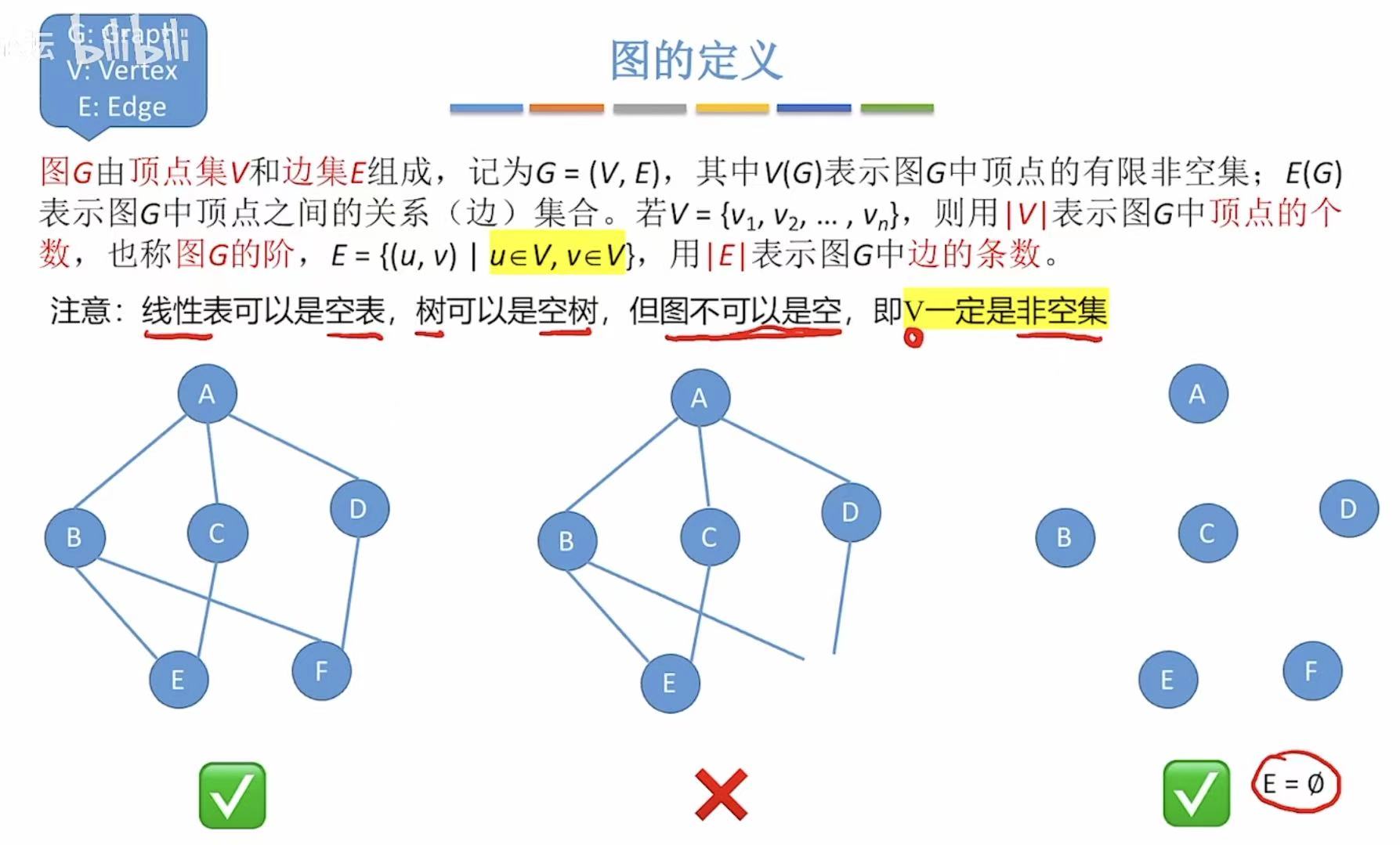
1.1 定义
- 图:G 顶点+边
- 顶点:V |V|-->顶点个数
- 边:E |E|-->边的个数
- 图可以没有边,但一定不能没有顶点。
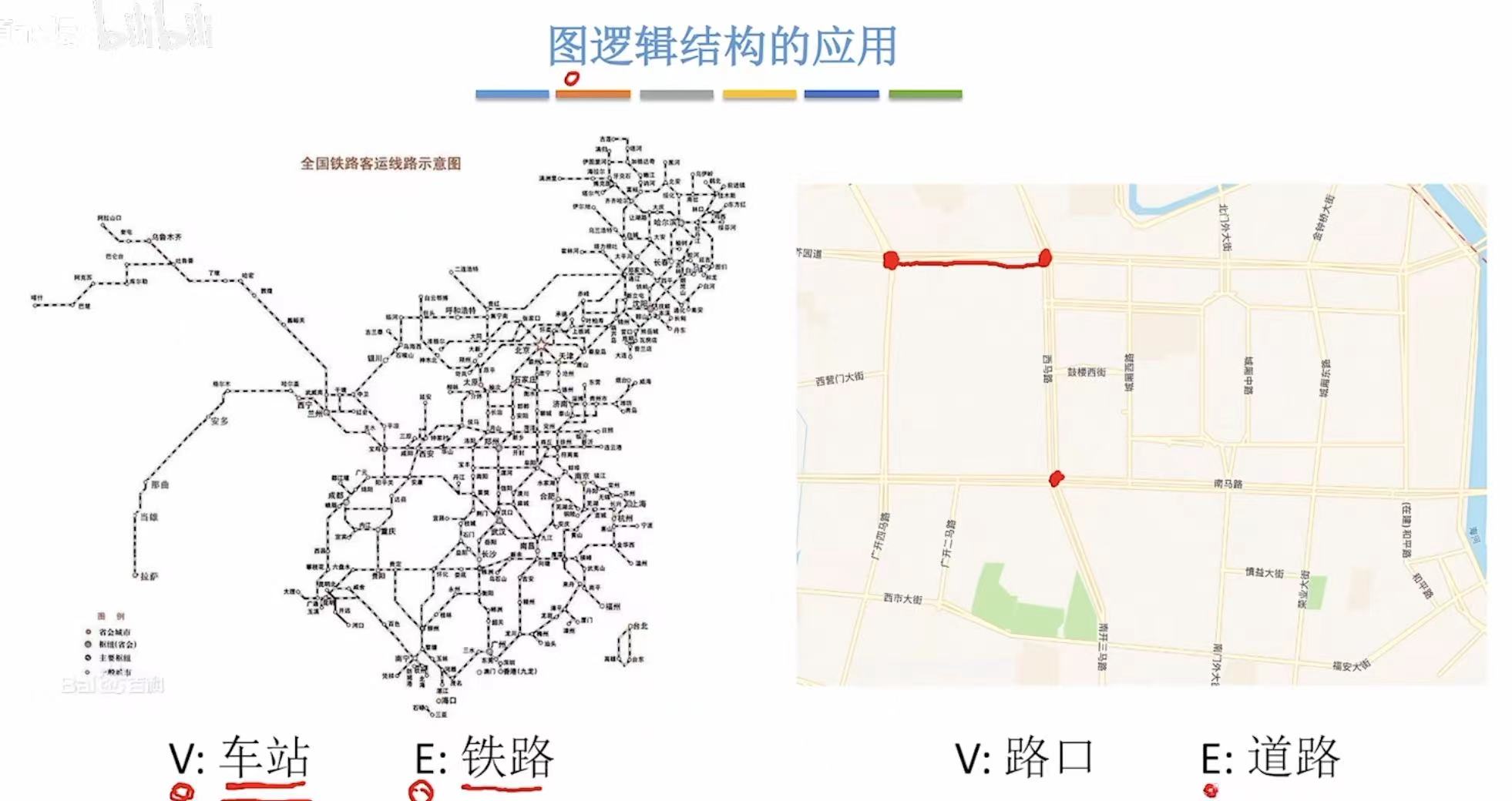
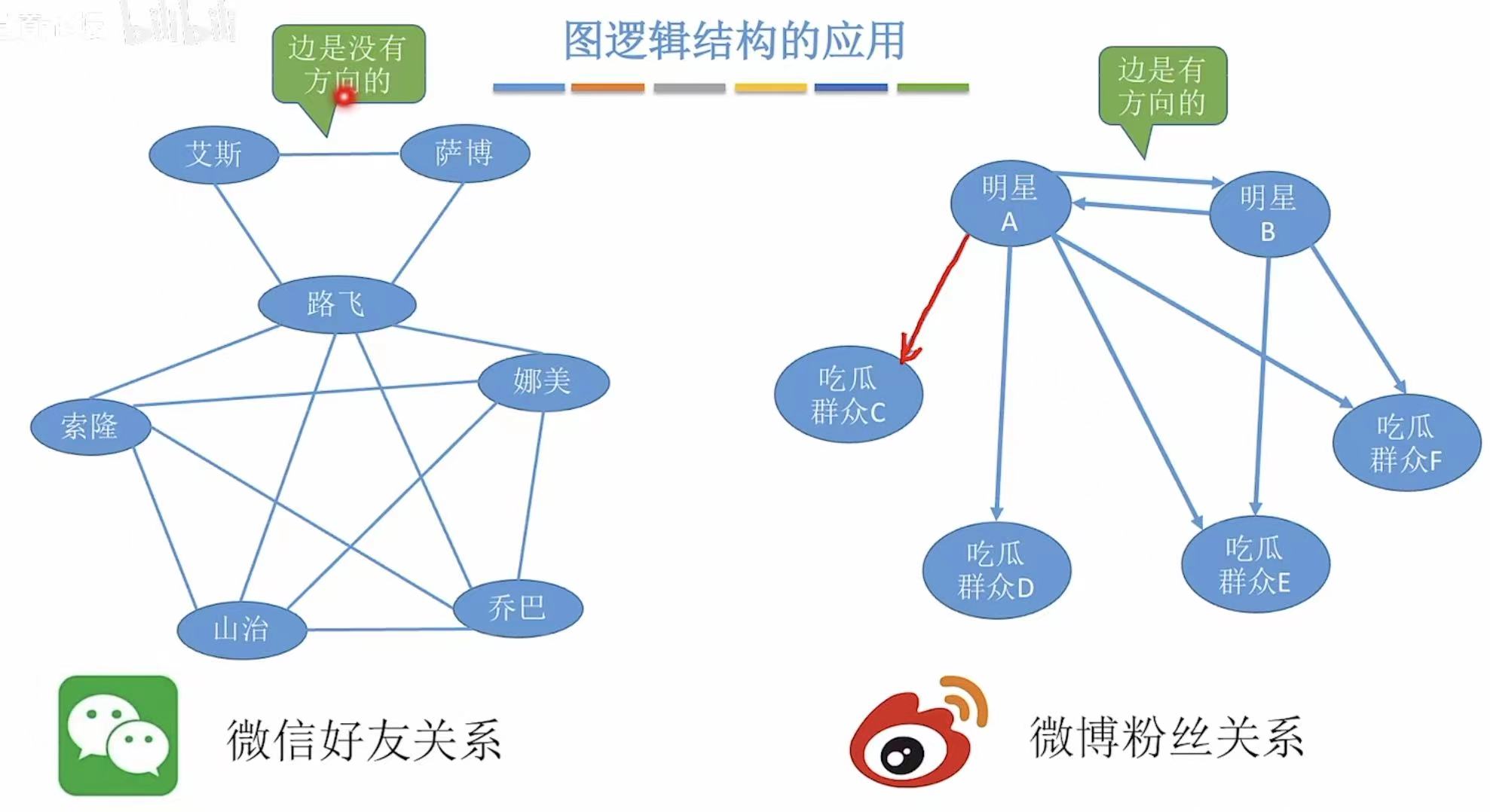
1.2 应用
图可以应用于各种线路,比如铁路和地图。
顶点 相当于具体位置,边 相当于道路路线。
图也可以用来表示各种关系,顶点 相当于每个个体,边 相当于每个人之间的关系。
1.3 普通图
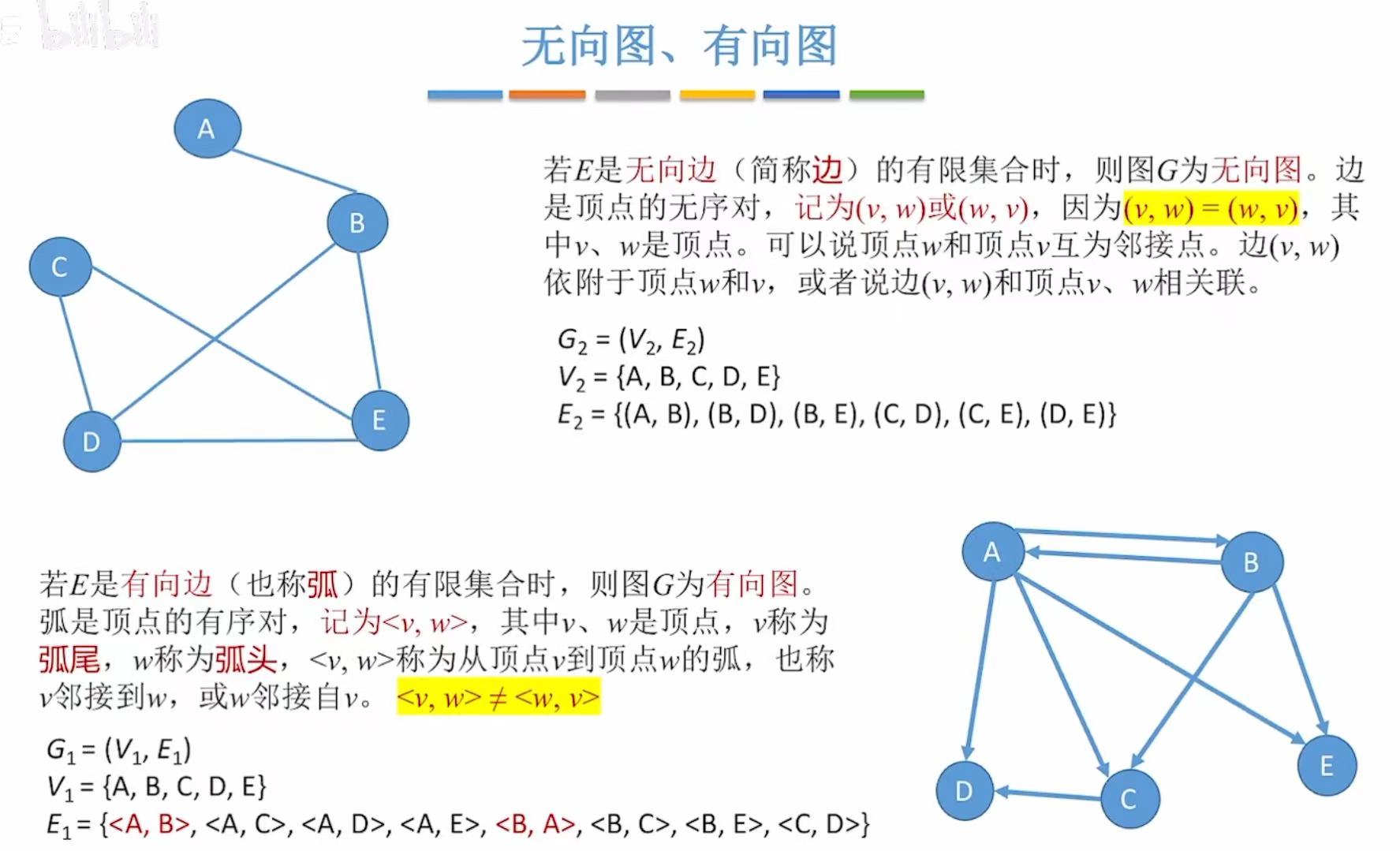
- 从上一个图,我们可以看出第一个图的边是没有箭头的,这就是无向图。
- 第二个图的边是有箭头的,这就是有向图 ,因为每个个体之间的指向是有区别的。
比如明星-->粉丝:明星的动态被关注自己的人看见,但是明星看不到粉丝的动态。
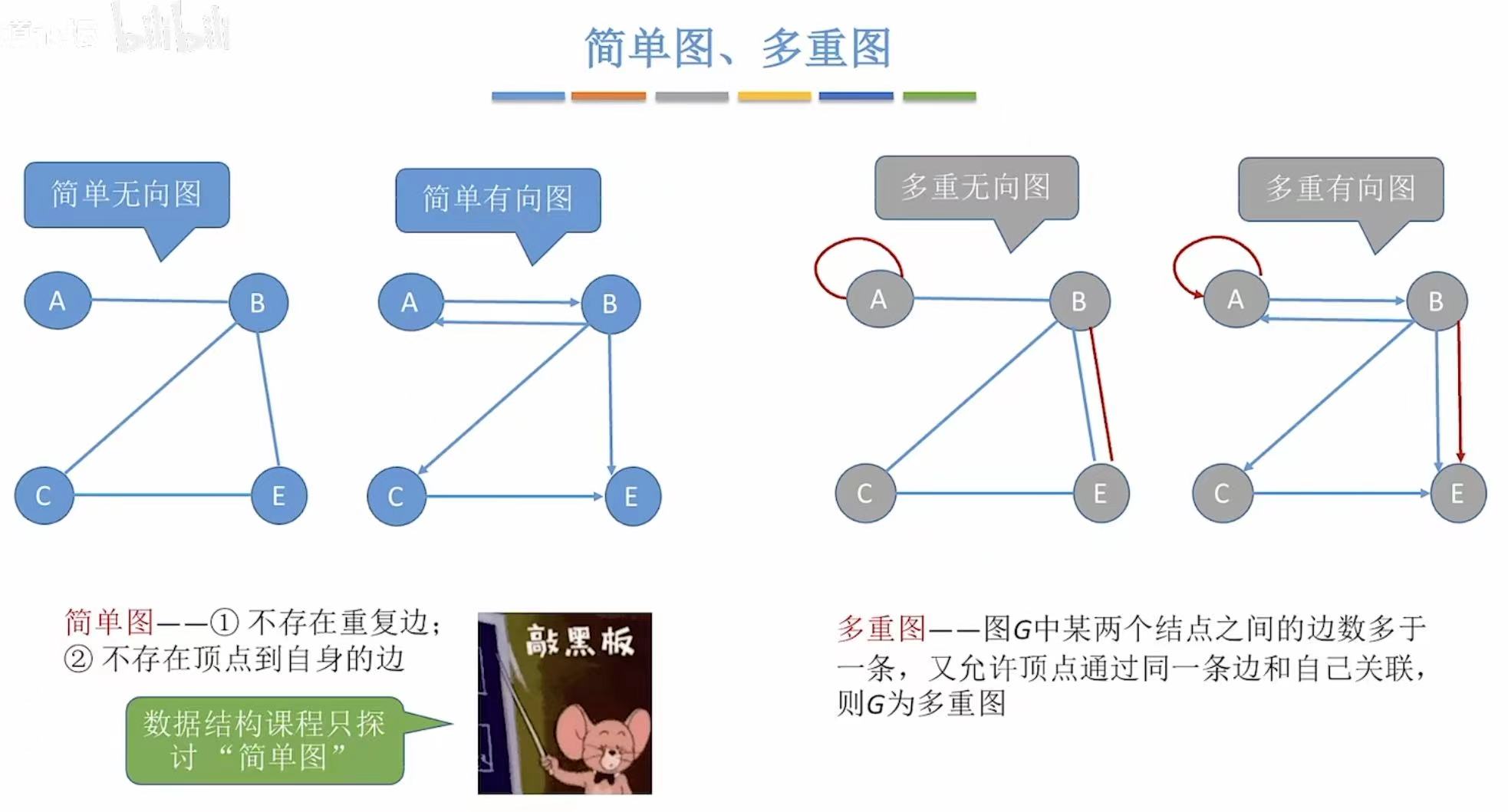
- 简单图:不存在重复边、不存在顶点到自身的边。
- 多重图:上面的都允许。
- 在数据结构中,我们只讨论简单图。
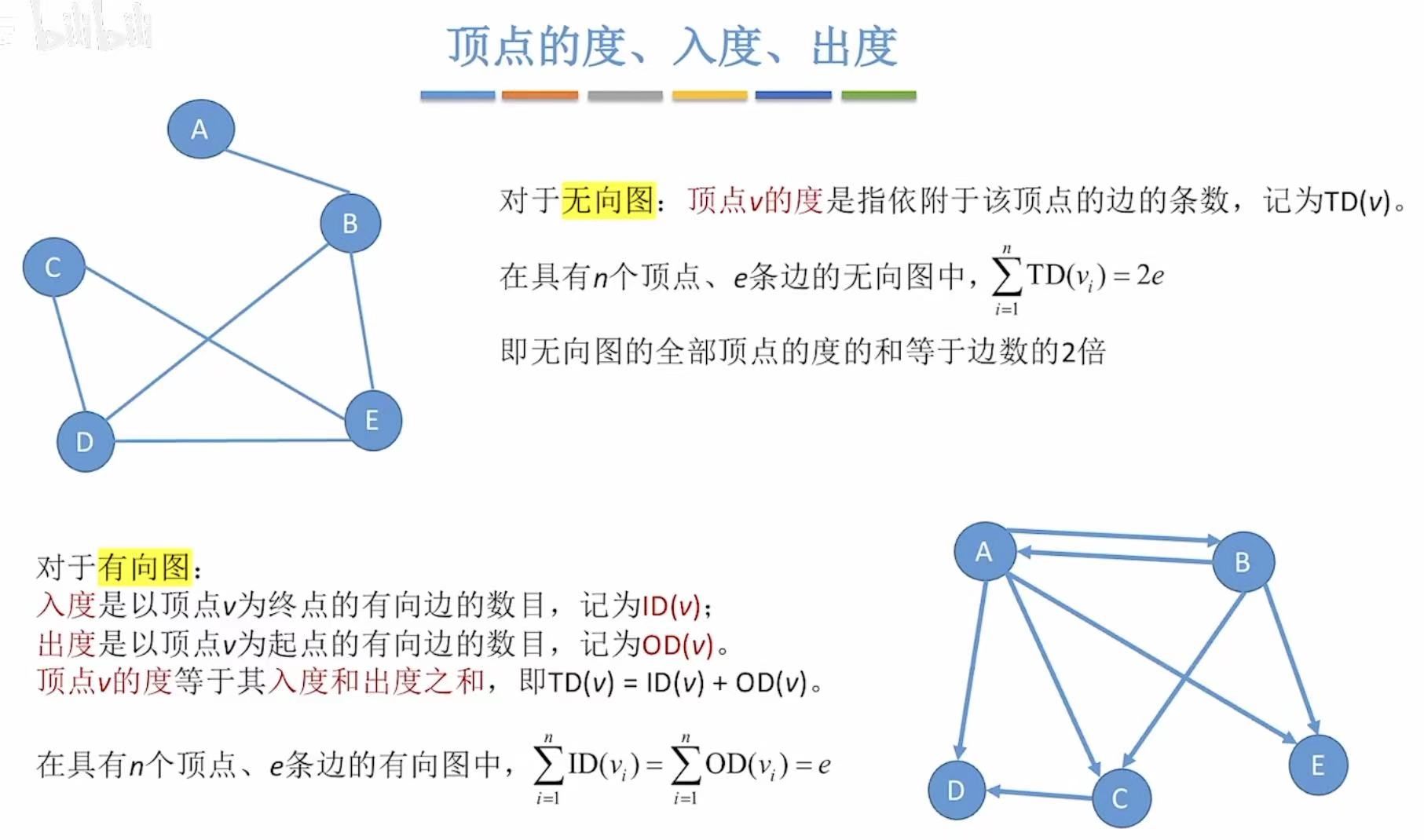
1.4 顶点相关
话说回来,那么我们应该怎样判断一个人是交际大人或者是微博大V呢?
我们就需要看这个人的顶点连接的边有的多少,这个边的条数 就叫做度 。
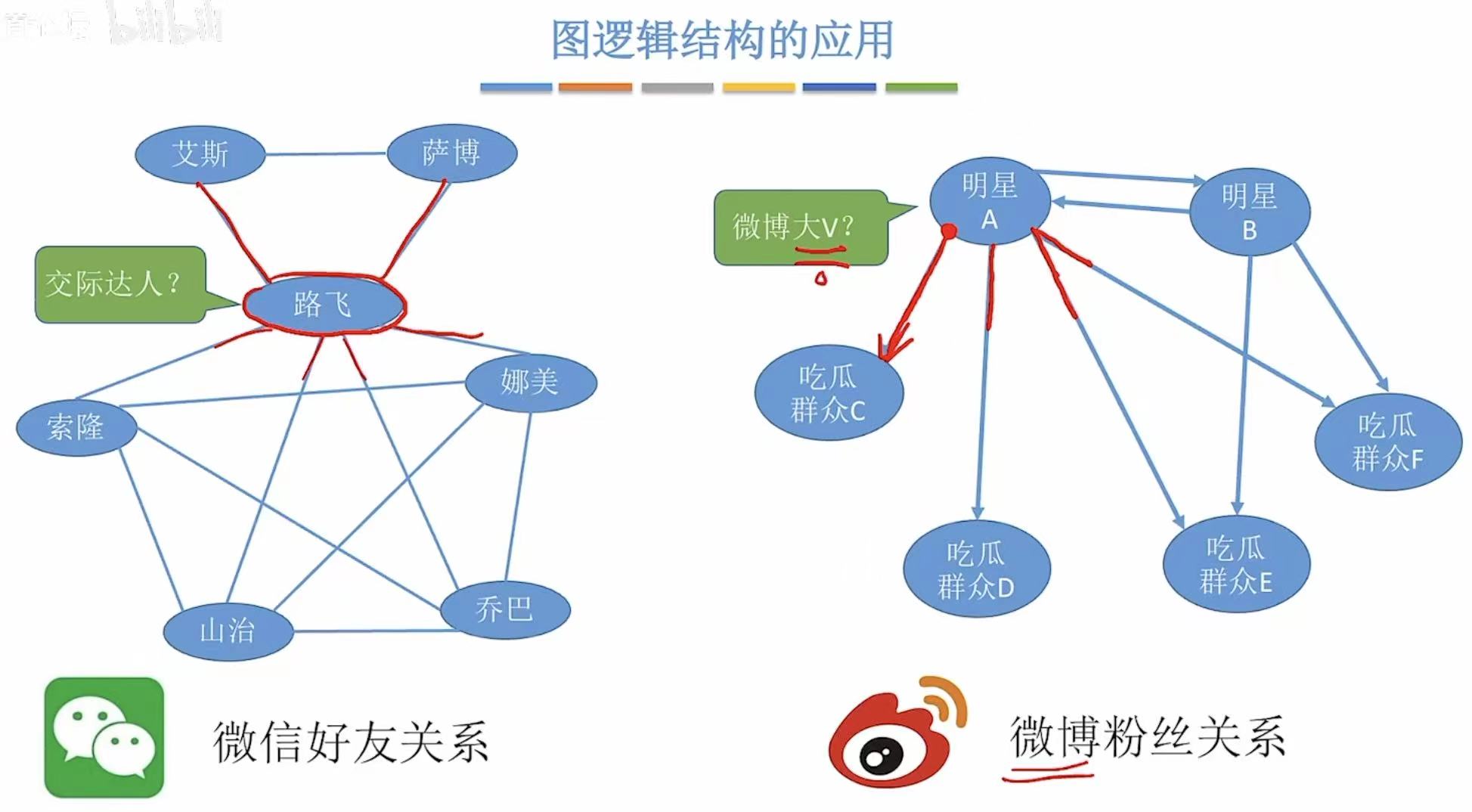
- 无向图:顶点的度就是该顶点的边的条数。
- 有向图 :因为是有方向的,所以又根据箭头和非箭头的两边分为入度和出度。
入度 :被箭头指的点就是入度。
出度 :没被箭头指的点就是出度。
顶点的度就是入度和出度的和。
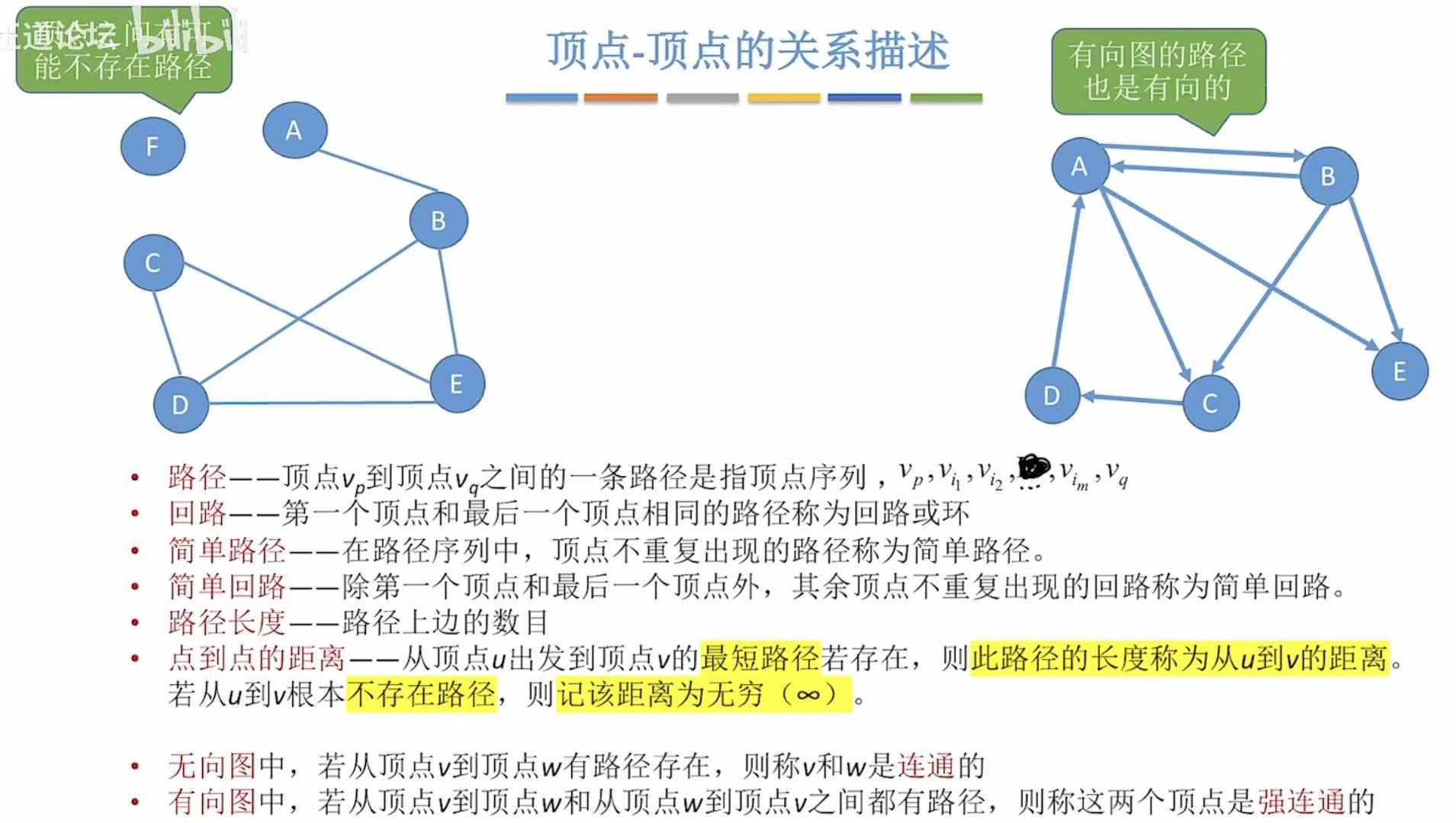
- 路径:比如C到E的路径-->CE、CDE、CDBE
- 回路:右图中的回路 ------ A ↔ B(来回)
- 上面举的几个例子都是简单路径/回路。
- 路径长度:CE的路径长度就是1.
- 点到点的距离:比如左图A到E的最短路径是ABE,那么点到点的距离就是2.
- 连通:A可以到B,就是连通。
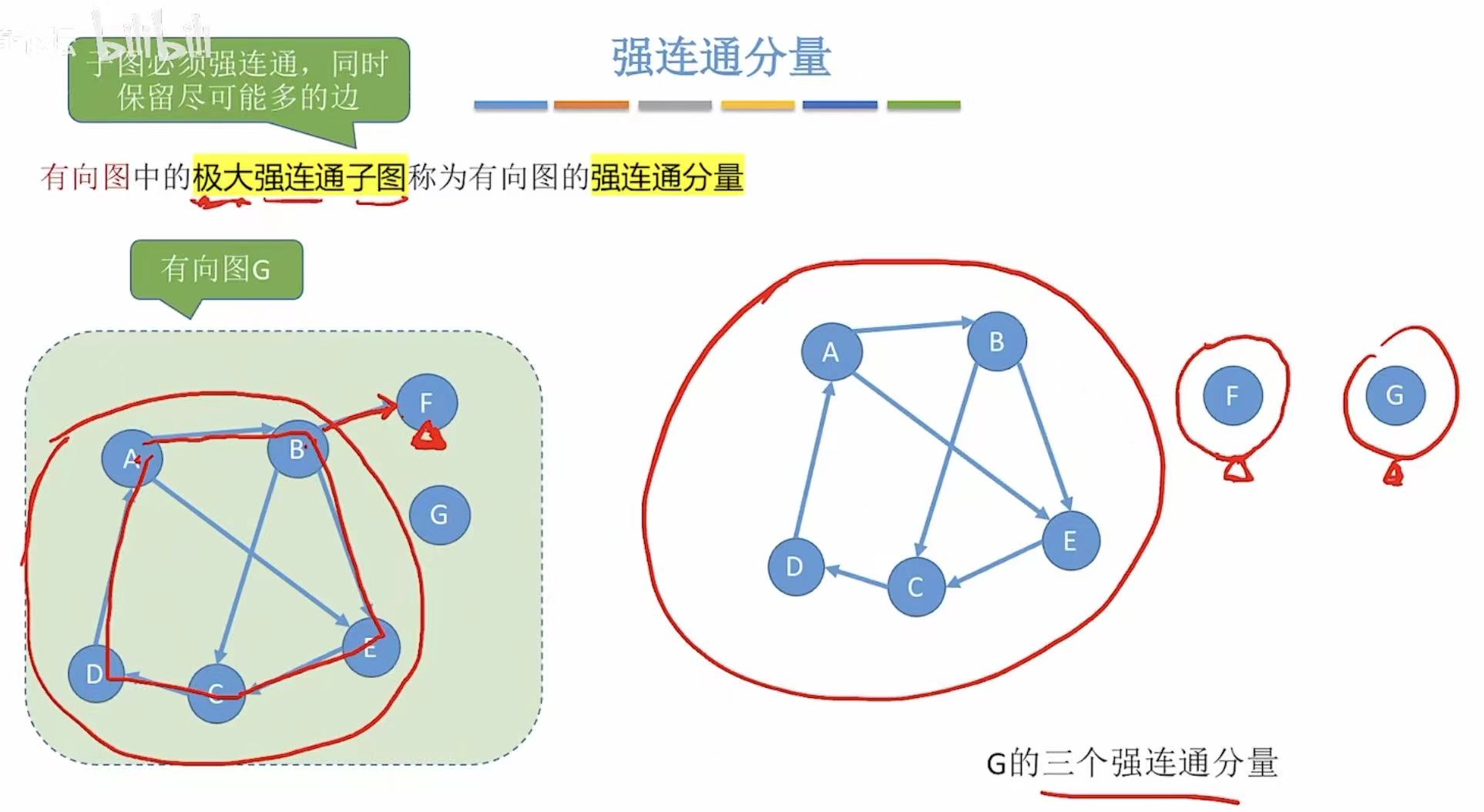
- 强连通 :A可以到B,B可以到A,就是强连通。
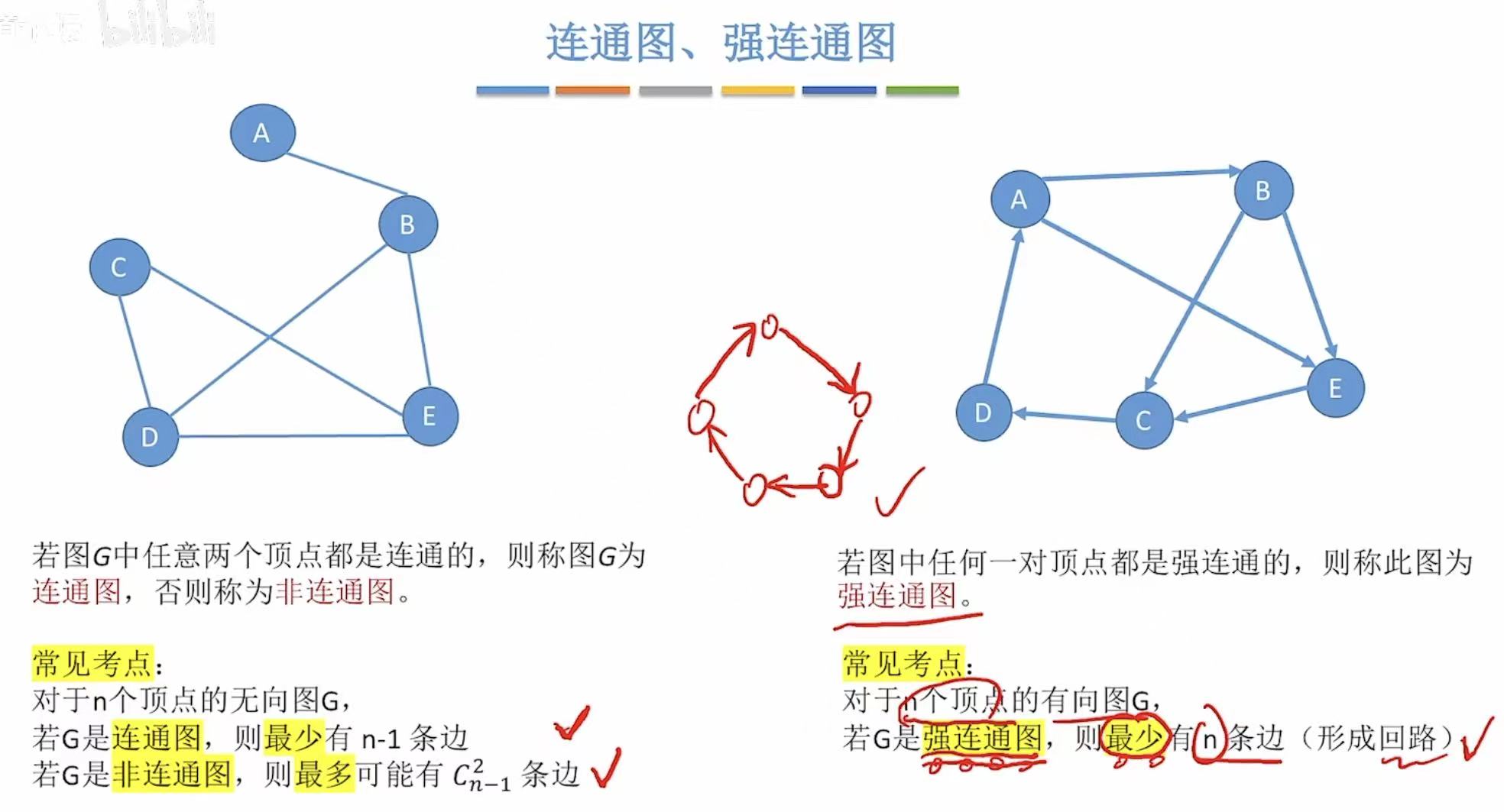
- 连通图:任意两点都能走得通。
- 强连通图 :任意两点可以正向走得通,也可以反向走得通。
子图 :从整体图上拆下来的图。老规矩,可以没边但是不能没顶点。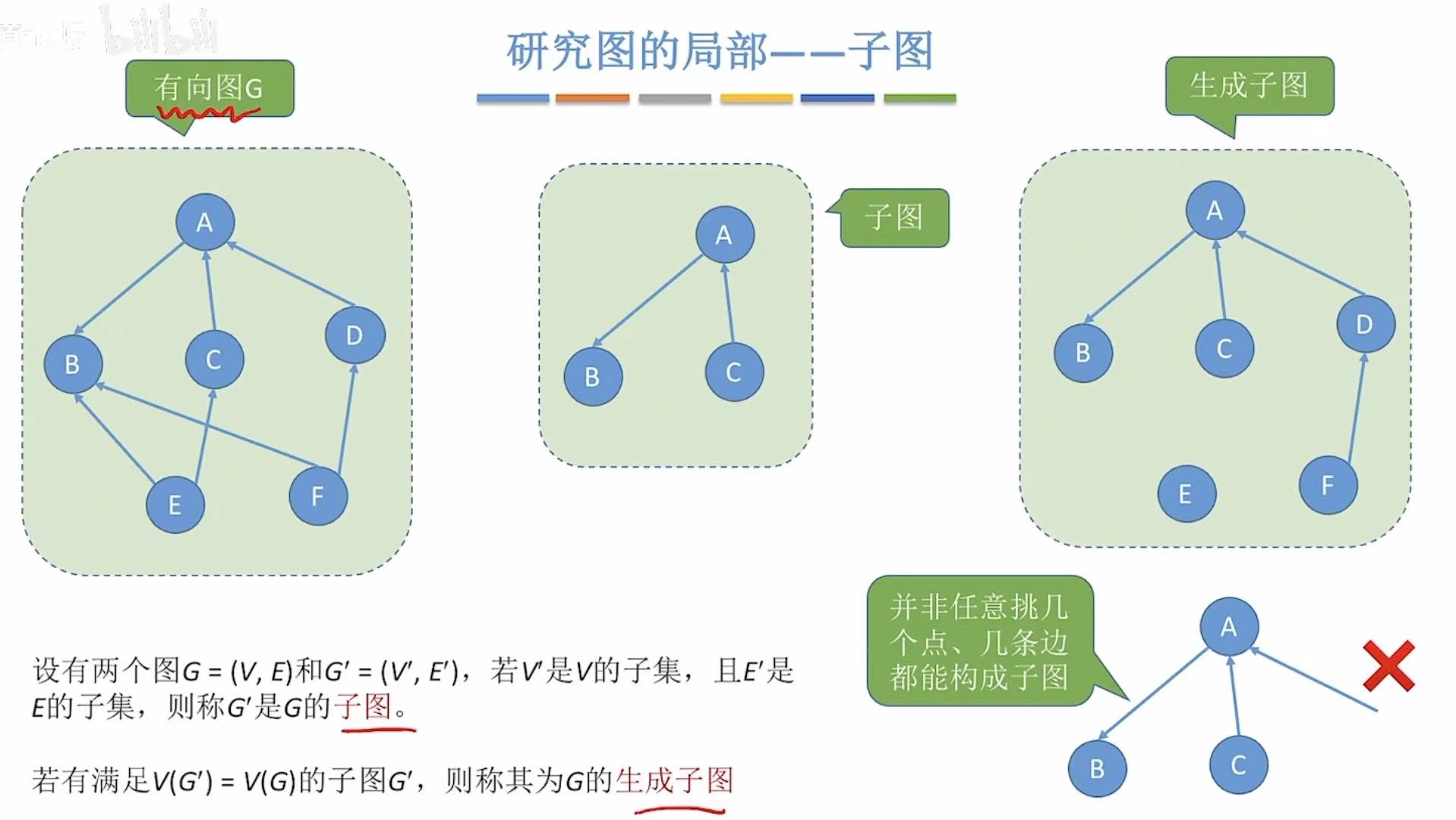
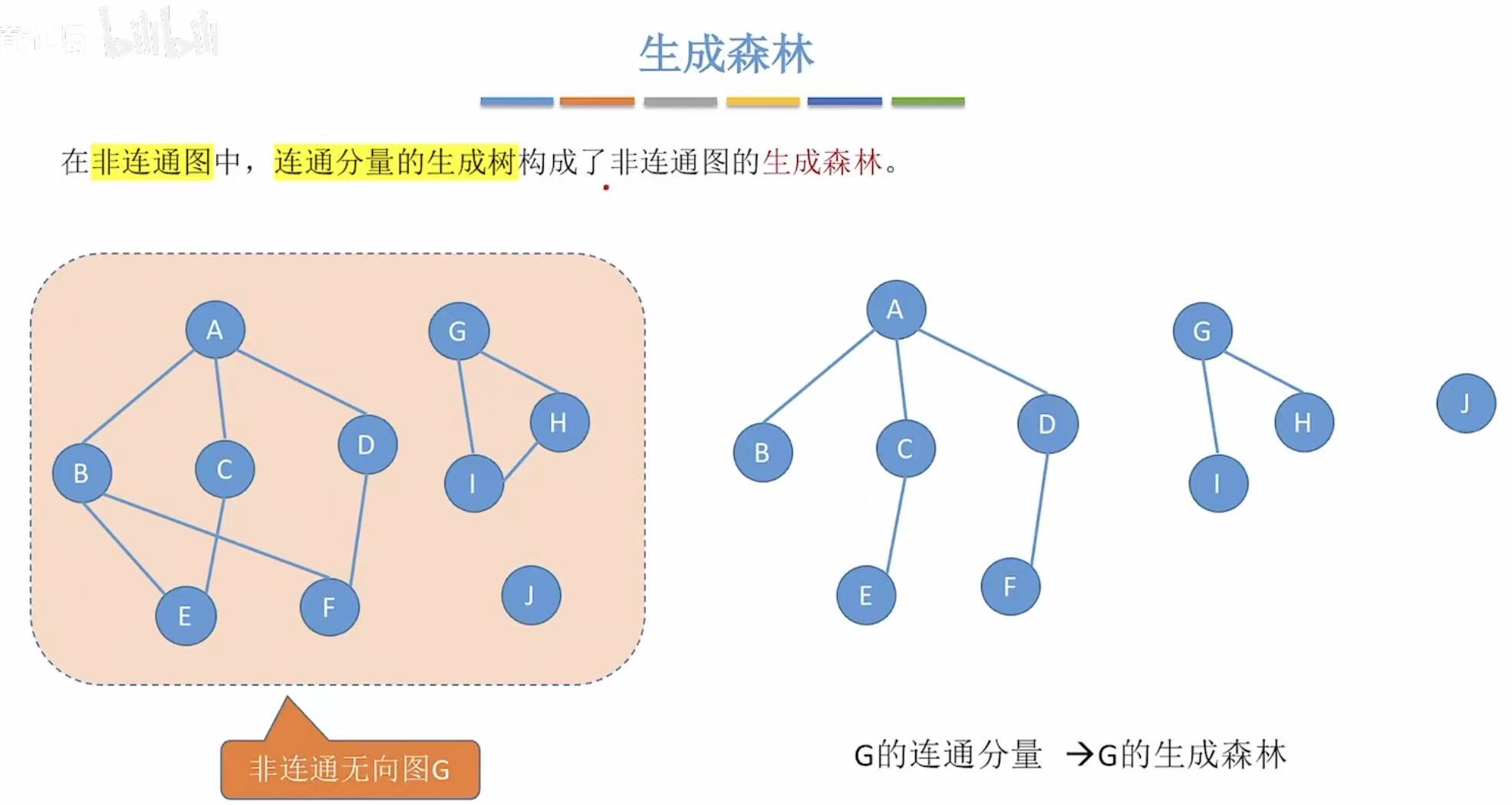
1.5 (强)连通分量
连通分量 :几个内部全部连通的、但是外部相互之间不连通的个体。
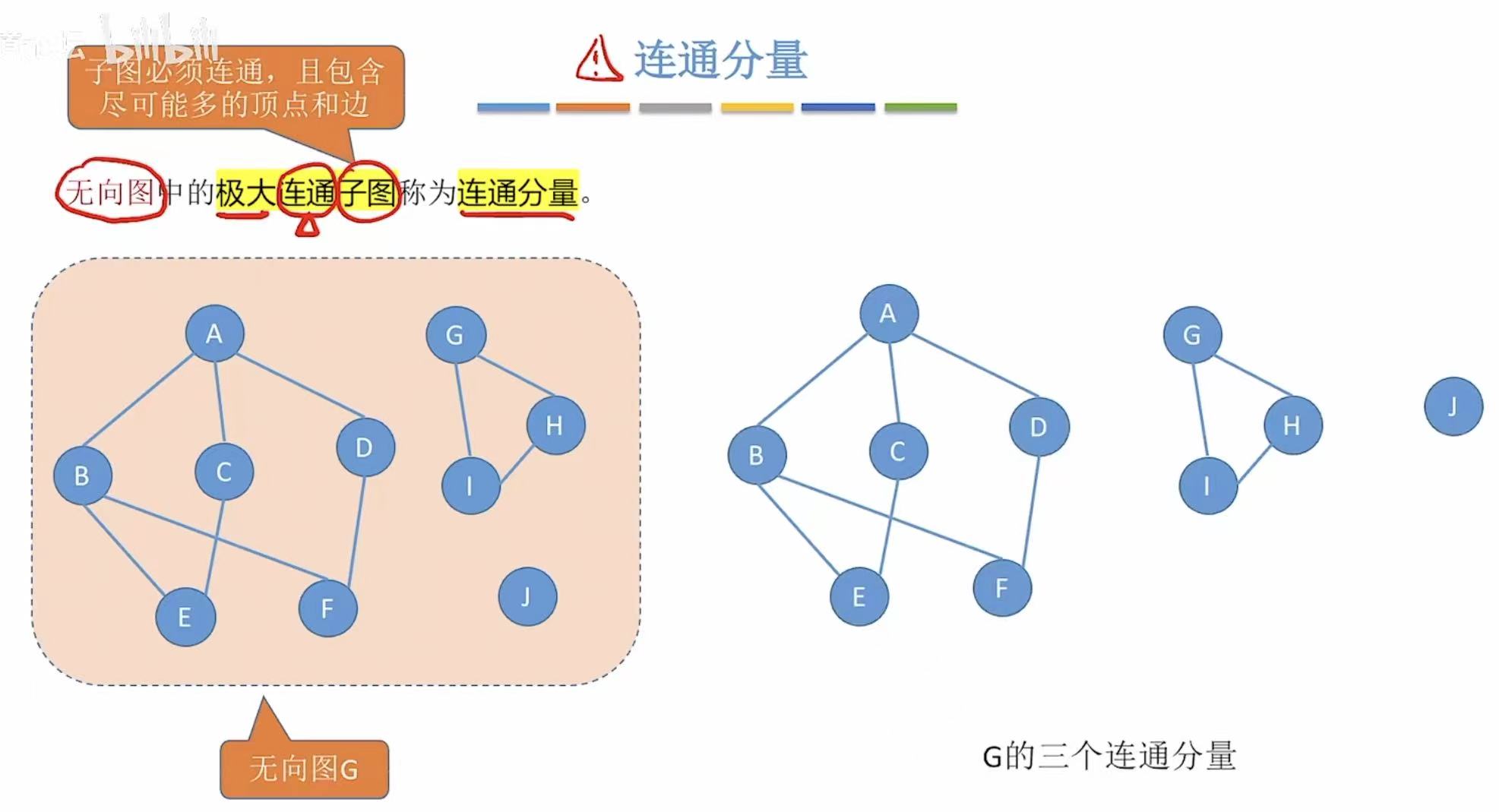
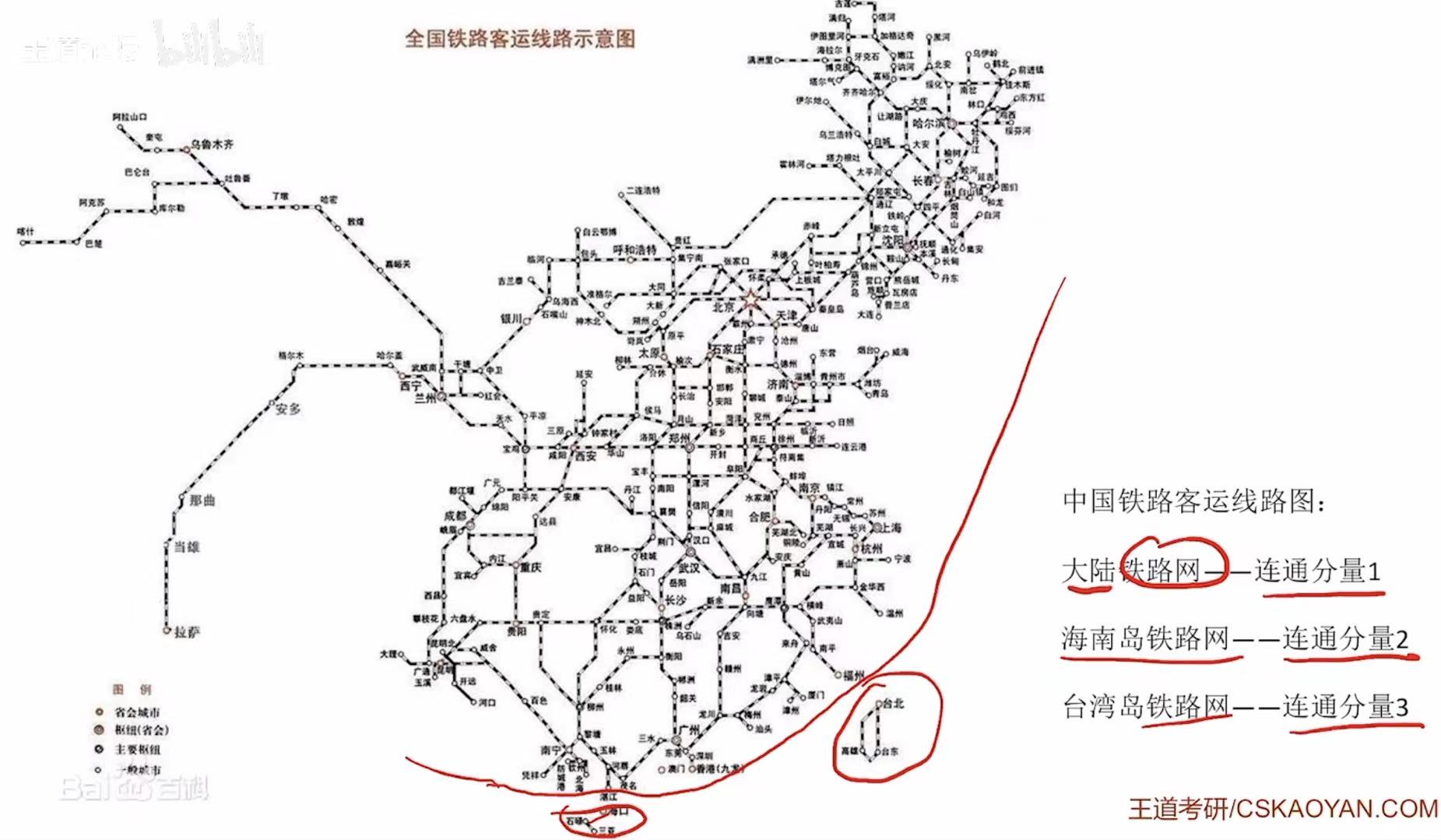
如图:
- 大陆之中的顶点相互之间全部连通,所以这是一个连通分量。
- 海南岛和台湾岛内部的顶点也是全部连通的,所以这是两个连通分量。
- 但是这三者之间不是相互连通的,所以这三个是独立的连通分量。
同理。(一坨一个分量)
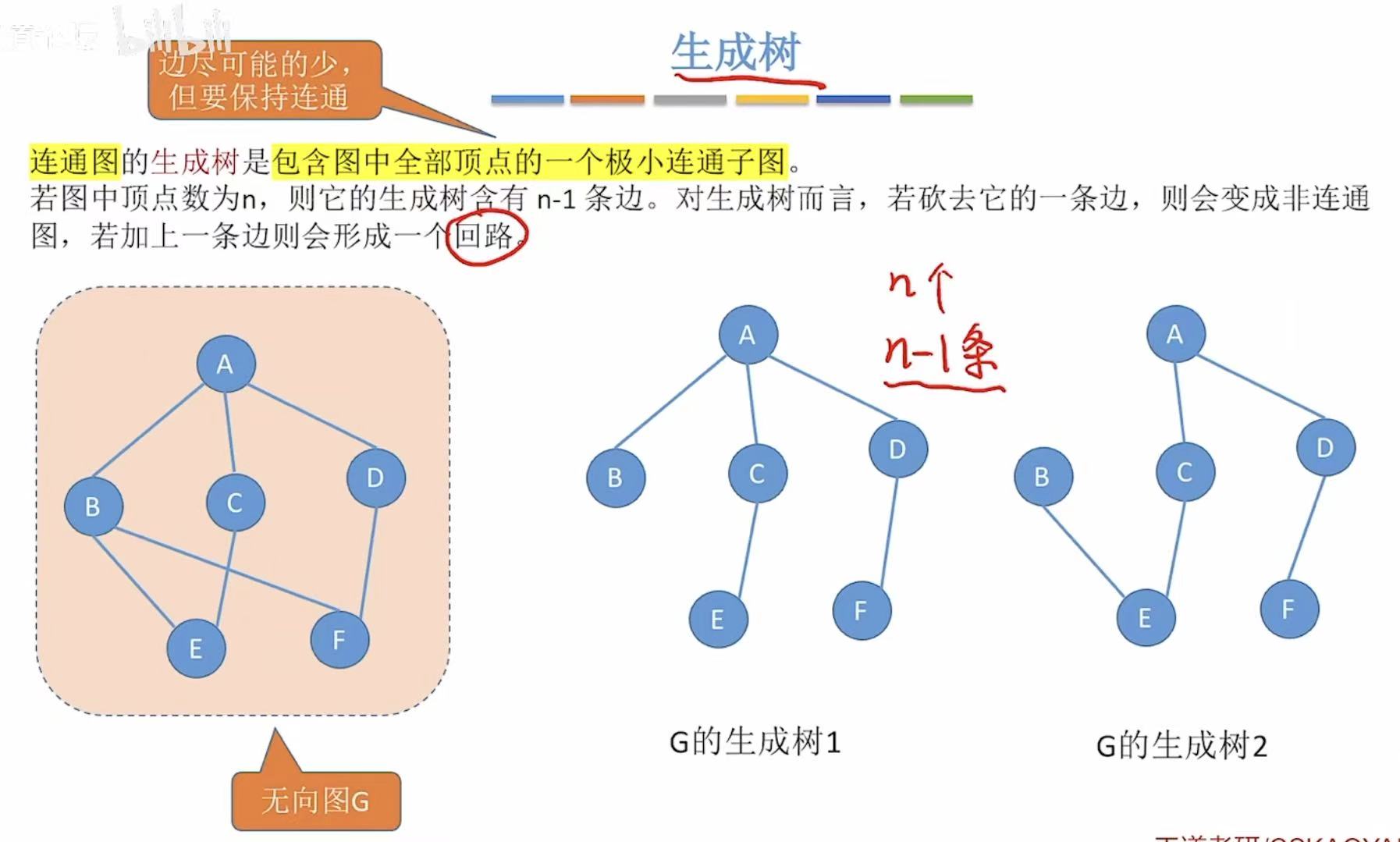
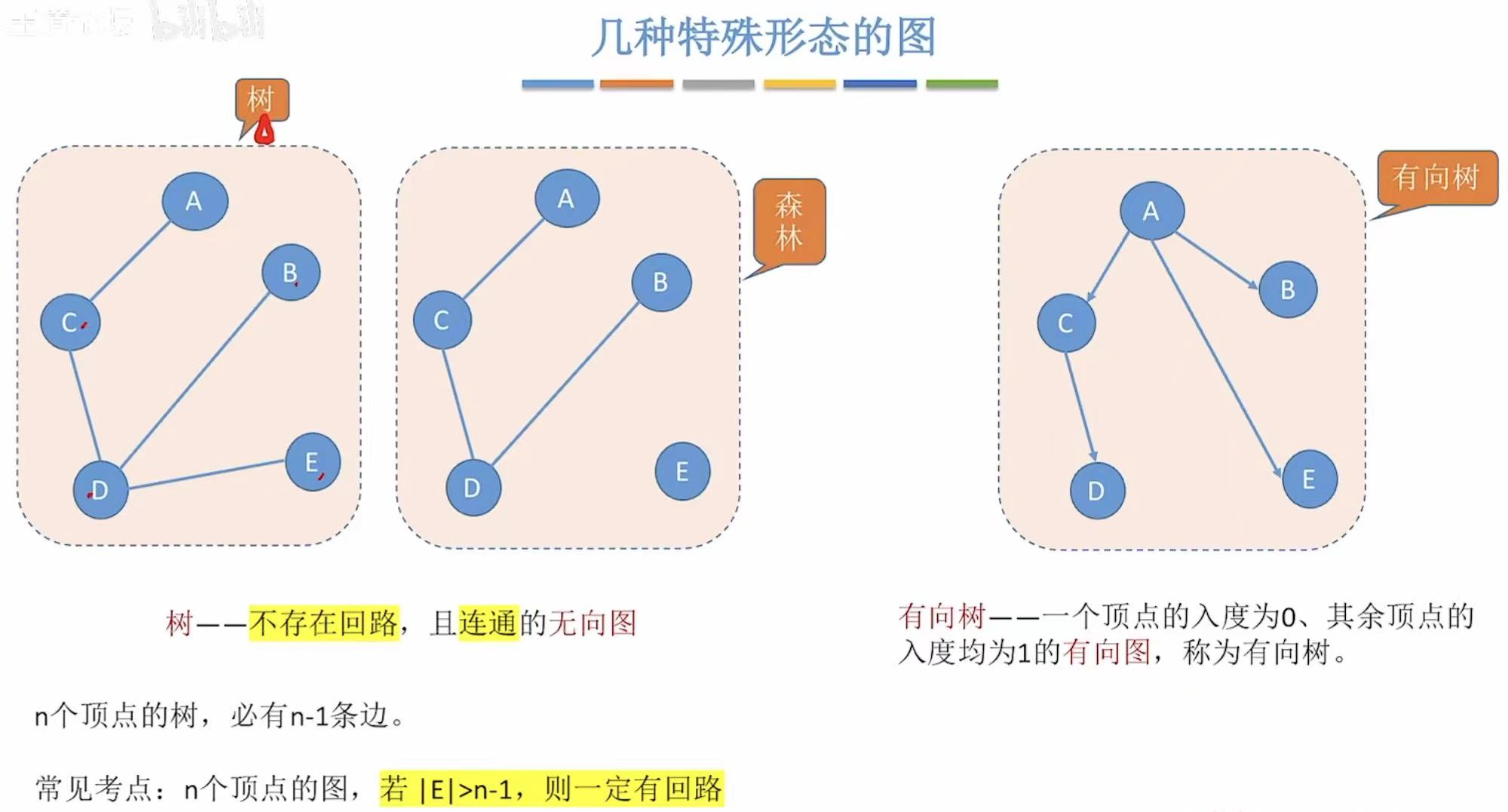
1.6 生成树/森林
边尽可能少+保持连通
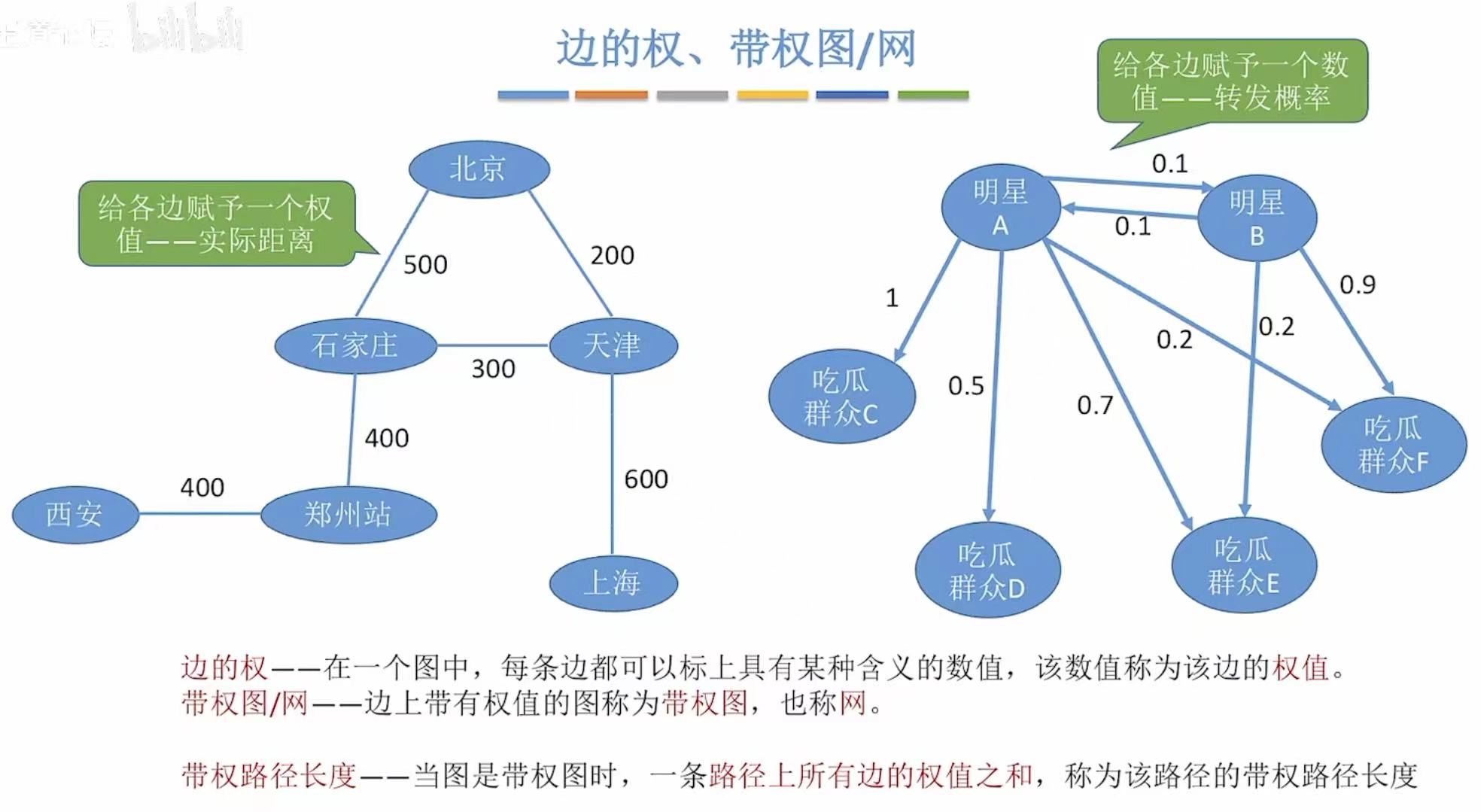
1.7 边的权
通过给每个边赋予一个权值,就可以代入具体的应用:比如修铁路看怎么修成本最低神马的。
有权值的图就叫做带权图 ,也叫网 。
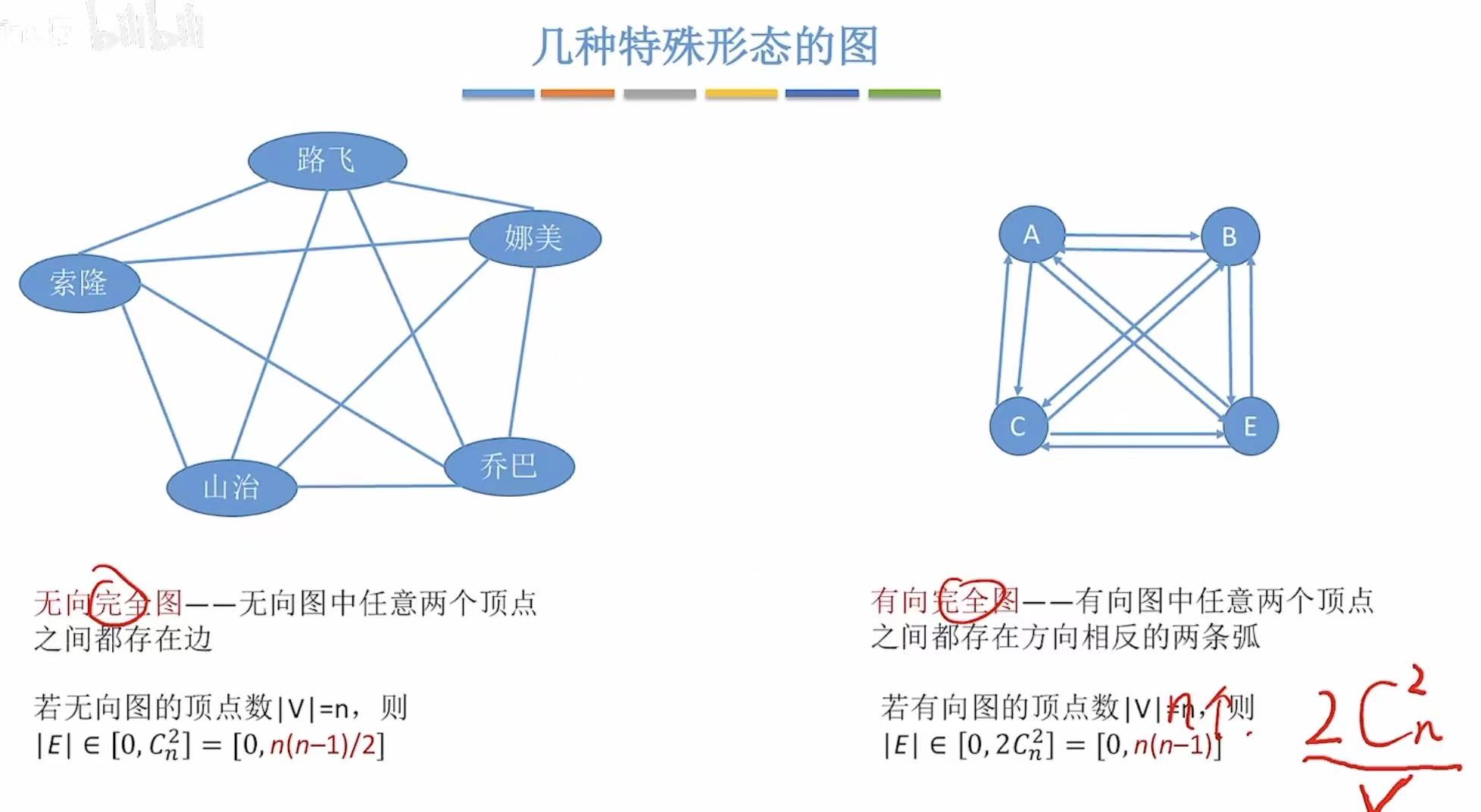
2. 特殊的图
- 无向完全图:重在完全,每个顶点之间都有一条直接的边。
- 有向完全图 :同上,不过有箭头。
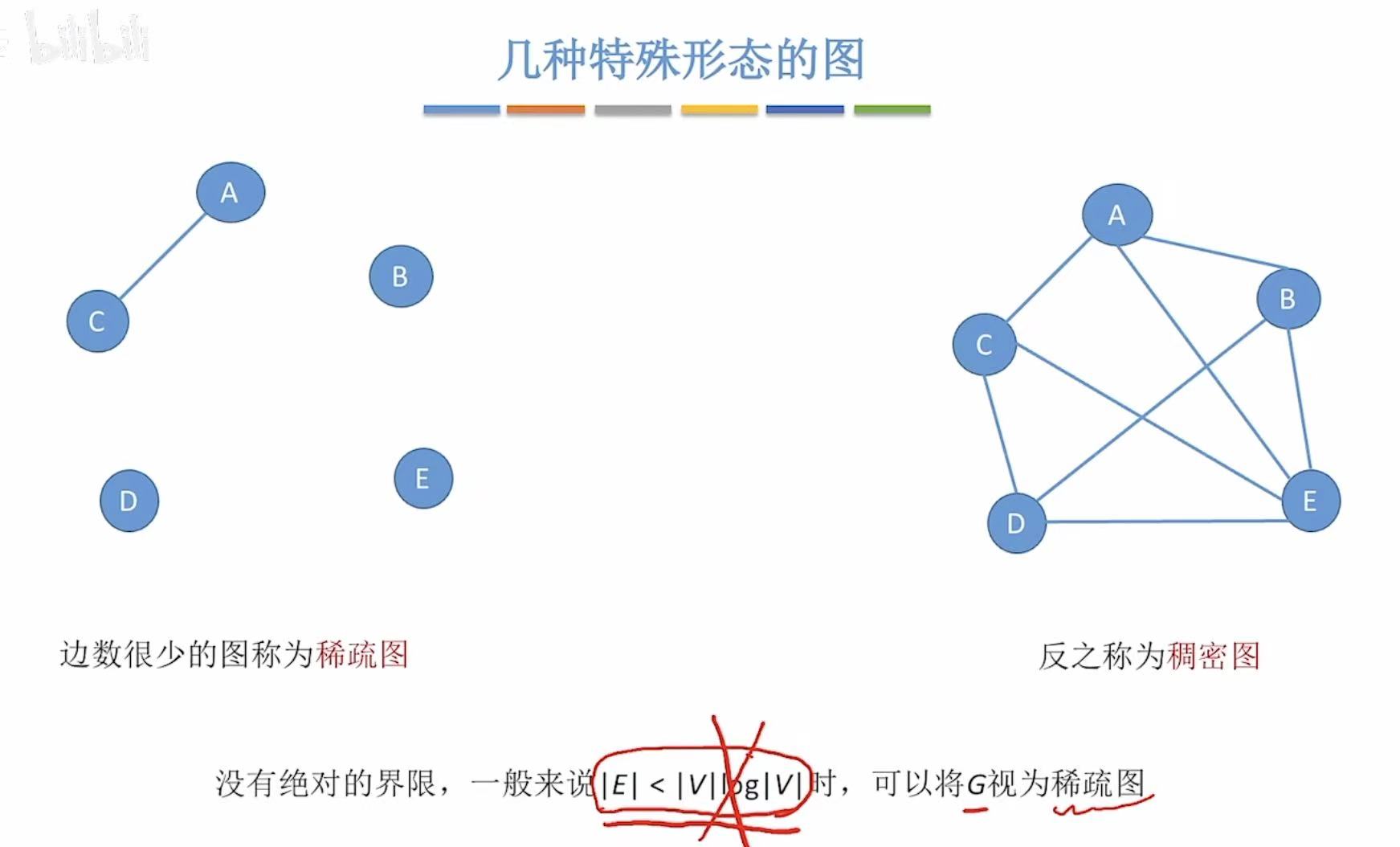
- 稀疏图:边数很少。
- 稠密图:和稀疏图相反。
- 了解就好。
特殊到和树/森林长得一模一样。
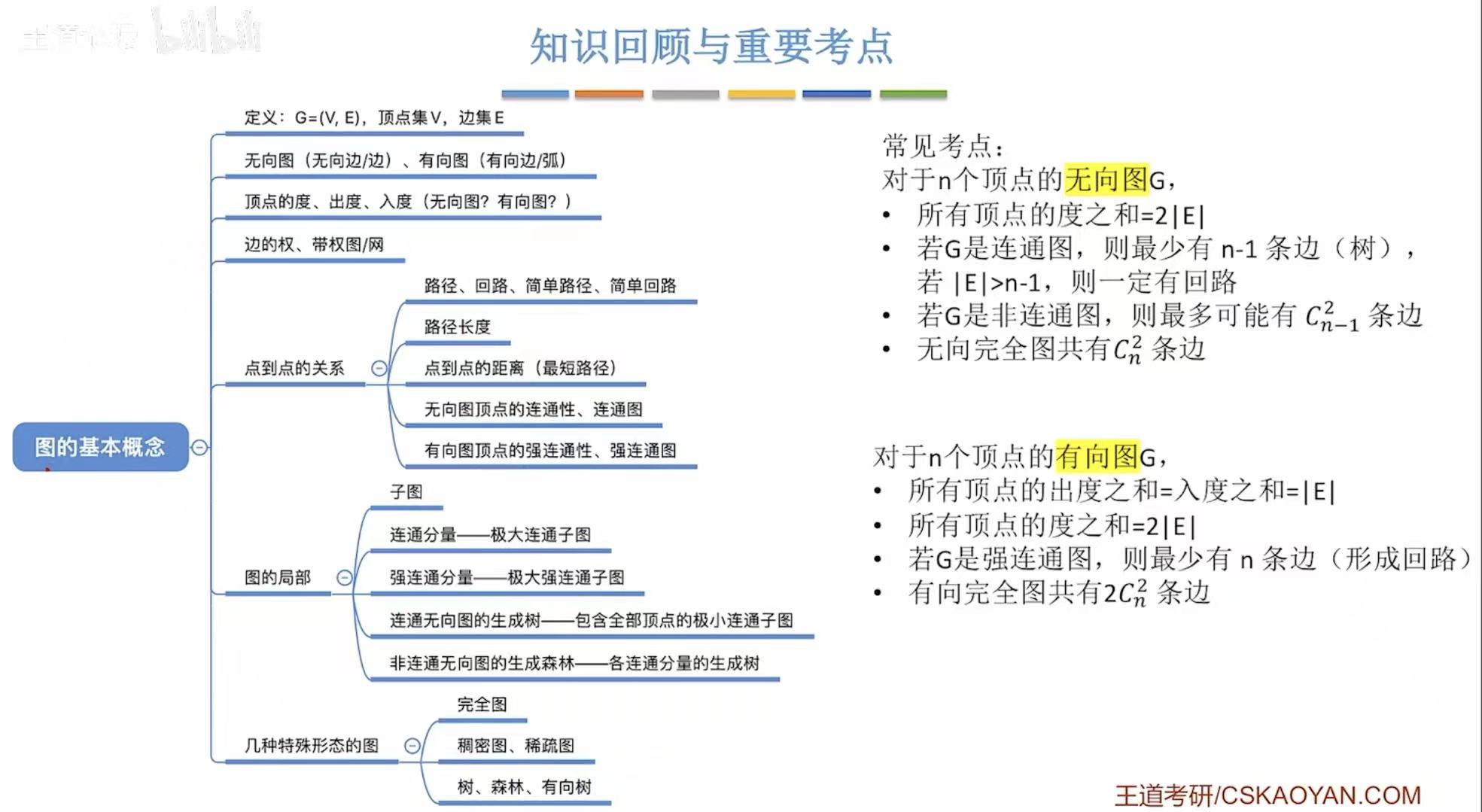
3. 小结
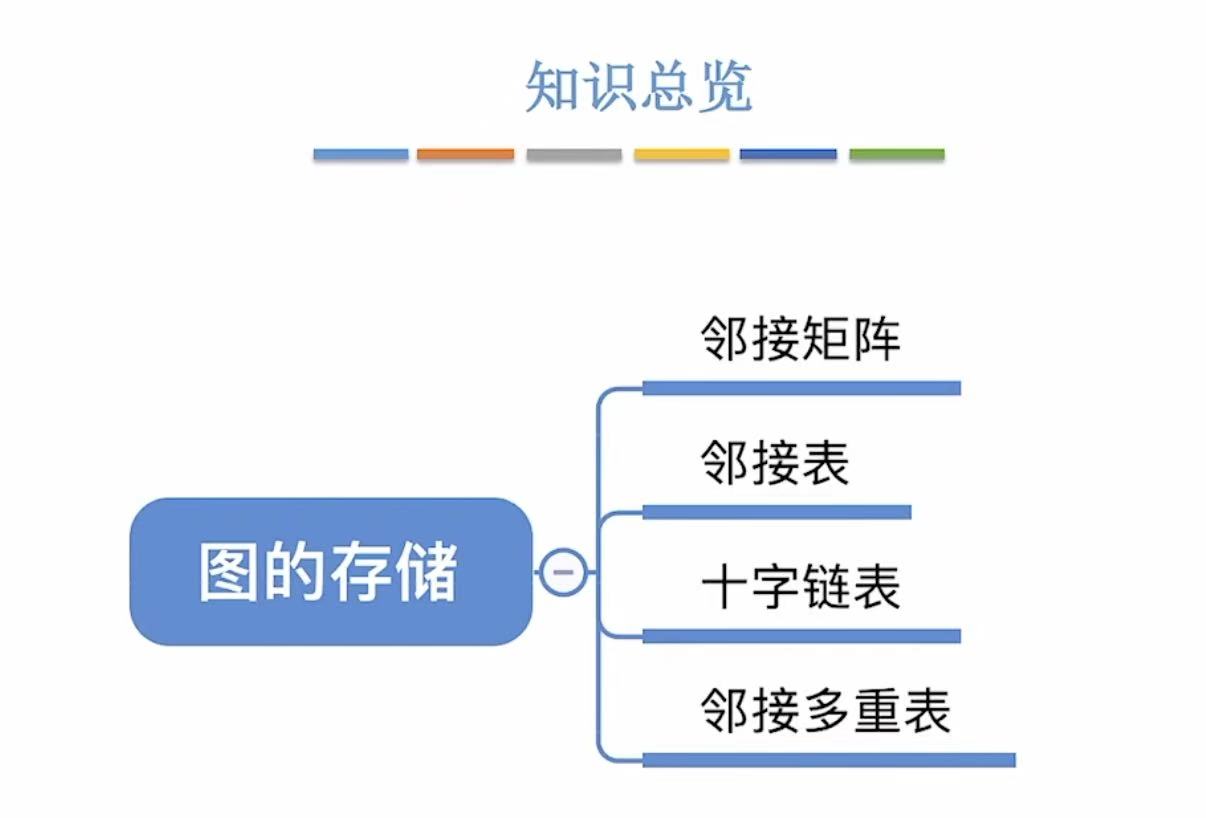
图的存储
1. 邻接矩阵
1.1 概念
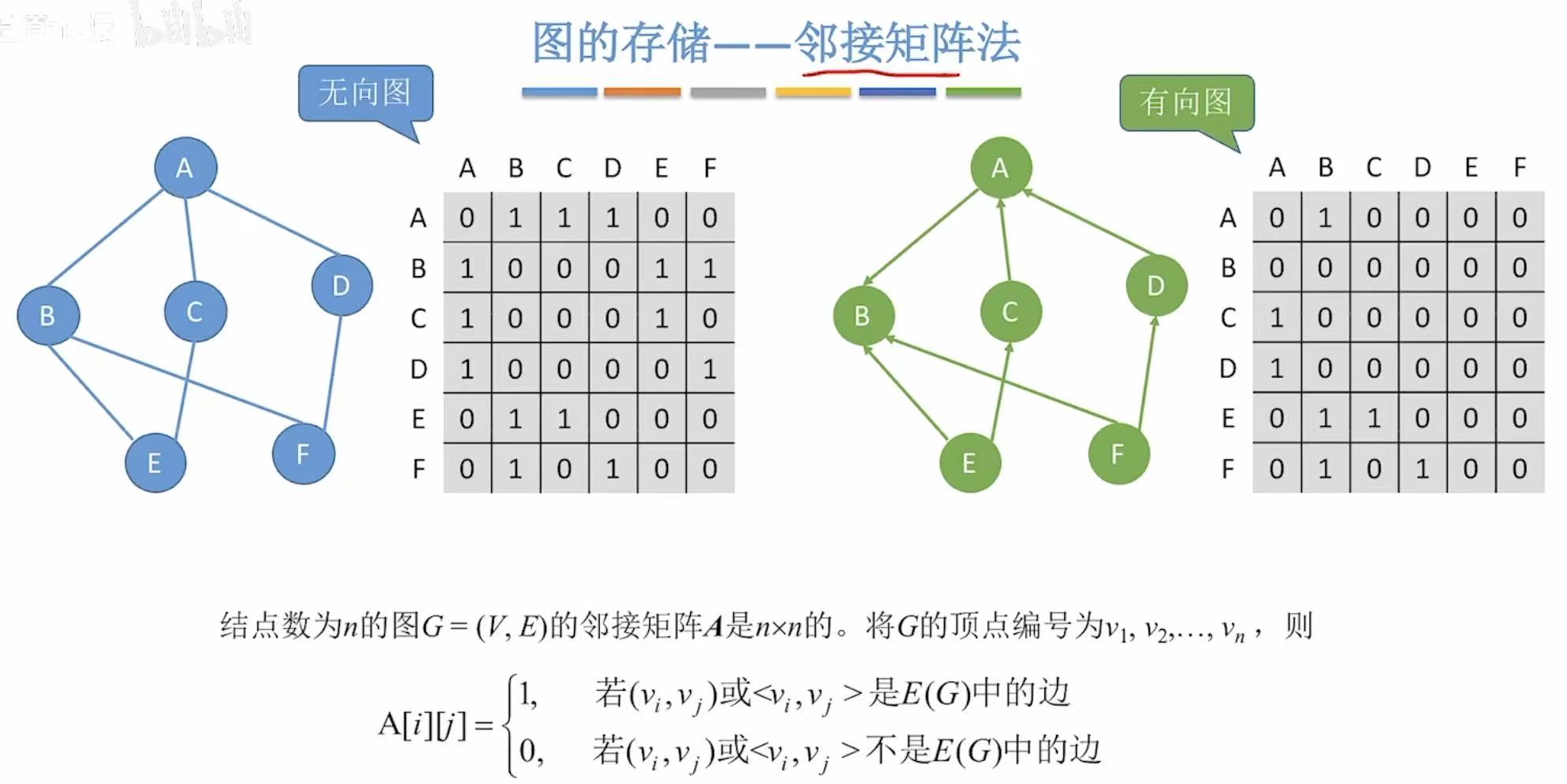
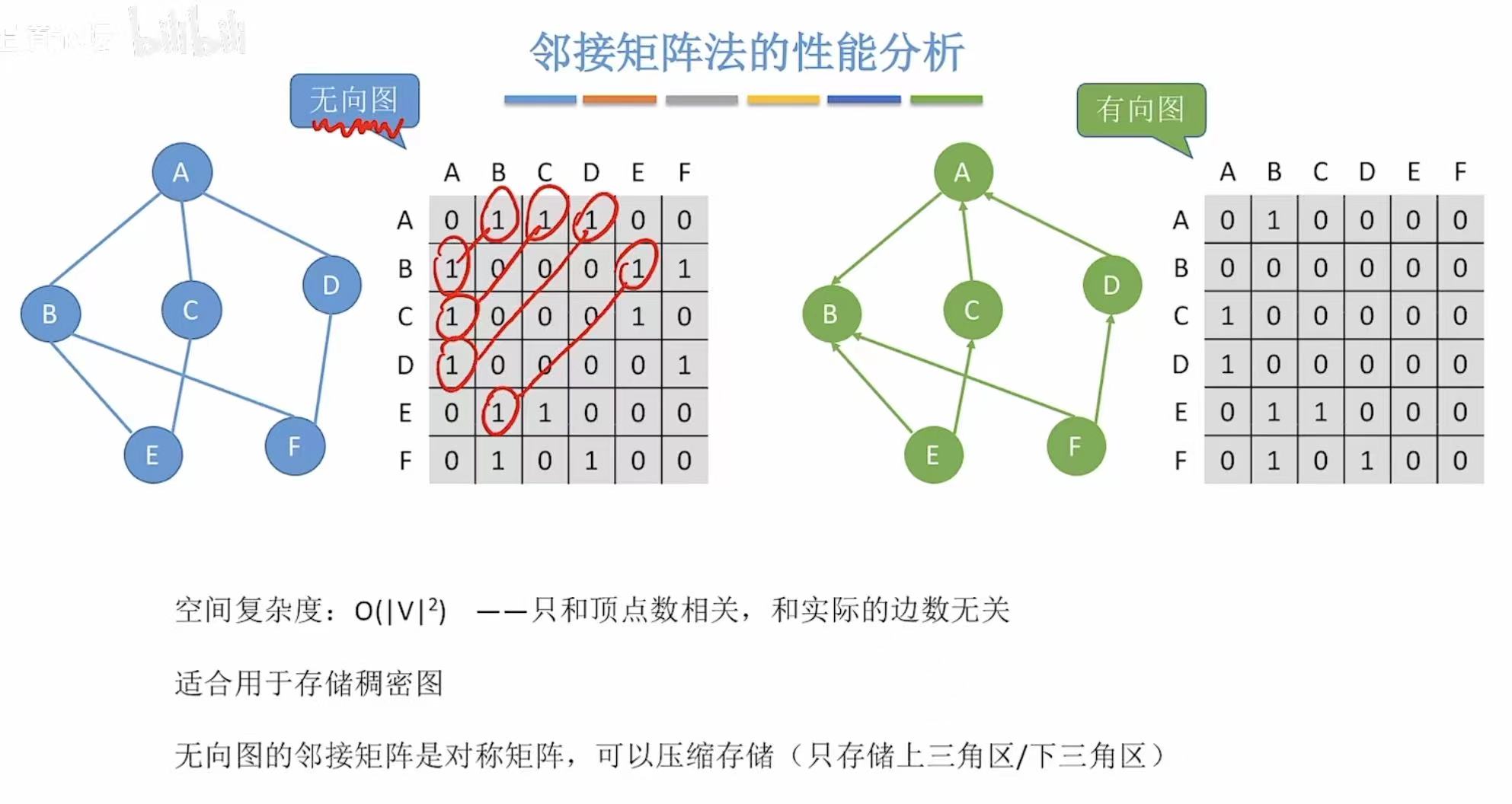
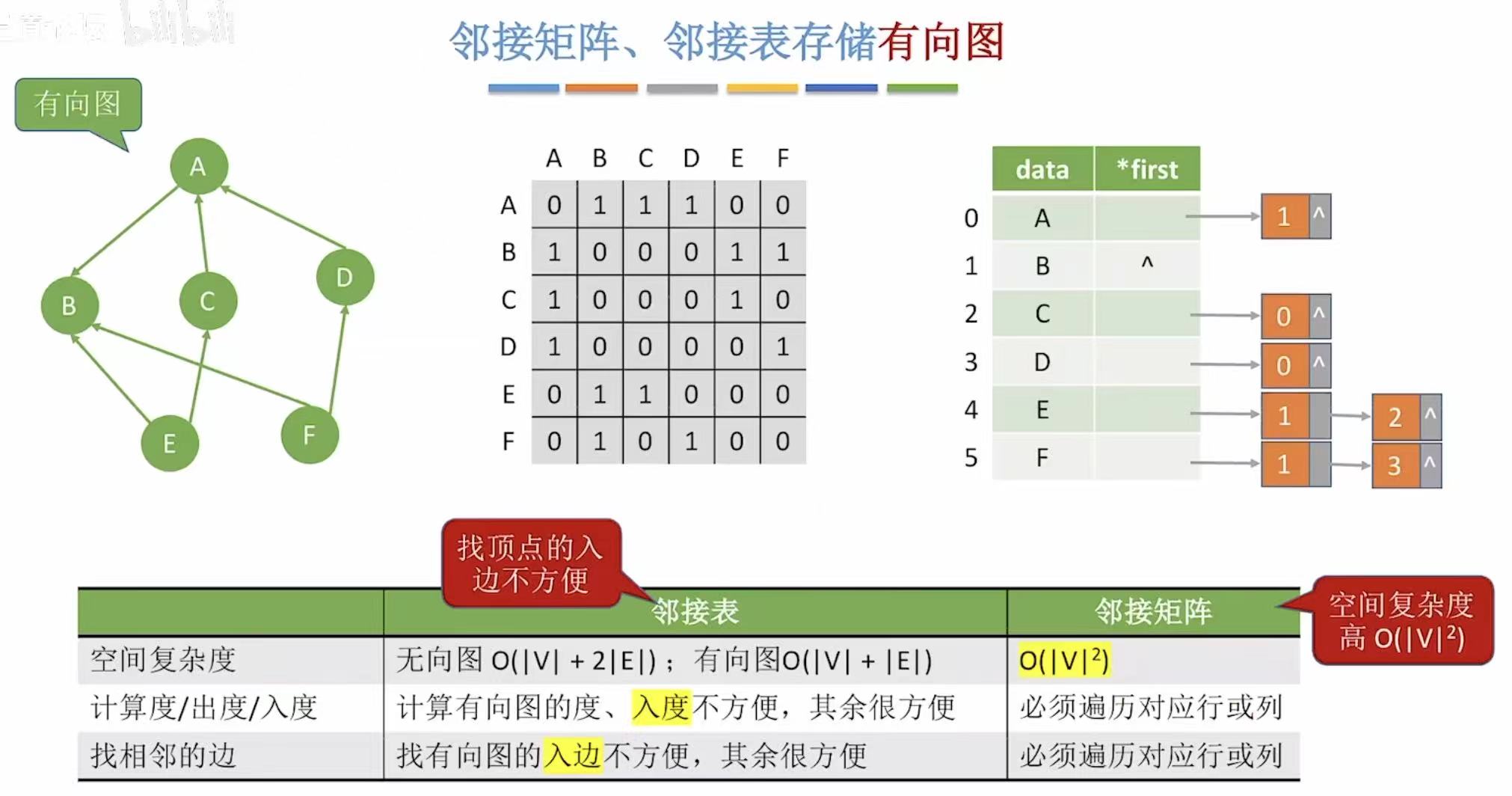
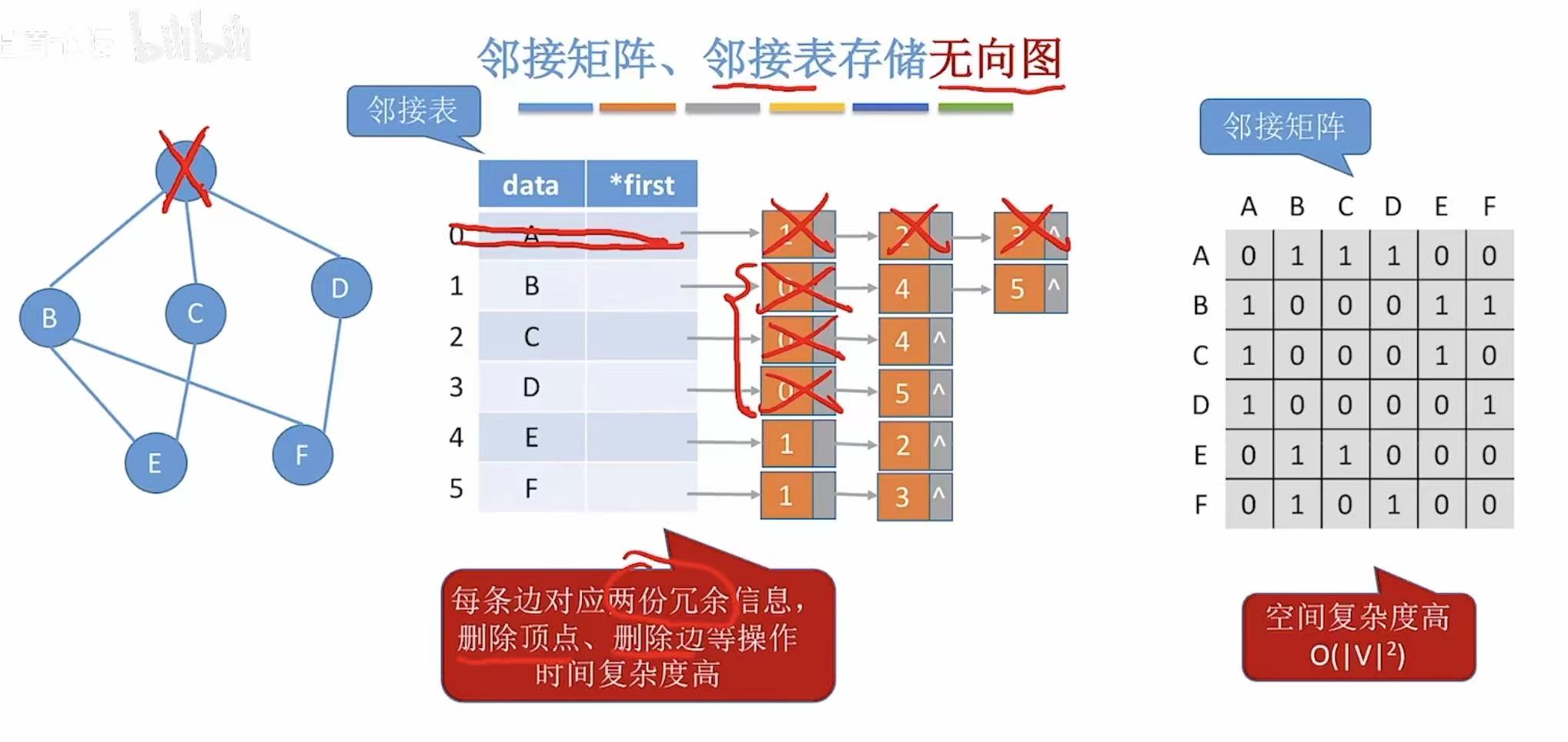
- 无向图:横纵轴表示含义相同,仅表示这两点之间有没有边,有1无0.
- 有向图:纵-->横,纵就是没箭头的那端,横就是有箭头的那段。
java
#define MaxVertexNum 100 // 定义图中顶点数目的最大值(最多100个顶点)
// 定义图的结构体:MGGraph(Matrix Graph)
typedef struct {
char Vex[MaxVertexNum]; // 顶点表:存储所有顶点的信息(如字符、数字等)
// 这里用 char 类型,比如 'A', 'B', 'C' 等
// 可以改为更复杂类型(如结构体)来存更多信息
int Edge[MaxVertexNum][MaxVertexNum]; // 邻接矩阵:存储边的关系
// Edge[i][j] 表示顶点 i 到顶点 j 是否有边
// 无向图:Edge[i][j] == Edge[j][i]
// 有向图:方向不同,值可能不同
// 值为 0 表示无边,1 或权重表示有边
int vexnum, arcnum; // 图的当前实际顶点数和边数(弧数)
// vexnum:当前有多少个顶点被使用
// arcnum:当前有多少条边(或弧)
} MGGraph;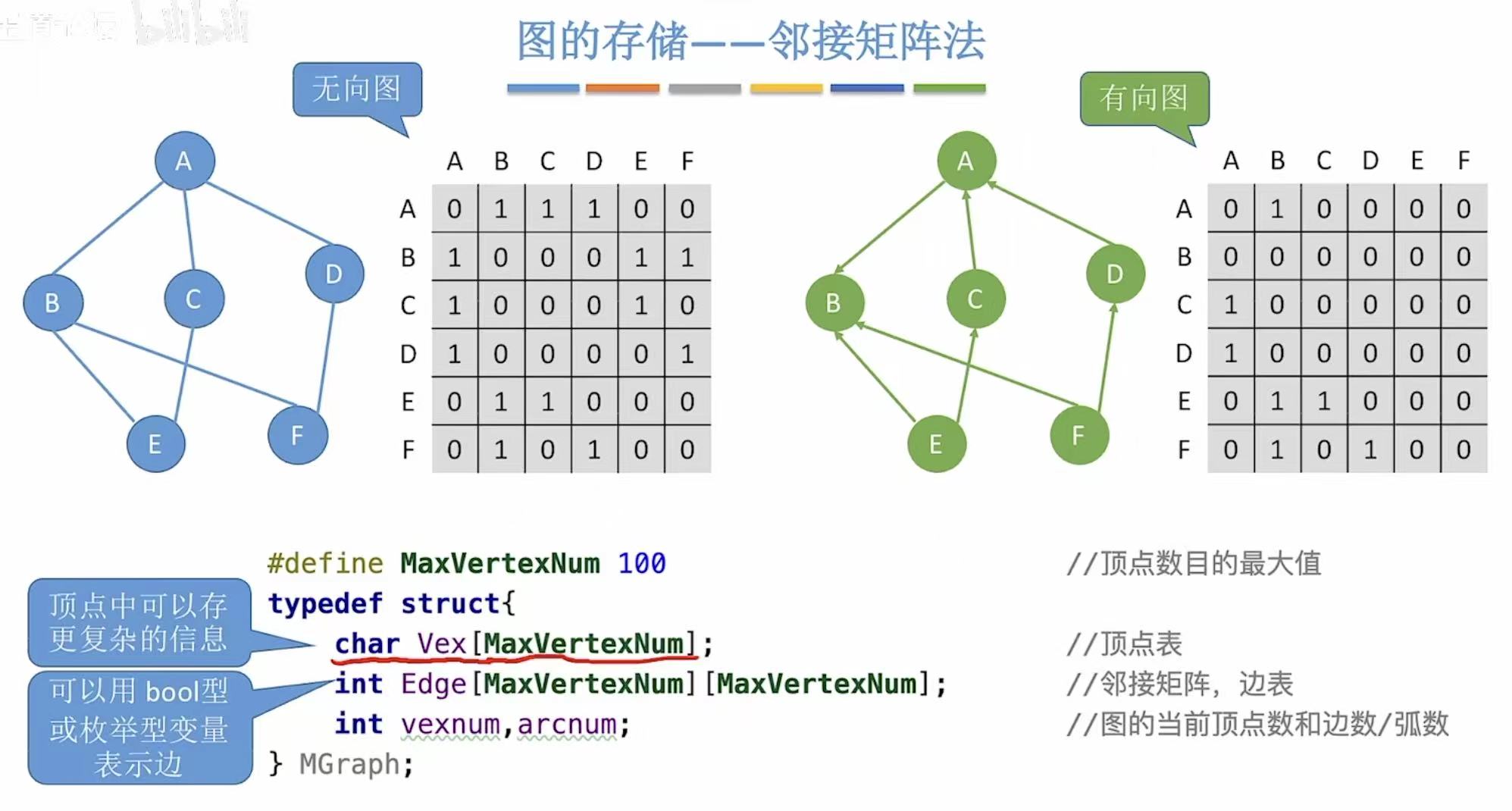
就是有边的标1,没有边的标0.
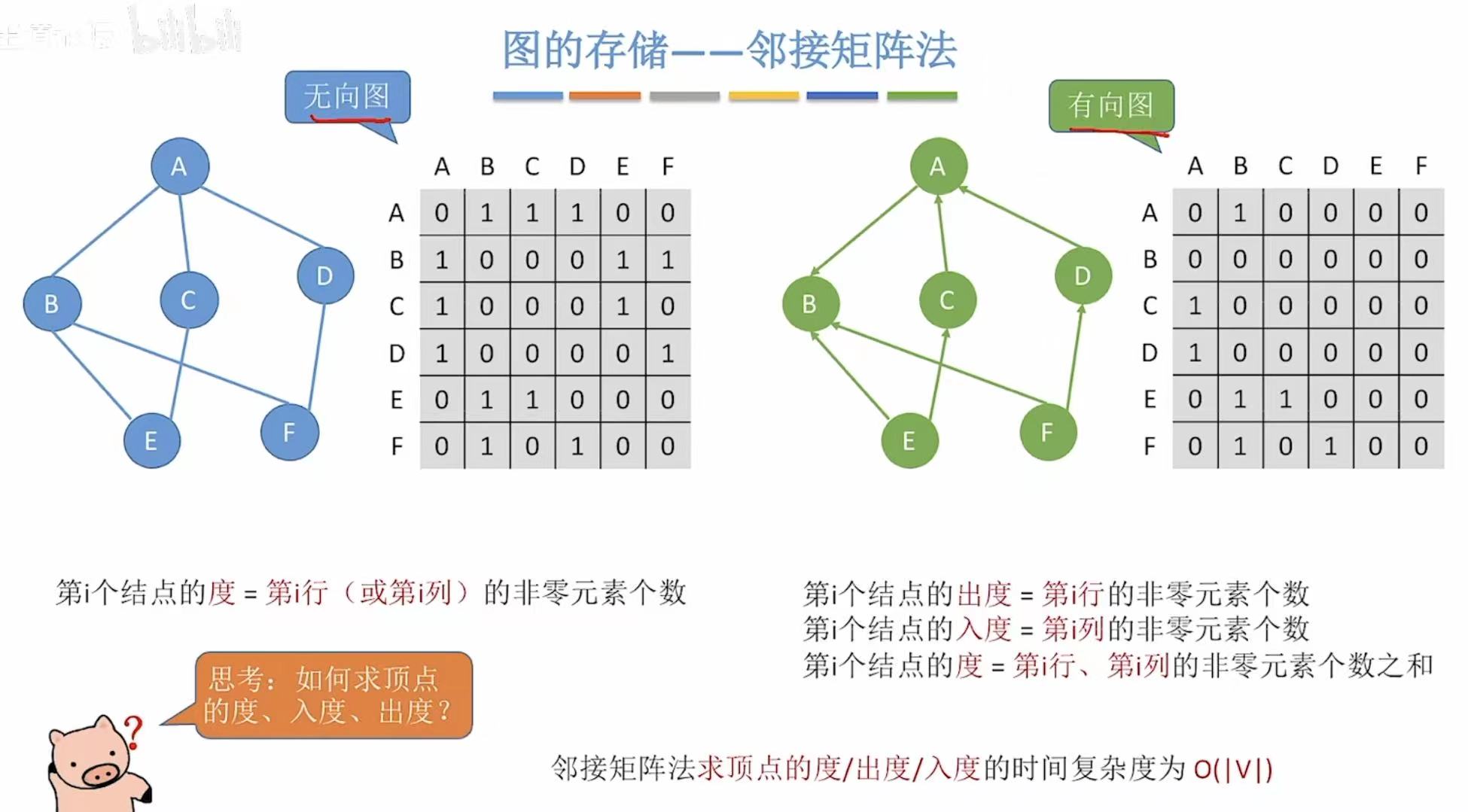
- 无向图:行或列的1的个数。
- 有向图 :出度-->行;入度-->列;
1.2 带权图
带权就可以将之前的0和1替换成∞和对应的权值。
java
#define MaxVertexNum 100 // 定义图中顶点数目的最大值(最多100个顶点)
#define INFINITY INT_MAX // 宏定义常量"无穷":用 int 类型的最大值表示不可达
// 在实际算法中(如 Dijkstra),若两点无路径,则设为 INF
typedef char VertexType; // 定义顶点的数据类型:这里用 char 表示顶点(如 'A', 'B')
// 可以改为其他类型(如 int、string 或结构体)
typedef int EdgeType; // 定义边的权值类型:这里用 int 表示边的权重(如距离、代价等)
// 也可以是 float、double 等
typedef struct {
VertexType Vex[MaxVertexNum]; // 顶点表:存储所有顶点的信息
// 比如 Vex[0]='A', Vex[1]='B', ...
EdgeType Edge[MaxVertexNum][MaxVertexNum]; // 邻接矩阵:存储边的权值
// Edge[i][j] 表示从顶点 i 到顶点 j 的边权
// 如果没有边,则设为 INFINITY(表示"无穷大")
int vexnum, arcnum; // 图的当前实际顶点数和边数(弧数)
// vexnum:实际使用的顶点数量
// arcnum:实际存在的边的数量
} MGGraph;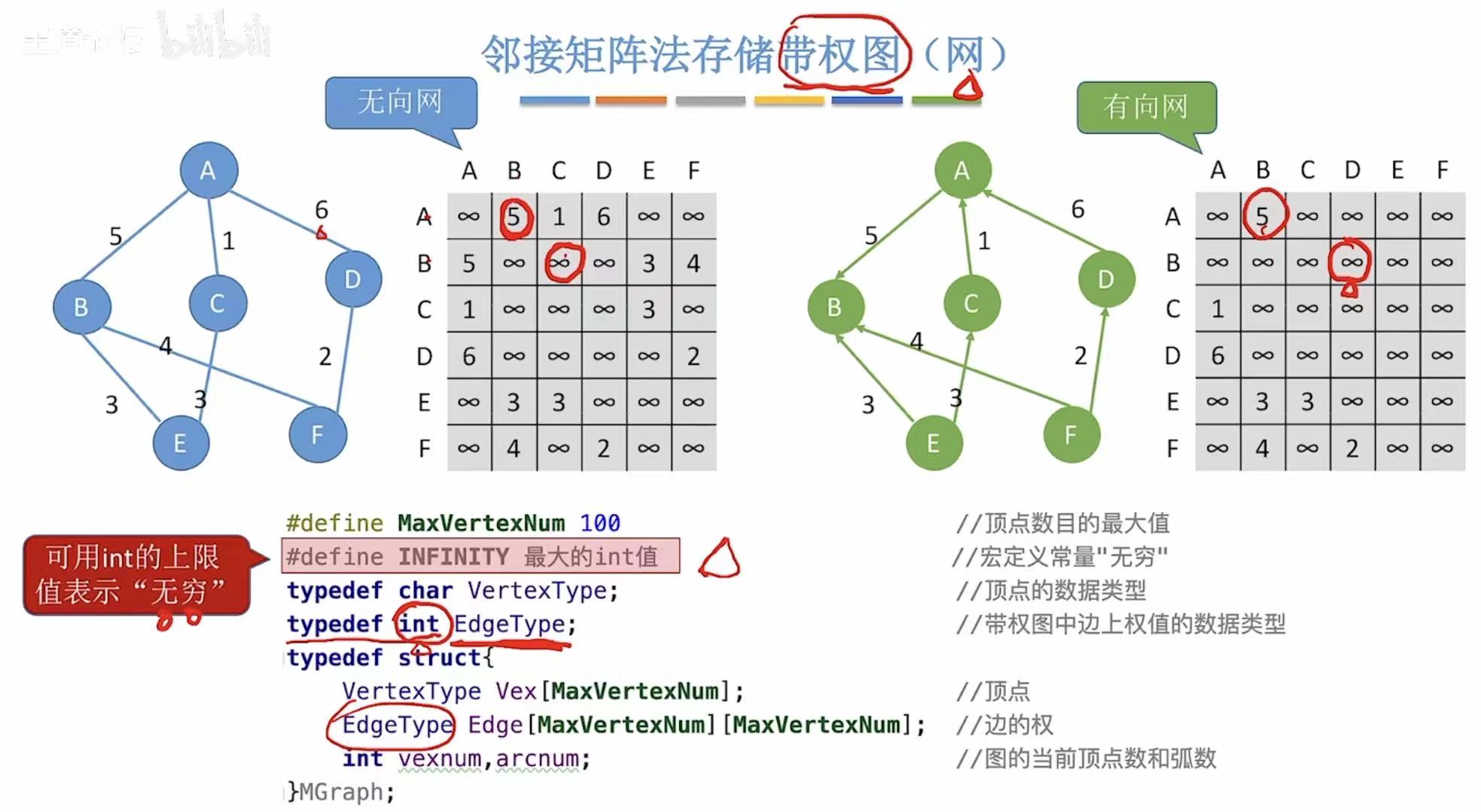
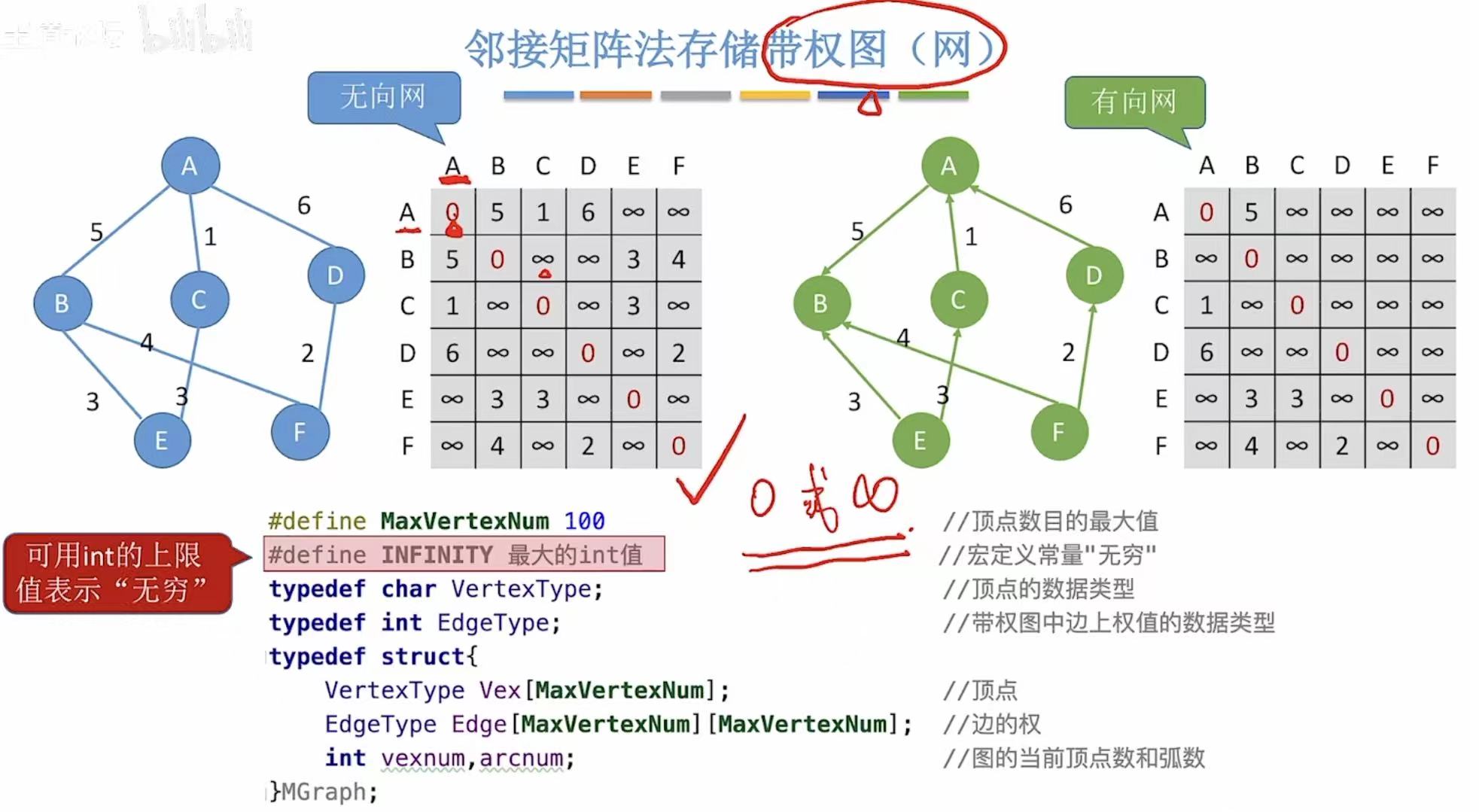
因为研究的是简单图,所以根本不可能出现自己指回自己的情况,所以也可以用0表示这种情况。
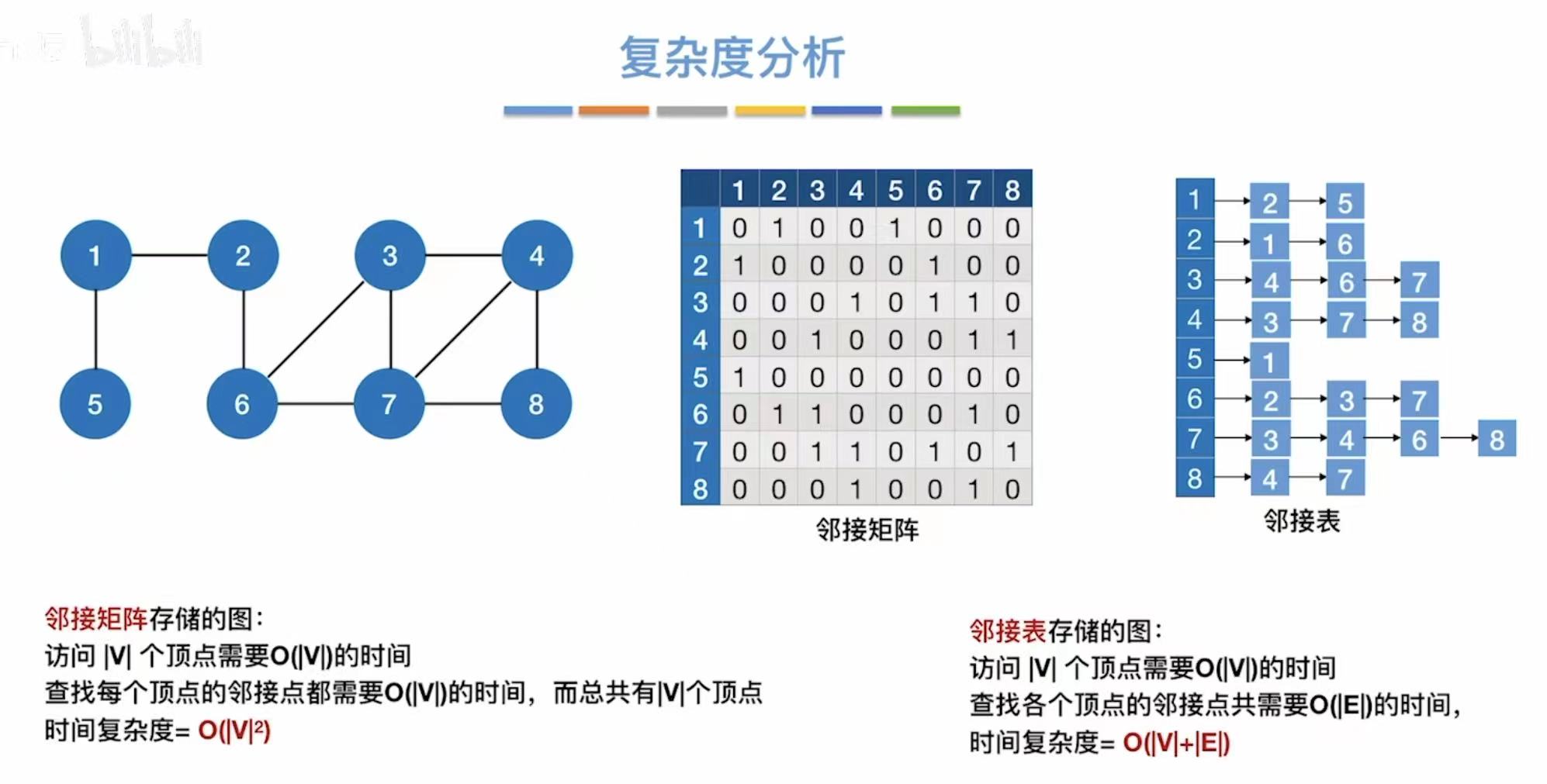
1.3 性能分析
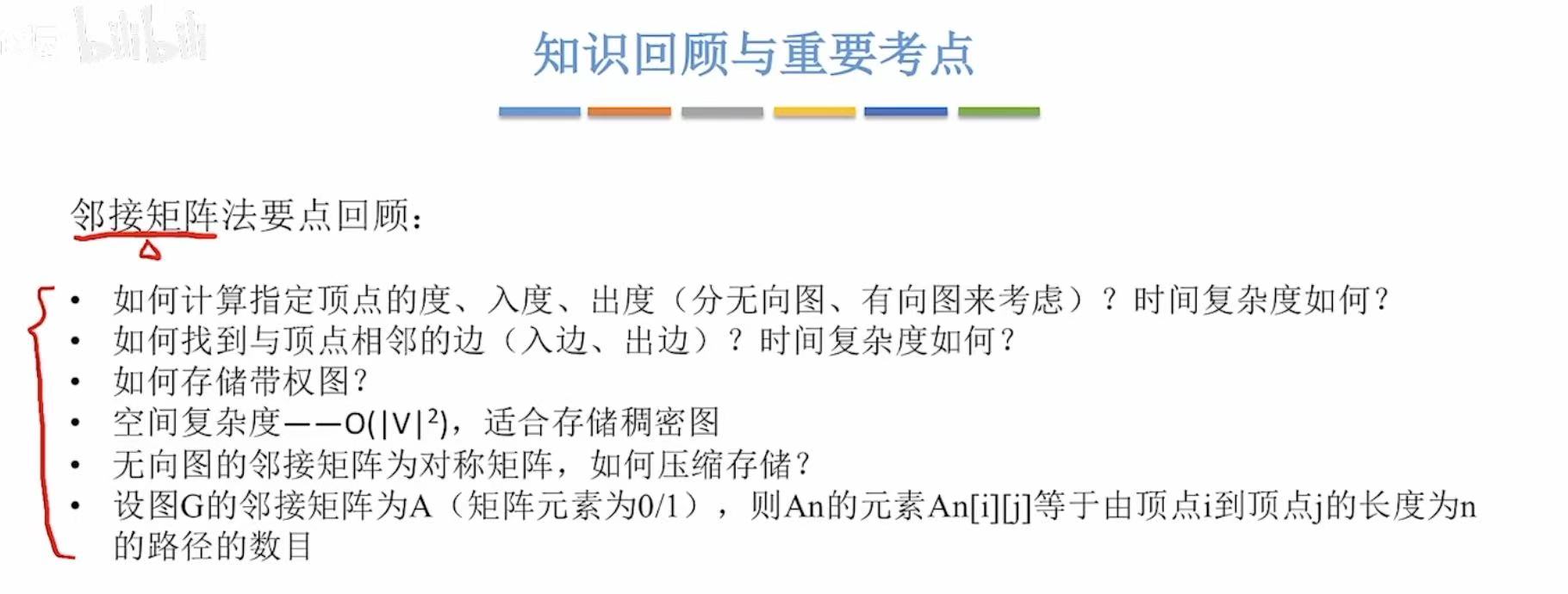
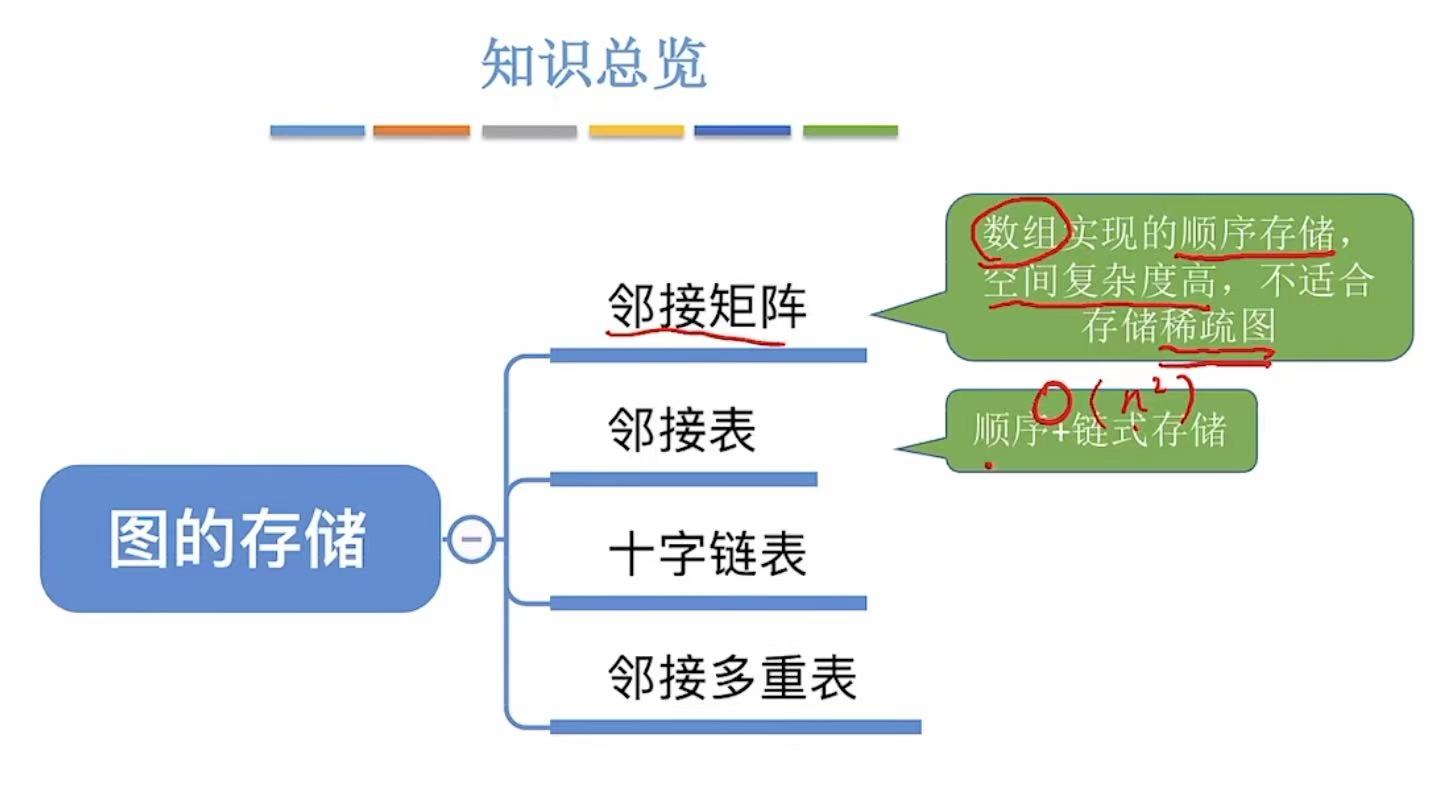
因为邻接矩阵存的都是顶点,所以空间复杂度自然就和顶点相关。
|v2|:可以理解为这个邻接矩阵的大小。
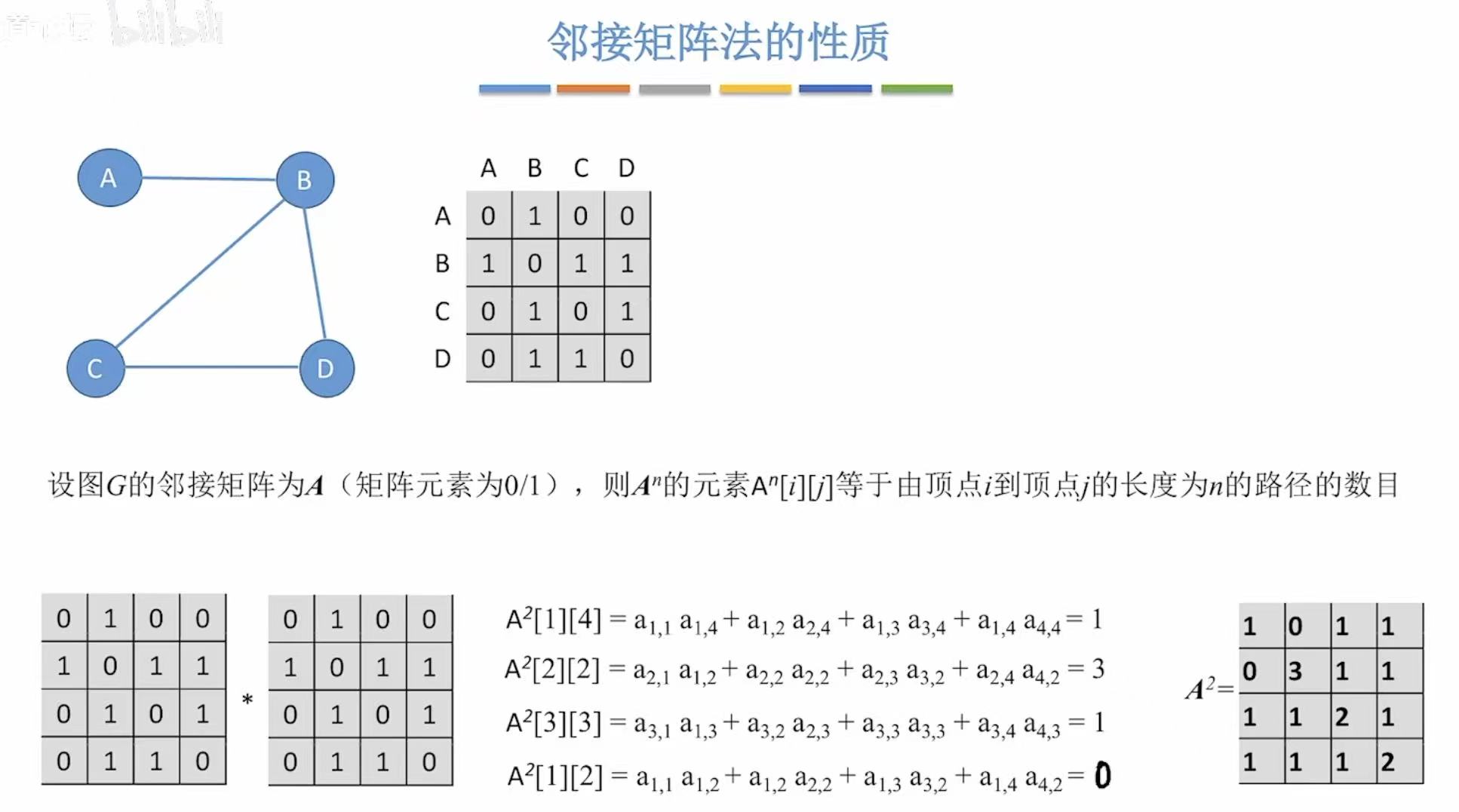
1.4 性质
Aij = 1 表示有边从 i 到 j;
Aij = 0 表示无边。
A²14(即从顶点 1 到顶点 4,长度为 2 的路径数)
- k=1:1→1?没有(A11=0)
- k=2:1→2(有),2→4(有) → 路径:1→2→4
- k=3:1→3?没有(A13=0)
- k=4:1→4?没有(A14=0)
- 只有一条路径:1→2→4 --> 所以 A²14 = 1
1.5 小结
2. 邻接表
2.1 概念
java
// 定义最大顶点数(常量)
#define MaxVertexNum 100 // 图中顶点数目的最大值
// 边(或弧)结点结构体:用于存储边的信息
typedef struct ArcNode {
int adjvex; // 表示该边指向的顶点在数组中的下标(即邻接点)
// 例如:A→B,则 adjvex = 1(B 的索引)
struct ArcNode *next; // 指向下一个边结点的指针(形成链表)
// 实现同一顶点的所有邻接点按链表连接
// InfoType info; // 可选:存储边的权值或其他信息(如权重、距离等)
} ArcNode;
// 顶点结点结构体:用于存储顶点及其邻接表
typedef struct VNode {
VertexType data; // 存储顶点的数据(如字符 'A'、'B' 等)
// 可以是 char、int 或更复杂类型
ArcNode *first; // 指向该顶点第一条边(或弧)的指针
// 即:该顶点的邻接表头指针
} VNode, AdjList[MaxVertexNum]; // VNode 是结点类型,AdjList 是顶点数组
// 图的整体结构体:ALGraph(Adjacency List Graph)
typedef struct {
AdjList vertices; // 顶点数组:存储所有顶点和它们的邻接表
// vertices[i] 就是第 i 个顶点的 VNode 结构
int vexnum, arcnum; // 图的当前实际顶点数和边数(弧数)
// vexnum:实际使用的顶点数量
// arcnum:实际存在的边的数量
} ALGraph;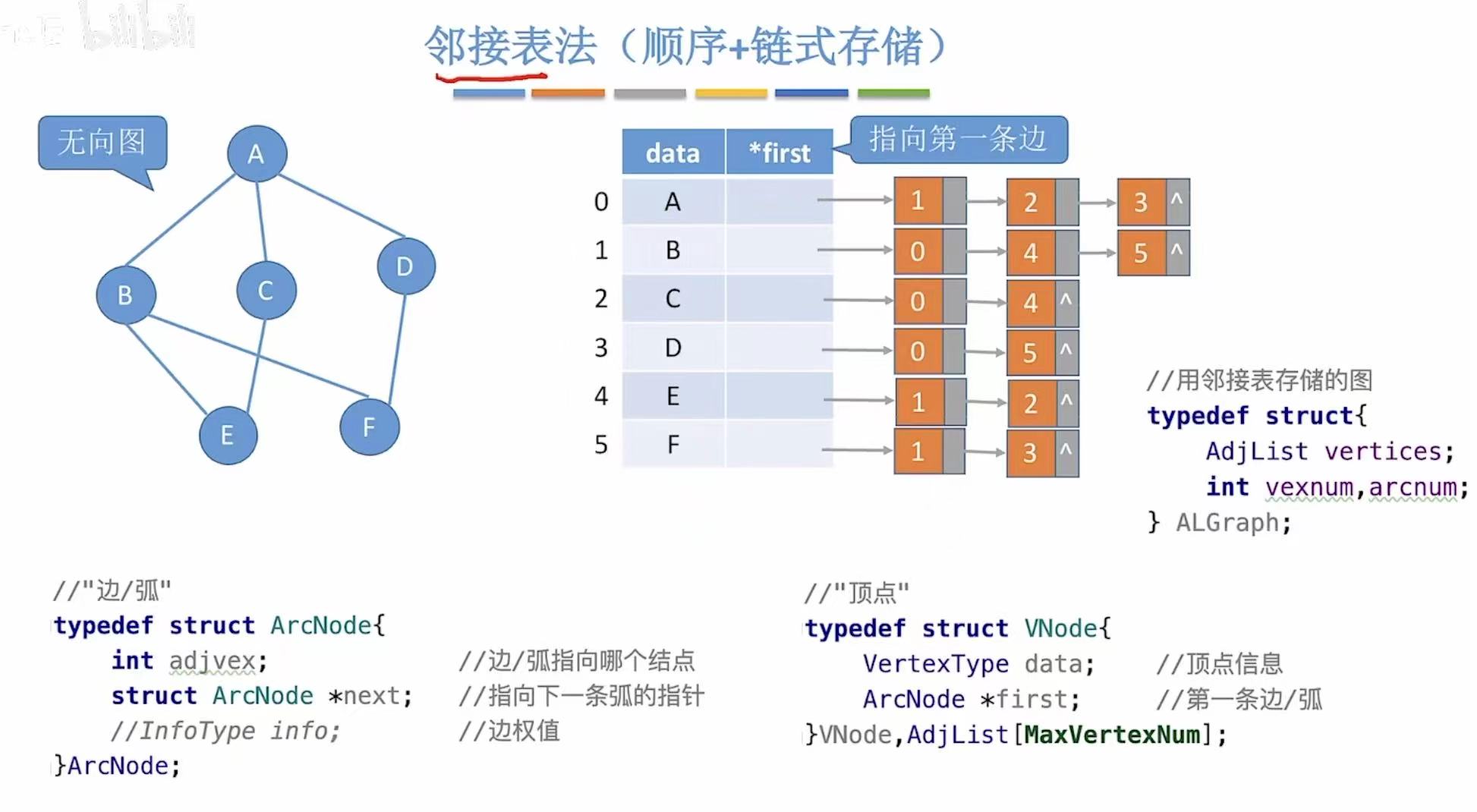
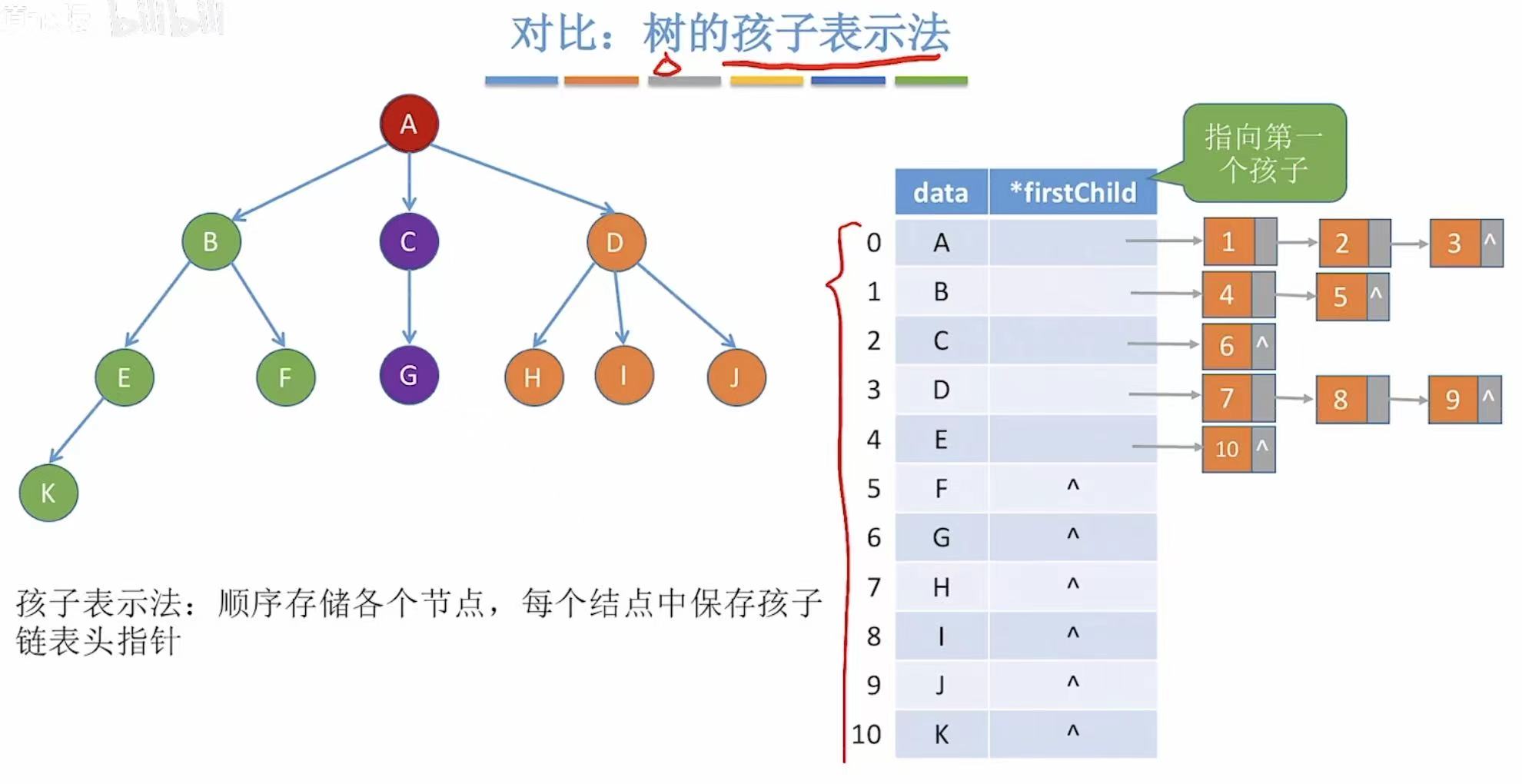
类比树的孩子表示法,具体可见:孩子表示法
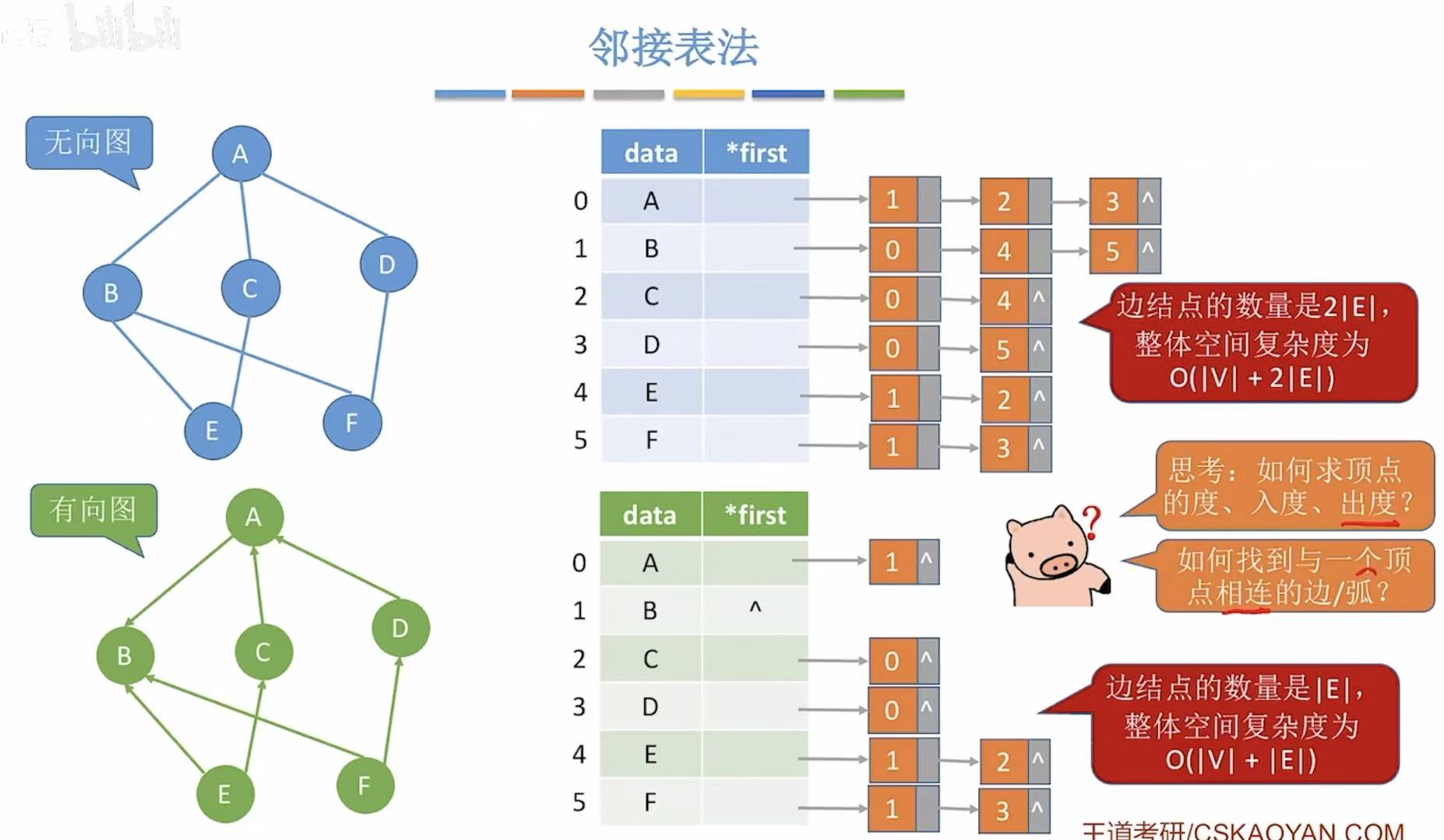
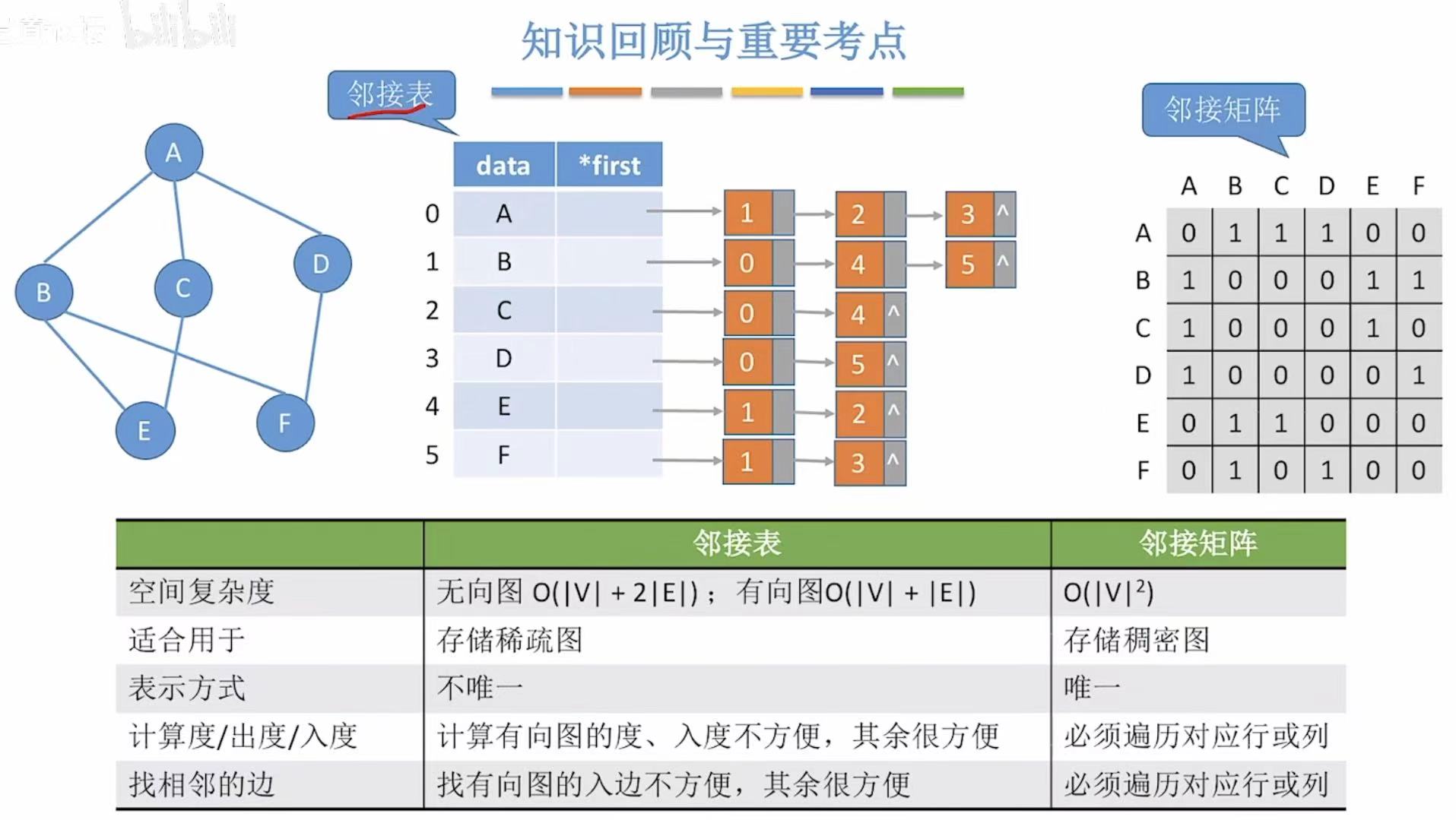
空间复杂度:
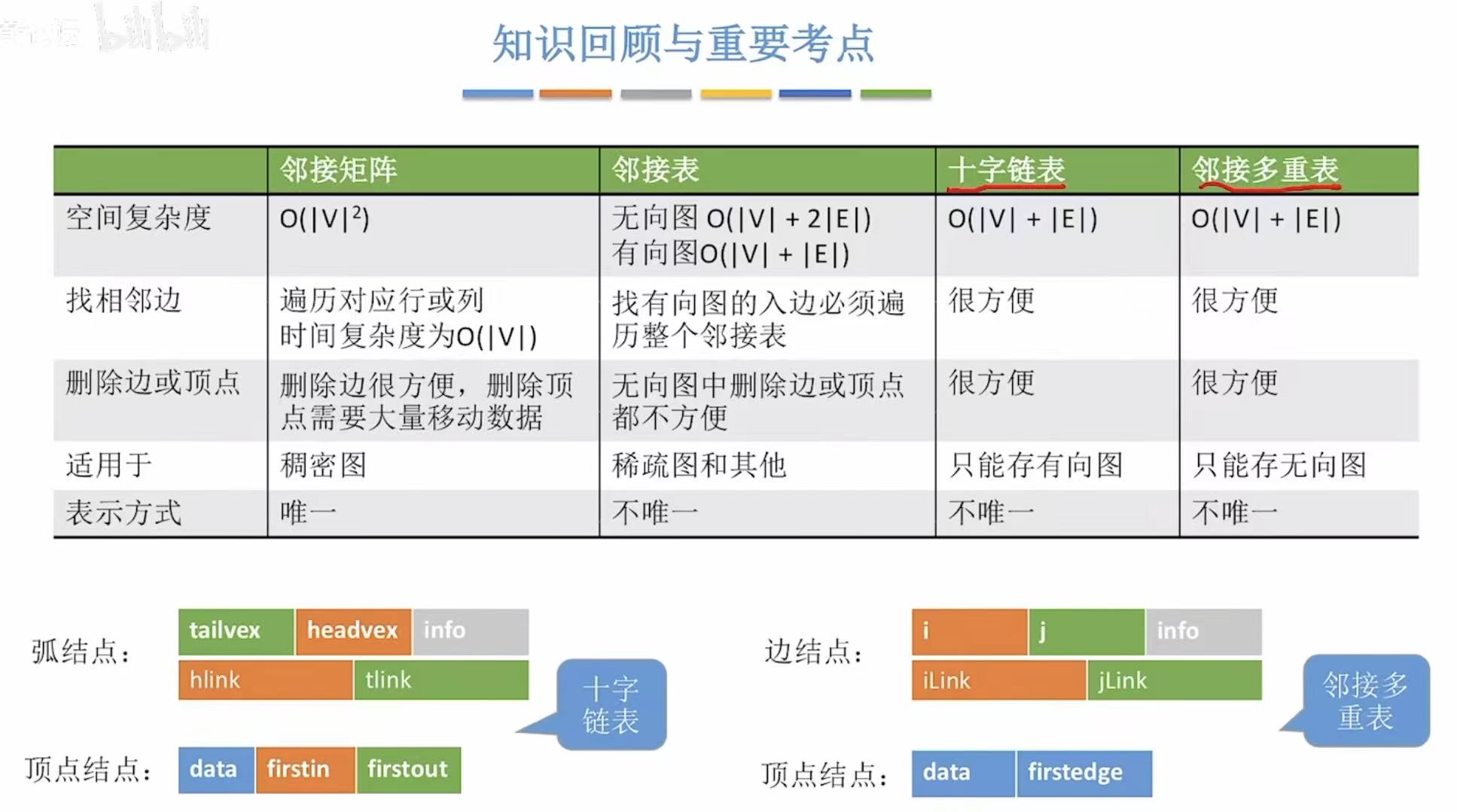
- 无向图:直接看这个表=顶点|V|+双倍的边2|E|
- 有向图 :也是直接看表=顶点|V|+边|E|
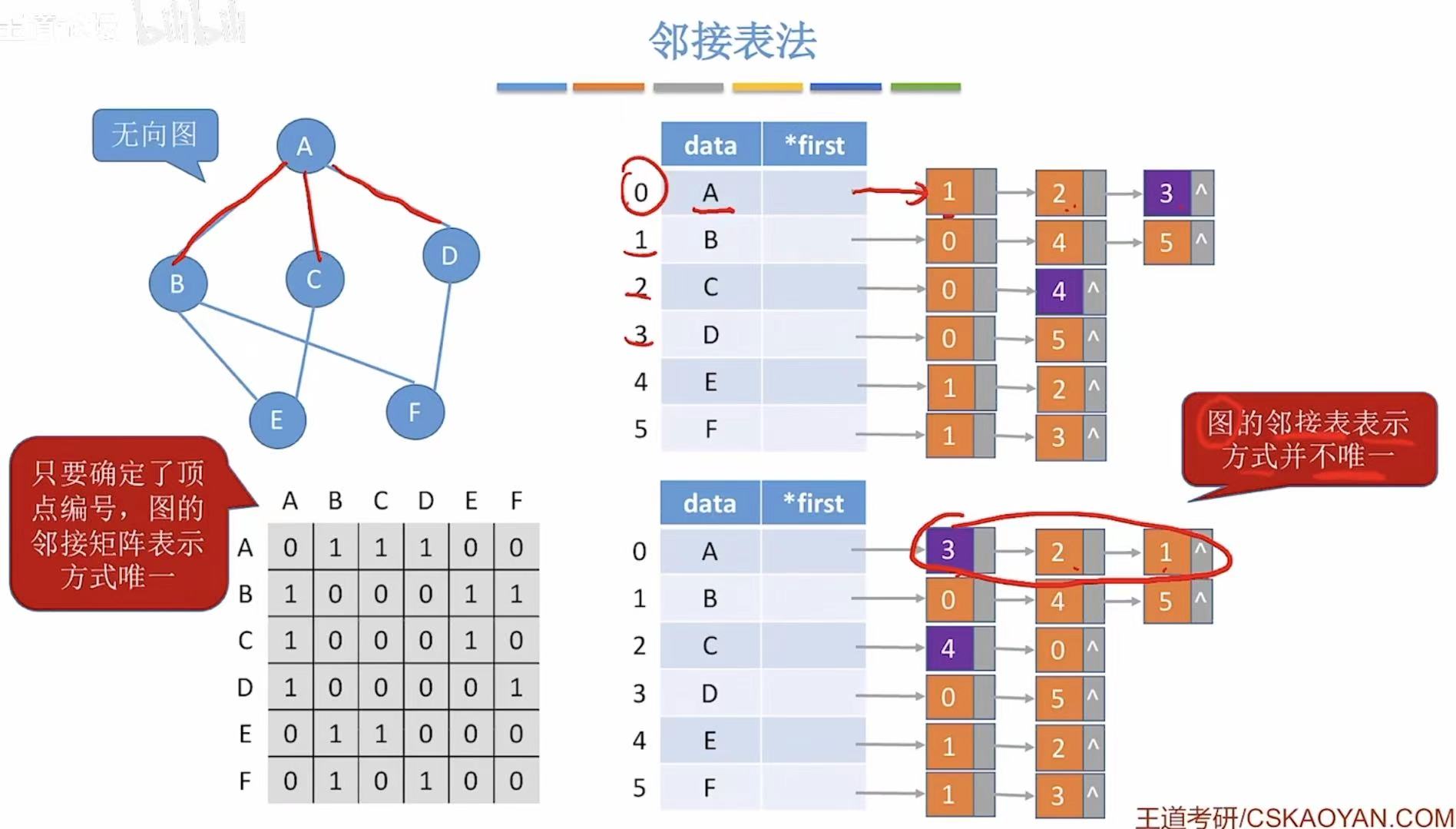
- 邻接矩阵:因为就0和1来表示,顶点都是按字母顺序排列的,所以表示方式唯一。
- 邻接表:因为后面用链表链接的序号可以随意排序,所以表示方式并不唯一。
2.2 小结
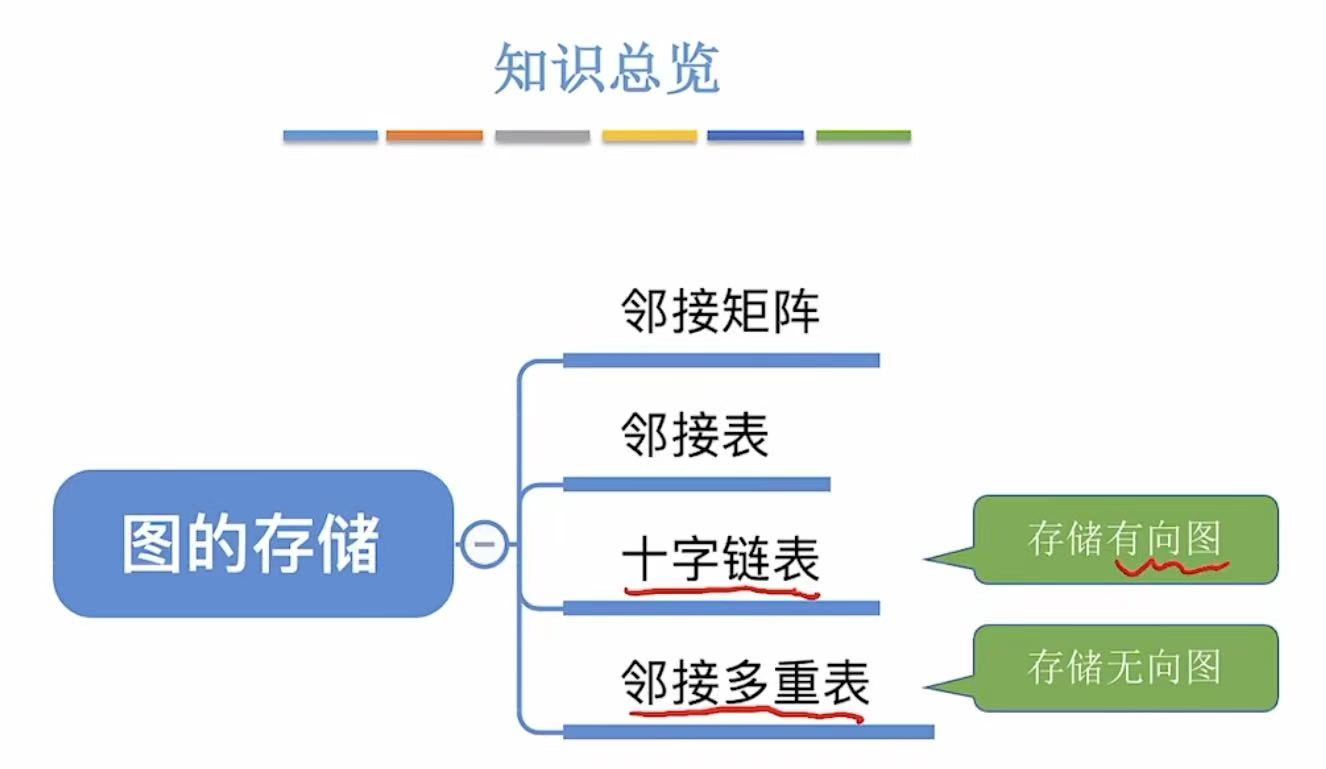
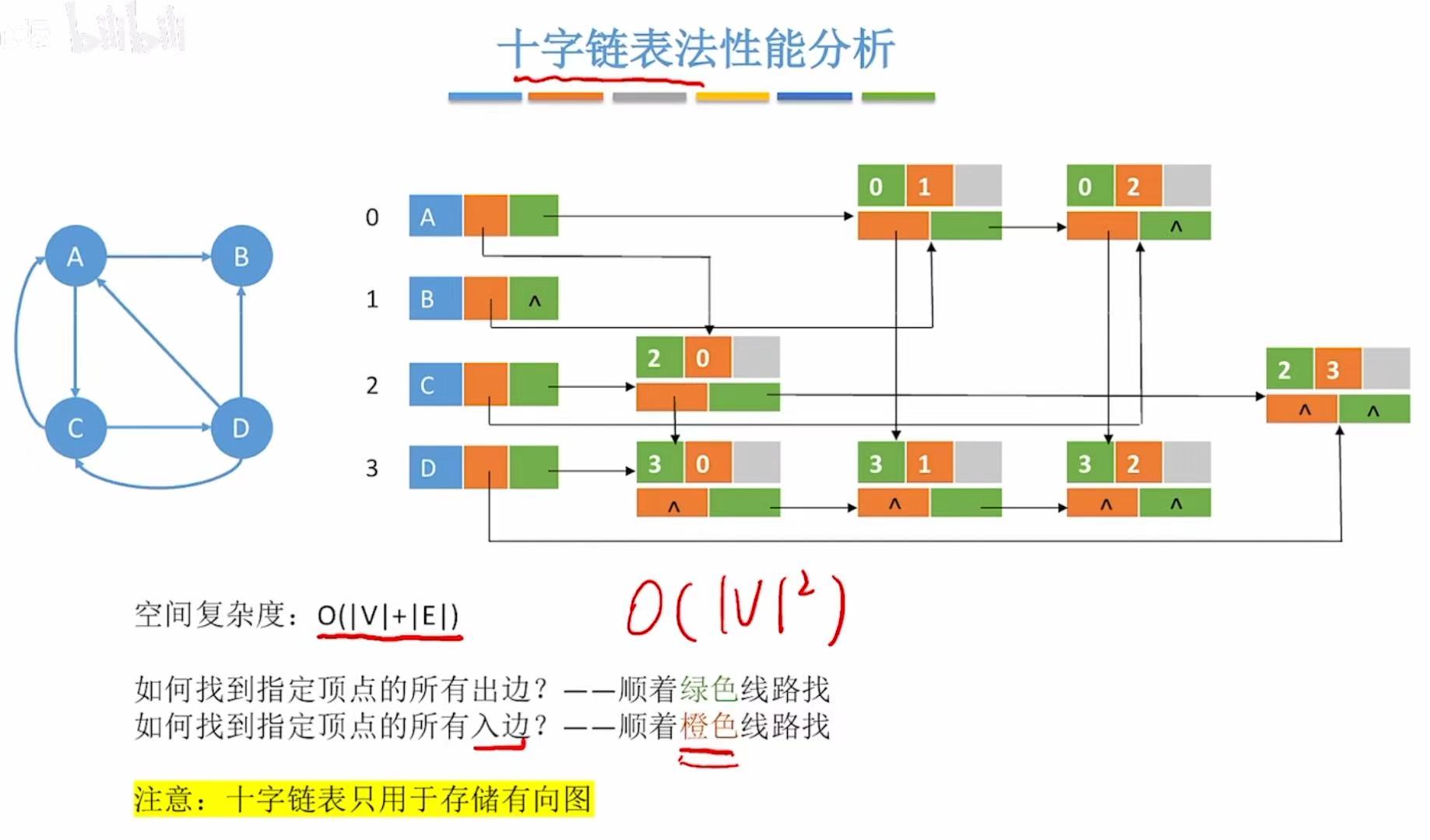
3. 十字链表法
前两种存储方式的缺点:
- 邻接表:和树的孩子表示法相同的缺点,都是data不好找。
- 邻接矩阵:因为直接是一个这么宽的表,太浪费空间了。
全新优化版-->十字链表法: - 空间复杂度:ABCD-->顶点|V|+01、02...七个长方形对应七个边-->|E|
- 橙色:别人指向自己
- 绿色:自己指向别人
对比之前:
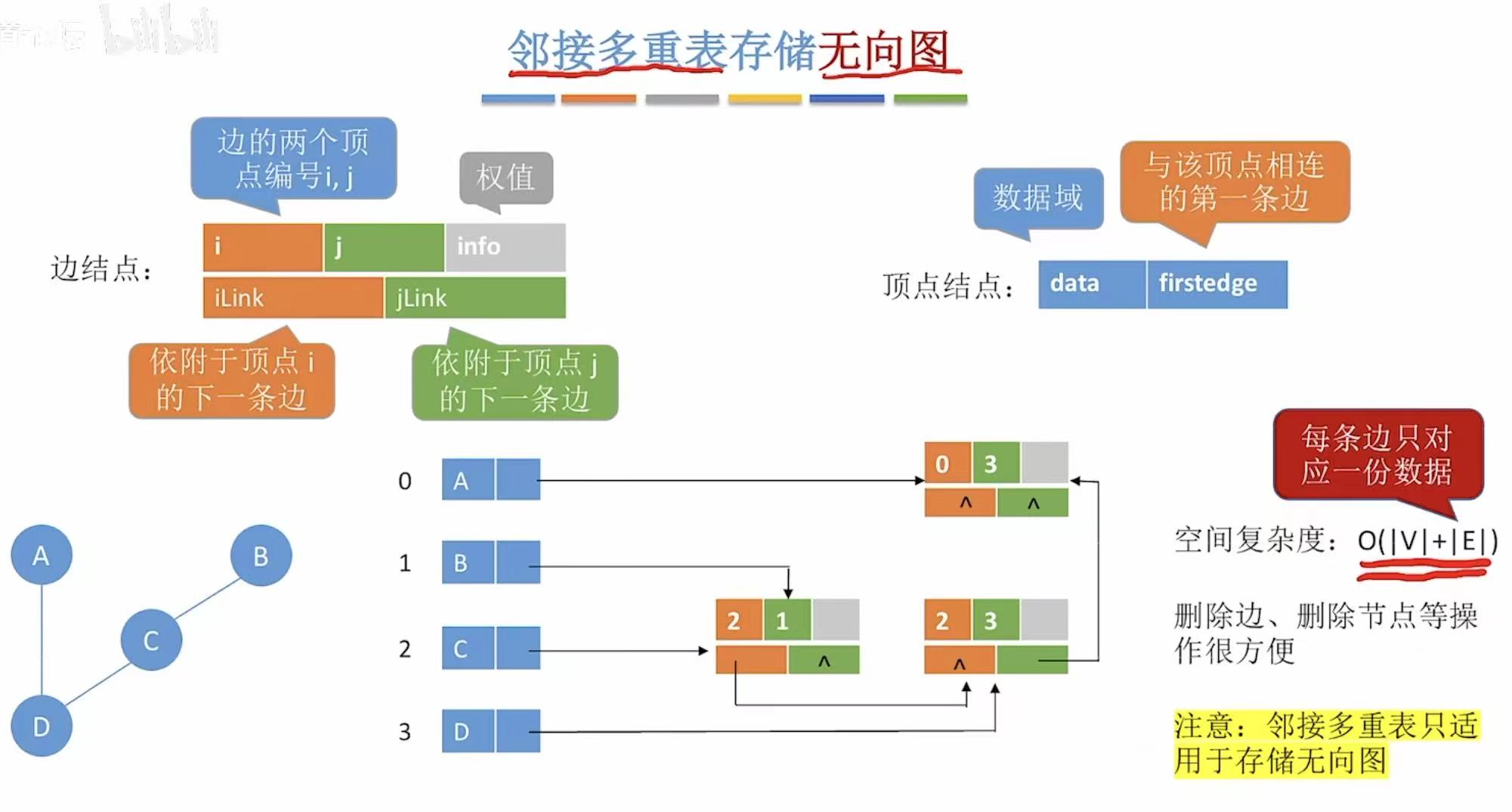
4. 邻接多重表
因为用来存无向图,所以顶点后面就不需要分橙or绿了。
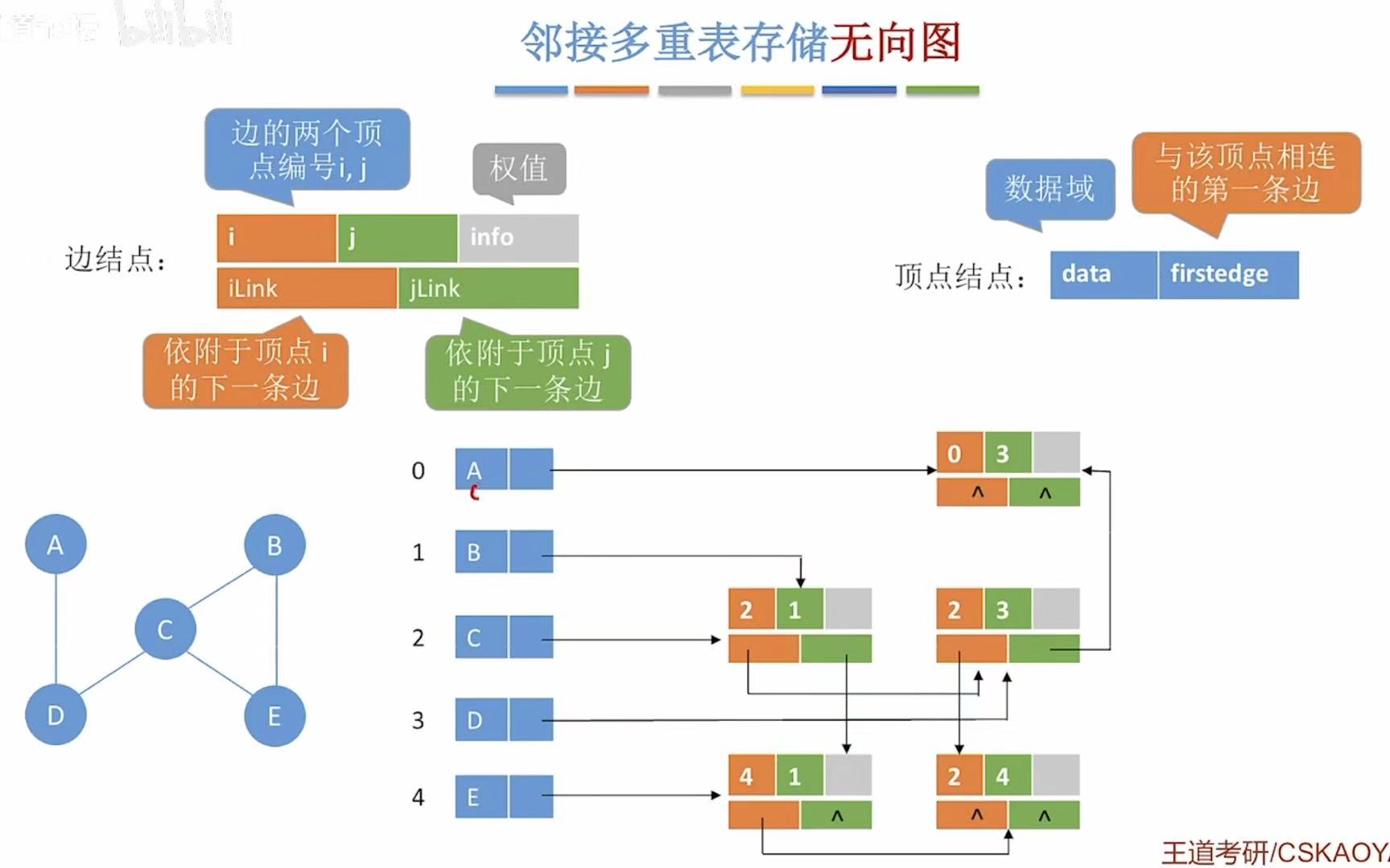
空间复杂度:ABCD-->顶点|V|+三个边-->|E|
图的基本操作
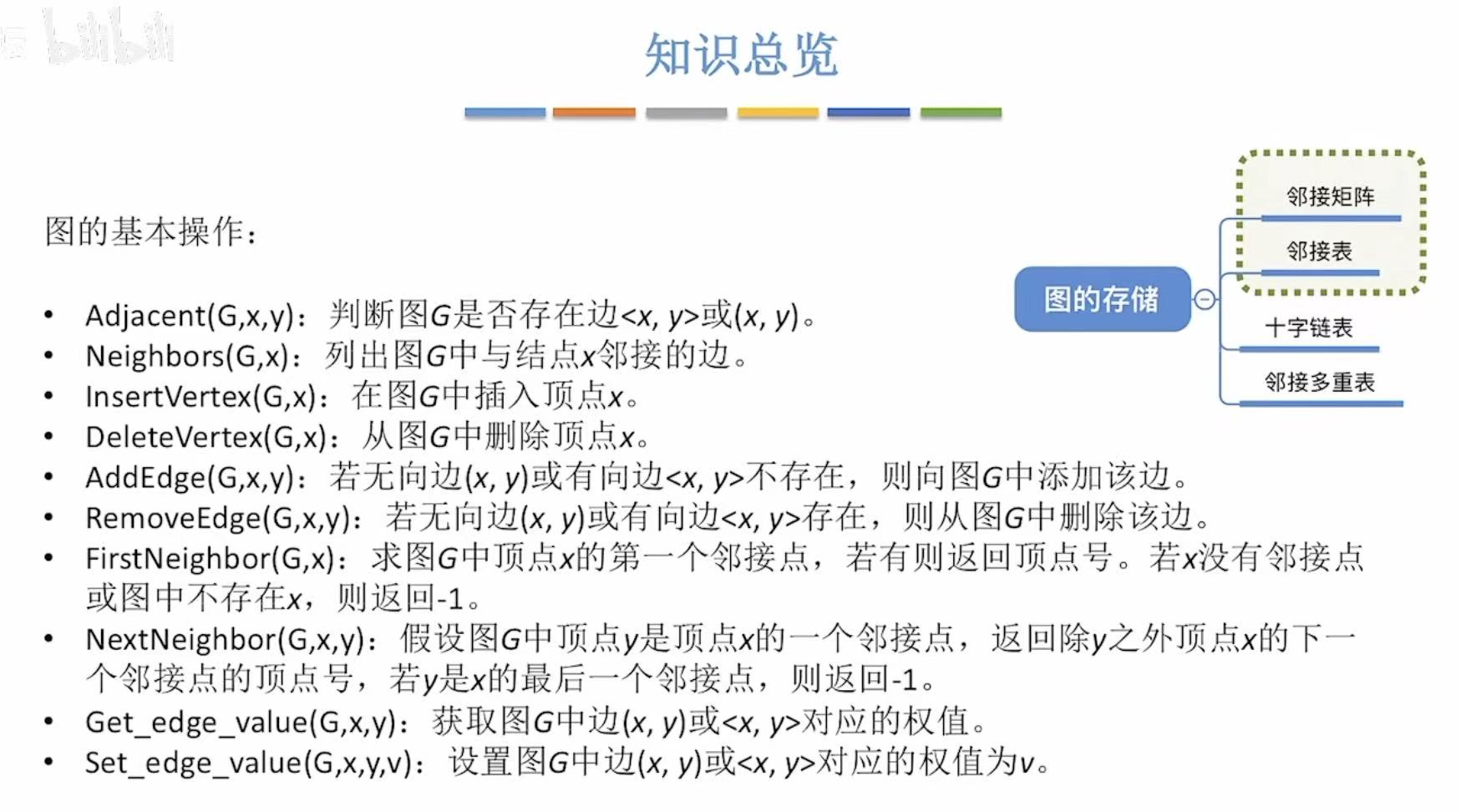
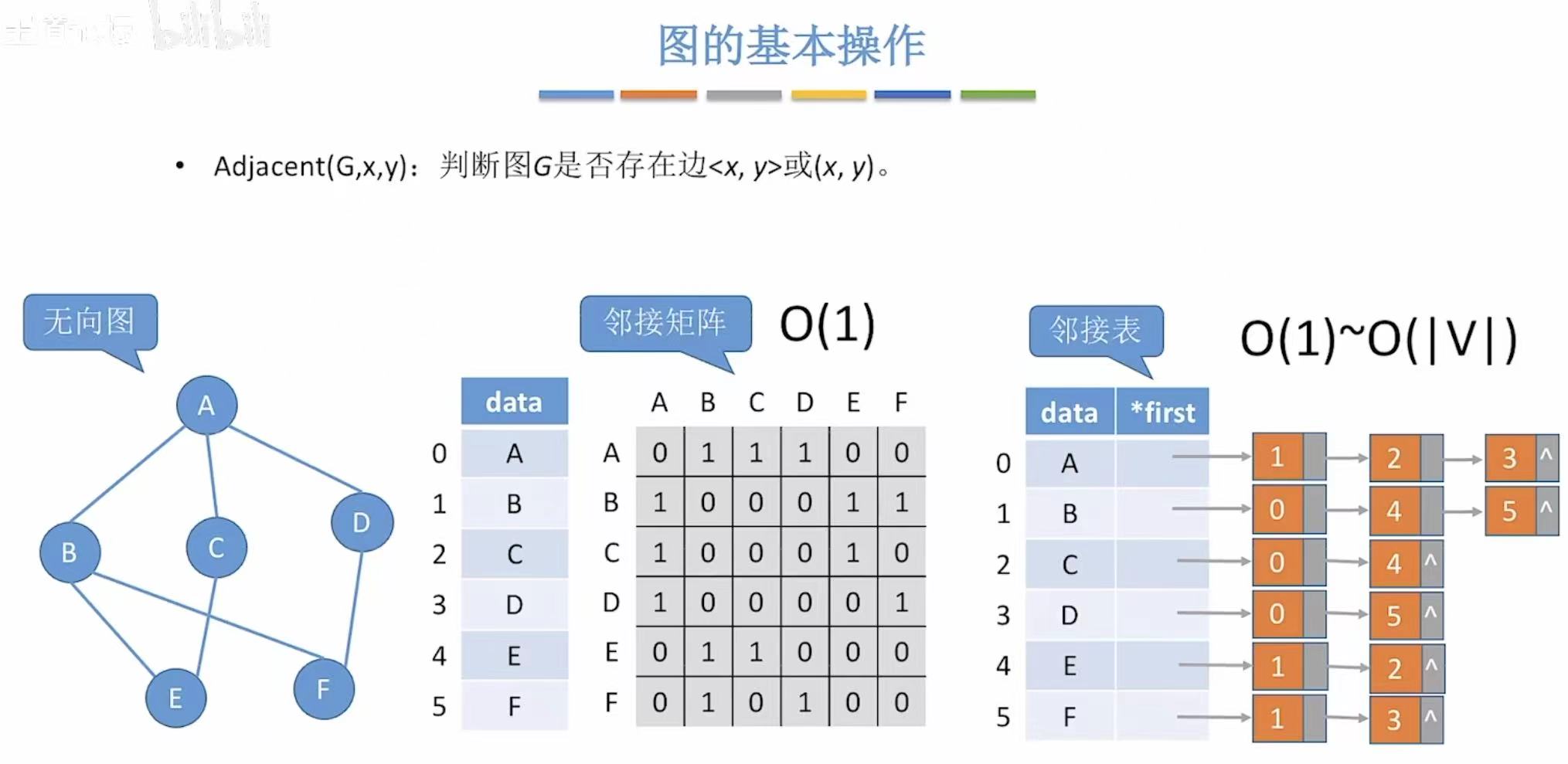
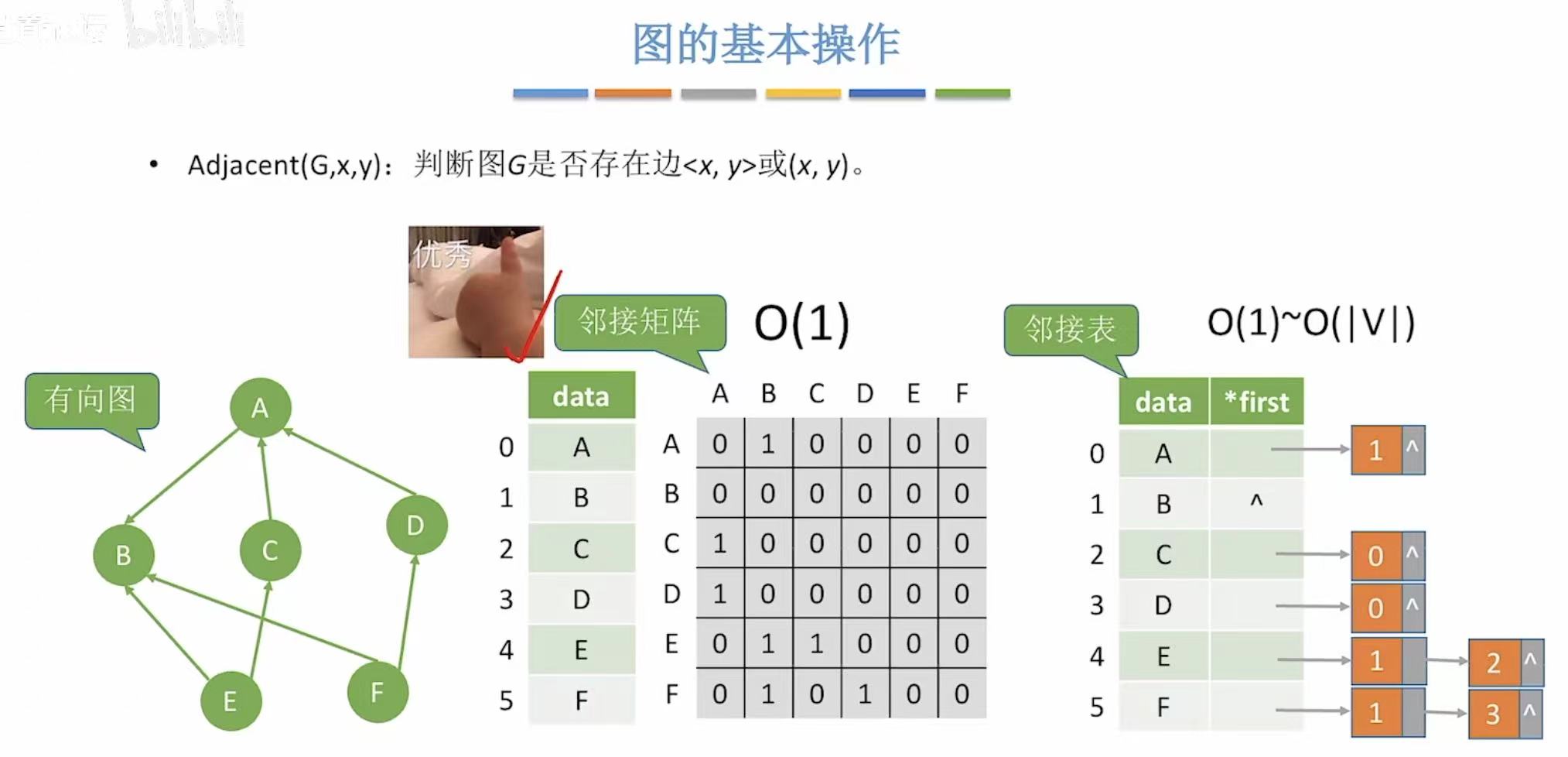
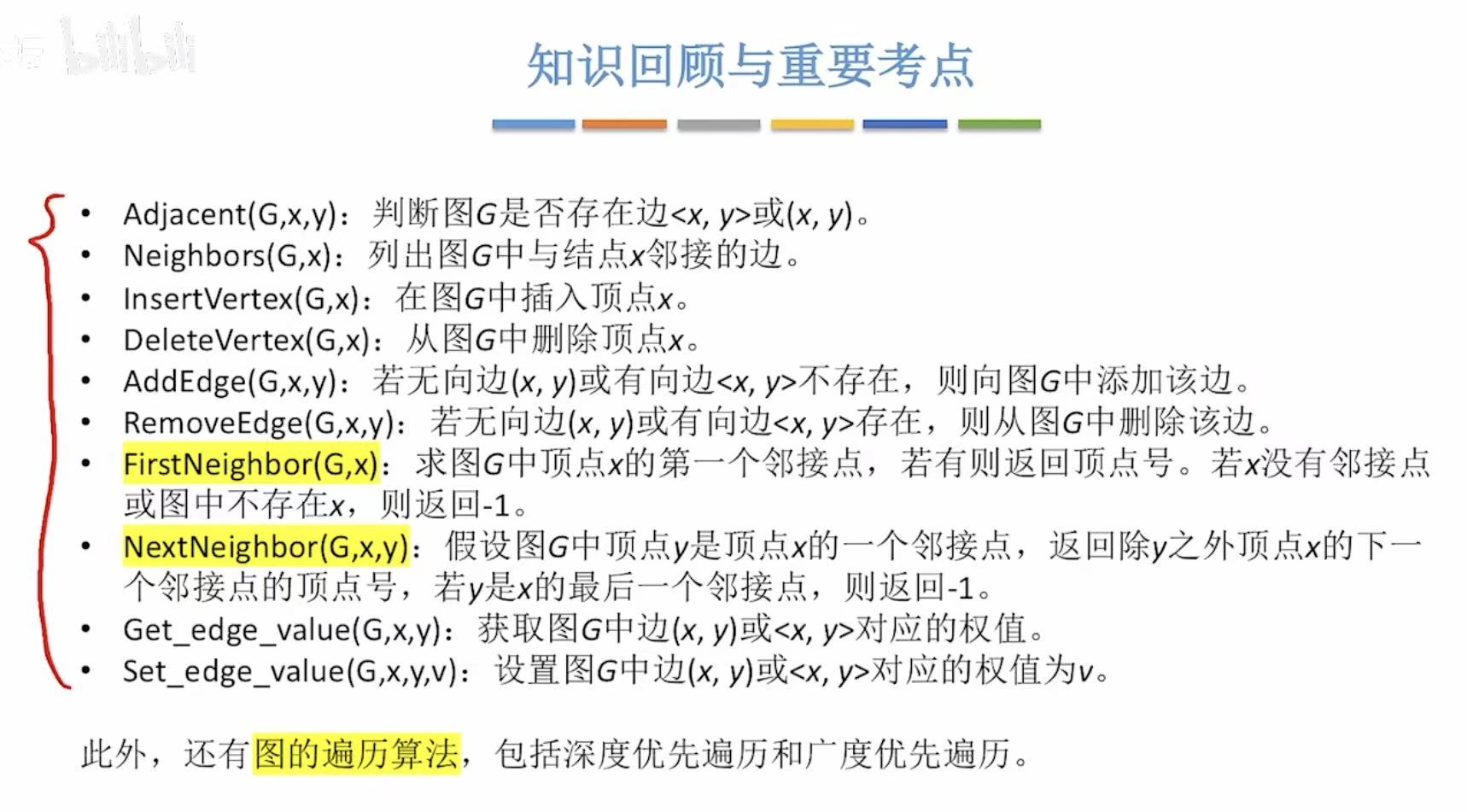
1. Adjavent-->边存在
- 邻接矩阵:看这个两个顶点相交的位置是1是0
- 邻接表:看其中一个顶点后面有没有连着另外一个顶点的编号
无向图:
有向图:
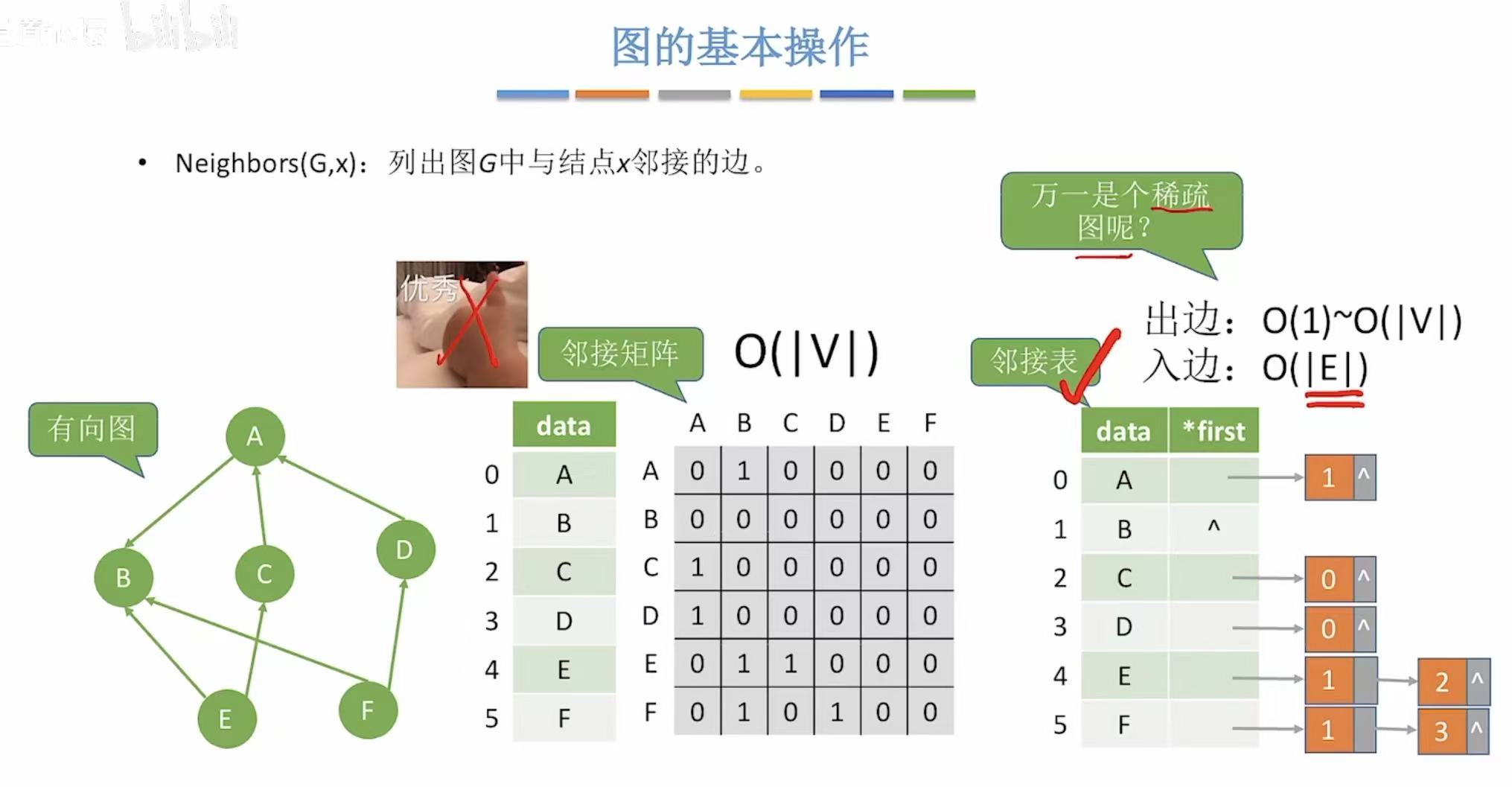
2. Neighbors-->邻接边
- 邻接矩阵:这个顶点在的这一行有几个1,都是和谁相交有1
- 邻接表:这个顶点后面都和谁相连
无向图:

有向图:
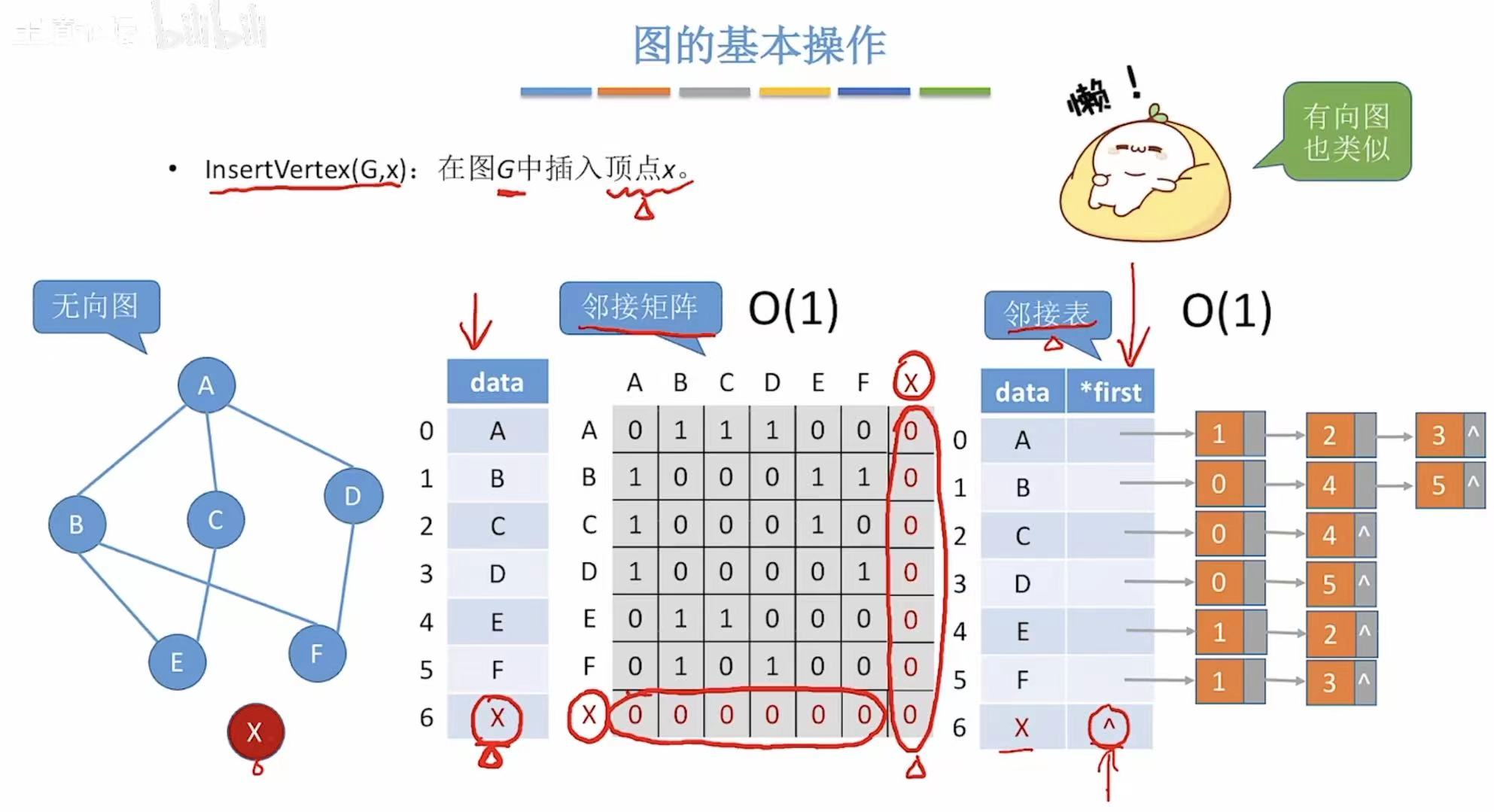
3. InsertVertex-->插入点
相当于往下初始化一个顶点。
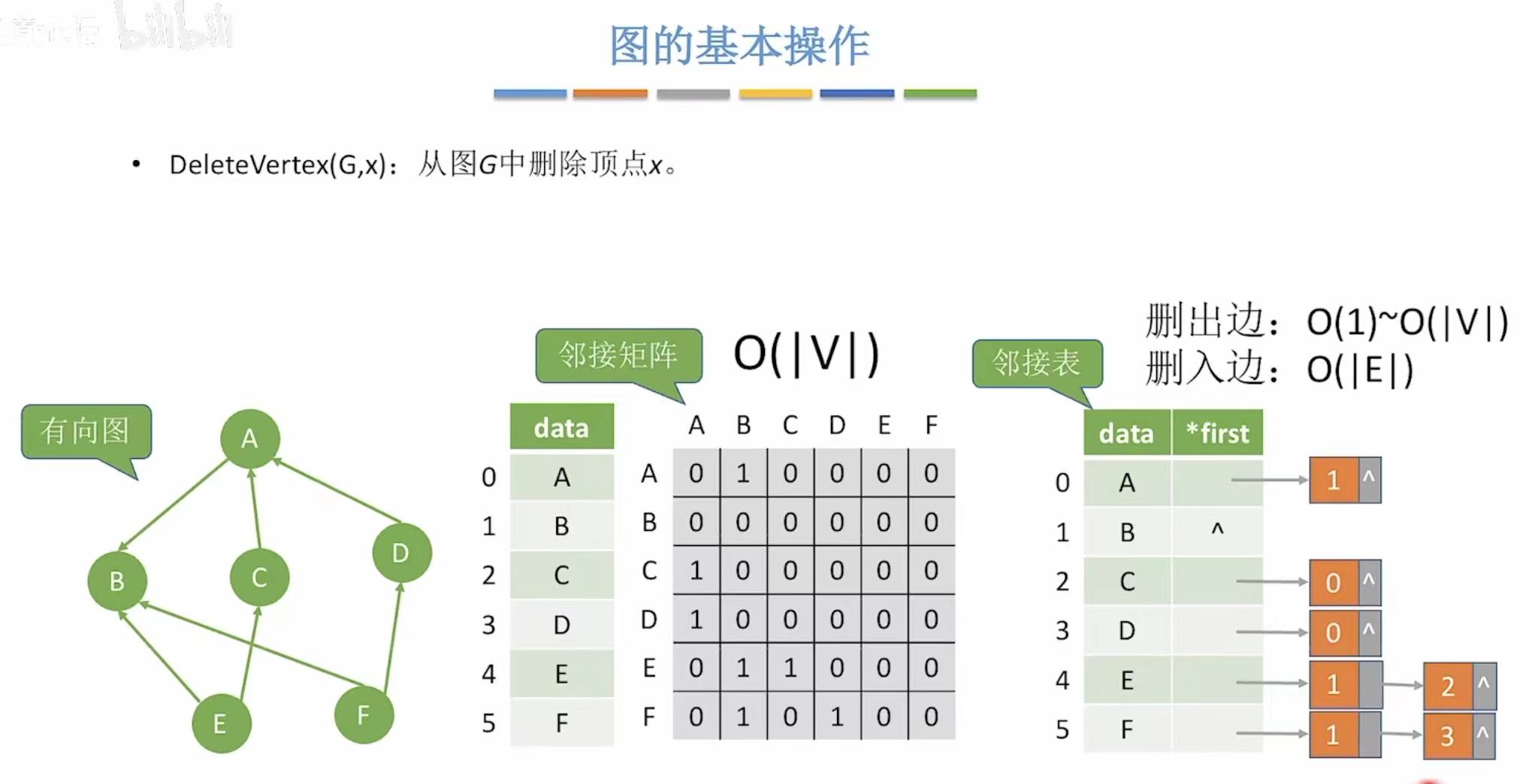
4. DeleteVertex-->删除点
就是从逻辑上(看起来是这样,但其实还存着,不过新数据可能会给它覆盖掉)把这个点删除。

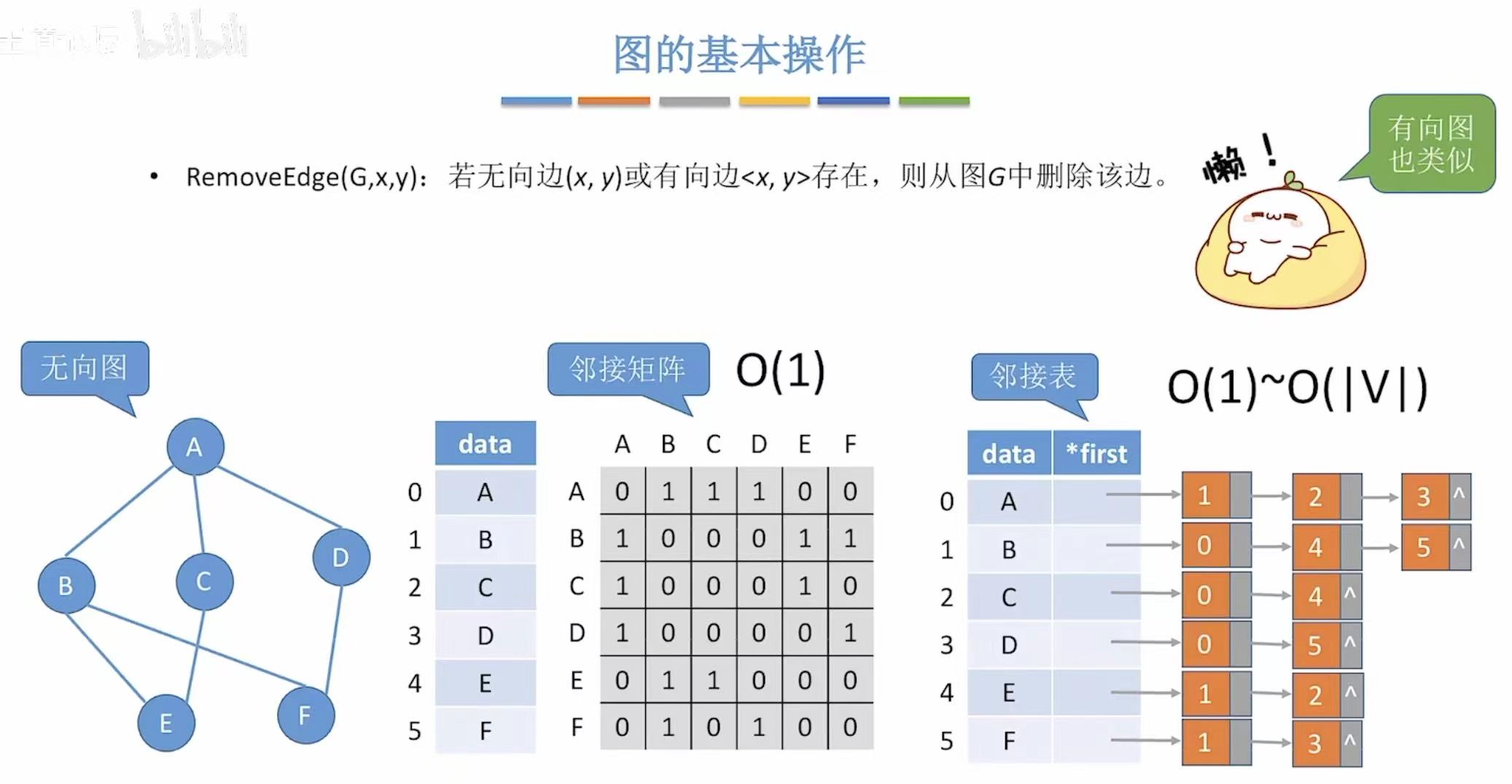
5. RemoveEdge-->删除边
- 邻接矩阵:相交的点置为0
- 邻接表:后面相连的直接砍掉
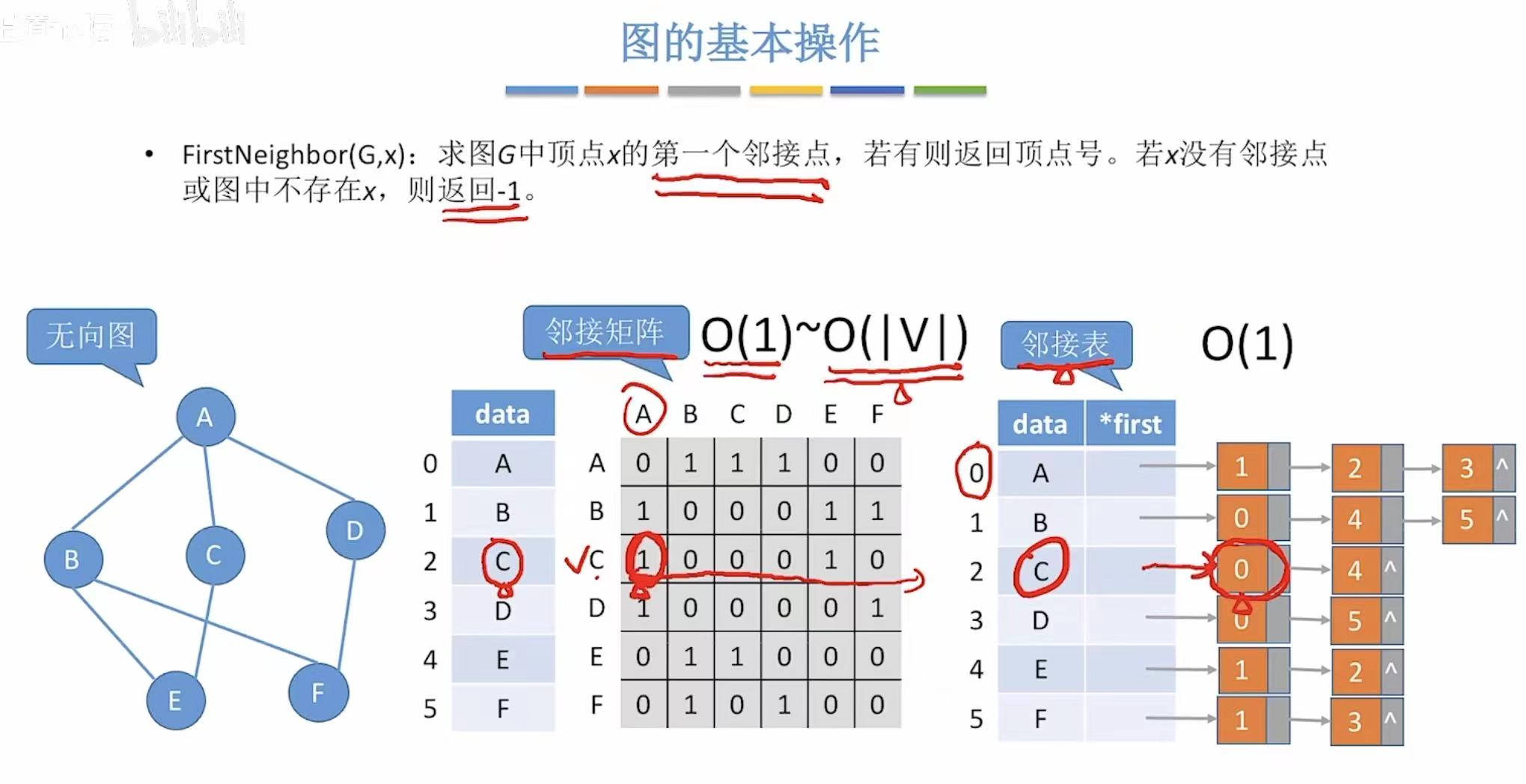
6. FirstNeighbor-->第一个邻接点
- 邻接矩阵:一行中从左往右看到的第一个1
- 邻接表:与表格直接相连的长方形
无向图:
有向图:

7. NextNeighbor-->下一个邻接点
邻接矩阵:
- 从列 y+1 开始,向右扫描第 x 行;
- 找到第一个 Axj == 1 的列 j;
- 返回 j(即下一个邻接点);
- 如果找不到,返回 -1(表示无更多邻接点)。
- NextNeighbor(2, 1) → 从列2开始找,第一个1在列3 → 返回3
邻接表:
- 遍历顶点 x 的邻接链表;
- 找到 adjvex == y 的那个 ArcNode 节点;
- 返回该节点的 next->adjvex(如果 next 存在);
- 否则返回 -1。

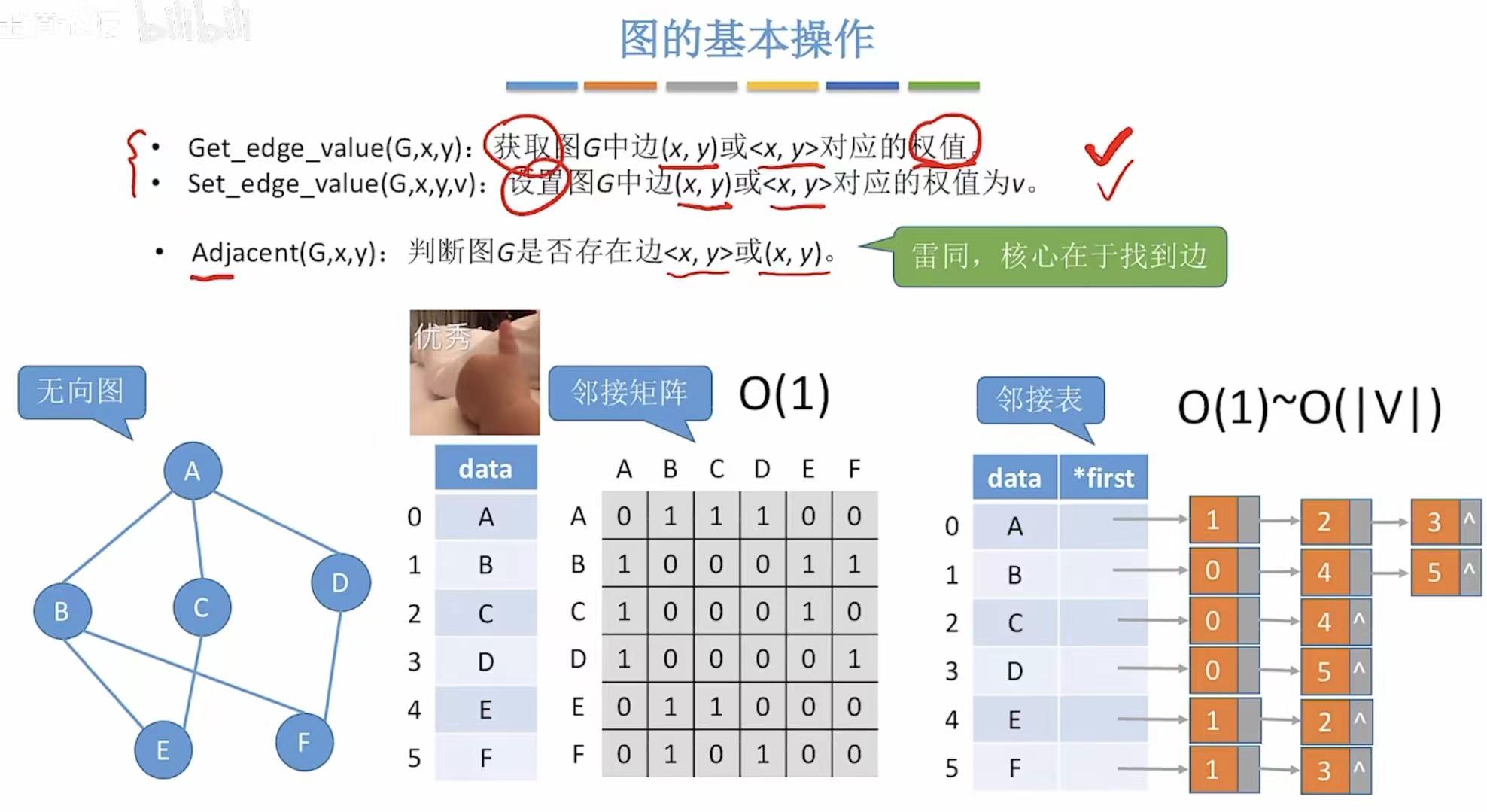
8. 获取/设置权值
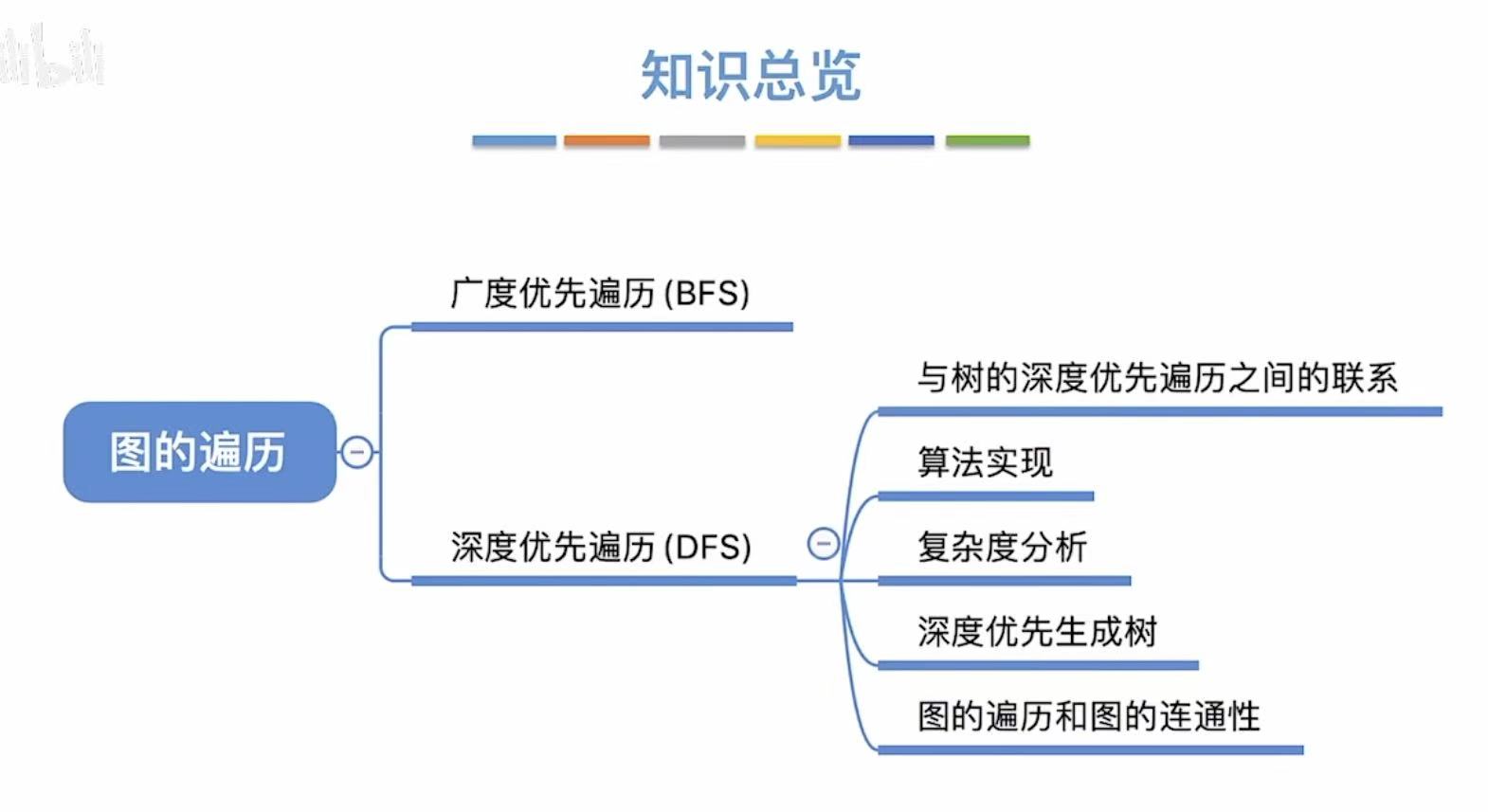
图的遍历
1. 广度优先遍历(BFS)
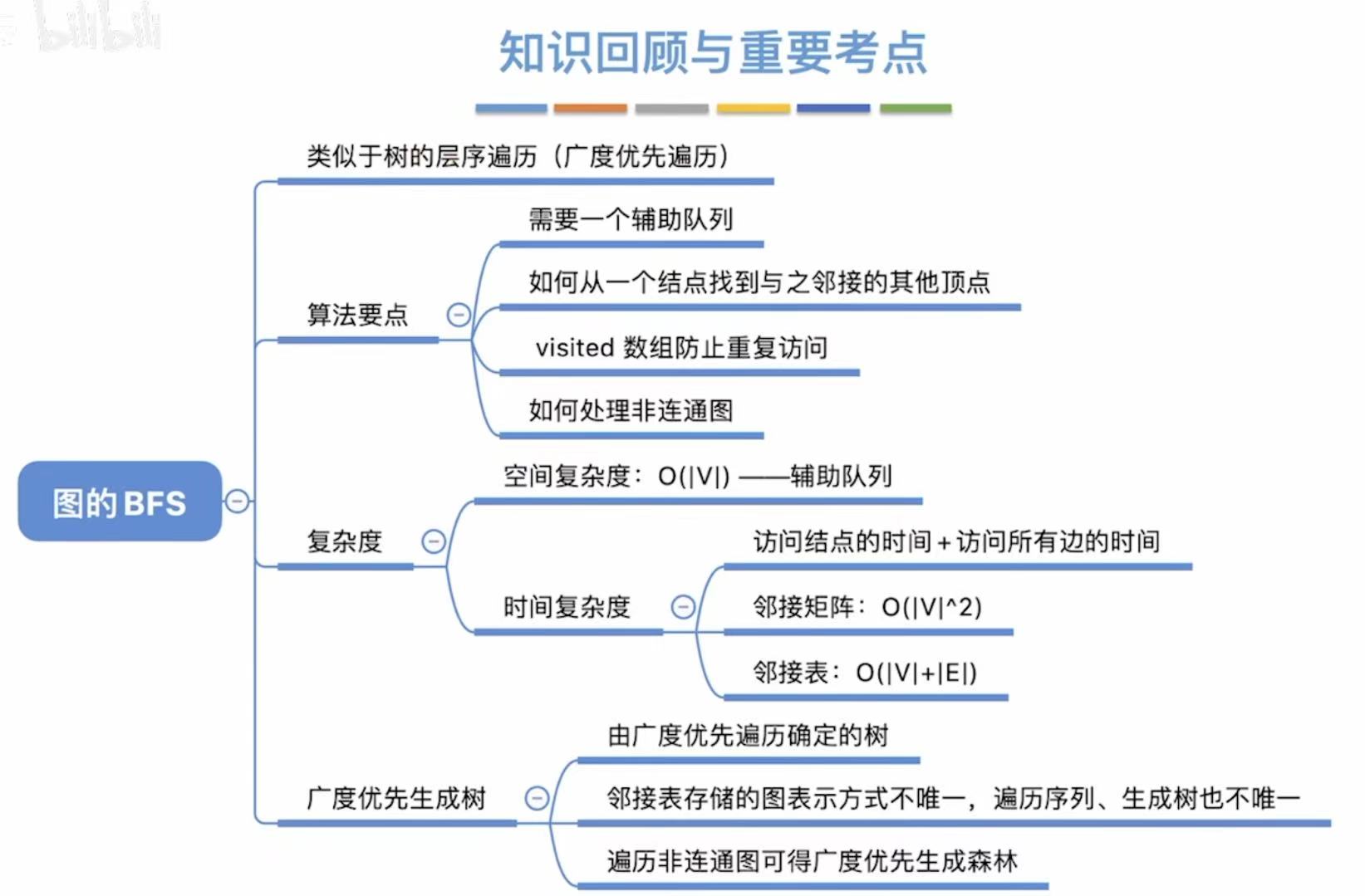
广度优先遍历 :就是一个顶点和谁相邻,就把相邻的点全部遍历到,再反复重复这个过程。
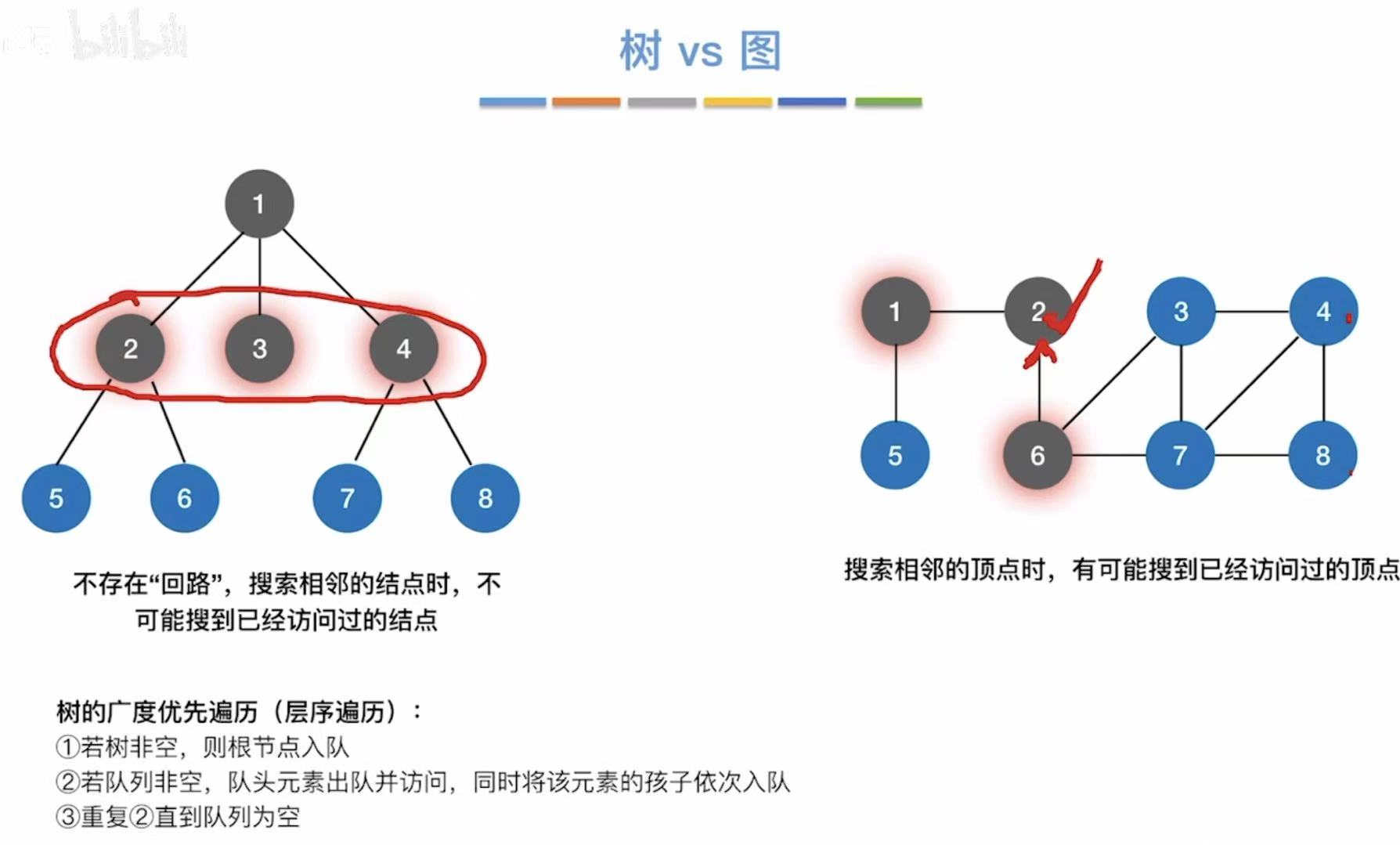
1.1 与树的广度优先遍历之间的联系
区别 :遍历的过程中,树不可能有访问过的结点,而图可能会有访问过的顶点。
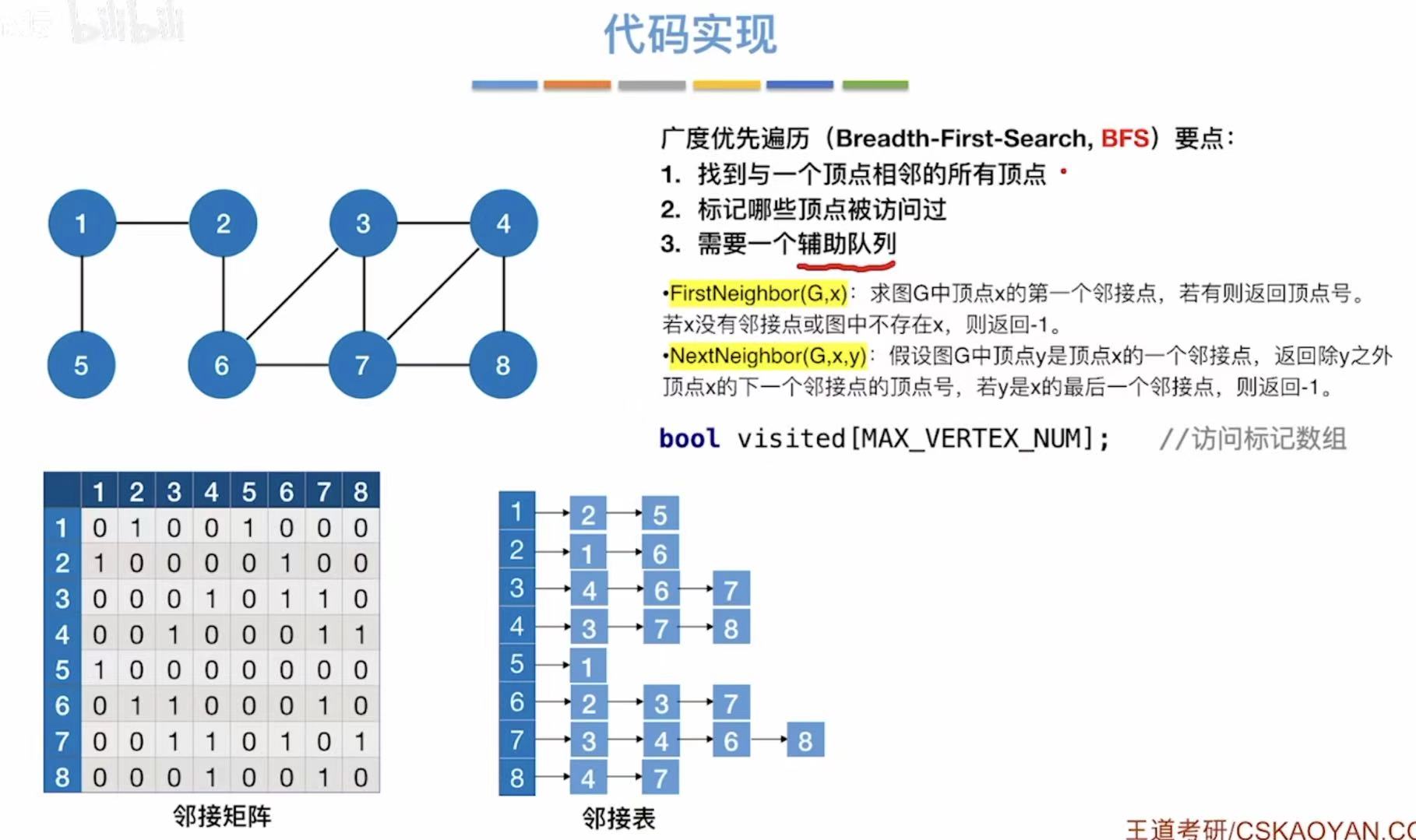
1.2 代码实现
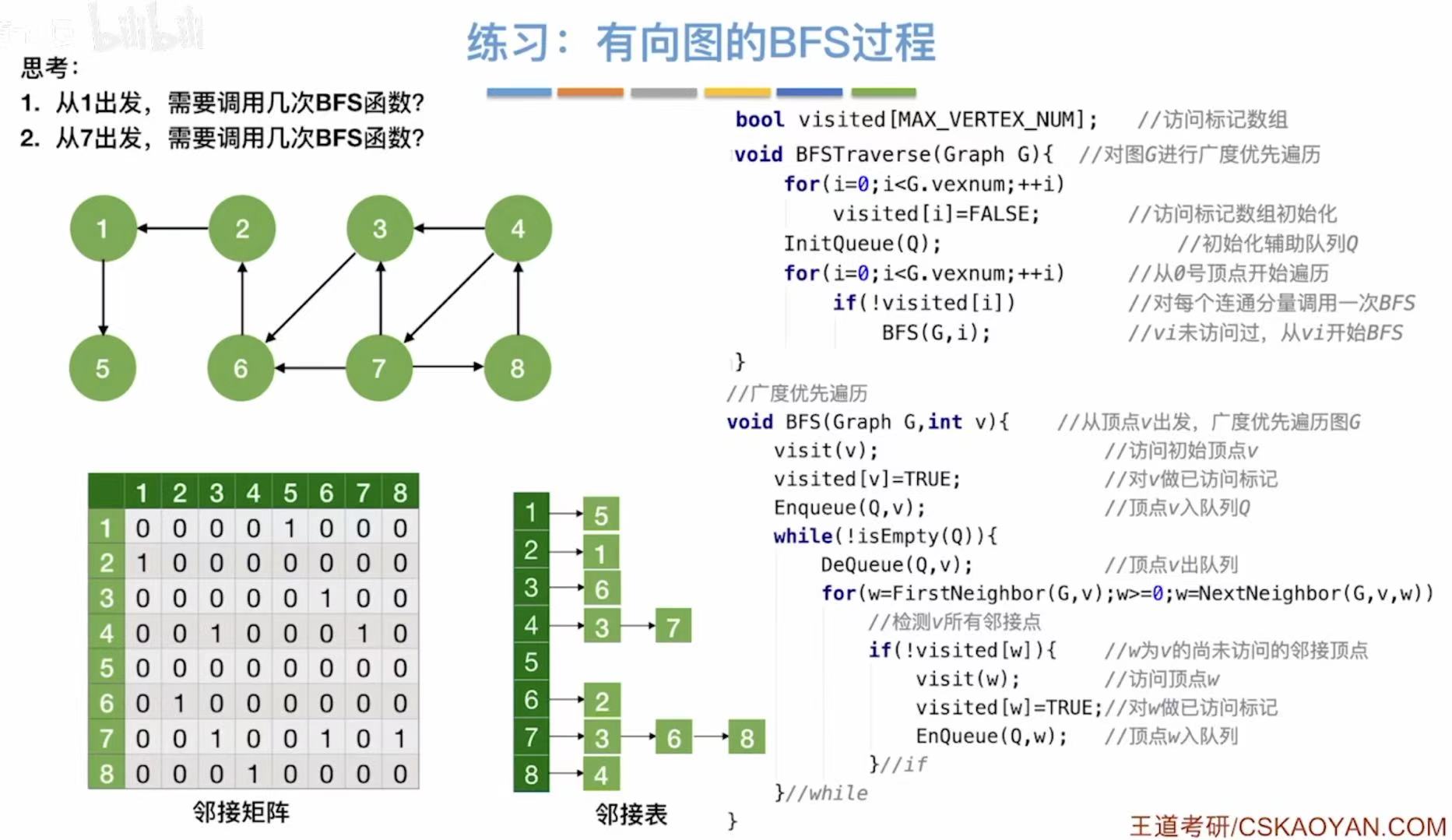
- 比如挑2作为开始遍历的点
- FirstNeighbor就可以以2为中心,找这个顶点的第一个邻接点-->1
- NextNeighbor就可以在"2 的邻接点列表中",找到紧跟在 1 后面的那个邻接点5。
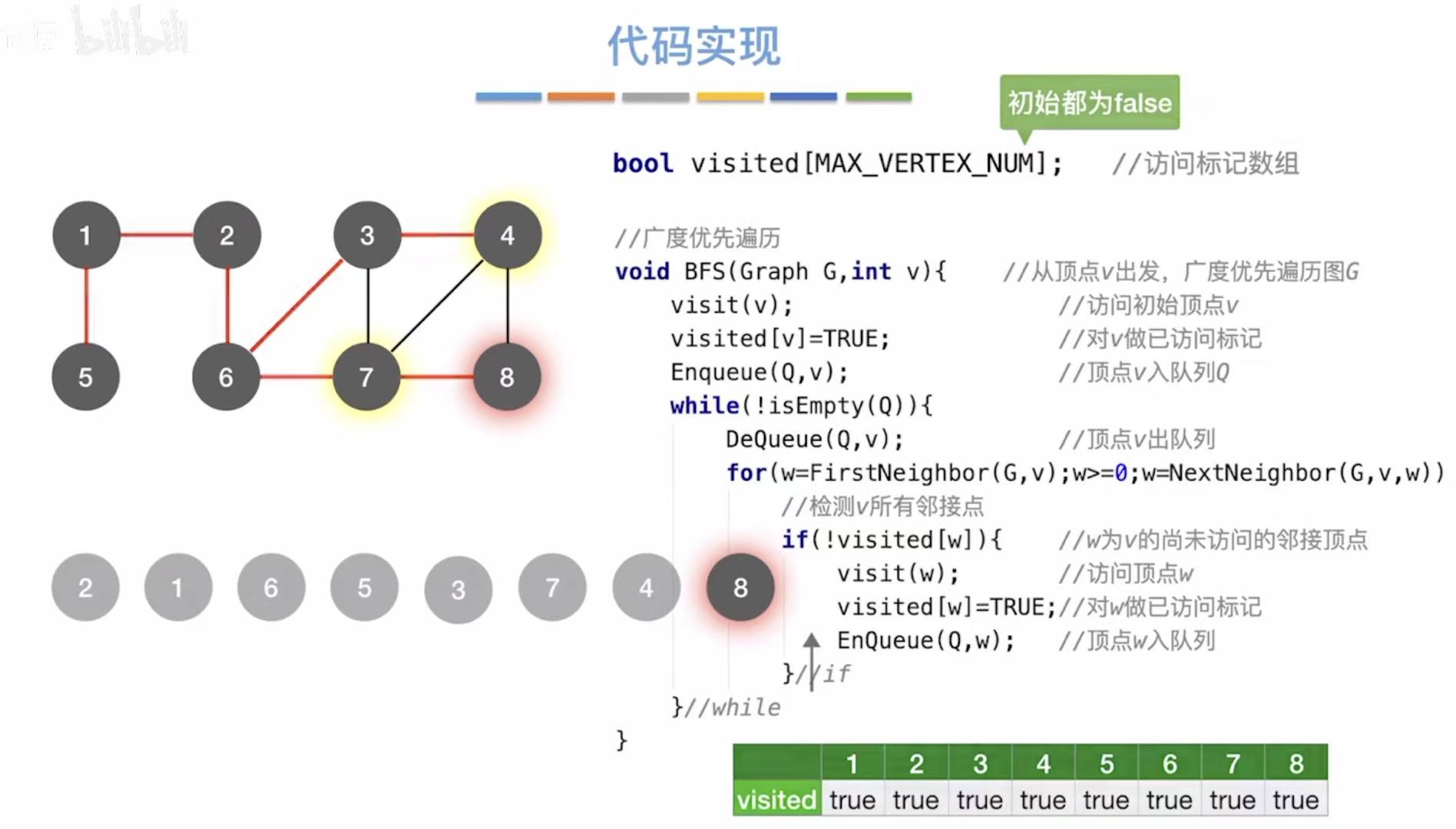
java
// 访问标记数组:记录每个顶点是否已被访问过
// 初始时所有值都为 false(未访问)
bool visited[MAX_VERTEX_NUM]; // 访问标记数组
// 广度优先遍历函数
void BFS(Graph G, int v) {
visit(v); // 访问起始顶点 v(如打印或处理数据)
visited[v] = TRUE; // 将顶点 v 标记为已访问
Enqueue(Q, v); // 将顶点 v 入队列 Q(准备开始遍历)
while (!isEmpty(Q)) { // 当队列不为空时,继续遍历
DeQueue(Q, v); // 从队列中取出一个顶点 v(先进先出)
// 遍历当前顶点 v 的所有邻接点 w
// 使用 FirstNeighbor 和 NextNeighbor 枚举所有邻接点
for (w = FirstNeighbor(G, v); w >= 0; w = NextNeighbor(G, v, w)) {
if (!visited[w]) { // 如果邻接点 w 还未被访问
visit(w); // 访问该邻接点 w
visited[w] = TRUE;// 标记为已访问
EnQueue(Q, w); // 将 w 入队列,等待后续处理
}
}
}
}
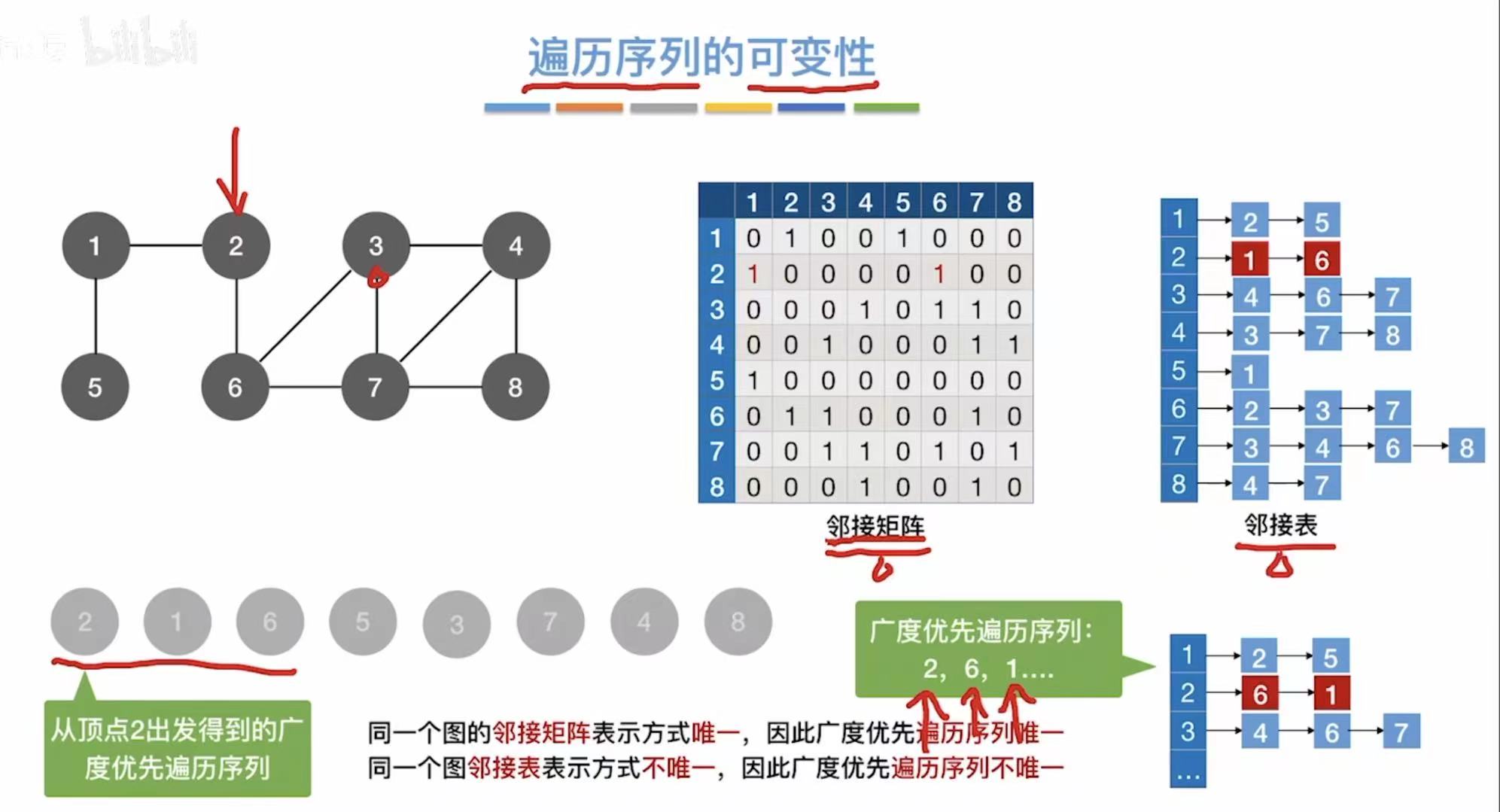
1.3 遍历序列
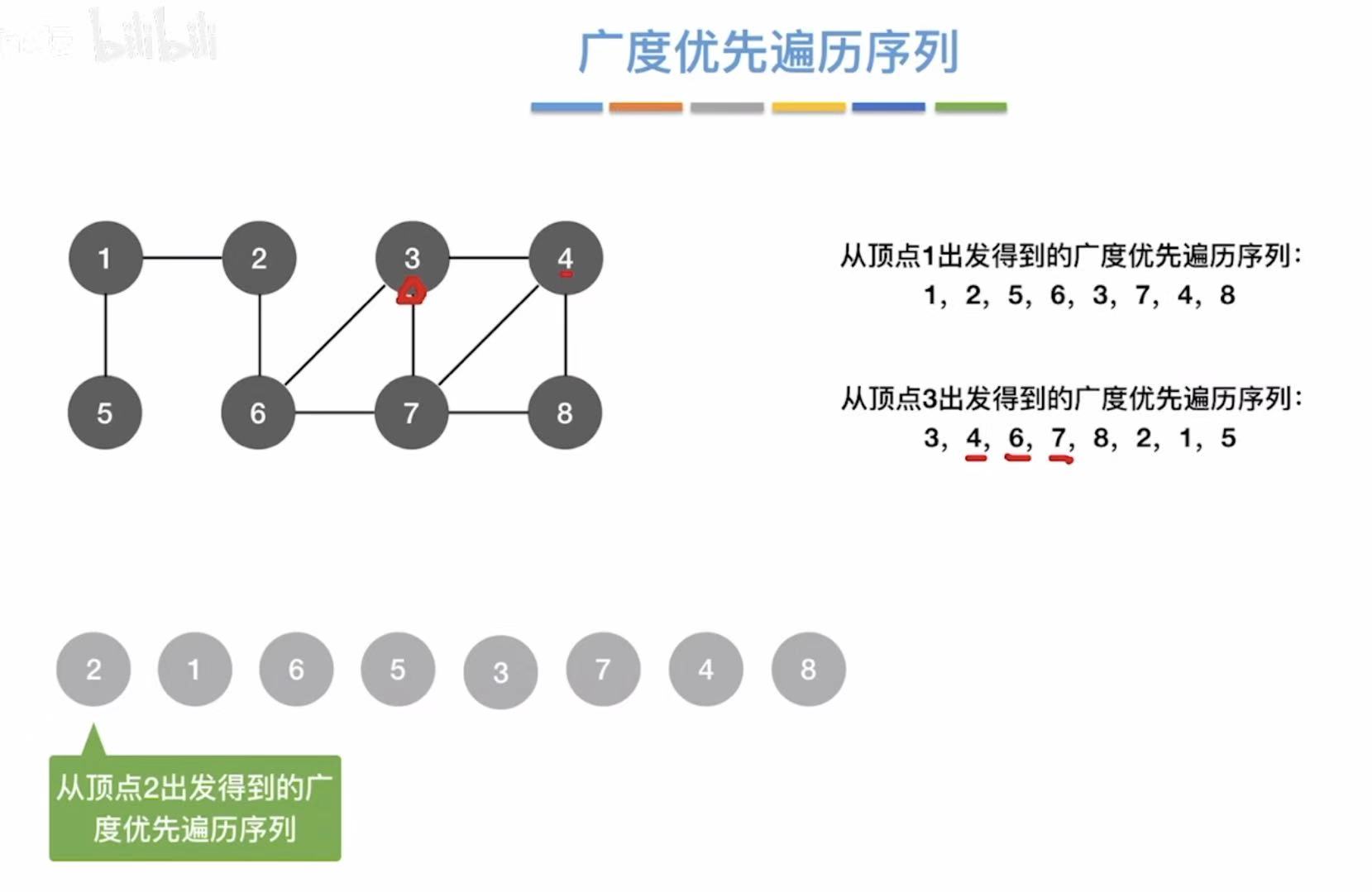
- 邻接矩阵:因为就0和1来表示,顶点都是按数字顺序排列的,所以表示方式唯一。
- 邻接表:因为后面用链表链接的序号可以随意排序,所以表示方式并不唯一。
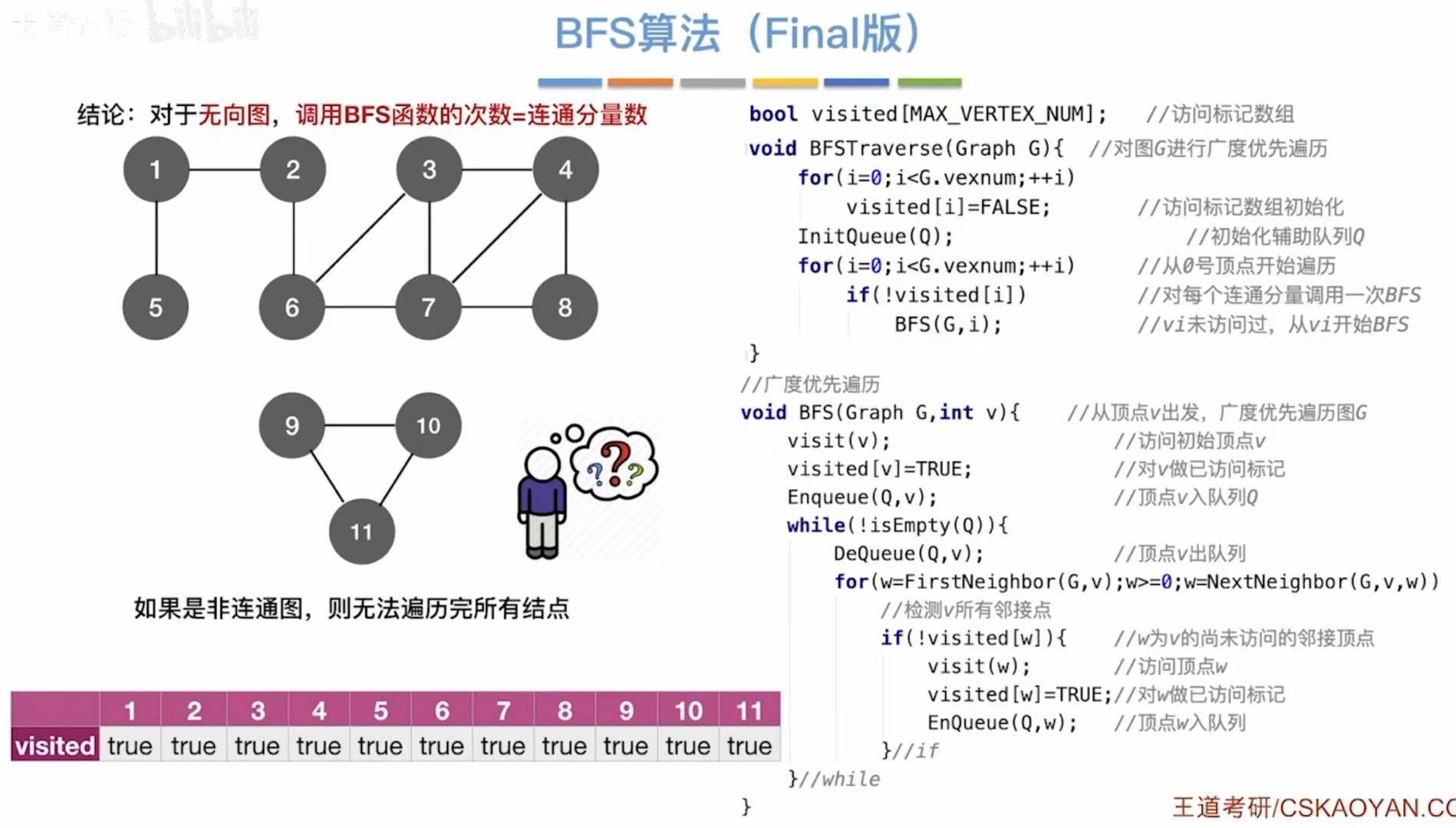
1.4 最终实现
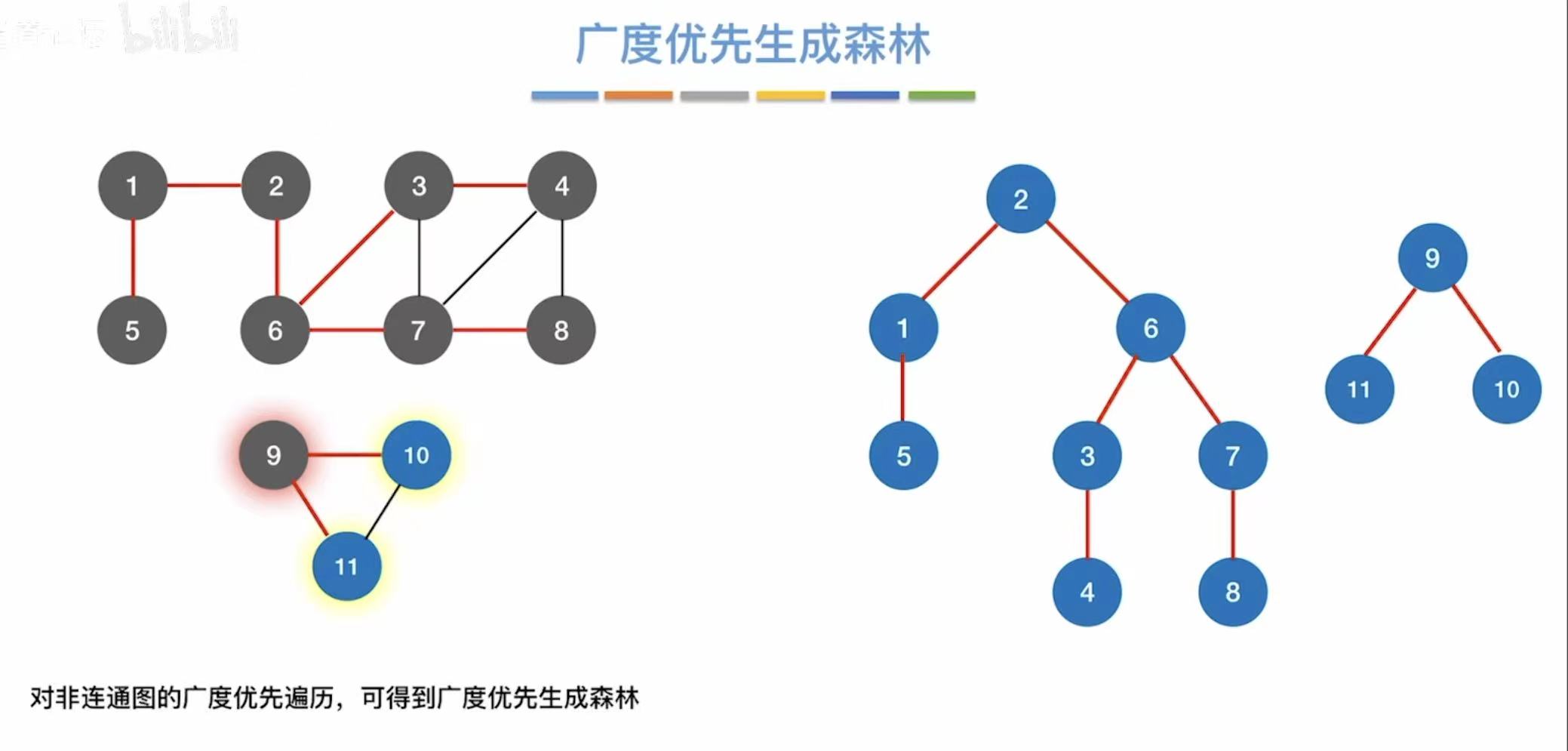
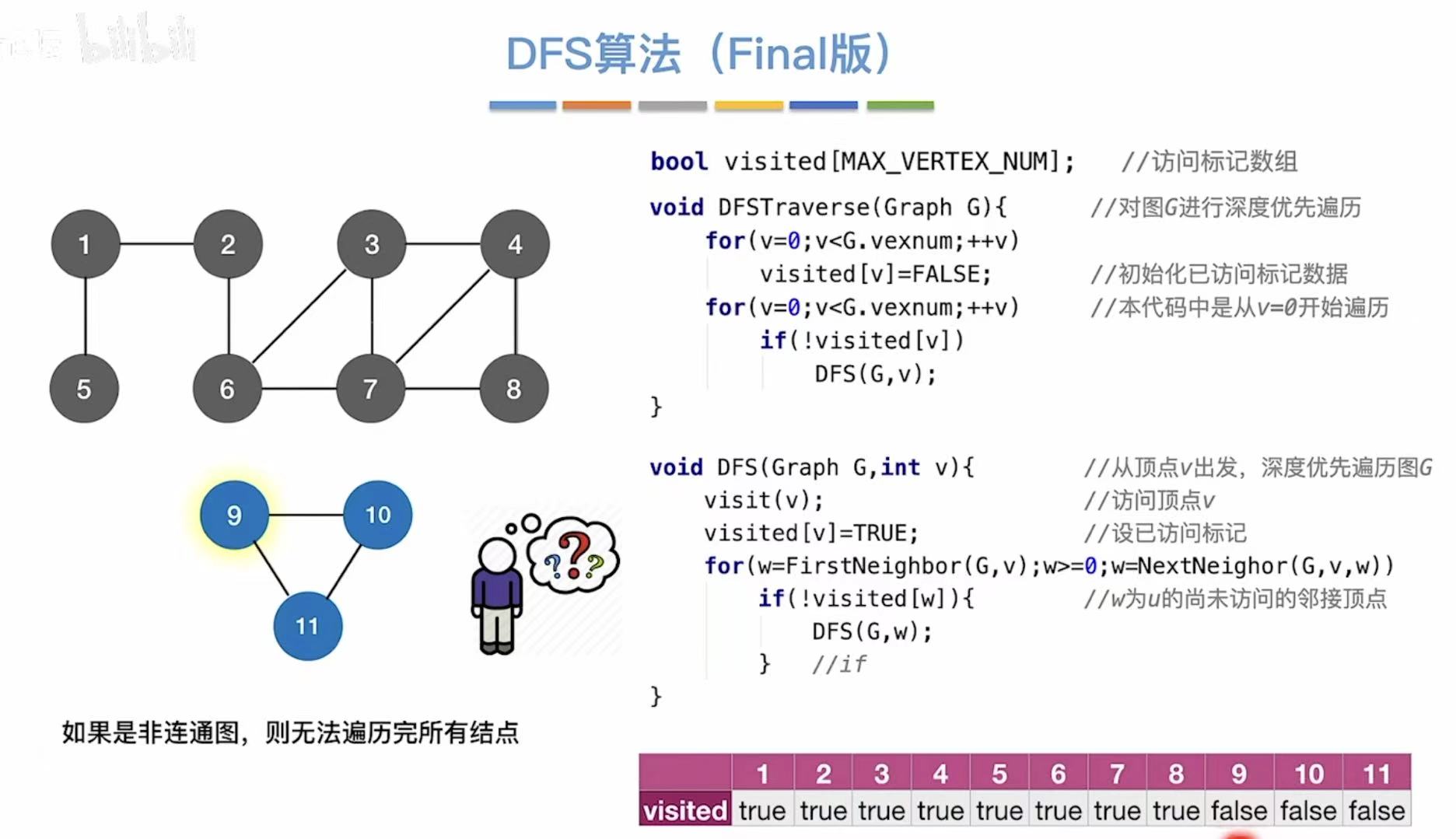
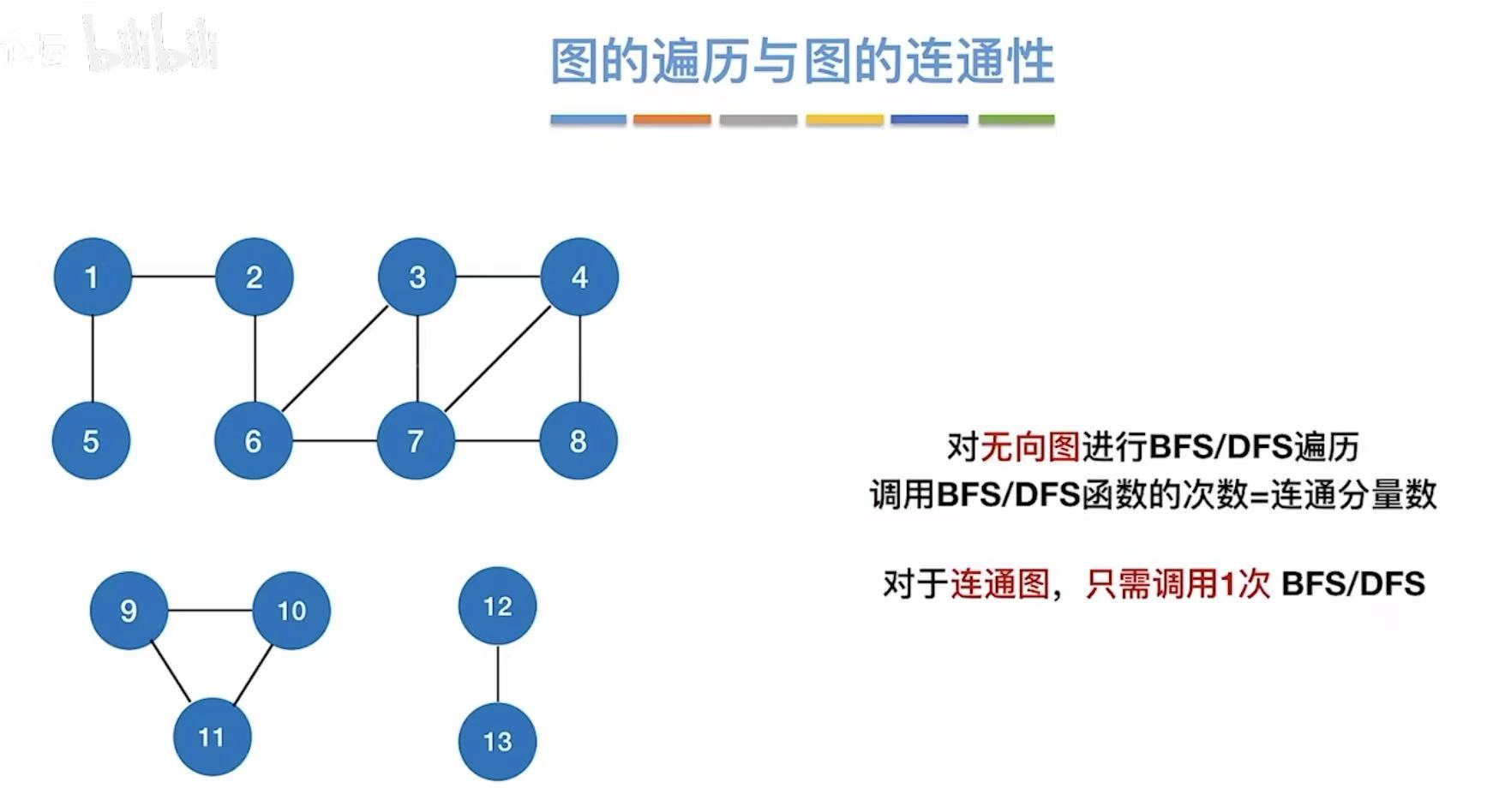
如果是非连通图,就没办法全部遍历到,所以我们就需要扩充我们的结点表,让没遍历到的结点进行遍历。
java
// 访问标记数组:记录每个顶点是否已被访问过
// 初始时所有值都为 false(未访问)
bool visited[MAX_VERTEX_NUM]; // 访问标记数组
// 对图 G 进行广度优先遍历的主函数
void BFSTraverse(Graph G) {
// 初始化访问标记数组:将所有顶点标记为"未访问"
for (i = 0; i < G.vexnum; ++i) {
visited[i] = FALSE; // 所有顶点初始状态为未访问
}
// 初始化辅助队列 Q(用于 BFS 遍历)
InitQueue(Q); // 创建空队列
// 遍历图中的每一个顶点(处理非连通图)
for (i = 0; i < G.vexnum; ++i) {
// 如果当前顶点 i 尚未被访问
if (!visited[i]) {
// 从该顶点出发,进行一次 BFS 遍历
BFS(G, i); // 调用 BFS 函数,遍历以 i 为起点的连通分量
}
}
}
// 广度优先遍历函数(从顶点 v 开始)
void BFS(Graph G, int v) {
visit(v); // 访问起始顶点 v(如打印或处理数据)
visited[v] = TRUE; // 将顶点 v 标记为已访问
Enqueue(Q, v); // 将顶点 v 入队列 Q(准备开始遍历)
while (!isEmpty(Q)) { // 当队列不为空时,继续遍历
DeQueue(Q, v); // 从队列中取出一个顶点 v(先进先出)
// 遍历当前顶点 v 的所有邻接点 w
// 使用 FirstNeighbor 和 NextNeighbor 枚举所有邻接点
for (w = FirstNeighbor(G, v); w >= 0; w = NextNeighbor(G, v, w)) {
// 如果邻接点 w 还未被访问
if (!visited[w]) {
visit(w); // 访问该邻接点 w
visited[w] = TRUE;// 标记为已访问
EnQueue(Q, w); // 将 w 入队列,等待后续处理
}
}
}
}
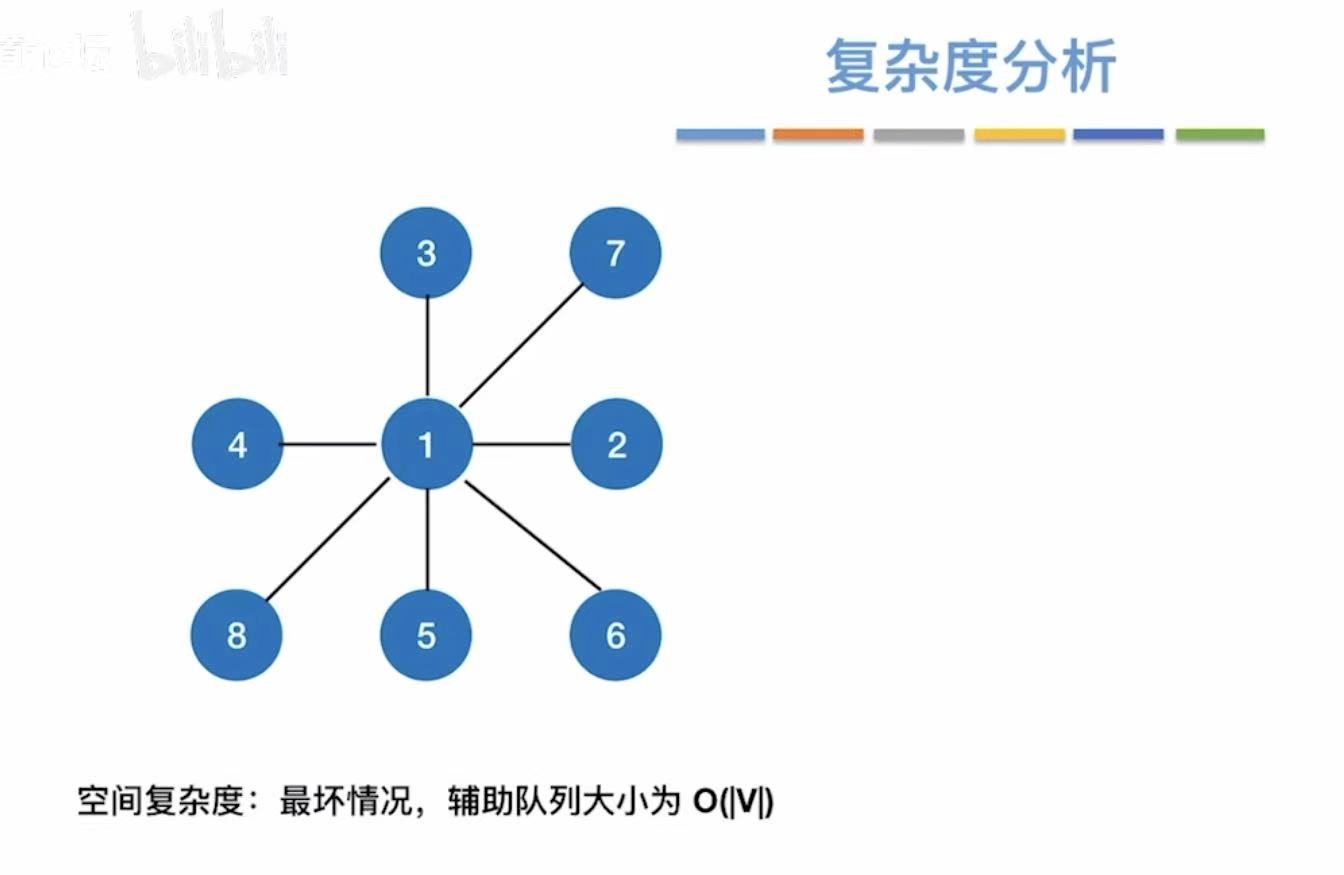
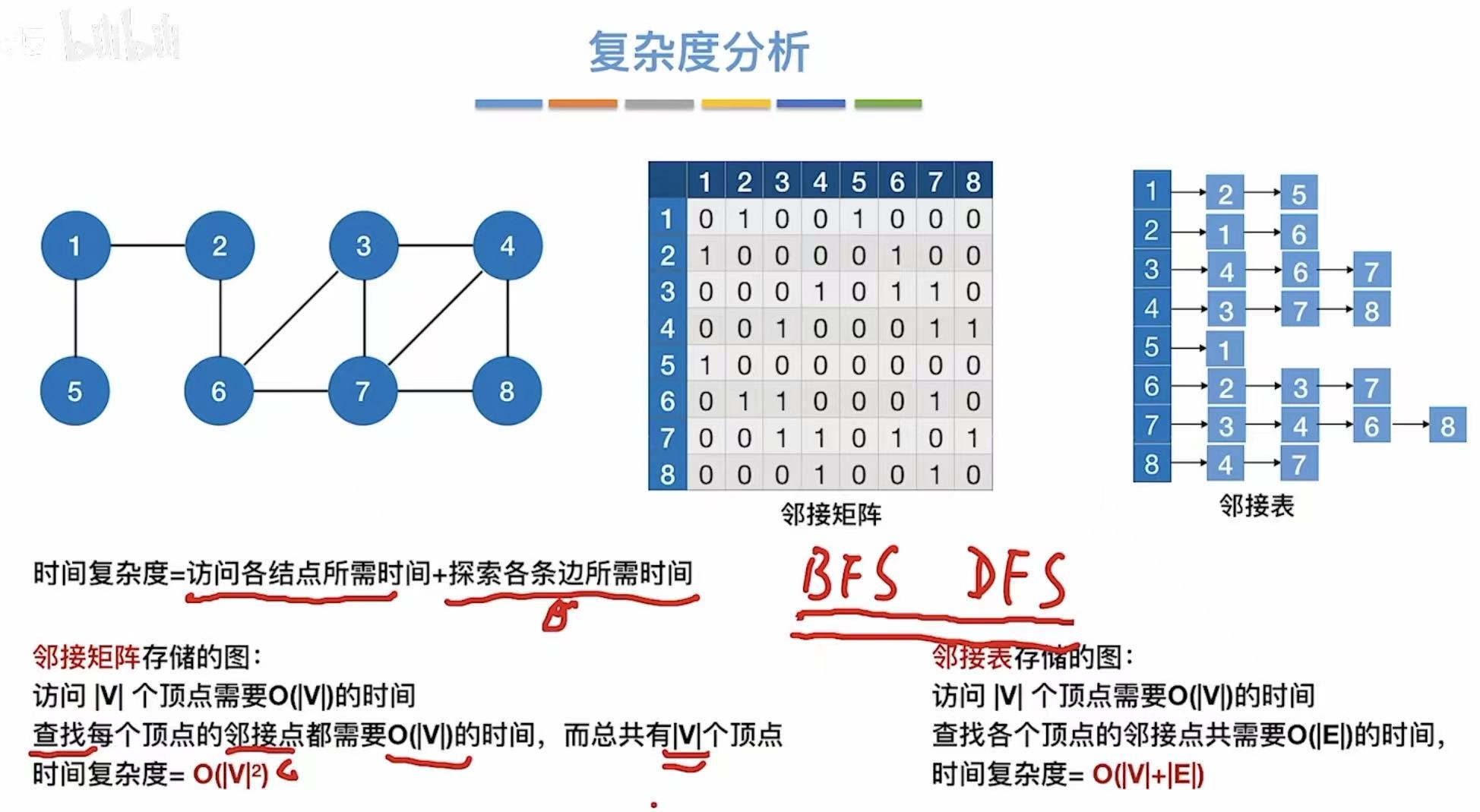
1.5 复杂度分析
1.6 广度优先生成树
以2为起始点的生成树:
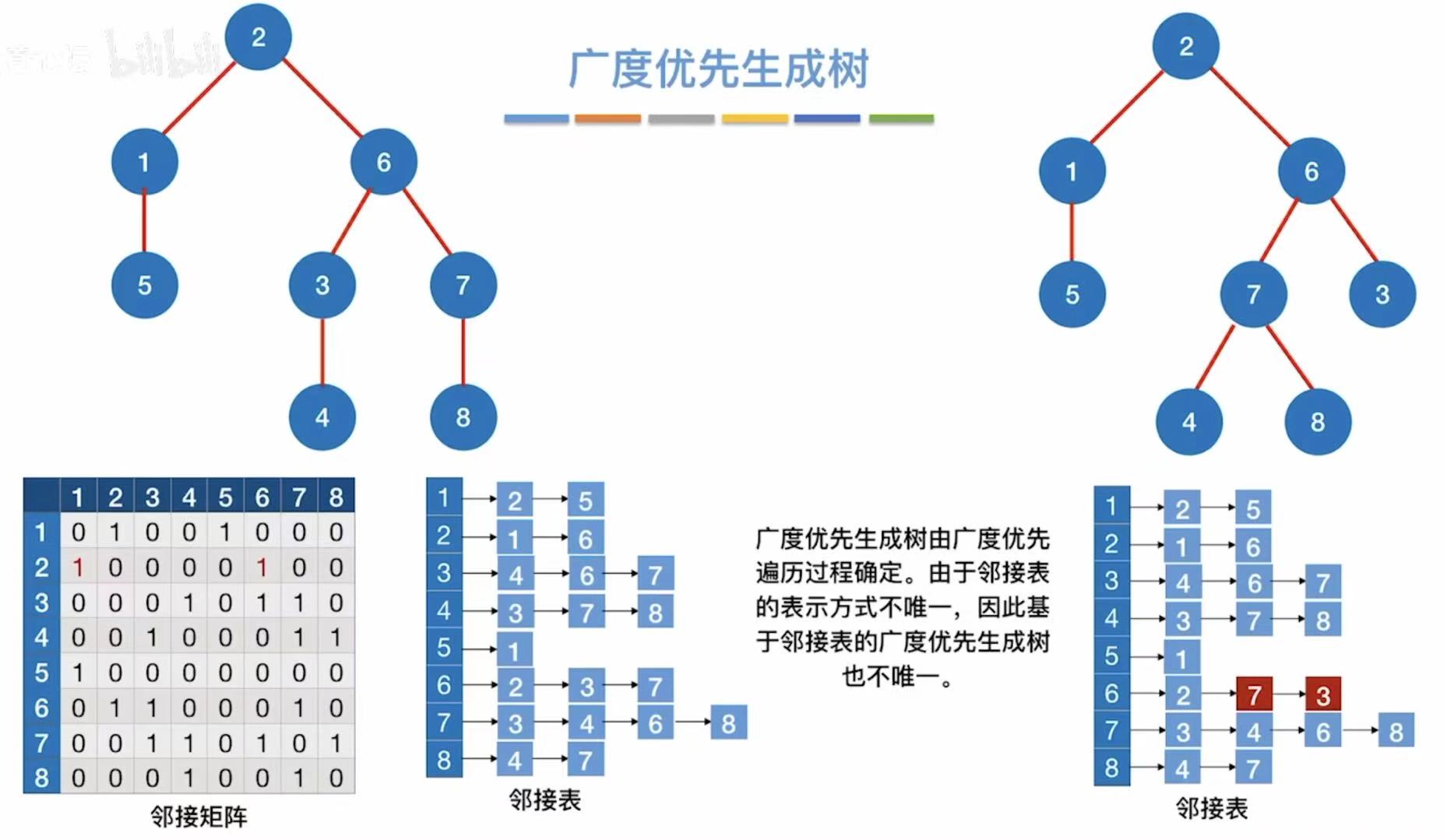
2-->1-->6-->5-->3-->7-->4-->8
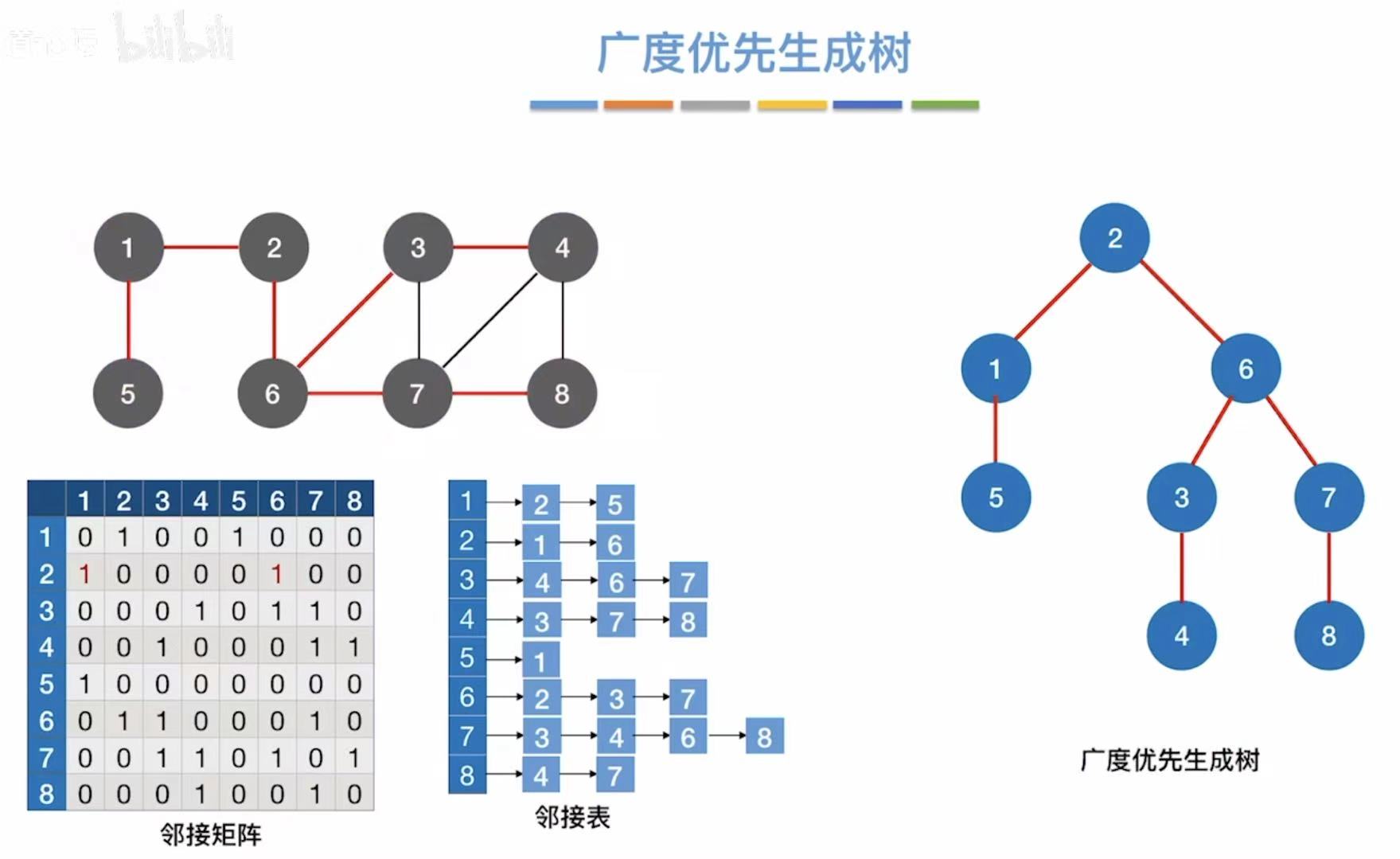
2-->1-->6-->5-->7-->3-->4-->8
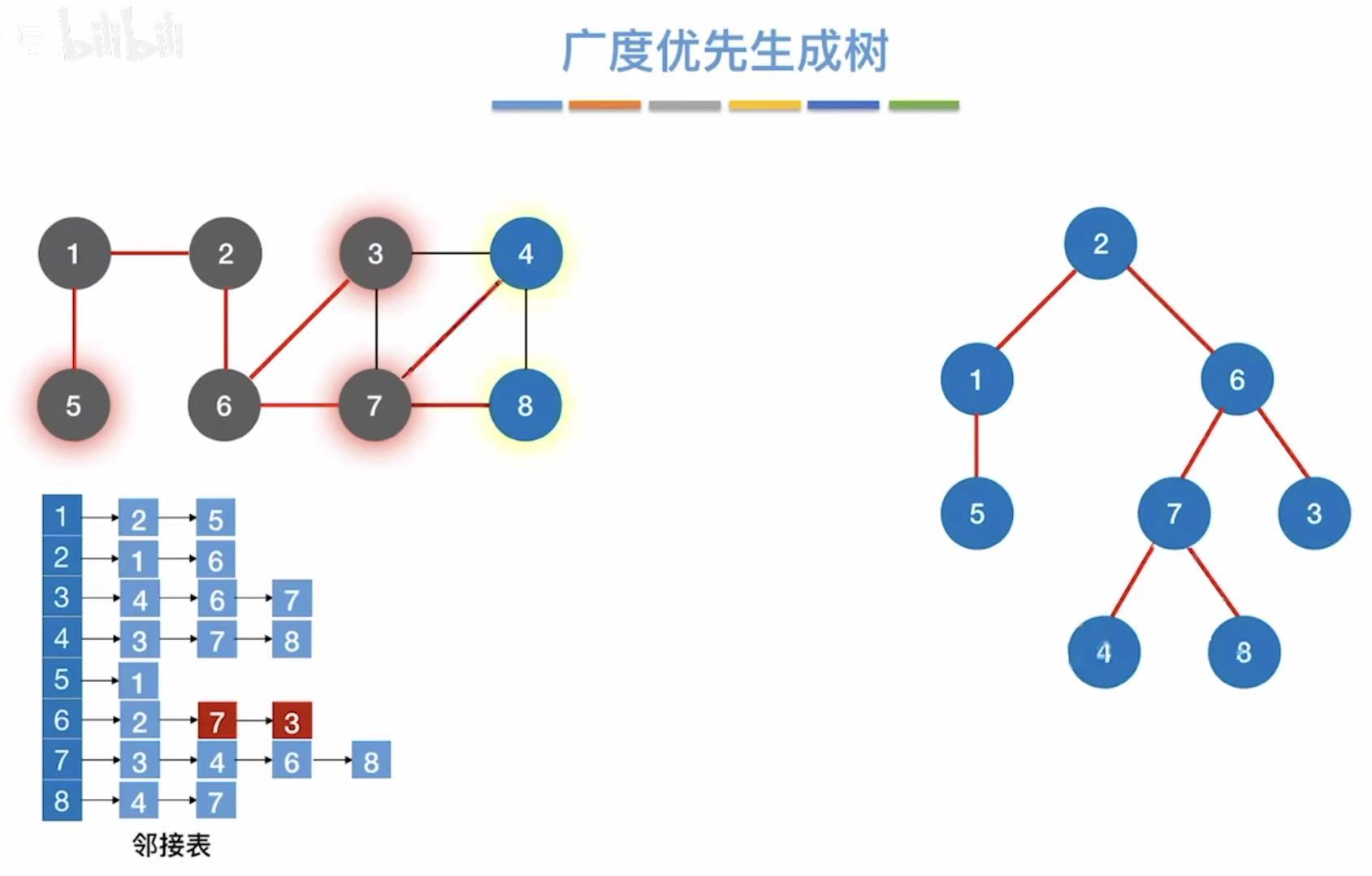
由此可见,访问顺序与路径的不同都会导致生成树的不同。
1.7 小结
2. 深度优先遍历(DFS)
2.1 概念
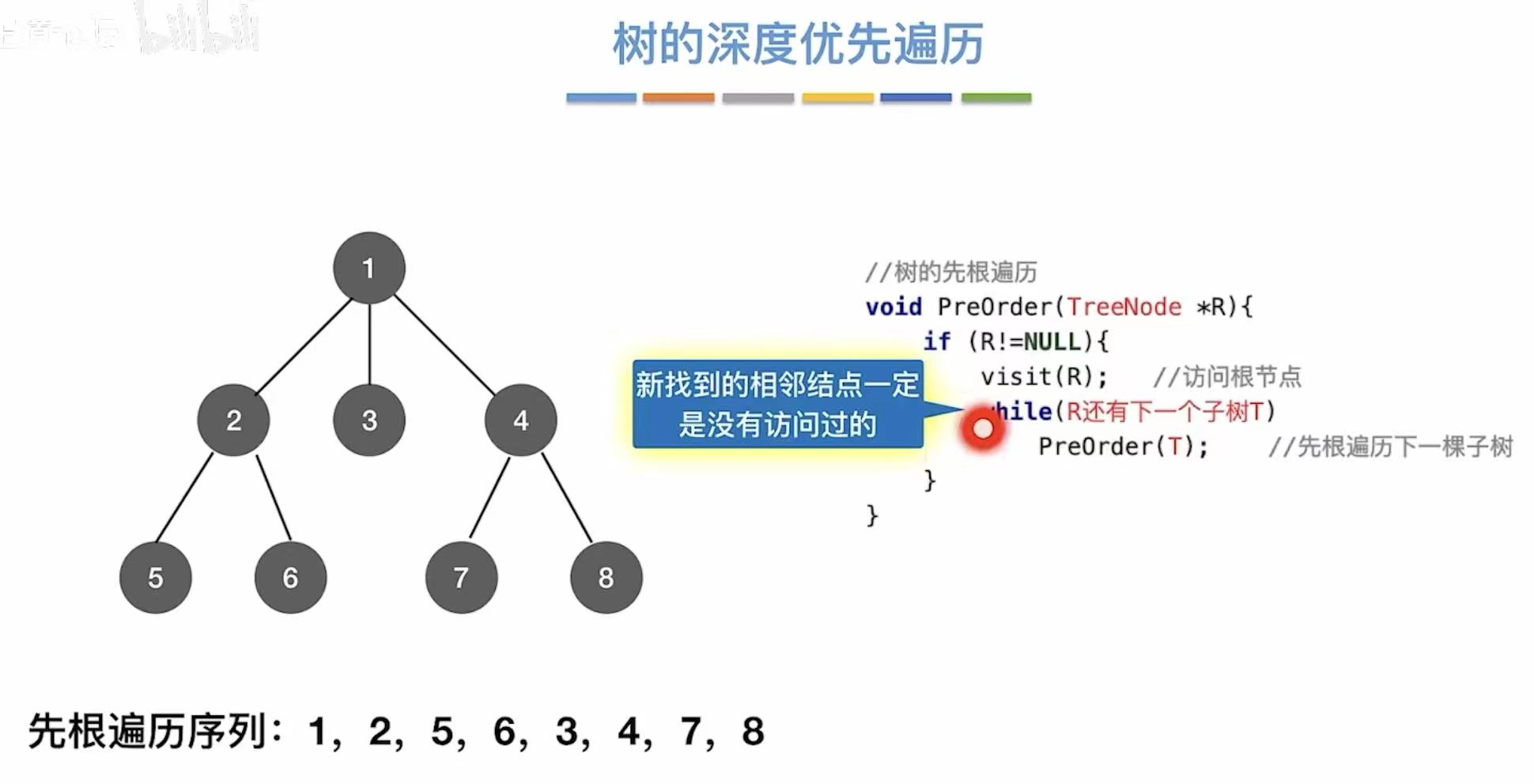
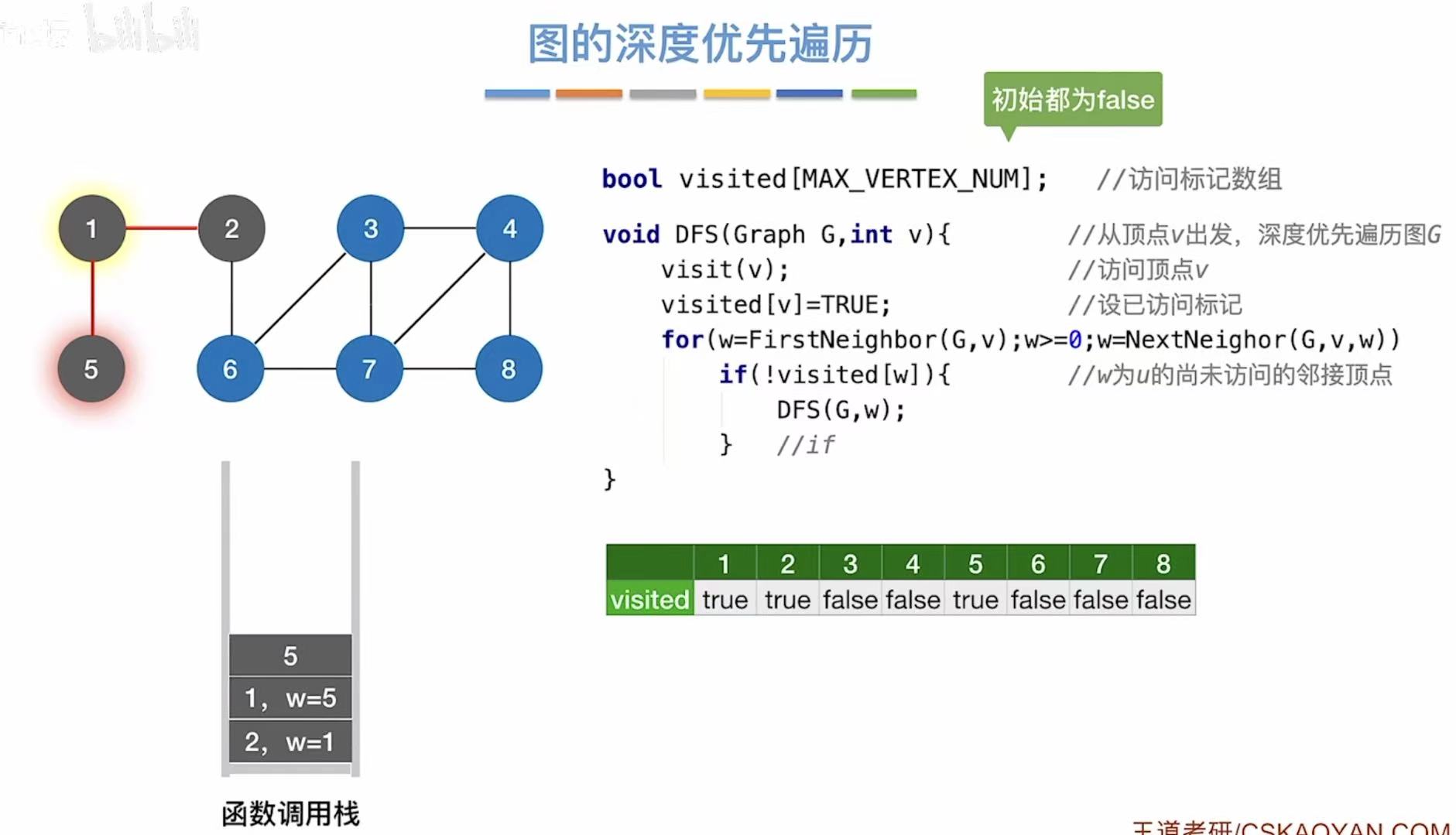
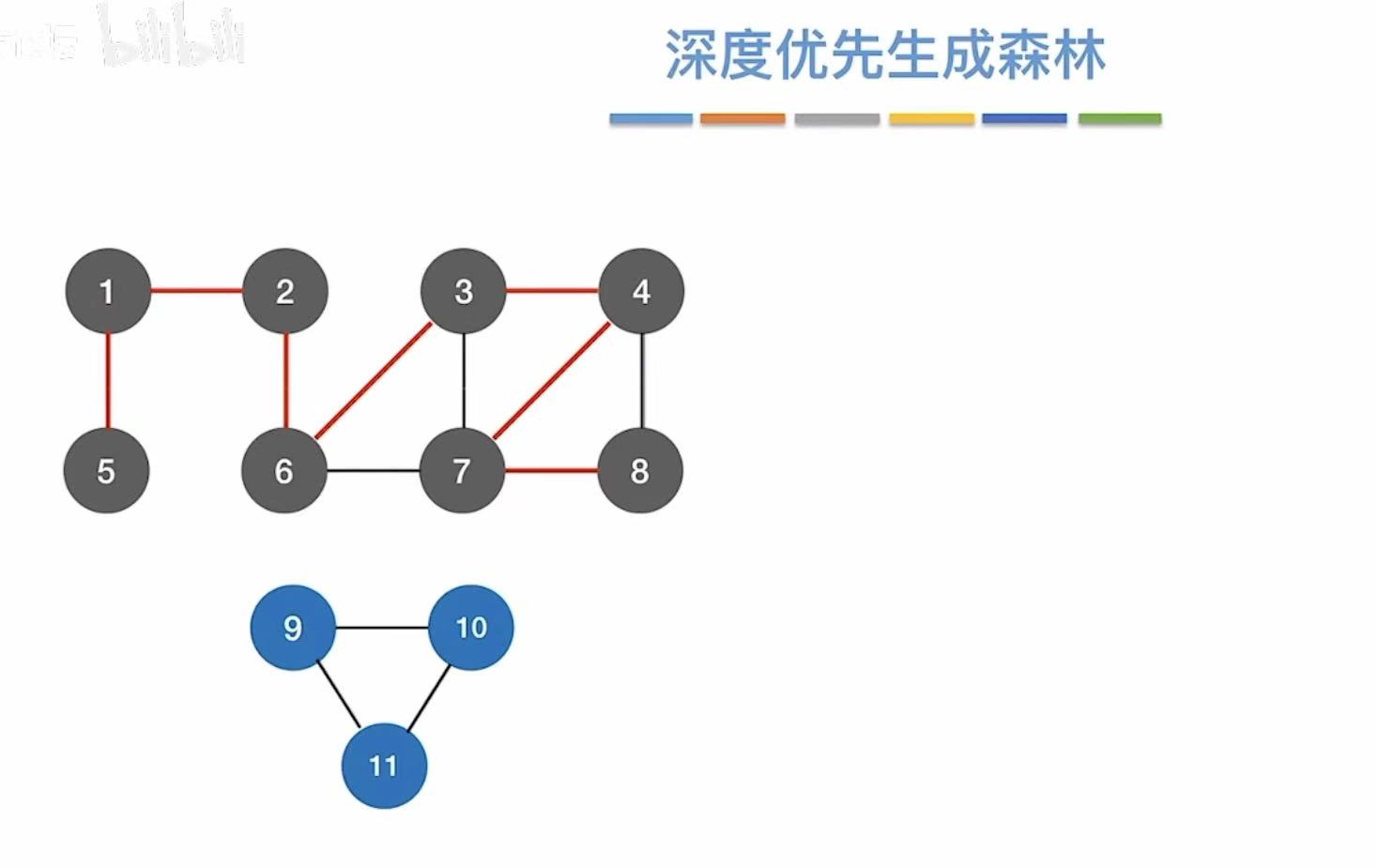
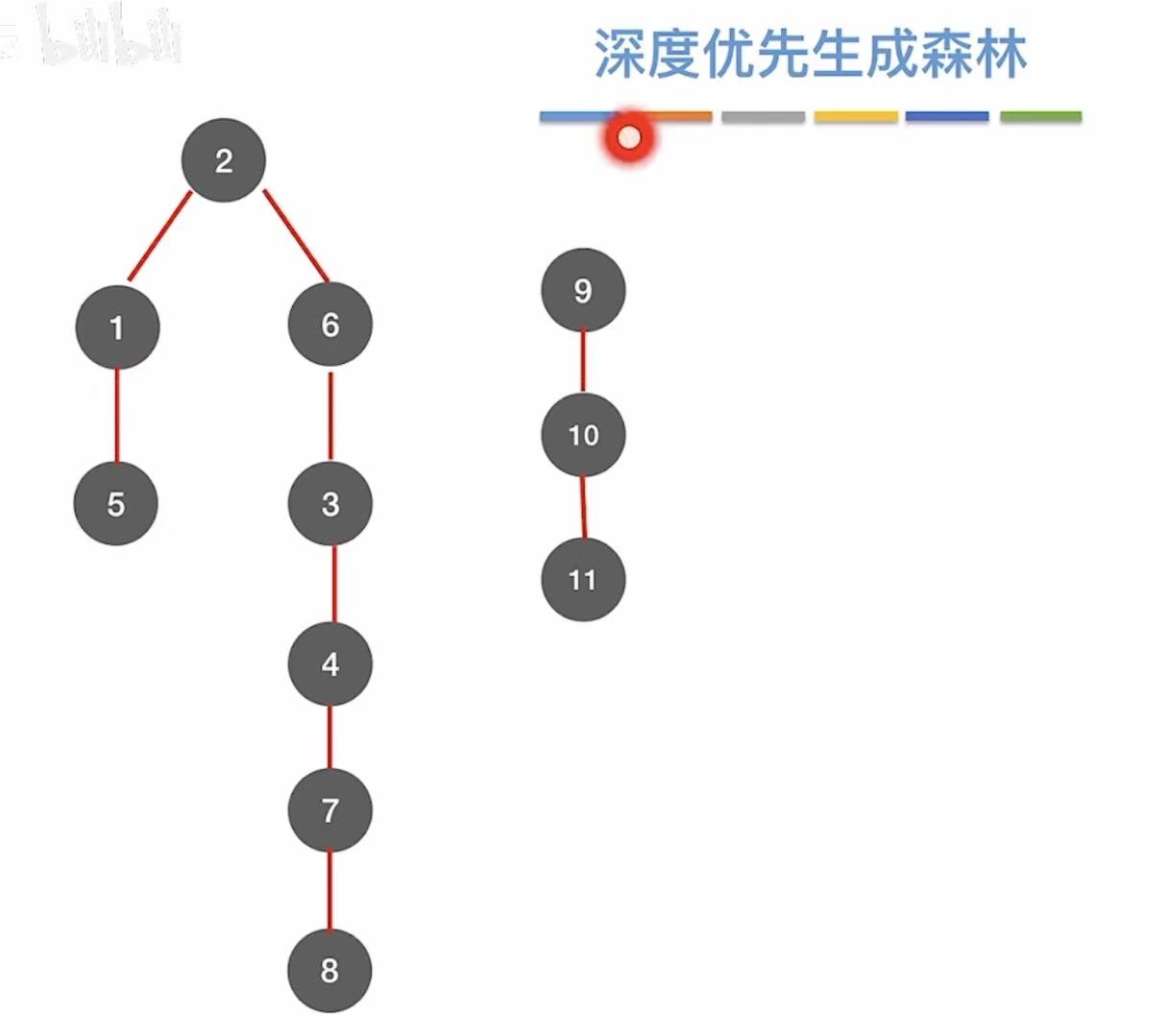
深度优先遍历:就是一个顶点和谁相邻,就先把一边的遍历到底,再遍历另外一边。
如图:先遍历2的左侧-->1-->5。
如图:再遍历另一边一直到底(8).
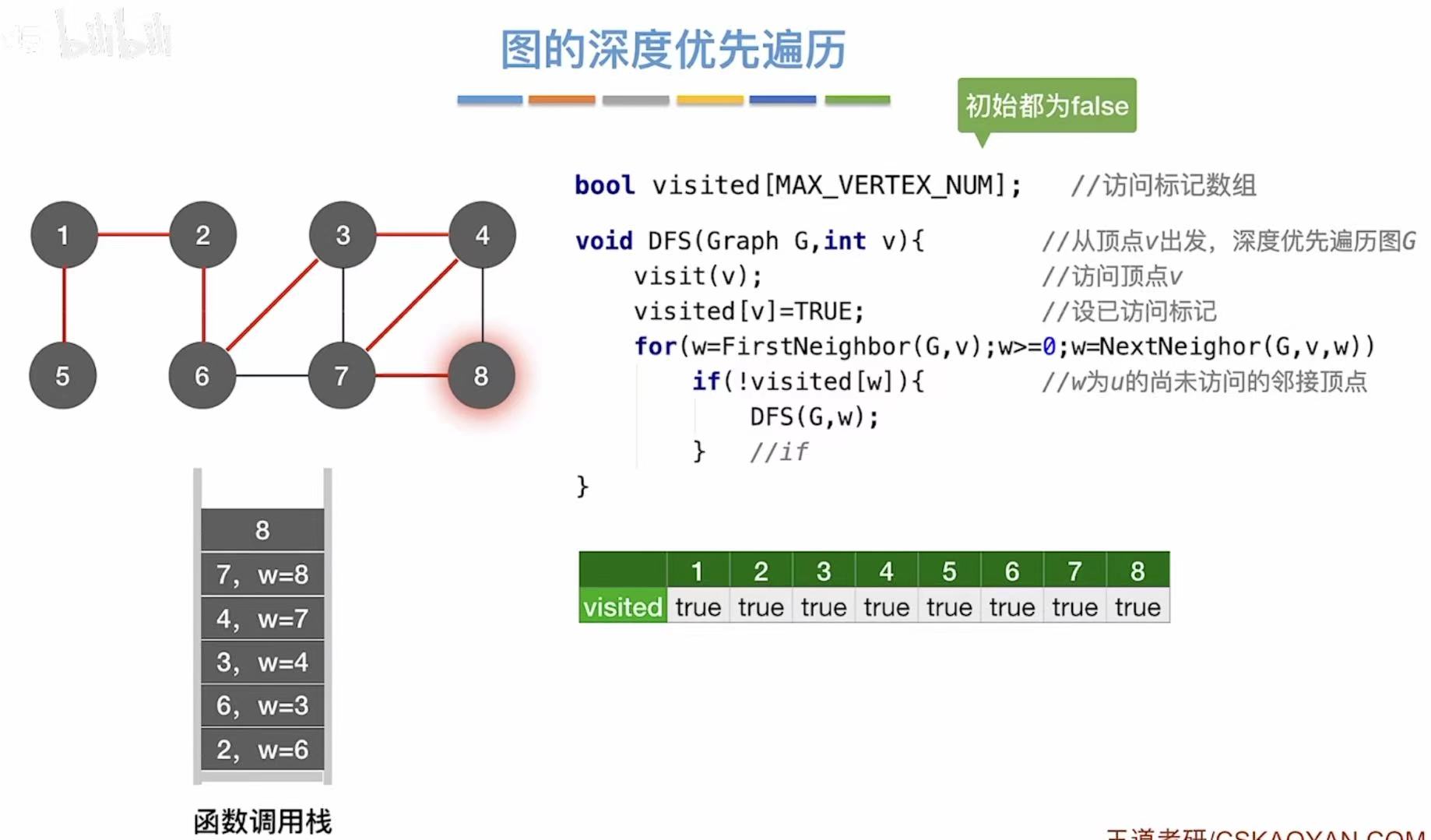
java
// 访问标记数组:记录每个顶点是否已被访问过
// 初始时所有值都为 false(未访问)
bool visited[MAX_VERTEX_NUM]; // 访问标记数组
// 深度优先遍历函数
void DFS(Graph G, int v) {
visit(v); // 访问当前顶点 v(如打印或处理数据)
visited[v] = TRUE; // 将顶点 v 标记为已访问,防止重复访问
// 遍历当前顶点 v 的所有邻接点 w
// 使用 FirstNeighbor 和 NextNeighbor 枚举所有邻接点
for (w = FirstNeighbor(G, v); w >= 0; w = NextNeighbor(G, v, w)) {
// 如果邻接点 w 还未被访问
if (!visited[w]) {
// 递归调用 DFS,从 w 开始继续深入遍历
DFS(G, w);
}
}
}
2.2 最终实现
java
// 访问标记数组:记录每个顶点是否已被访问过
// 初始时所有值都为 false(未访问)
bool visited[MAX_VERTEX_NUM]; // 访问标记数组
// 对图 G 进行深度优先遍历的主函数
void DFSTraverse(Graph G) {
// 初始化访问标记数组:将所有顶点标记为"未访问"
for (v = 0; v < G.vexnum; ++v) {
visited[v] = FALSE; // 所有顶点初始状态为未访问
}
// 遍历图中的每一个顶点(处理非连通图)
for (v = 0; v < G.vexnum; ++v) {
// 如果当前顶点 v 尚未被访问
if (!visited[v]) {
// 从该顶点出发,进行一次 DFS 遍历
DFS(G, v); // 调用 DFS 函数,遍历以 v 为起点的连通分量
}
}
}
// 深度优先遍历函数(从顶点 v 开始)
void DFS(Graph G, int v) {
visit(v); // 访问当前顶点 v(如打印或处理数据)
visited[v] = TRUE; // 将顶点 v 标记为已访问,防止重复访问
// 遍历当前顶点 v 的所有邻接点 w
// 使用 FirstNeighbor 和 NextNeighbor 枚举所有邻接点
for (w = FirstNeighbor(G, v); w >= 0; w = NextNeighbor(G, v, w)) {
// 如果邻接点 w 还未被访问
if (!visited[w]) {
// 递归调用 DFS,从 w 开始继续深入遍历
DFS(G, w);
}
}
}
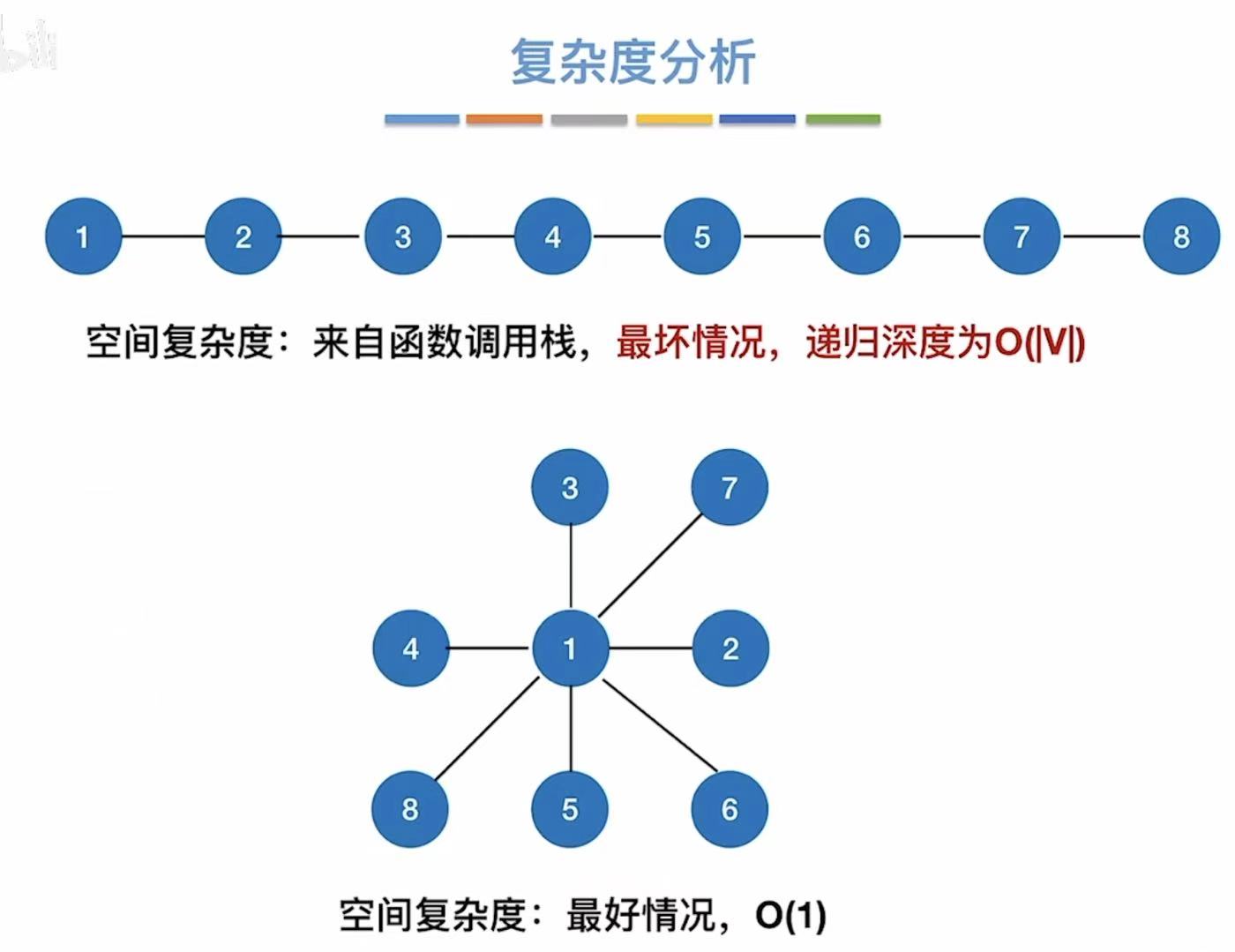
2.3 复杂度分析
空间复杂度:
- 最坏:因为是最深,一直顺着到头,所以最坏肯定就是一排到头。
- 最好:肯定就是八面玲珑,看完2的看3的,看完4的看5的,像买鸡排一样把摊主围起来。
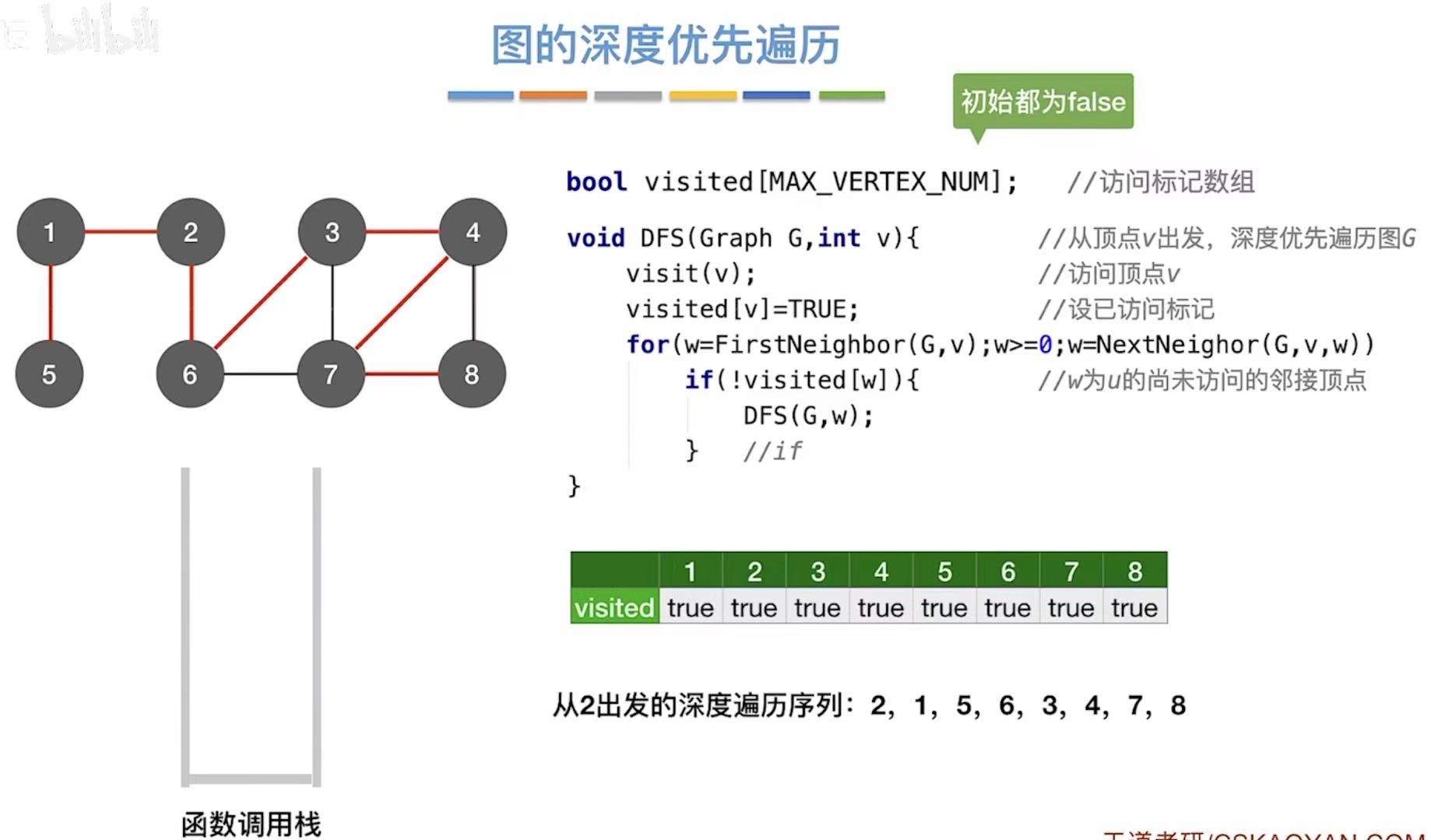
2.4 遍历序列
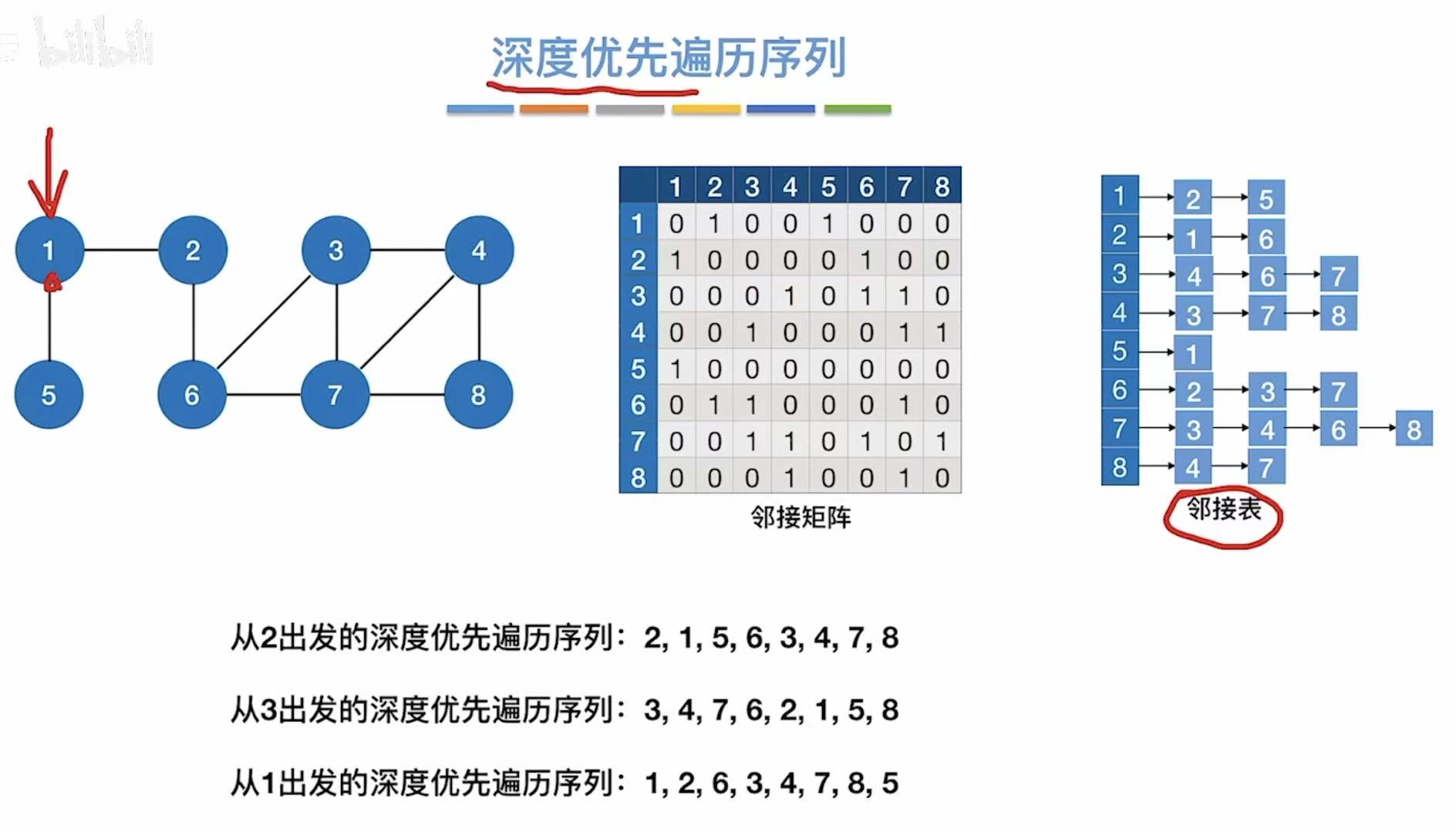
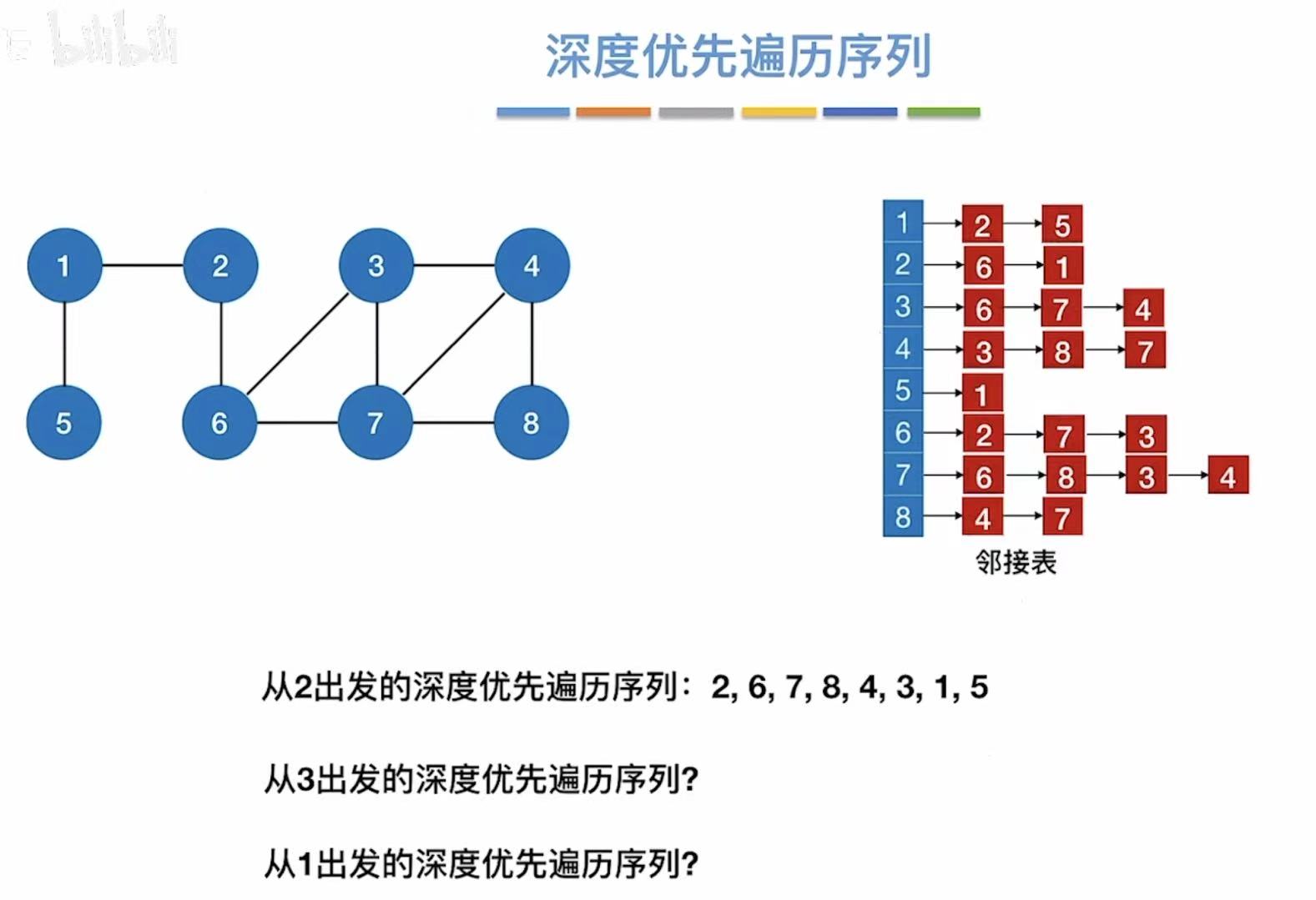
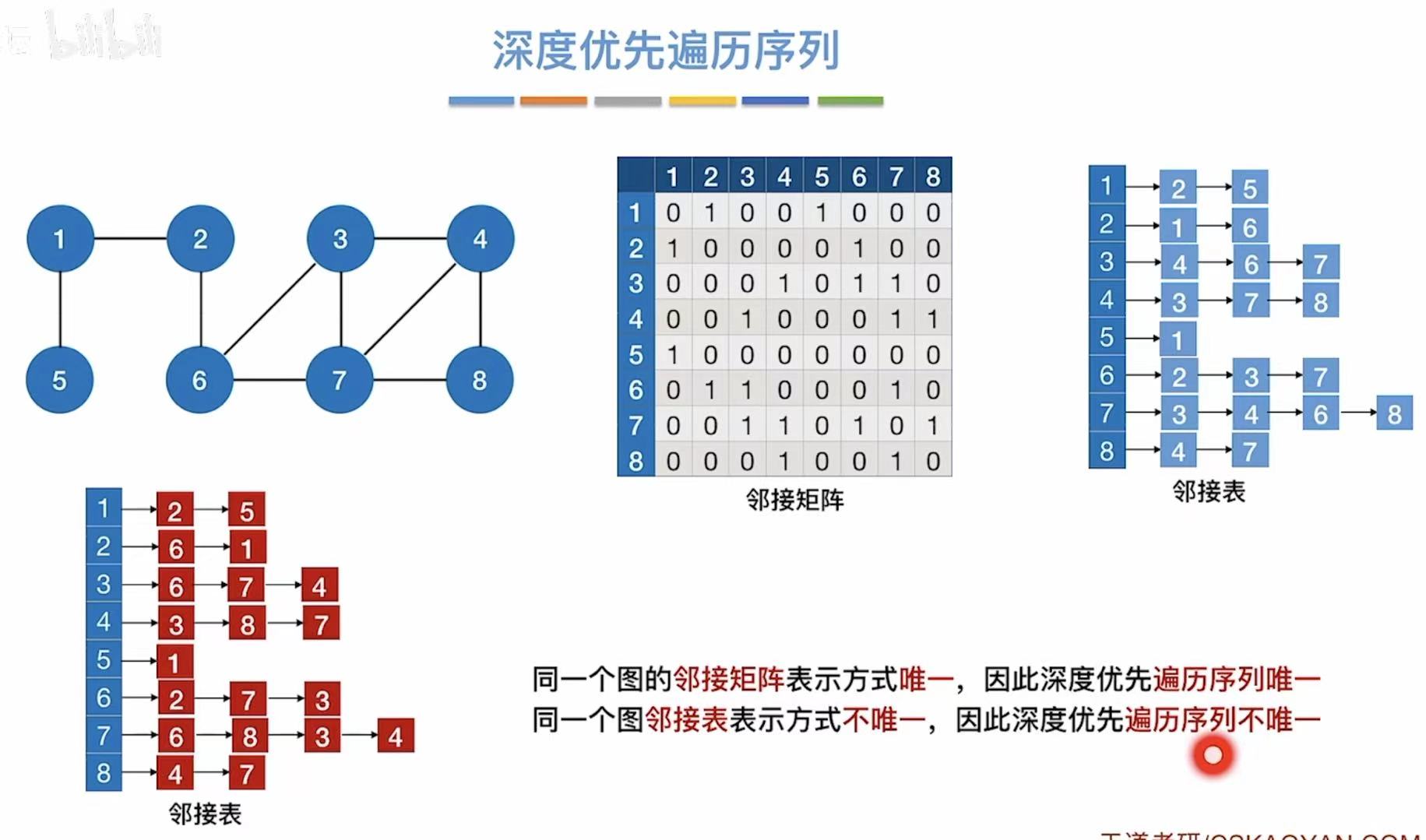
- 邻接矩阵:因为就0和1来表示,顶点都是按数字顺序排列的,所以表示方式唯一。
- 邻接表:因为后面用链表链接的序号可以随意排序,所以表示方式并不唯一。
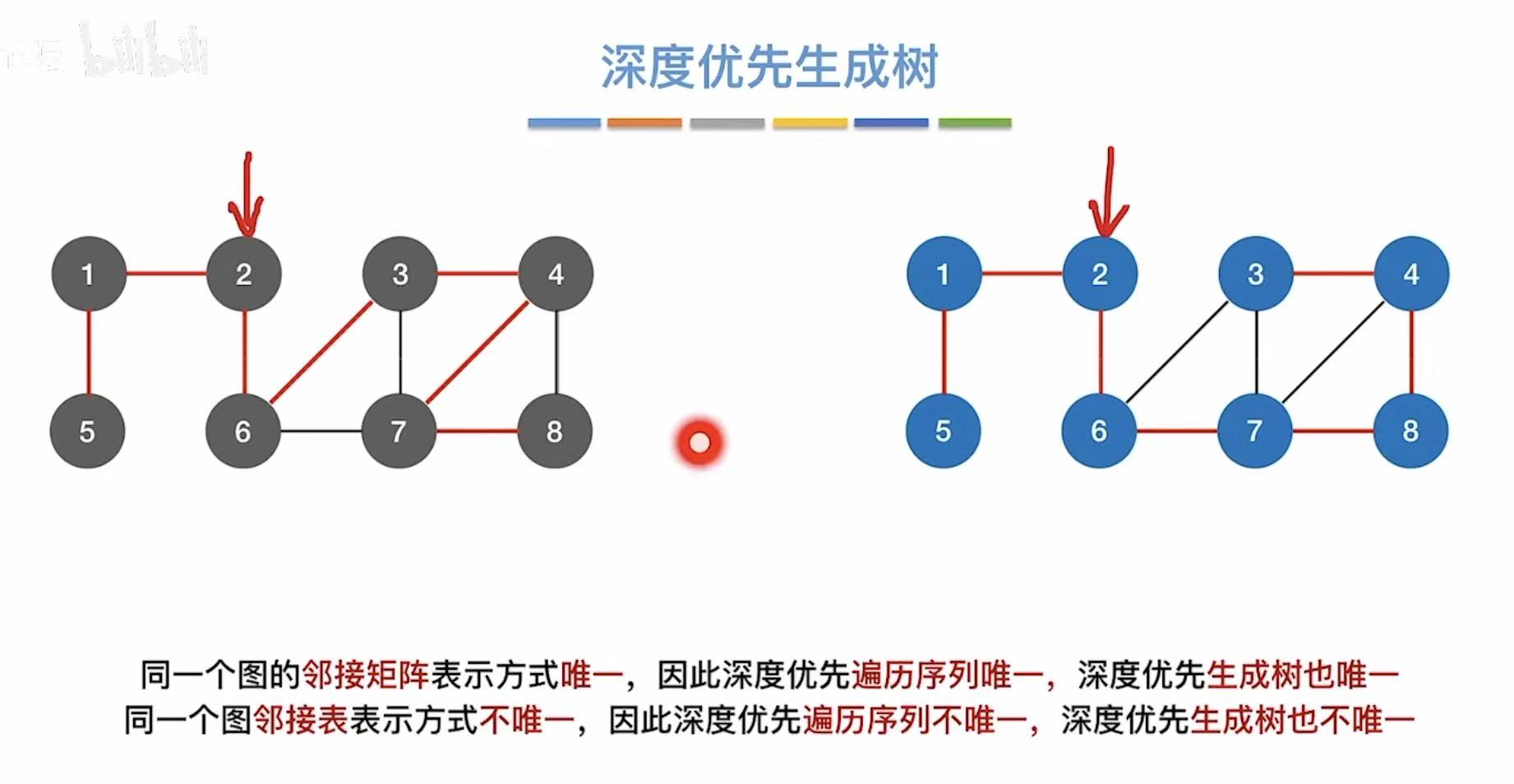
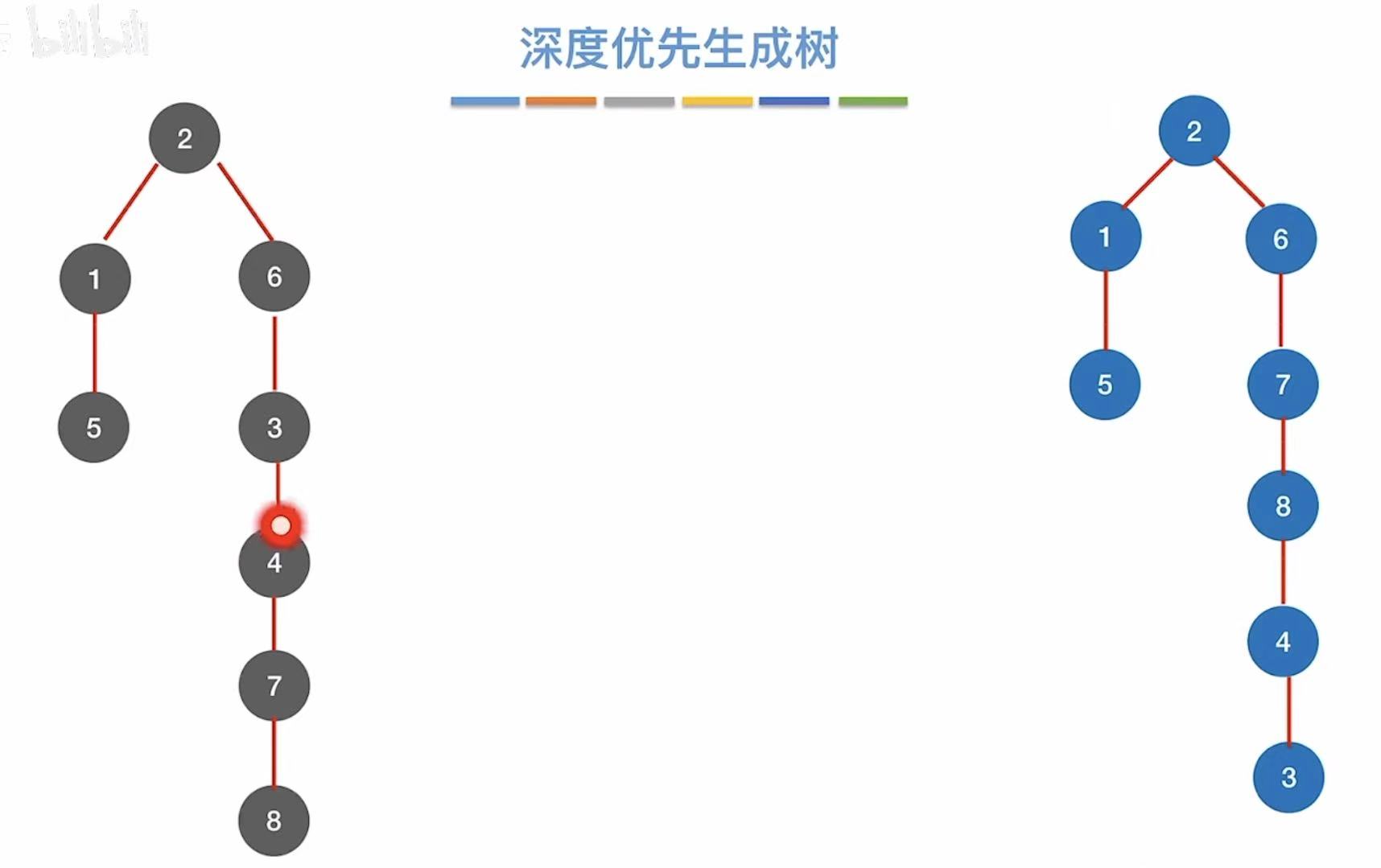
2.5 深度优先生成树
同上。
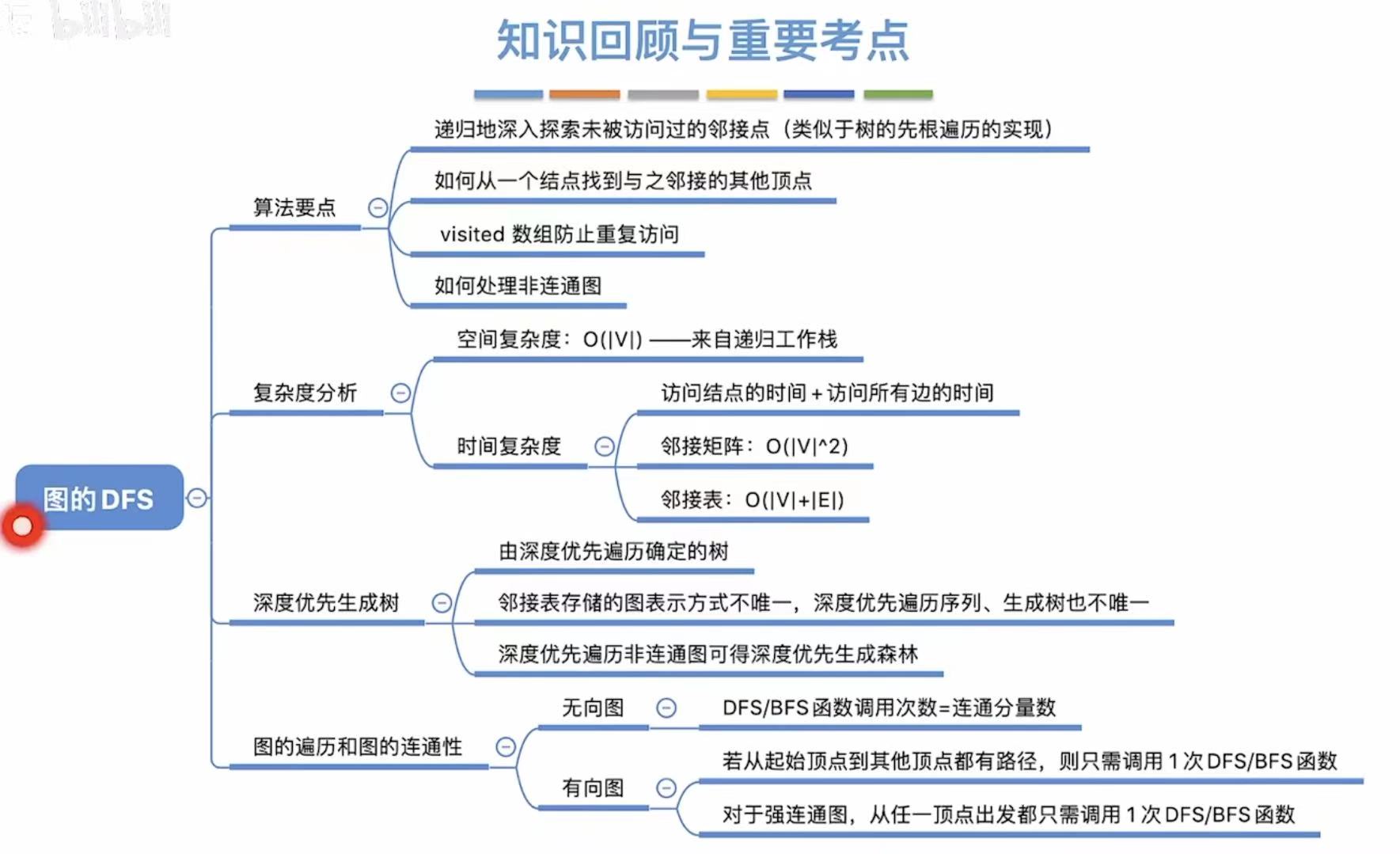
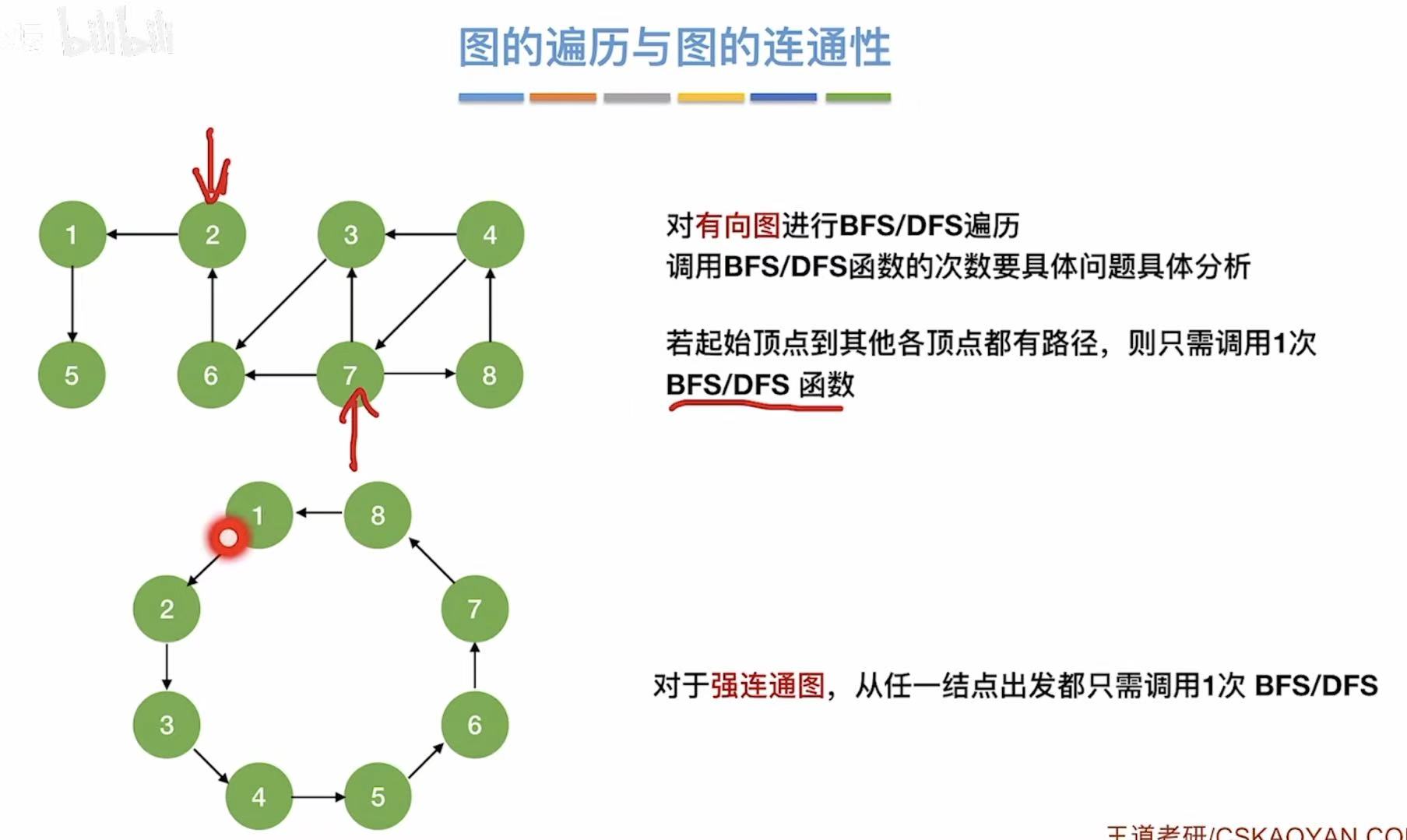
2.6 图的遍历与图的连通性
2.7 小结