一、简介
最清晰、最短、最本质 的推导,解释为什么:

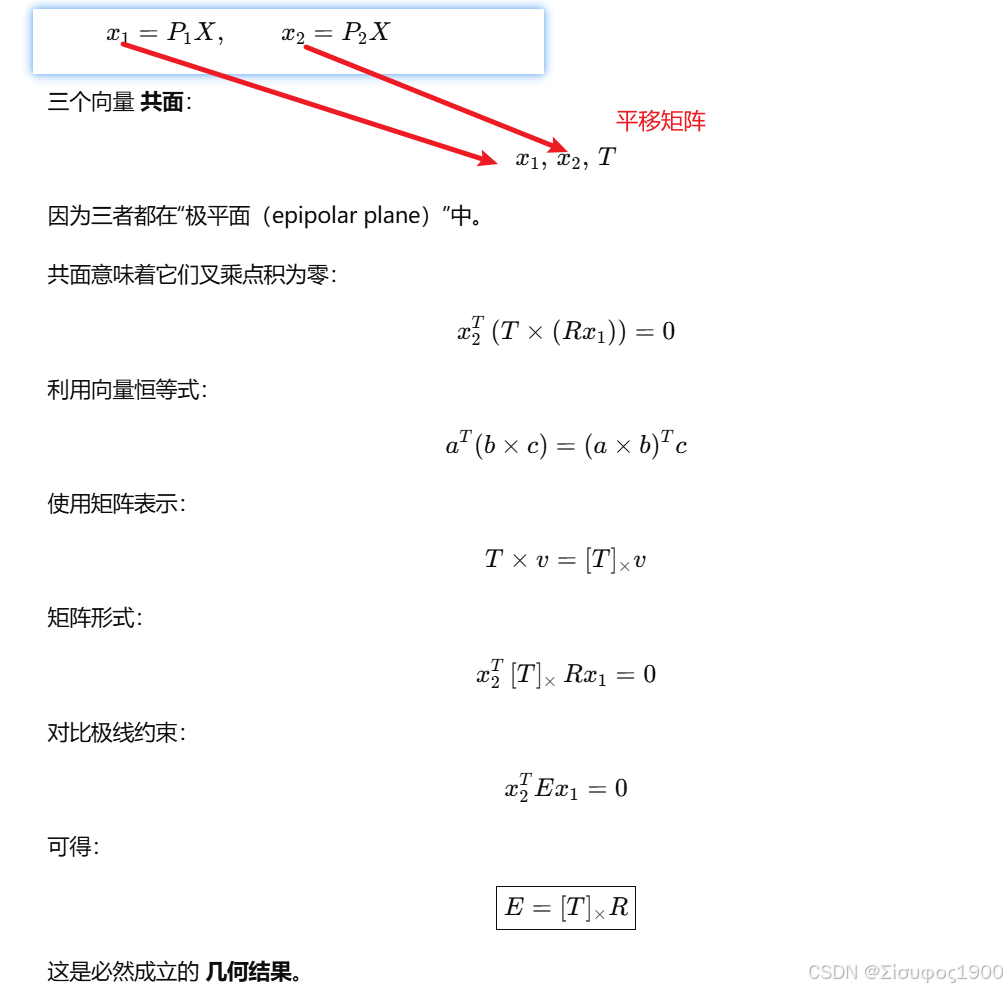
二、为什么 E = T× R?(严格数学推导)
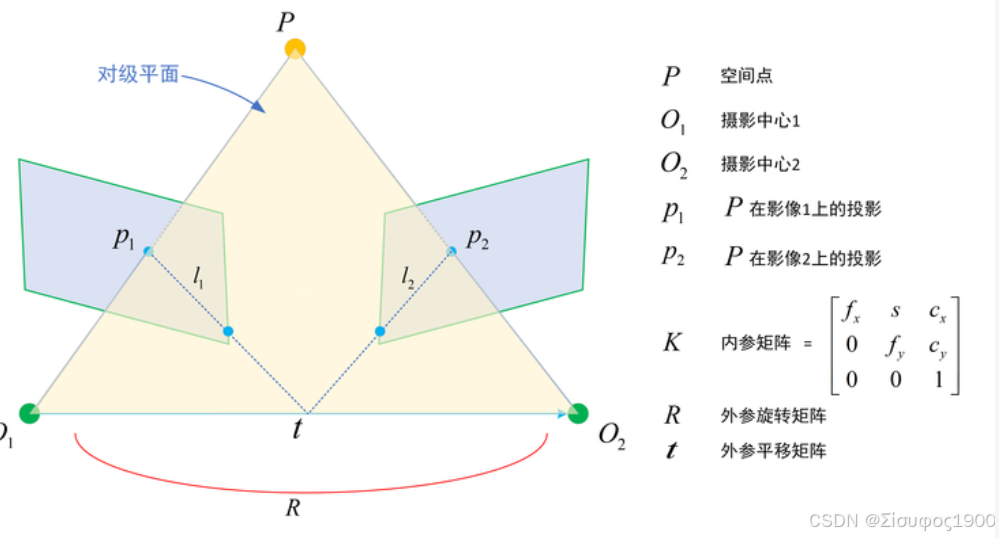
给定两个相机:
-
第一相机坐标系:C₁
-
第二相机坐标系:C₂
-
第二相机相对第一相机的姿态:
-
旋转:R
-
平移:T
-
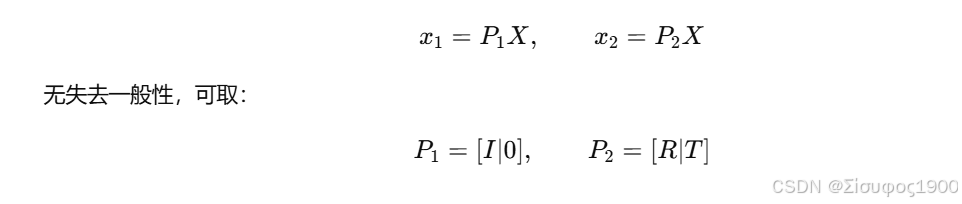
3D 点 X在两个相机的成像点满足:
几何约束:点、极线、极平面
三、Matlab 测试
计算本质矩阵E
cpp
%% 随机生成一个旋转矩阵 R
[U,~,V] = svd(randn(3,3));
R = U*V';
% 确保 det(R)=1
if det(R)<0
U(:,3) = -U(:,3);
R = U*V';
end
%% 随机平移 T(非零)
T = randn(3,1);
T = T / norm(T);
%% 构造叉乘矩阵 [T]×
Tx = [ 0 -T(3) T(2);
T(3) 0 -T(1);
-T(2) T(1) 0 ];
%% 按理论构造本质矩阵 E
E = Tx * R;
disp('E = [T]x R =');
disp(E)
cpp
%% ====== 数值验证:x2^T E x1 = 0 ======
% 随机生成空间 3D 点
X = randn(3,20);
% 第一相机投影
x1 = X ./ X(3,:);
% 第二相机投影:x2 = R*X + T
X2 = R * X + T;
x2 = X2 ./ X2(3,:);
% 验证 epipolar constraint
err = zeros(1,size(X,2));
for i = 1:size(X,2)
err(i) = x2(:,i)' * E * x1(:,i);
end
disp('数值误差(应接近 0):');
disp(err);
fprintf('\n最大误差: %.3e\n', max(abs(err)));
E = [T]x R =
-0.7750 0.5902 -0.1374
-0.5141 -0.7866 -0.3197
0.2064 -0.0104 0.0651
数值误差(应接近 0):
1.0e-14 *
列 1 至 11
-0.0056 -0.0652 0 -0.3553 0.0333 -0.0444 -0.0111 0 0 0.0888 -0.0042
列 12 至 20
-0.0222 -0.0444 0.0444 0.0139 -0.1332 0 -0.0087 0 -0.1332
最大误差: 3.553e-15