对RV1126进行CMOS摄像头采集,并进行VENC的视频编码处理,最终获取到H264码流。
1.RV1126 VI 模块采集并进行 VENC 编码的流程
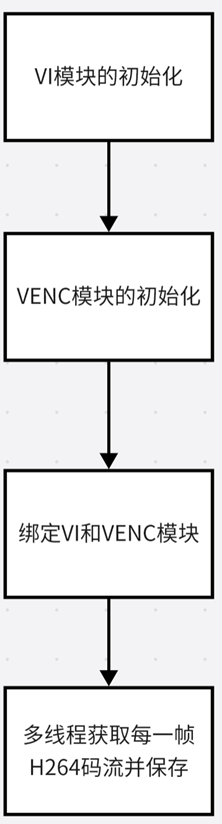
RV1126多线程采集VI模块编码VENC并保存到文件,一般分为四个步骤:分别是初始化VI模块、初始化VENC模块、绑定VI和VENC模块、多线程获取每一帧H264码流数
2.VENC基本函数
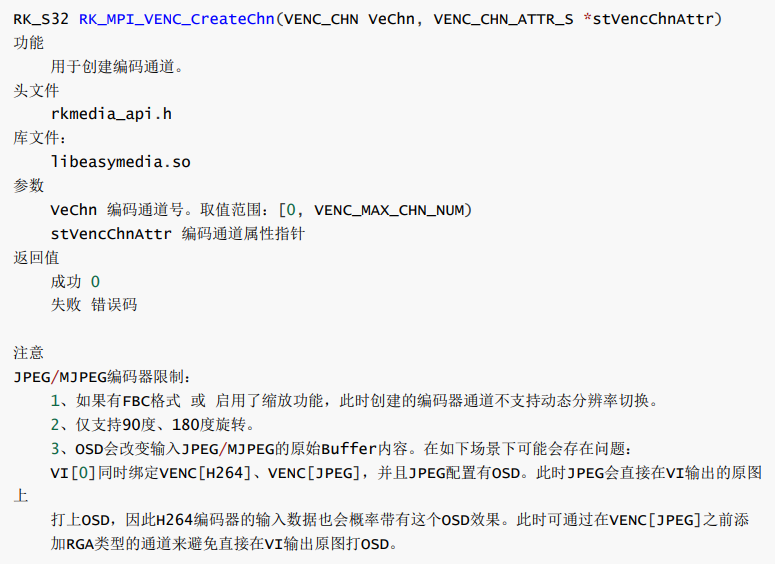
RK_MPI_VENC_CreateChn
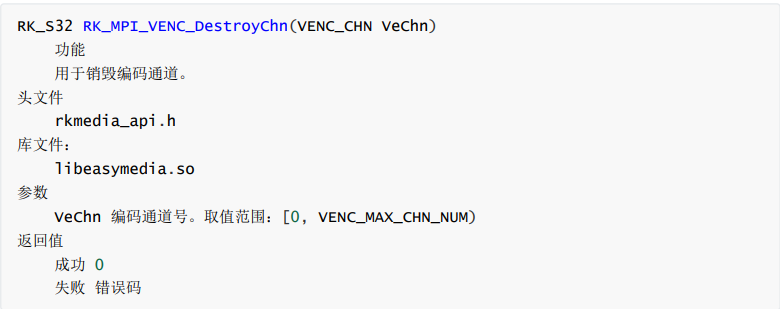
RK_MPI_VENC_DestroyChn
3.代码
cs
#include <assert.h>
#include <fcntl.h>
#include <getopt.h>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#include <unistd.h>
// #include "common/sample_common.h"
#include "include/rkmedia/rkmedia_api.h"
#define CAMERA_PATH "rkispp_scale0"
#define CAMERA_ID 0
#define VI_CHN 0
#define VENC_CHN 0
void *get_h264_venc_thread(void *args)
{
pthread_detach(pthread_self());
FILE* h264_file = fopen("test_venc.rv1126","w+");
MEDIA_BUFFER mb;
while(1)
{
mb = RK_MPI_SYS_GetMediaBuffer(RK_ID_VENC,VENC_CHN,-1);
if(!mb)
{
printf("RK_MPI_SYS_GetMediaBuffer Failed\n");
break;
}
else
{
printf("RK_MPI_SYS_GetMediaBuffer Success\n");
}
fwrite(RK_MPI_MB_GetPtr(mb),RK_MPI_MB_GetSize(mb),1,h264_file);
RK_MPI_MB_ReleaseBuffer(mb);
}
return NULL;
}
int main()
{
int ret;
VI_CHN_ATTR_S vi_chn_attr;
vi_chn_attr.pcVideoNode = CAMERA_PATH;
vi_chn_attr.enPixFmt = IMAGE_TYPE_NV12;
vi_chn_attr.u32Width = 1920;
vi_chn_attr.u32Height = 1080;
vi_chn_attr.enBufType = VI_CHN_BUF_TYPE_MMAP;
vi_chn_attr.u32BufCnt = 3;
vi_chn_attr.enWorkMode = VI_WORK_MODE_NORMAL;
ret = RK_MPI_VI_SetChnAttr(CAMERA_ID,VI_CHN,&vi_chn_attr);
if(ret)
{
printf("RK_MPI_VI_SetChnAttr Failed\n");
return 0;
}
else
{
printf("RK_MPI_VI_SetChnAttr Success\n");
}
ret = RK_MPI_VI_EnableChn(CAMERA_ID,VI_CHN);
if(ret)
{
printf("RK_MPI_VI_EnableChn Failed\n");
return 0;
}
else
{
printf("RK_MPI_VI_EnableChn Success\n");
}
VENC_CHN_ATTR_S venc_chn_attr;
venc_chn_attr.stVencAttr.enType = RK_CODEC_TYPE_H264;
venc_chn_attr.stVencAttr.bByFrame = RK_FALSE;
venc_chn_attr.stVencAttr.imageType = IMAGE_TYPE_NV12;
venc_chn_attr.stVencAttr.enRotation = VENC_ROTATION_0;
venc_chn_attr.stVencAttr.u32PicWidth = 1920;
venc_chn_attr.stVencAttr.u32PicHeight = 1080;
venc_chn_attr.stVencAttr.u32Profile = 66;
venc_chn_attr.stVencAttr.u32VirWidth = 1920;
venc_chn_attr.stVencAttr.u32VirHeight = 1080;
venc_chn_attr.stRcAttr.enRcMode = VENC_RC_MODE_H264CBR;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateNum = 25;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateNum = 25;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.u32BitRate = 8388608;
venc_chn_attr.stRcAttr.stH264Cbr.u32Gop = 25;
ret = RK_MPI_VENC_CreateChn(VENC_CHN,&venc_chn_attr);
if(ret)
{
printf("RK_MPI_VENC_CreateChn Failed\n");
return 0;
}
else
{
printf("RK_MPI_VENC_CreateChn Success\n");
}
MPP_CHN_S vi_chn_s;
vi_chn_s.enModId = RK_ID_VI;
vi_chn_s.s32ChnId = VI_CHN;
MPP_CHN_S vens_chn_s;
vens_chn_s.enModId = RK_ID_VENC;
vens_chn_s.s32ChnId = VENC_CHN;
ret = RK_MPI_SYS_Bind(&vi_chn_s,&vens_chn_s);
if(ret)
{
printf("RK_MPI_SYS_Bind Failed\n");
return 0;
}
else
{
printf("RK_MPI_SYS_Bind Success\n");
}
pthread_t pid;
pthread_create(&pid,NULL,get_h264_venc_thread,NULL);
while (1)
{
sleep(1);
}
RK_MPI_VI_DisableChn(CAMERA_ID,VI_CHN);
RK_MPI_VENC_DestroyChn(VENC_CHN);
RK_MPI_SYS_UnBind(&vi_chn_s,&vens_chn_s);
return 0;
}注:
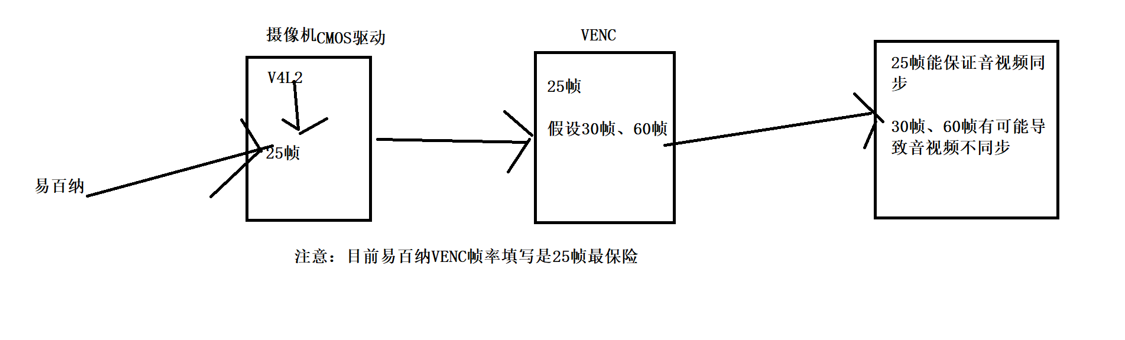
1.摄像头的帧率是25帧
2.码率单位换算
1 Kb = 1024 bit
1 KB = 1024 Byte
1 Mb = 1024 Kb
1 MB = 1024 KB
1 Byte = 8 bit
1 MB = 8Mb
1 Mb = 0.125 MB
1MBps = 1024kBps = 1024*1024Bps = 1024*1024*8bps = 8388608bps (比特率)
3.帧率计算
帧率 = Num / Dem
GOP是帧率的整数倍