https://robochallenge.cn/leaderboard
9 个能力维度本质上是对 VLA(Vision-Language-Action)模型的"能力解剖"。
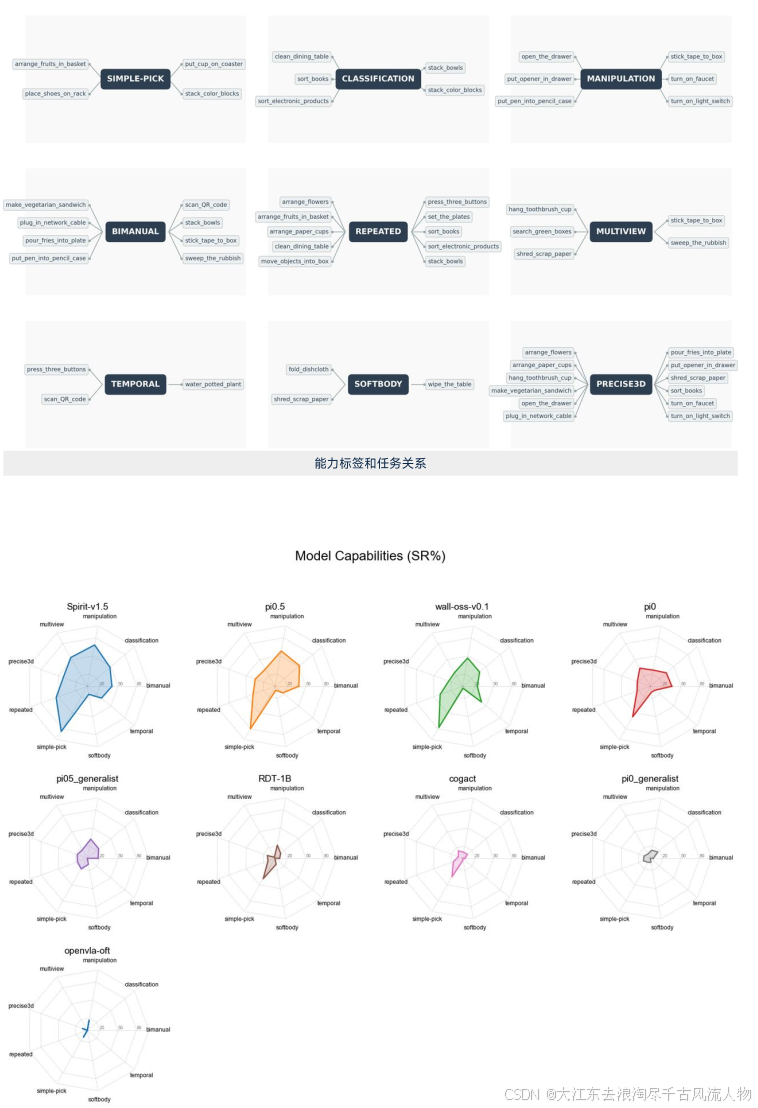
RoboChallenge 能力维度拆解表
| # | 能力类别 | 代表任务示例 | 核心测什么 | 技术本质 | 对应 VLA 内部模块 |
|---|---|---|---|---|---|
| 1 | Classification | sort_books stack_color_blocks | 视觉识别 + 语义理解 | 物体类别区分、指令理解、语义对齐 | Vision Encoder + Language Alignment |
| 2 | Simple-pick | put_cup_on_coaster stack_color_blocks | 基础抓取与放置能力 | 抓取点预测、位姿估计、控制精度 | Grasp Head + Pose Prediction |
| 3 | Manipulation | open_drawer stick_tape_to_box | 连续状态控制能力 | 接触动力学、状态转移建模、连续动作生成 | Policy Head(连续控制) |
| 4 | Temporal | press_three_buttons water_potted_plant | 长时记忆 + 状态跟踪 | 任务阶段记忆、latent state 保持、避免动作幻觉 | Transformer Memory / Recurrent State |
| 5 | Softbody | fold_dishcloth | 软体物理建模能力 | 非刚体形变建模、受力预测、不可逆状态变化 | Implicit Physics Modeling |
| 6 | Precise3D | arrange_paper_cups | 三维空间精度 | 深度感知、IK 精度、误差积累控制 | Depth Modeling + Control Precision |
| 7 | Bimanual | 双臂协同任务 | 多体协调能力 | 两臂空间冲突规避、动作同步 | Multi-Agent / Multi-Arm Control |
| 8 | Repeated | 重复执行类任务 | 稳定性与鲁棒性 | 多次成功率、一致性、误差收敛 | Robustness / Policy Stability |
| 9 | Multiview | 多视角感知任务 | 多传感器融合能力 | 视角对齐、空间融合、场景一致性 | Perception Fusion Module |
零、从系统角度抽象一层
如果压缩成机器人完整 pipeline 对应关系:
| Pipeline 阶段 | 对应能力类别 |
|---|---|
| 感知 / 识别 | Classification |
| 抓取执行 | Simple-pick |
| 连续控制 | Manipulation |
| 任务记忆 | Temporal |
| 物理理解 | Softbody |
| 精度控制 | Precise3D |
| 协同控制 | Bimanual |
| 稳定性 | Repeated |
| 传感融合 | Multiview |
为什么任务设置为这几类?核心是关注哪些能力?(比如 分类是关注 识别的能力 ?),从"评测哲学"和"技术本质"两个层面拆解。
一、为什么要做能力分类?
RoboChallenge 的目标不是单纯排个总榜,而是:
回答:模型到底"会什么"?不会什么?
如果只看 SR(成功率),你只能知道:
- 模型 A:50%
- 模型 B:45%
但你不知道:
- A 是操作强?还是理解强?
- B 是抓取强?还是记忆强?
所以他们设计了能力标签体系(你图里那 9 类)。
这本质是:
把 VLA 模型拆解成「感知-理解-规划-控制」几个能力轴。
二、这几类能力到底在测什么?
按能力维度给你拆解核心关注点。
1️⃣ Classification(分类)
代表任务:sort_books、stack_color_blocks
核心测什么?
👉 视觉识别 + 语义理解能力
模型需要:
- 区分不同类别物体
- 识别目标物
- 根据语义做决策
技术上考察:
- VLM encoder 的视觉语义对齐能力
- embedding 的区分度
- 指令理解能力
⚠ 这里基本不考操作难度,主要是认知能力。
2️⃣ Simple-pick(简单抓取)
代表任务:put_cup_on_coaster、stack_color_blocks
核心测什么?
👉 基础 grasp & place 能力
技术核心:
- 物体检测
- 抓取点预测
- 位姿控制精度
这类任务类似机器人界的:
Hello World
3️⃣ Manipulation(复杂操作)
代表任务:open_drawer、stick_tape_to_box
核心测什么?
👉 连续动作生成能力
技术本质:
- 物体状态变化建模
- 关节空间连续控制
- 接触动力学理解
这是从"点对点抓取"升级到:
状态转移控制
4️⃣ Temporal(时序依赖)
代表任务:press_three_buttons、water_potted_plant
核心测什么?
👉 长时记忆 + 状态跟踪
技术考察:
- 是否有 memory token
- 是否能保持 latent state
- 是否出现"动作幻觉"
你报告里的 water_potted_plant 失败,本质是:
中间状态丢失,policy 失控
5️⃣ Softbody(软体操作)
代表任务:fold_dishcloth
核心测什么?
👉 物理建模能力
软体难在哪里?
- 非刚体
- 不可预测形变
- 受力不可逆
这对 VLA 是指数级难度提升。
6️⃣ Precise3D(三维精度)
代表任务:arrange_paper_cups
核心测什么?
👉 空间精度 + 位姿控制误差积累
技术考察:
- 深度感知质量
- IK 精度
- 控制 jitter 稳定性
7️⃣ Bimanual(双臂协同)
核心测什么?
👉 多体协调
难点:
- 两臂空间冲突避免
- 动作同步
- 双流 policy 协调
8️⃣ Repeated(重复执行)
核心测什么?
👉 稳定性
不是做一次成功,而是:
连续多次成功
这是鲁棒性测试。
9️⃣ Multiview(多视角)
核心测什么?
👉 多相机融合能力
是否真正用视觉推理,而不是"记忆场景"。
三、这套分类的真正核心
如果你从算法角度看,它本质在测:
| 能力类别 | 对应 VLA 内部模块 |
|---|---|
| Classification | Vision encoder + language alignment |
| Simple-pick | grasp head + pose prediction |
| Manipulation | policy head |
| Temporal | transformer memory |
| Softbody | physics implicit modeling |
| Precise3D | depth modeling + control precision |
| Bimanual | multi-agent control |
| Repeated | robustness |
| Multiview | perception fusion |
所以它其实是在拆解:
一个 VLA 模型的内部能力分布图
这也是你看到雷达图的意义。
四、为什么不按"任务分类",会出现什么问题?
假设我们按任务类别分:
厨房类任务
清洁类任务
收纳类任务
抓取类任务
装配类任务
听起来很直观,但问题是:
❌ 任务是"表象"
✅ 能力才是"本质"
举个例子:
做三明治(make_vegetarian_sandwich)
它属于"厨房任务",但它其实同时包含:
识别能力(分类)
抓取能力(simple pick)
双臂协同(bimanual)
精确3D定位(precise3d)
严格顺序(temporal)
如果按"厨房任务"分类,你根本不知道模型失败是因为:
不会识别番茄?
抓不稳?
双臂协调崩了?
记忆丢了?
所以:
任务分类不能诊断能力瓶颈。
五、从行业视角看,这种分类的战略意义
RoboChallenge 想解决一个核心问题:
当前 VLA 到底是"理解强"还是"操作强"?
从数据看:
- Classification 不差
- Simple-pick 很强
- Softbody 接近 0
- Temporal 很差
这说明:
当前模型更像"看得懂的抓取器",而不是"真正理解物理世界的智能体"。
六、你如果站在 SLAM / 机器人算法角度看
你会发现:
这个标签体系其实和机器人 pipeline 强相关:
感知 → 识别 → 位姿估计 → 规划 → 控制 → 反馈
而每个标签对应 pipeline 的某一环节。
七、总结
这些能力标签在回答一个关键问题:
具身模型到底在哪个环节出问题?
分类测认知
simple-pick 测抓取
manipulation 测状态控制
temporal 测记忆
softbody 测物理理解
它本质是一个"模型能力解剖系统"。