在智慧农业、工业控制等实际项目中,PIC16F1947 成为我近年来高频使用的核心芯片。其丰富的外设与双串口设计,非常适合构建多通道通信与控制系统。本次我将以一款实际投产数年的控制板为例,详解其电流互感器(5A/10A)数据采集。
该控制板集成了以下8大功能,覆盖多数物联网与工控场景:
1、6路继电器输出;
2、2路DC24V或12V直流电机正反转控制;
3、1路4G模块数据收发;
4、1路LORA无线数据收发或RS485数据收发;
5、2路无源开关量输入;
6、1路电流互感器(5A/10A)数据采集;
7、1路数模转换(数字量转4-20mA/0-5V/0-10V);
8、1路模数转换(4-20mA/0-5V/0-10V转数字量)。
一、 4-20mA/0-5V/0-10V**采集硬件电路:**
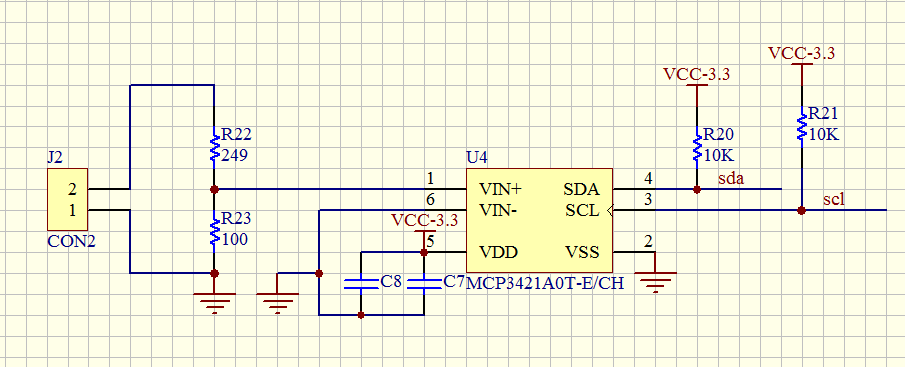
上图J2是4-20mA/0-5V/0-10V输入,为了电流电压输入通用,R22、R23是分压电阻,如果是4-20mA 输入,可采用图中的阻值,如果是0-5V或0-10V,R22、R23阻值最好都大于1K,不至于电流过大,可以自己计算两个阻值,保证VIN+输入在2V以内就可以, U4是18位A/D芯片MCP3421,VIN+、VIN-用作差分输入时可以到18位精度,VIN-接GND时可以到17位精度,R20、R21是两个10K上拉电阻,通过设置MCP3421寄存器可使参考电压为2.048V。
二、例程:
以下是采集示例(PIC16F1947采用16M主频),具体程序如下:
#include<pic16f1947.h>
__CONFIG(0x007c); //内部时钟16M
__CONFIG(0x1010); //内部时钟16M
unsigned char dres_485=1,sec_5s=0,half_sec=0 ,flag_rev=0,flag_rev2=0,leijia_tnt2,elecl,elech,elechh;unsigned int time_tnt,time_tnt2,sec_05s,rev_rnt=0,rev_rnt2=0,tran_rnt=0,tran_rnt2=0,sec_1s=0; unsigned char eeprom_e2[30]; //EEPROM缓存unsigned long result_3421[30];unsigned char trans[50];unsigned char reciv[200]; //串口1接收缓存unsigned char reciv2[200]; //串口2接收缓存#define SDA RE3 //电流采集数据I/O#define SCL RE2 //电流采集时钟I/O#define byte unsigned charvoid delay(unsigned int v){ while(v!=0)v--;}void somenop(void){ asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); } void I2CStart(void) { TRISE3=0; SDA=1; somenop(); SCL=1; somenop(); somenop(); SDA=0; somenop(); somenop(); SCL=0; somenop(); } void I2CStop(void) { SCL=0; somenop(); SDA=0; somenop(); somenop(); SCL=1; somenop(); somenop(); SDA=1; somenop(); // TRISC6=1; } void WaitAck(void) { unsigned char i=20; TRISE3=1; SDA=1; somenop(); SCL=1; /* lpp: if(SDA==0) { rc_flag=64; } else { SCL=0; somenop(); somenop(); SCL=1; somenop(); SCL=0; goto lpp; } */ while(i--){ if(SDA==1) { SCL=0; somenop(); somenop(); SCL=1; } else goto loop; } loop: SCL=0; somenop(); TRISE3=0; return; } void SendAck(void) { SDA=0; somenop(); SCL=1; somenop(); somenop(); SCL=0; somenop(); } void SendNotAck(void) { SDA=1; somenop(); SCL=1; somenop(); somenop(); SCL=0; somenop(); } void I2CSendbyte(byte ch) { unsigned char i=8; TRISE3=0; while(i--) { SCL=0; somenop(); if((ch&0x80)!=0) { SDA=1; } else SDA=0; ch<<=1; somenop(); SCL=1; somenop(); somenop(); } SCL=0; somenop(); } byte I2CRecebyte(void) { unsigned char i=8; byte ddata=0; TRISE3=1;// SDA=1; while(i--){ ddata<<=1; SCL=0; somenop(); SCL=1; somenop(); somenop(); ddata|=SDA; } SCL=0; somenop(); TRISE3=0; return ddata; } void WRITE_MCP3421(unsigned char wr_data) { I2CStart(); I2CSendbyte(0xd0); WaitAck(); I2CSendbyte(wr_data); WaitAck(); I2CStop(); } void READ_MCP3421(void) { I2CStart(); I2CSendbyte(0xd1); WaitAck(); elechh=I2CRecebyte(); SendAck(); elech=I2CRecebyte(); SendAck(); elecl=I2CRecebyte(); SendAck(); mcp_busy=I2CRecebyte(); SendNotAck(); I2CStop(); }void interrupt isr(void){ if(TMR1IF) { TMR1L=0xbf; TMR1H=0xf9; sec_05s+=1; sec_1s+=1; if(sec_05s>624) //0.5s { half_sec+=1; sec_5s+=1; sec_05s=0; } TMR1IF=0; } }void main(){ unsigned int i,j; unsigned char tmp; ANSELF=0; ANSELG=0;// ADCON0=0; TRISC=0x80; TRISB=0x87; OPTION_REG&=0X7F; WPUB7=1; TRISD=0x00; TRISE=0x00; TRISF=0x00; TRISG=0x0c;// TRISG=0x00; PORTC=0x38; PORTD=0x00; PORTE=0x00; PORTF=0x00; PORTG=0x00;// OSCCON=0x0; OSCSTAT=0xa0; OSCCON=0x78; //内部时钟16M// OSCCON=0xf0; //32M// OSCSTAT=0xf0;//32M PIE1=0x21; INTCON=0x00; T1CON=0x70; TMR1IF=0; TMR1L=0xbf; //0.8ms TMR1H=0xf9; TMR1IE=1; T1CON=0x71; PEIE=1;GIE=1;while(1) { asm("clrwdt"); if(sec_5s>3) //2秒采集一次 { WRITE_MCP3421(0x8c); //设置17位A/D,参考电压2.048V delay(10); READ_MCP3421(); result_3421[1]=elechh; result_3421[1]<<=8; result_3421[1]|=elech; result_3421[1]<<=8; result_3421[1]|=elecl; //根据采集数据计算电流或电压} }}三、本系列文章规划
《PIC单片机进阶实战》系列共六篇,后续将逐步展开以下内容:
|----|-------------------|---------------------------|
| 序号 | 主题 | 内容概要 |
| 1 | UART 通信 | 双串口配置、波特率转换、数据透传 |
| 2 | 4G 模块数据收发 | AT指令控制、4G模块数据透传 |
| 3 | 电流互感器数据采集 | 5A、10A电流采集 |
| 4 | 数模转换 | 12位模拟量输出4-20mA/0-5V/0-10V |
| 5 | 输入输出 | 开关量输入、控制继电器与直流电机 |
| 6 | 模数转换 | 4-20mA/0-5V/0-10V模拟量采集 |
附:《 PIC 单片机入门实战》共 8 篇文章与《 PIC 单片机进阶实战》共 6 篇文章内容来源于我自己画的电路原理图及程序,有对 PIC 单片机感兴趣想学习的朋友可以关注我,免费赠送资料(包括原理图、数据手册、各种例程等)。
有需要这两款控制板的朋友也可以关注联系我。
后续干货不断,咱们一起在单片机的世界里,共同进步。