前言:
在掌握二叉搜索树的基础上,我们发现其存在显著缺陷:若插入数据有序,二叉搜索树会退化为单链表,此时增删查改的时间复杂度从
O(logN)骤降为O(N)。为解决这一问题,G.M.Adelson-Velsky和E.M.Landis在 1962 年提出了AVL 树------ 一种自平衡的二叉搜索树。AVL 树的核心是在二叉搜索树的基础上引入
平衡因子和旋转机制,强制让树的任意节点左右子树高度差不超过 1,从而将树的高度严格控制在O(logN),保证所有操作的时间复杂度稳定在O(logN)。
一、AVL树的概念
1.1 平衡因子
AVL 树定义平衡因子(BF)= 右子树高度 - 左子树高度 ,且要求任意节点的平衡因子只能是 -1、0、1。
- 平衡因子为 0:节点左右子树高度相等(最优状态);
- 平衡因子为 1:右子树比左子树高 1 层;
- 平衡因子为 - 1:左子树比右子树高 1 层;
- 平衡因子为 ±2:树失衡,必须通过旋转调整
注:偶数个节点的 AVL 树(如 2、4 节点)无法做到所有节点平衡因子为 0,此时允许高度差为 1,这是 AVL 树的「最优妥协」。
1.2 AVL 树的特性
- 继承二叉搜索树的核心规则:
左子树所有节点值 < 根节点值 < 右子树所有节点值 - 自平衡特性:插入 / 删除后若失衡,通过旋转恢复平衡
- 高度严格可控,接近完美二叉树
二、AVL 树的结构设计
2.1 AVL树的结构
对比二叉搜索树,AVL 树的节点需要新增父节点指针和平衡因子,同时支持键值对存储(更贴近实际应用场景)
二叉搜索树节点(对比参考):
cpp
// 二叉搜索树节点结构
template<class K>
struct BSTNode
{
K _key; // 节点存储的关键码
BSTNode<K>* _left; // 左孩子节点指针
BSTNode<K>* _right; // 右孩子节点指针
// 构造函数:初始化节点
BSTNode(const K& key)
:_key(key)
, _left(nullptr)
, _right(nullptr)
{
}
};AVL 树节点:
cpp
template<class K, class V>
struct AVLTreeNode
{
pair<K, V> _kv; // 键值对(实用化改造)
AVLTreeNode<K, V>* _left; // 左孩子
AVLTreeNode<K, V>* _right; // 右孩子
AVLTreeNode<K, V>* _parent; // 父节点(旋转时需回溯)
int _bf; // 平衡因子(初始为0)
// 构造函数简化(直接初始化键值对)
AVLTreeNode(const pair<K, V>& kv)
:_kv(kv)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0)
{ }
};三、AVL 树的核心实现
3.1 插入操作(核心)
AVL 树插入分为二叉搜索树规则插入 -> 更新平衡因子 -> 失衡则旋转三步,是整个AVL树的核心逻辑。
3.1.1 插入流程梳理
- 基础插入:按二叉搜索树规则找到插入位置,创建新节点并链接父节点;
- 平衡因子更新:从插入节点的父节点开始向上回溯,更新每个祖先节点的平衡因子;
- 平衡检查 :
- 若平衡因子为 0:子树高度未变化,停止回溯;
- 若平衡因子为 ±1:子树高度增加,继续向上回溯;
- 若平衡因子为 ±2:树失衡,执行旋转调整,停止回溯。
3.1.2 更新平衡因子
更新原则:
- 平衡因子 = 右子树高度 - 左子树高度
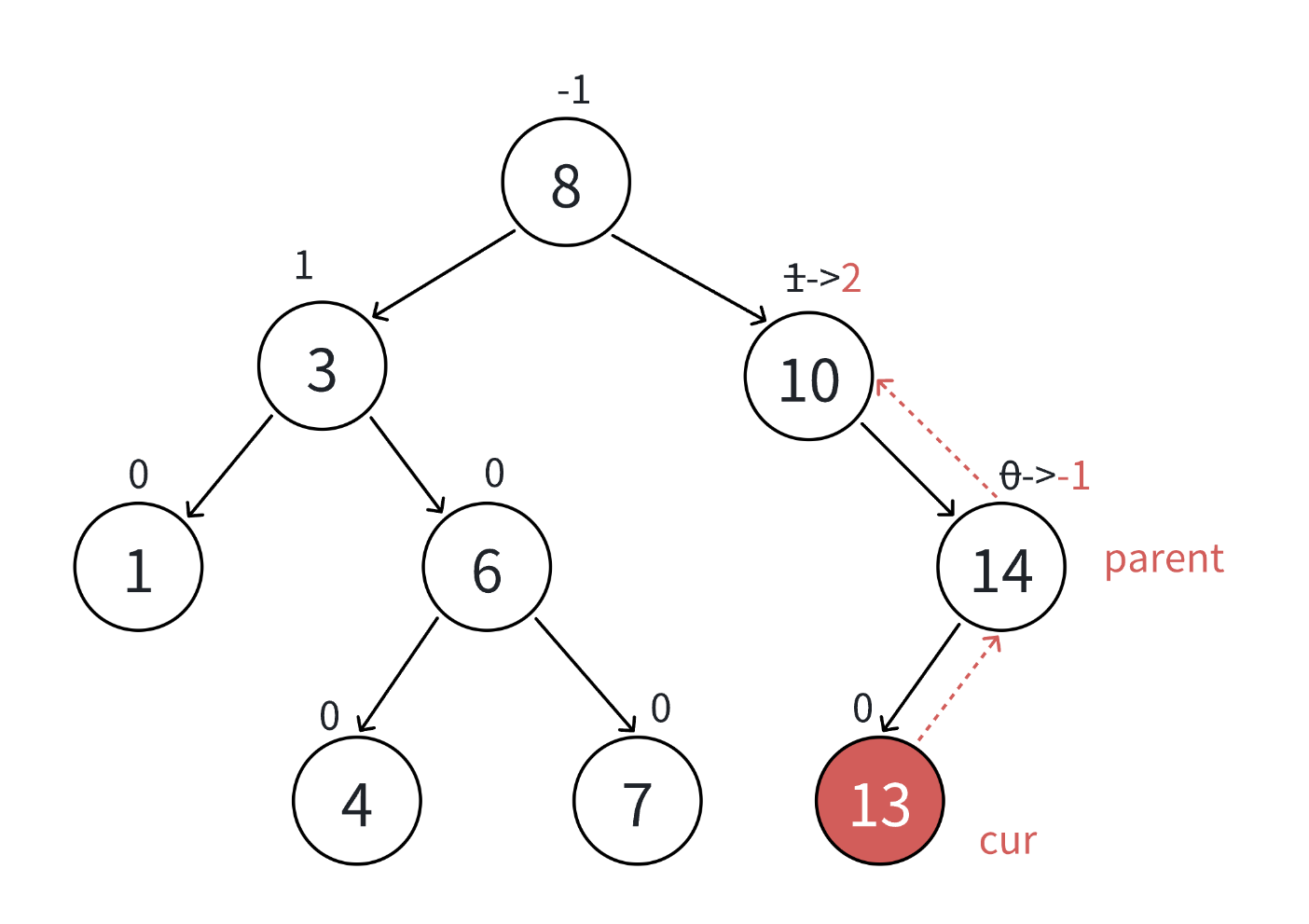
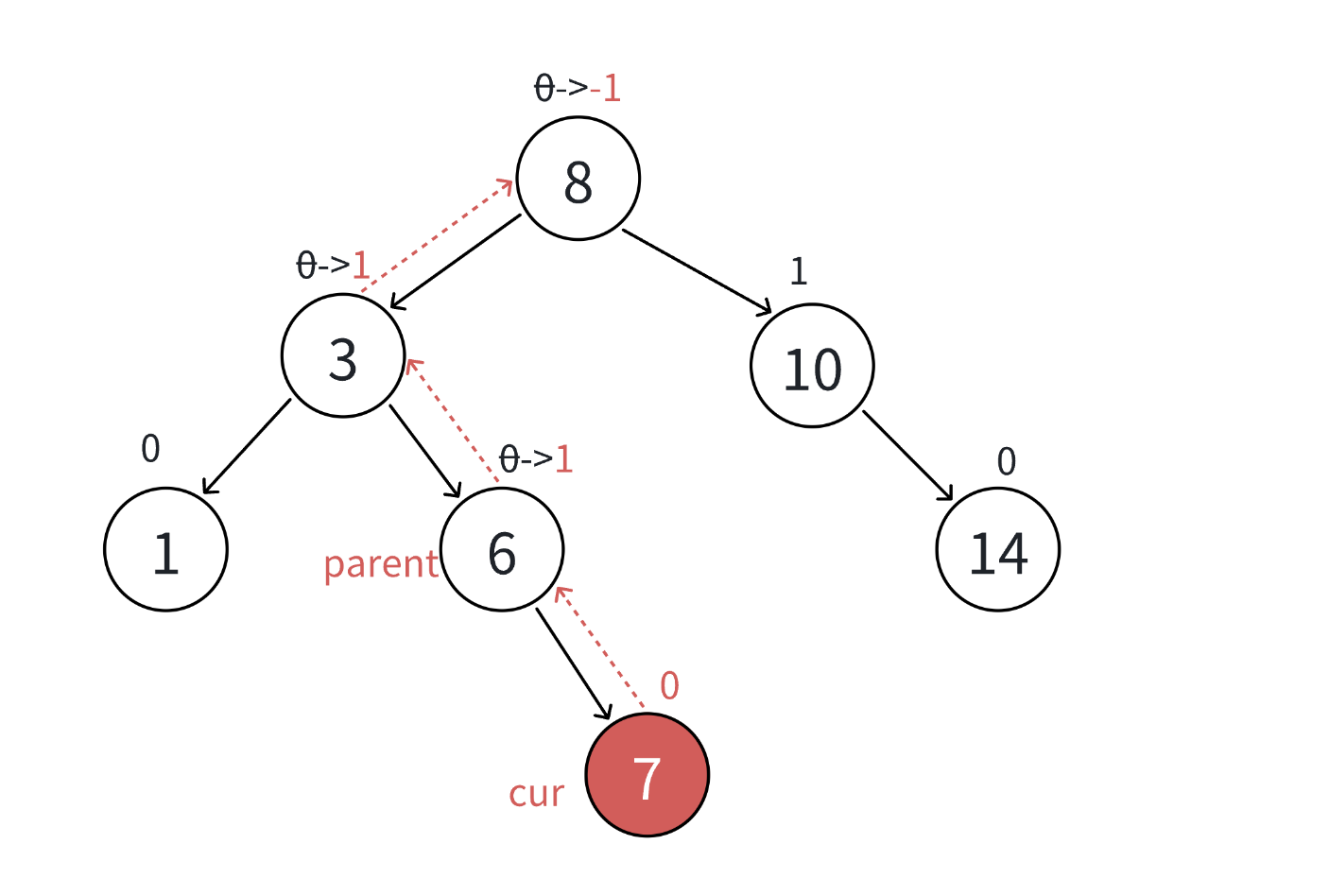
- 插入节点,会增加子树高度而影响当前平衡因子,节点插入右子树,parent的平衡因子++,反之亦然
- parent所在子树的高度是否变化决定了是否会继续往上更新
更新停止条件:
- 更新后parent的平衡因子为0,节点的左子树和右子树一样高
- 更新后parent的平衡因子由
0->1 / 0->-1,插入前一样高的树,当平衡因子为1时,节点插入右子树,反之亦然 - 更新后parent平衡因子为
2或-2,平衡已被破坏,需要旋转降低树的高度
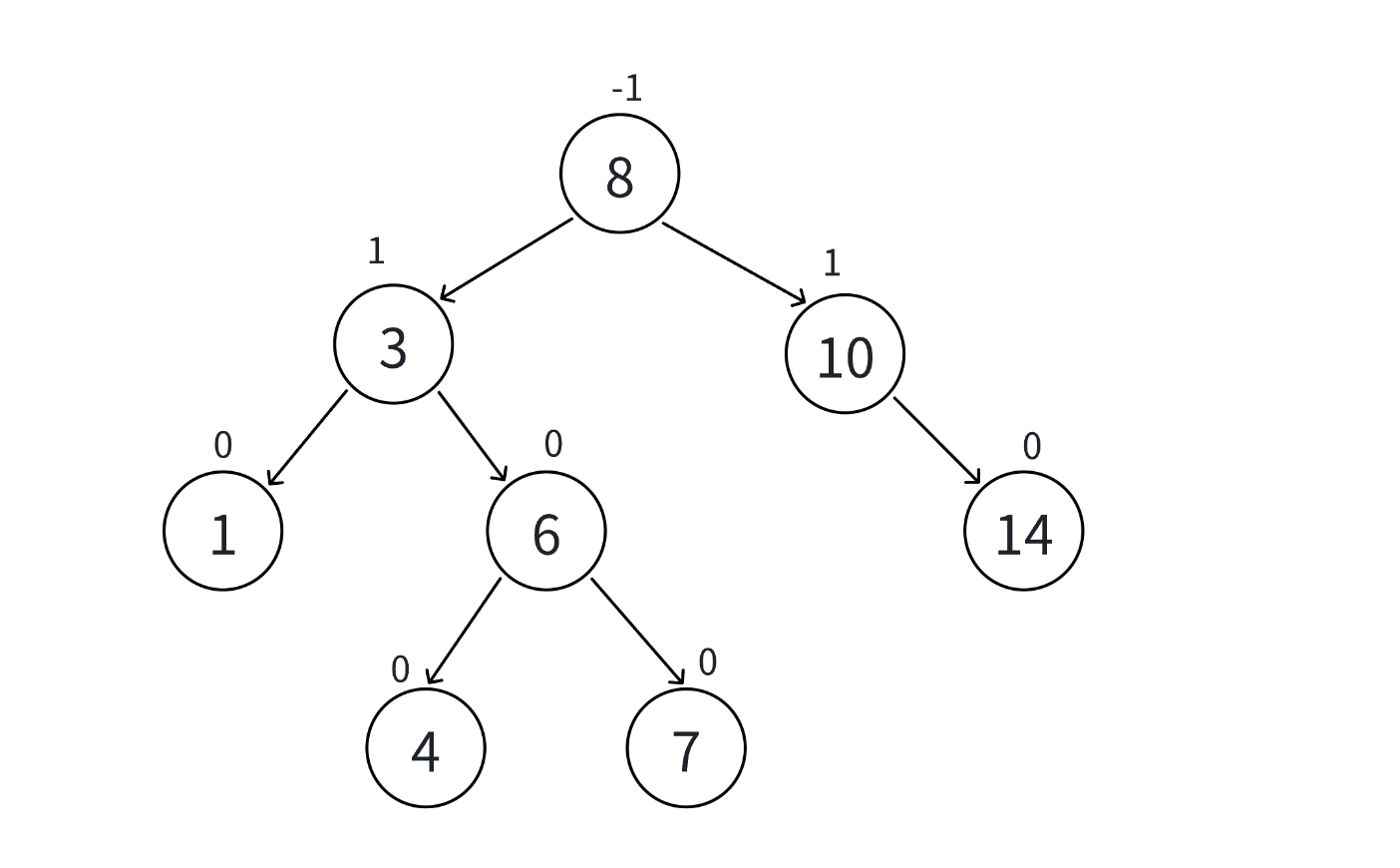
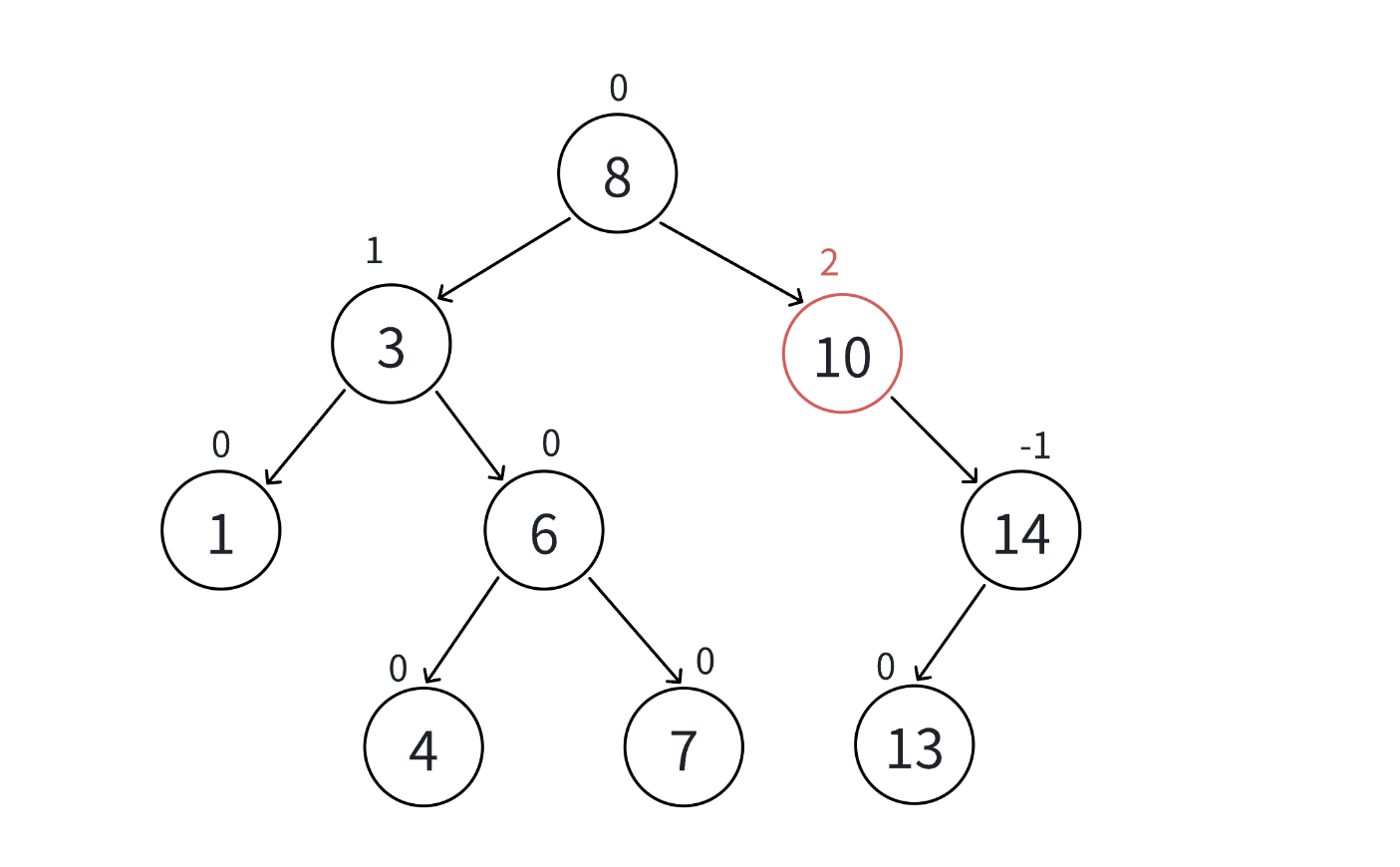
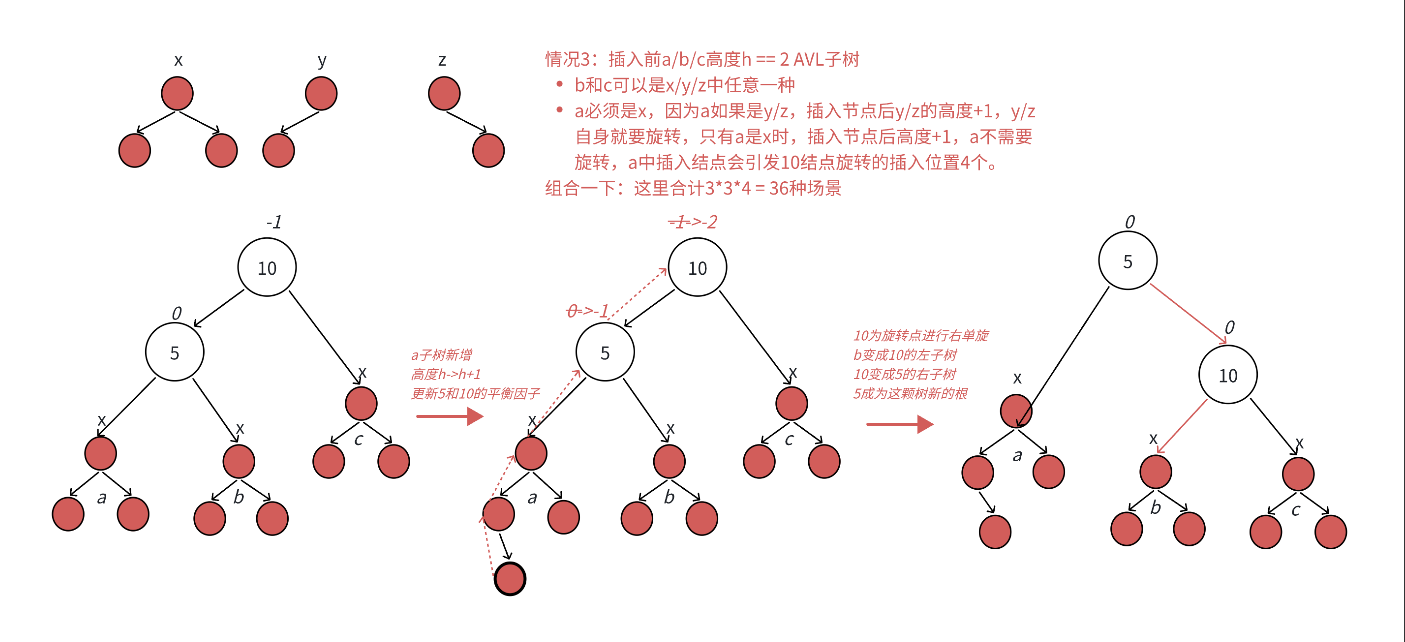
更新到10节点,平衡因子为2,10所在的子树已不平衡,需要旋转处理
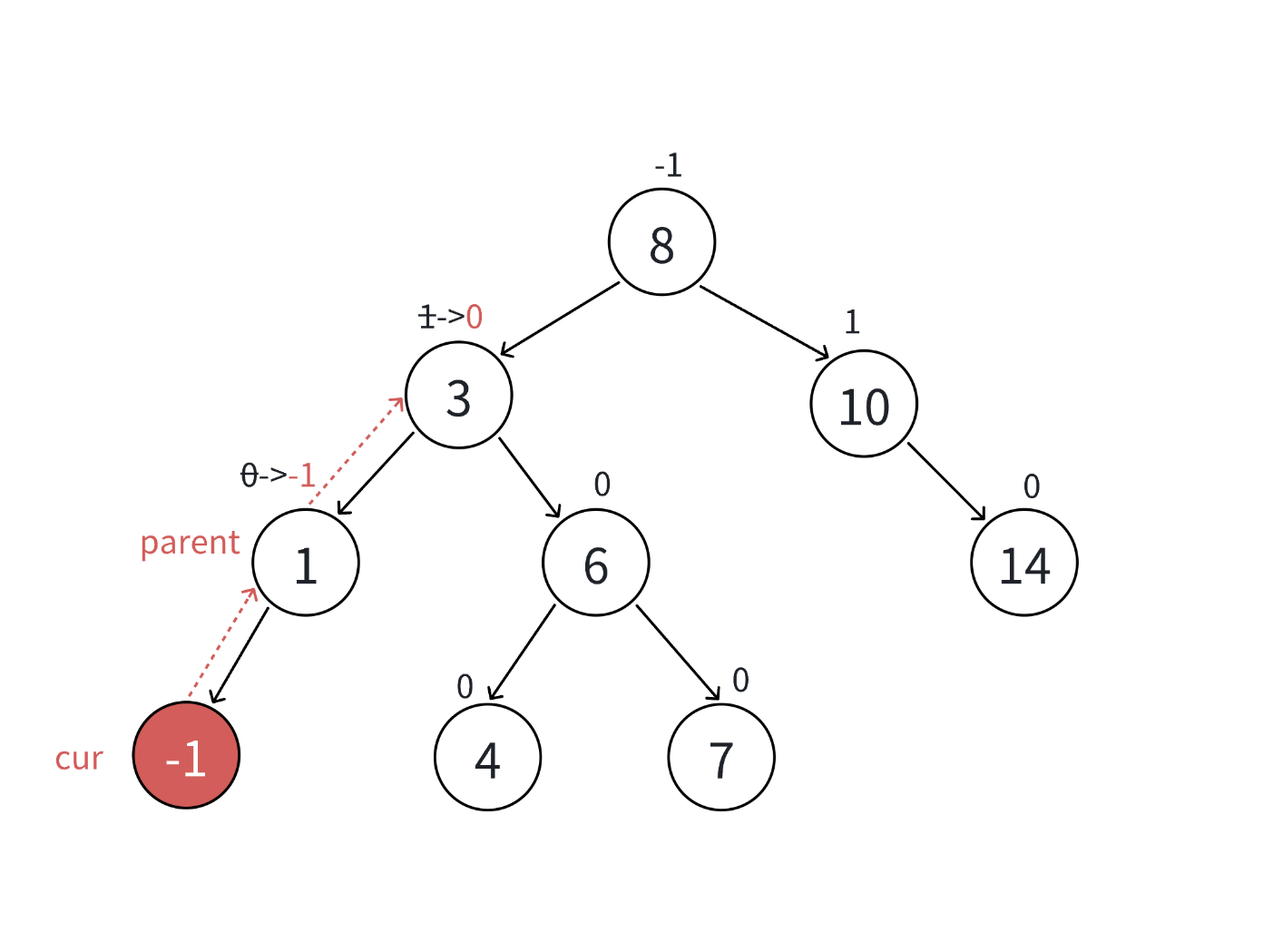
更新到中间节点,3为根的子树高度不变,不会影响上一层,更新结束
最坏更新到根停止
3.1.3 插入节点及更新平衡因子的代码实现
cpp
template<class K, class V>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;
private:
Node* _root = nullptr; // 根节点初始化
public:
bool Insert(const K& key, const V& value)
{
// 1. 空树直接插入根节点
if (_root == nullptr)
{
_root = new Node(make_pair(key, value));
return true;
}
// 2. 非空树:按BST规则找插入位置
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (cur->_kv.first < key) // 键值对比(修正原_kv直接比较的错误)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > key)
{
parent = cur;
cur = cur->_left;
}
else
{
// 键已存在,插入失败(符合set/map的特性)
return false;
}
}
// 3. 创建新节点并链接到父节点
cur = new Node(make_pair(key, value));
if (parent->_kv.first < key)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent; // 维护父节点指针
// 4. 回溯更新平衡因子 + 平衡检查
while (parent)
{
// 4.1 更新当前父节点的平衡因子
if (cur == parent->_left)
parent->_bf--; // 左子树新增节点,BF-1
else
parent->_bf++; // 右子树新增节点,BF+1
// 4.2 平衡因子状态判断
if (parent->_bf == 0)
{
// 平衡因子归0:子树高度未变,无需继续回溯
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
// 平衡因子从0→±1:子树高度增加,继续向上更新
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
// 失衡:根据失衡类型旋转
if (parent->_bf == 2)
{
// 右子树过高:分两种情况
if (cur->_bf == 1)
{
// 右单旋(直线型失衡)
RotateL(parent);
}
else // cur->_bf == -1
{
// 右左双旋(折线型失衡)
RotateRL(parent);
}
}
else // parent->_bf == -2
{
// 左子树过高:分两种情况
if (cur->_bf == -1)
{
// 右单旋(直线型失衡)
RotateR(parent);
}
else // cur->_bf == 1
{
// 左右双旋(折线型失衡)
RotateLR(parent);
}
}
// 旋转后平衡恢复,停止回溯
break;
}
else
{
// 平衡因子异常(如±3),说明代码逻辑错误
assert(false && "平衡因子超出合法范围");
}
}
return true;
}
private:
// 后续旋转函数放在这里...
};3.2 旋转操作
旋转的核心目标:在保持二叉搜索树规则的前提下,降低失衡子树的高度,恢复平衡 。
旋转分为四种类型:右单旋(RotateR)、左单旋(RotateL)、左右双旋(RotateLR)、右左双旋(RotateRL)
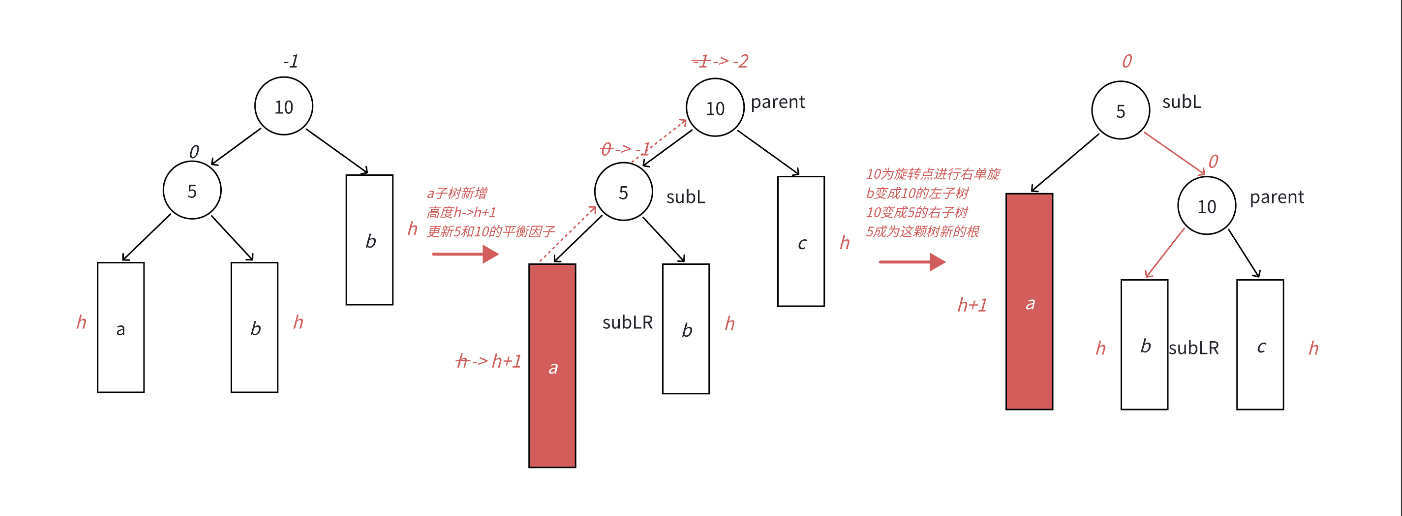
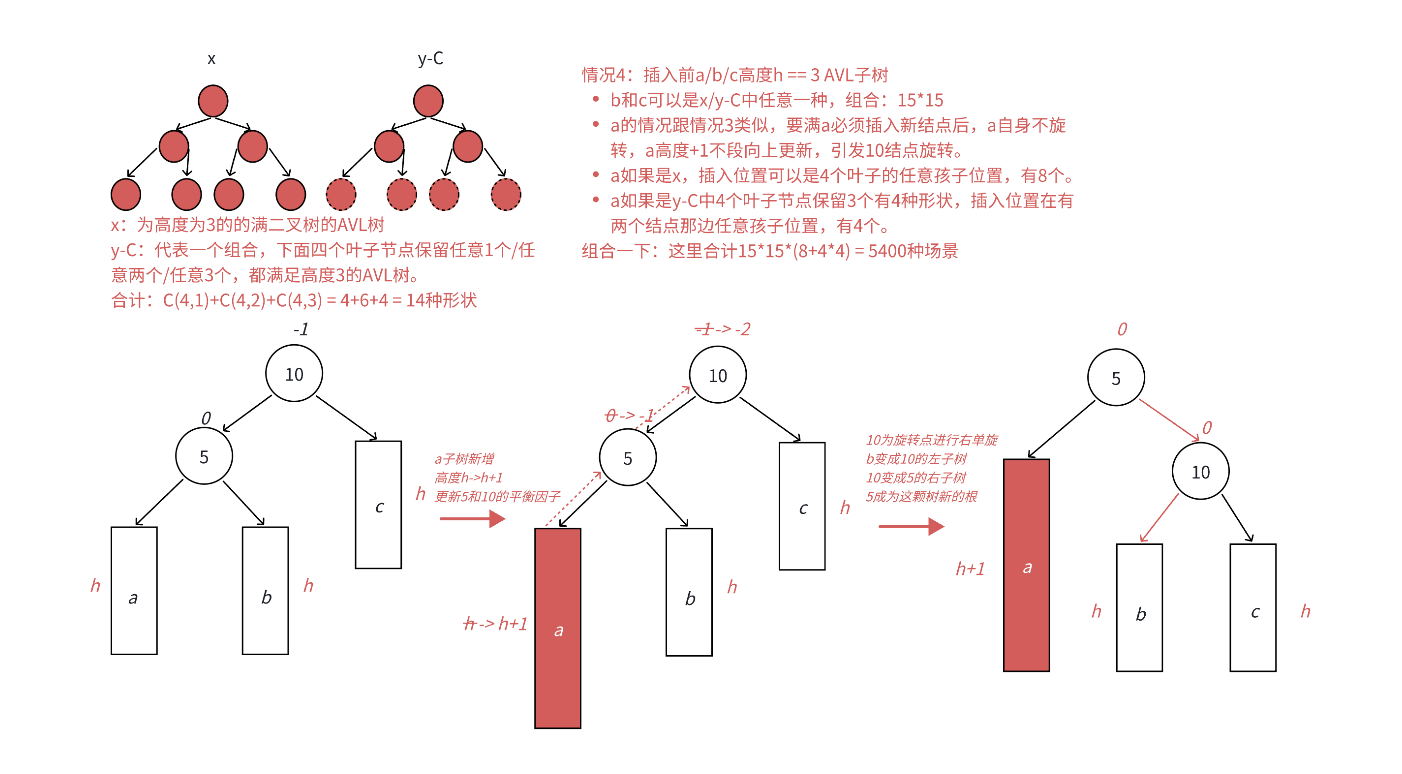
3.2.1 右单旋(RotateR)
适用场景 :失衡节点的平衡因子为 - 2,且左孩子的平衡因子为 - 1(左子树的左子树过高,直线型失衡)
核心逻辑:将失衡节点的左孩子作为新根,失衡节点作为新根的右孩子,原左孩子的右子树挂到失衡节点的左子树。
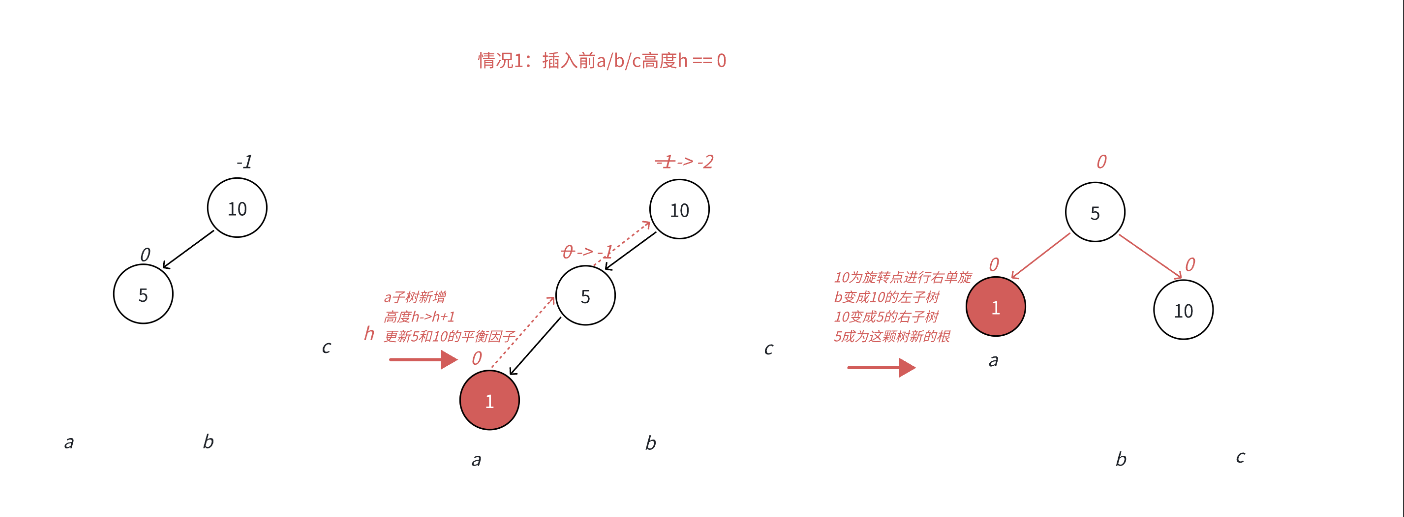
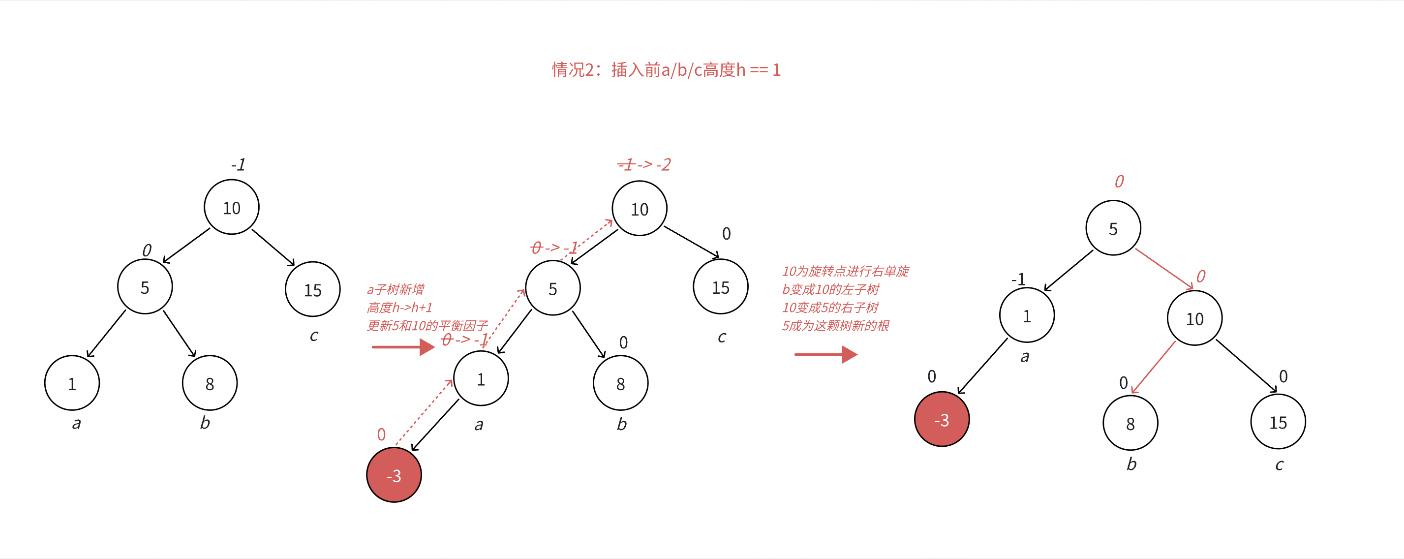
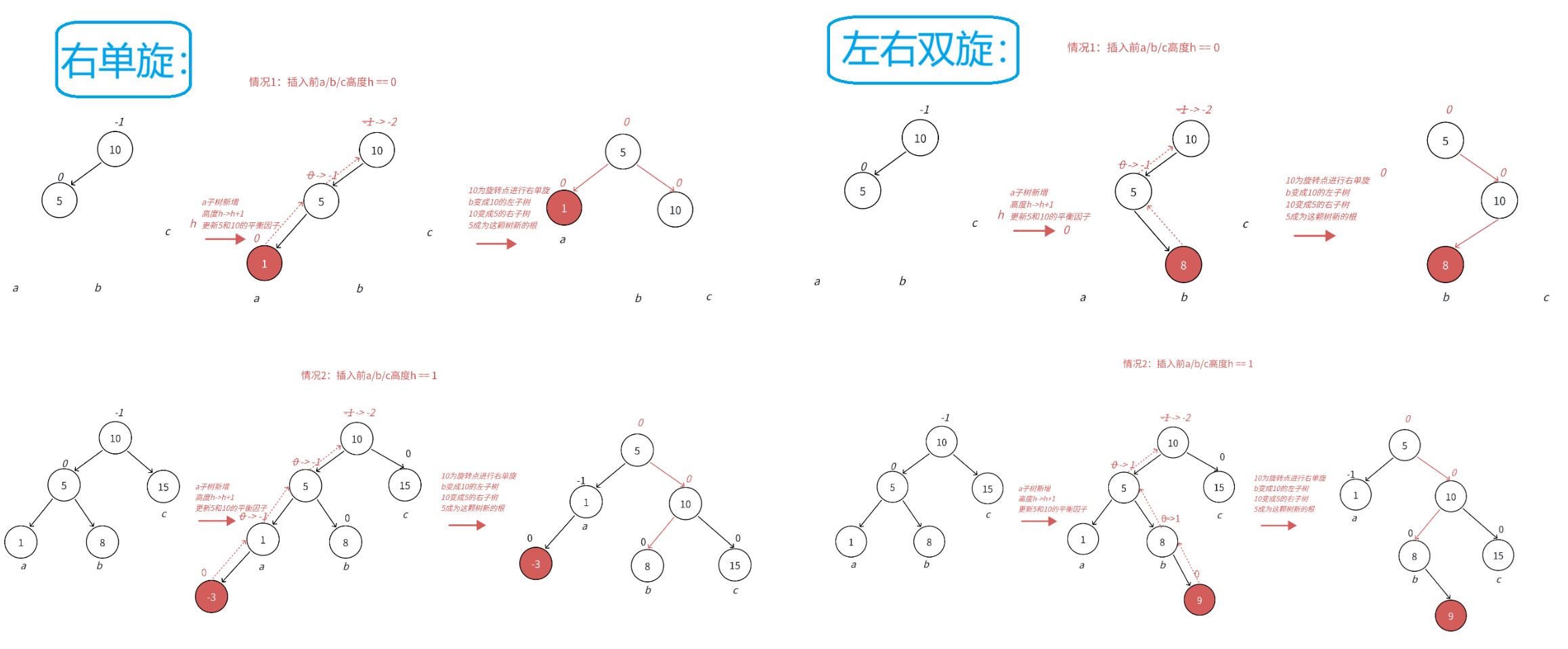
以下5张图解释了右单旋的抽象情况,可以解决大部分右单旋的问题
cpp
void RotateR(Node* parent)
{
Node* subL = parent->_left; // 失衡节点的左孩子(新根)
Node* subLR = subL->_right; // 新根的右子树(需要转移)
Node* pParent = parent->_parent; // 失衡节点的父节点
// 1. 转移subLR:挂到parent的左子树
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
// 2. 父节点降级:parent作为subL的右孩子
subL->_right = parent;
parent->_parent = subL;
// 3. 链接新根到原父节点
if (pParent == nullptr)
{
// 原parent是根节点,更新根
_root = subL;
subL->_parent = nullptr;
}
else
{
if (pParent->_left == parent)
pParent->_left = subL;
else
pParent->_right = subL;
subL->_parent = pParent;
}
// 4. 重置平衡因子(旋转后子树高度恢复,BF归0)
parent->_bf = subL->_bf = 0;
}3.2.2 左单旋(RotateL)
适用场景:失衡节点的平衡因子为 2,且右孩子的平衡因子为 1(右子树的右子树过高,直线型失衡)
cpp
void RotateL(Node* parent)
{
Node* subR = parent->_right; // 失衡节点的右孩子(新根)
Node* subRL = subR->_left; // 新根的左子树(需要转移)
Node* pParent = parent->_parent; // 失衡节点的父节点
// 1. 转移subRL:挂到parent的右子树
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
// 2. 父节点降级:parent作为subR的左孩子
subR->_left = parent;
parent->_parent = subR;
// 3. 链接新根到原父节点
if (pParent == nullptr)
{
_root = subR;
subR->_parent = nullptr;
}
else
{
if (pParent->_left == parent)
pParent->_left = subR;
else
pParent->_right = subR;
subR->_parent = pParent;
}
// 4. 重置平衡因子
parent->_bf = subR->_bf = 0;
}3.2.3 左右双旋(RotateLR)
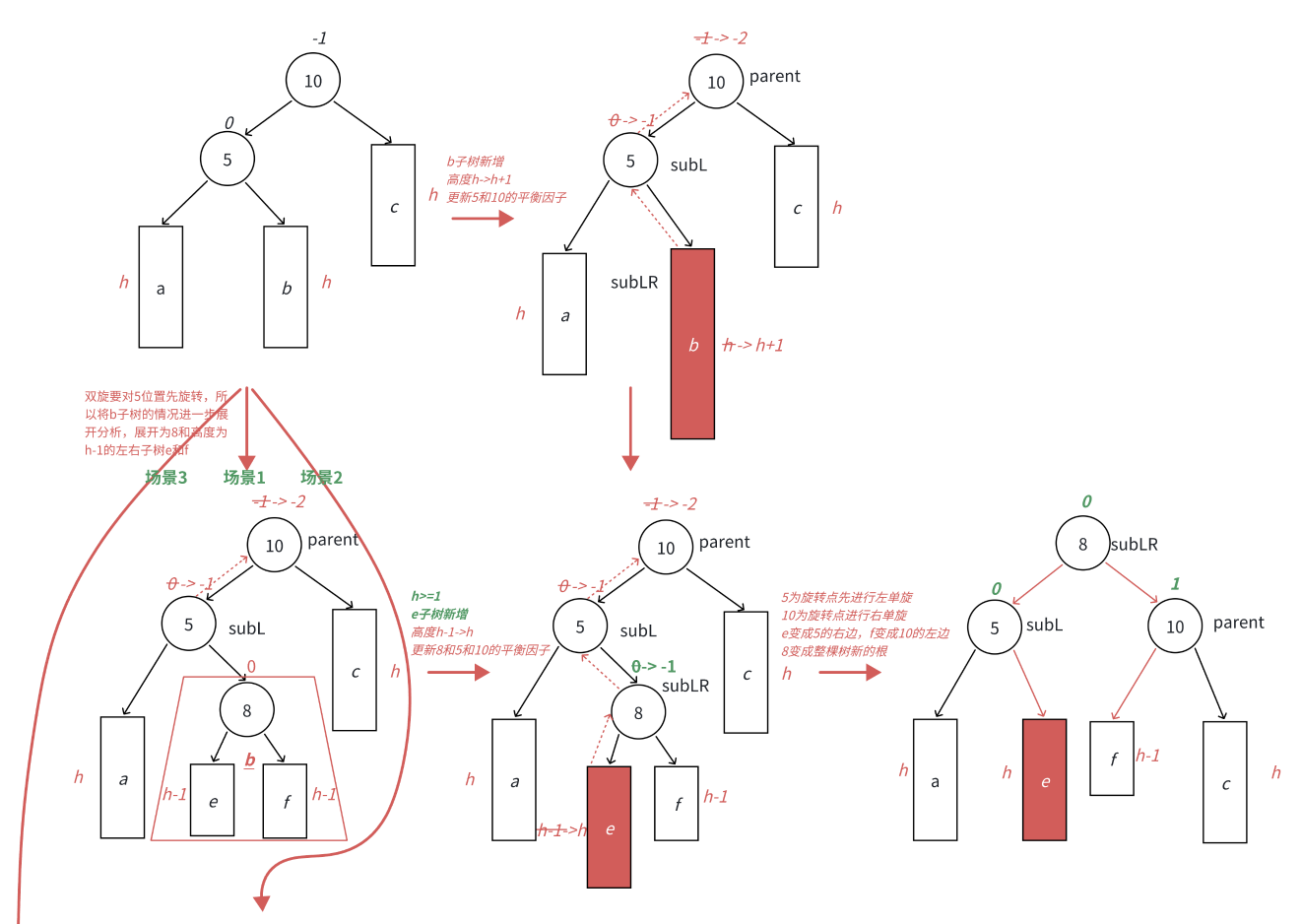
适用场景 :失衡节点的平衡因子为 - 2,且左孩子的平衡因子为 1(左子树的右子树过高,折线型失衡)。
核心逻辑:先对左孩子做左单旋,再对失衡节点做右单旋。
图下右单旋和左右双旋的比较可进行总结:
右单旋 / 左单旋: 节点之间成一条直线(右单旋只解决纯粹的左边搞)
左右双旋 / 右左双旋: 节点之间成一条曲折的线(但在b子树不单纯是左边高,只是对于10是左边高,对于5是右边高,需旋转两次才能解决。对5为旋转点进行一次左单旋,对10为旋转点进行一次右单旋)
对于右单旋: 旋转结束,各节点平衡因子都为0
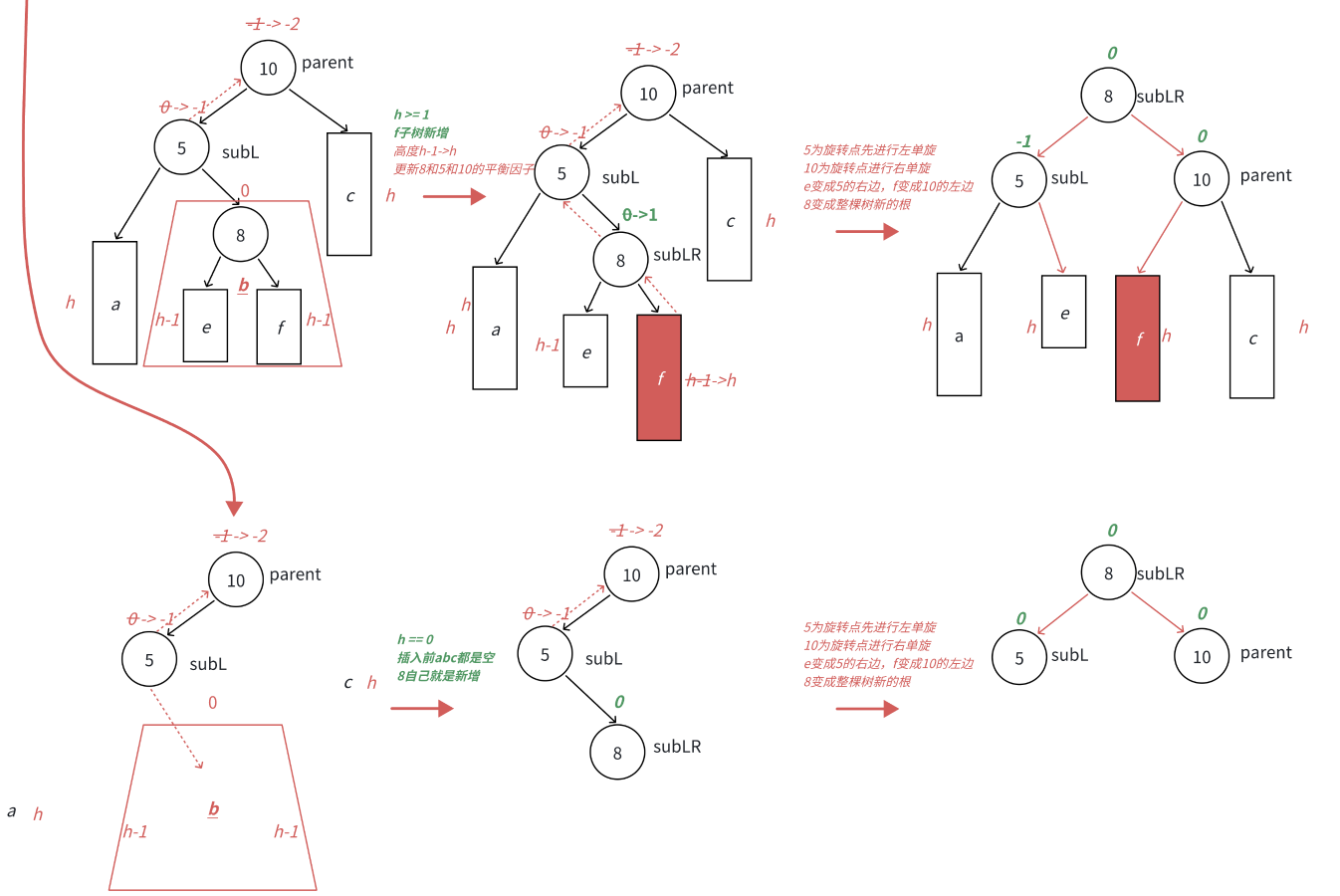
对于左右双旋: 旋转结束,原父节点左右两子节点平衡因子不一定全为0 ,左子节点平衡因子可能为:1、0、-1,右子节点平衡因子可能为:0、1、-1,这时由高度不同会出现3个场景,由下图可知:
场景1 :h>=1时,新增节点插入在e子树,e子树高度从h-1并不断更新8->5->10平衡因子,引发旋转,其中8的平衡因子为-1,旋转后8和5平衡因子为0,10平衡因子为1
场景2 :h>=1时,新增节点插入在f子树,f子树高度从h-1变为h并不断更新8->5->10平衡因子,引发旋转,其中8的平衡因子为-1,旋转后8和5平衡因子为0,10平衡因子为-1
场景3 :h==0时,a/b/c都是空树,b自己就是一个新增节点,不断更新5->10平衡因子,引发旋转,其中8的平衡因子为0,旋转后8和10和5平衡因子均为0
cpp
// 左右双旋
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int bf = subLR->_bf; // 记录旋转中心的BF,用于后续重置
// 第一步:对subL做左单旋
RotateL(subL);
// 第二步:对parent做右单旋
RotateR(parent);
// 根据旋转中心的BF,重置所有节点的平衡因子
if (bf == 0)
{
// 旋转中心是新增节点,所有BF归0
parent->_bf = subL->_bf = subLR->_bf = 0;
}
else if (bf == -1)
{
// 新增节点在subLR的左子树
parent->_bf = 1;
subL->_bf = 0;
subLR->_bf = 0;
}
else if (bf == 1)
{
// 新增节点在subLR的右子树
parent->_bf = 0;
subL->_bf = -1;
subLR->_bf = 0;
}
else
{
assert(false && "旋转中心平衡因子异常");
}
}3.2.4 右左双旋(RotateRL)
适用场景 :失衡节点的平衡因子为 2,且右孩子的平衡因子为 - 1(右子树的左子树过高,折线型失衡)。
核心逻辑:先对右孩子做右单旋,再对失衡节点做左单旋。
cpp
// 右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int bf = subRL->_bf; // 记录旋转中心的BF
// 第一步:对subR做右单旋
RotateR(subR);
// 第二步:对parent做左单旋
RotateL(parent);
// 重置平衡因子
if (bf == 0)
{
parent->_bf = subR->_bf = subRL->_bf = 0;
}
else if (bf == 1)
{
// 新增节点在subRL的右子树
parent->_bf = -1;
subR->_bf = 0;
subRL->_bf = 0;
}
else if (bf == -1)
{
// 新增节点在subRL的左子树
parent->_bf = 0;
subR->_bf = 1;
subRL->_bf = 0;
}
else
{
assert(false && "旋转中心平衡因子异常");
}
}3.3 查找操作
继承二叉搜索树的查找逻辑,时间复杂度稳定在 O(logN)
cpp
// 查找指定键对应的节点(返回值为Node*,方便扩展)
Node* Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (cur->_kv.first < key)
{
cur = cur->_right;
}
else if (cur->_kv.first > key)
{
cur = cur->_left;
}
else
{
// 找到节点,返回指针
return cur;
}
}
// 未找到,返回空
return nullptr;
}3.4 平衡检测(优化 + 修复)
我们实现的AVL是否合格,我们通过检查左右子树高度差的程序进行反向验证,同时检查一下节点的平衡因子更新是否出现了问题
cpp
// 辅助函数:计算子树高度
int _Height(Node* root)
{
if (root == nullptr)
return 0;
// 递归计算左右子树高度,取最大值+1
int leftH = _Height(root->_left);
int rightH = _Height(root->_right);
return max(leftH, rightH) + 1;
}
// 核心检测函数:验证是否为合法AVL树
bool _IsBalanceTree(Node* root)
{
// 空树是合法AVL树
if (root == nullptr)
return true;
// 1. 计算当前节点的实际平衡因子
int leftH = _Height(root->_left);
int rightH = _Height(root->_right);
int actualBF = rightH - leftH;
// 2. 校验平衡因子合法性
if (abs(actualBF) >= 2)
{
cout << "节点[" << root->_kv.first << "]失衡:实际BF=" << actualBF << endl;
return false;
}
if (root->_bf != actualBF)
{
cout << "节点[" << root->_kv.first << "]BF错误:记录=" << root->_bf << ",实际=" << actualBF << endl;
return false;
}
// 3. 递归校验左右子树
return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);
}
// 对外接口:检测整棵树的平衡性
bool IsBalanceTree()
{
return _IsBalanceTree(_root);
}四、AVL 树的总结与拓展
4.1 核心优势
- 极致平衡:任意节点左右子树高度差≤1,查询效率稳定;
- 时间复杂度:增删查改均为 O(logN),无最坏情况;
- 原理清晰:基于二叉搜索树的最小改造,易理解、易实现。
4.2 局限性
- 旋转成本高:插入 / 删除可能触发多次旋转(最多两次双旋),写操作效率低于红黑树;
- 空间开销大:每个节点需存储父指针和平衡因子,空间利用率低;
- 删除逻辑复杂:本文未实现删除(需处理更多失衡场景),实际应用中删除操作成本更高。
4.3 与红黑树的对比
| 特性 | AVL 树 | 红黑树 |
|---|---|---|
| 平衡要求 | 严格平衡(高度差≤1) | 近似平衡(黑高相等) |
| 旋转次数 | 插入最多 2 次,删除多 | 插入最多 2 次,删除少 |
| 空间开销 | 高(存 BF + 父指针) | 中(存颜色 + 父指针) |
| 适用场景 | 读多写少 | 读写均衡 |
4.4 学习建议
- 先吃透二叉搜索树的核心规则,再理解 AVL 树的「平衡」本质;
- 旋转操作一定要画图分析,重点关注「节点链接」和「平衡因子重置」;
- 实现后通过「平衡检测函数」验证,逐步调试旋转逻辑;
- 后续可学习红黑树,对比理解「严格平衡」与「近似平衡」的设计思想。