MPU6050简介
1、MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角(欧拉角),常应用于平衡车、飞行器等需要检测自身姿态的场景
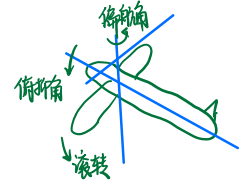
欧拉角: 欧拉角是飞机机身相当于初始3个轴的夹角,飞机机头下倾\上仰,这个轴的夹角俯仰。飞机机身左翻\右翻叫做滚转。飞机机身保持水平,机头向左转或者右转叫作偏航。
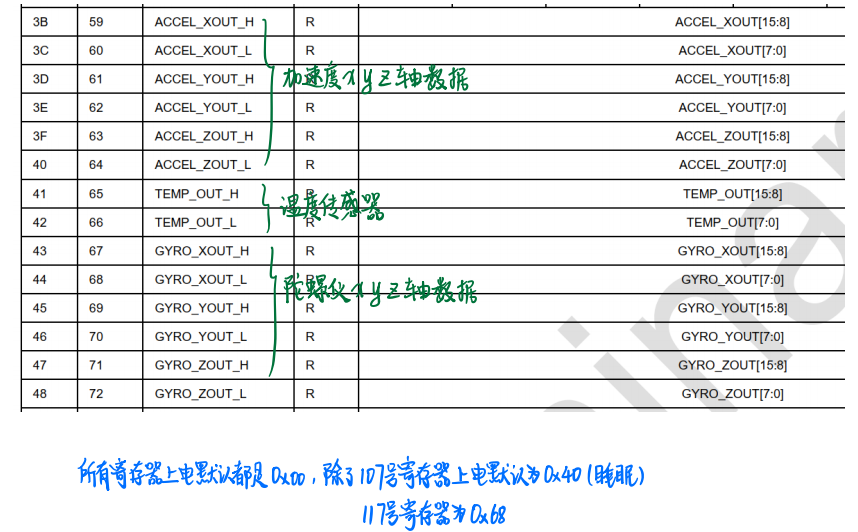
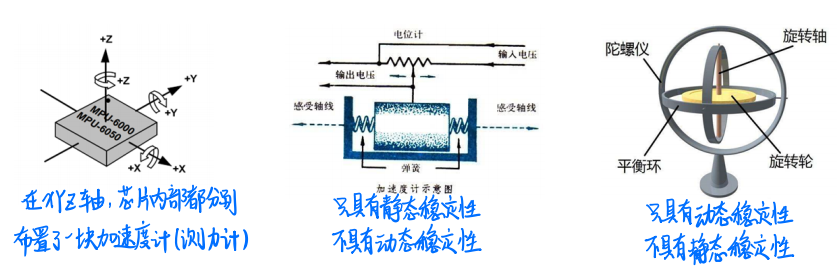
2、3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
3、3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
仅使用加速度计求角度只能在物体静止的时候,当物体运动起来时,这个角度会受到运动加速度的影响而变得不准确。(加速度计只具有静态稳定性而不具有动态稳定性)
角速度的积分=角度。
和加速度计测角度一样,角速度积分得到的角度也有局限性:当物体静止时,角速度值会因为噪声无法完全归零,然后经过积分的不断累积,这个小噪声就会导致计算出来的角度产生缓慢的漂移。(陀螺仪只具有动态稳定性而不具有静态稳定性)
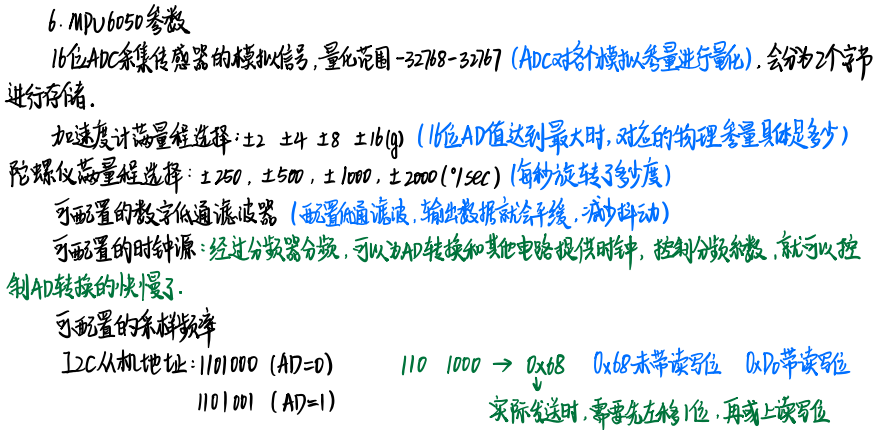
如果物体运动剧烈,可以将量程调大一些,防止加速度和角速度超出了量程。如果物体运动比较平缓,可以选择比较小的量程,这样测量的分辨率就会更大。
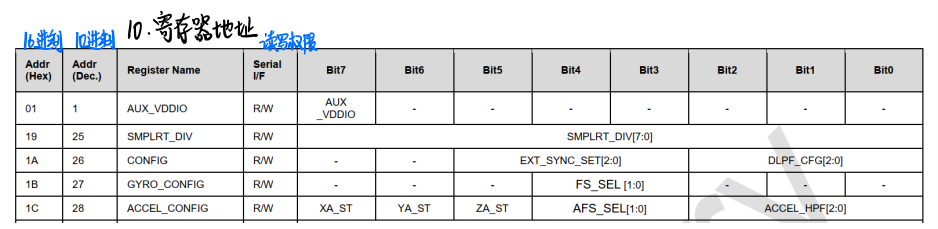
SMPLRT_DIV:采样频率分频器,8位为一个整体,作为分频值。
CONFIG:配置寄存器,有外部同步设置和低通滤波器配置
GYRO_CONFIG:陀螺仪配置寄存器
ACCEL_CONFIG:加速度计配置寄存器