基于CODESYS开发的多轴运动控制程序框架将逻辑和运动控制分开,通过封装单轴控制功能块来操作该功能块,包括归零、点动、相对定位、绝对定位、设置当前位置、伺服模式切换等功能。程序框架由主程序按照状态调用,包括归零模式、手动模式、自动模式和故障模式。程序状态的跳转已经完成,只需要根据具体的工艺要求执行所需的动作。变量的声明和地址规划严格按照C++的标准定义,可以帮助开发者快速完成多轴运动控制程序的开发。
拆解工业控制系统的黑盒子时,总会发现那些真正好用的运动控制框架都藏着个秘密------它们像乐高积木一样把逻辑层和硬件层彻底分离。咱们今天要聊的这个CODESYS多轴框架,直接把单轴控制做成了即插即用的功能块,这招简直就像给机械手装上了自动驾驶模块。
先看这个轴控制功能块的接口定义,这玩意儿活脱脱就是个轴控瑞士军刀:
st
FUNCTION_BLOCK FUN_BLOCK_AxisControl
VAR_INPUT
bEnable : BOOL; // 使能信号
fPosition : REAL; // 位置指令
END_VAR
VAR_OUTPUT
qActualPos : REAL; // 实际位置反馈
iStatus : INT; // 轴状态码
END_VAR
METHOD Home : BOOL // 归零动作
// 这里藏着伺服回零的九种武艺
// 包括限位触发、原点开关捕获等骚操作
END_METHOD
METHOD Jog : VOID // 点动模式
VAR_INPUT
fVelocity : REAL := 10.0; // 默认速度10mm/s
END_VAR
// 速度环和位置环的丝滑切换逻辑
END_METHOD这个功能块里最妙的是把伺服模式切换做成了隐式操作。当调用Jog方法时自动切到速度环,执行定位指令时切到位置环,完全不用手动切换控制模式------这可比某些需要手动切模式的系统智能多了。
基于CODESYS开发的多轴运动控制程序框架将逻辑和运动控制分开,通过封装单轴控制功能块来操作该功能块,包括归零、点动、相对定位、绝对定位、设置当前位置、伺服模式切换等功能。程序框架由主程序按照状态调用,包括归零模式、手动模式、自动模式和故障模式。程序状态的跳转已经完成,只需要根据具体的工艺要求执行所需的动作。变量的声明和地址规划严格按照C++的标准定义,可以帮助开发者快速完成多轴运动控制程序的开发。
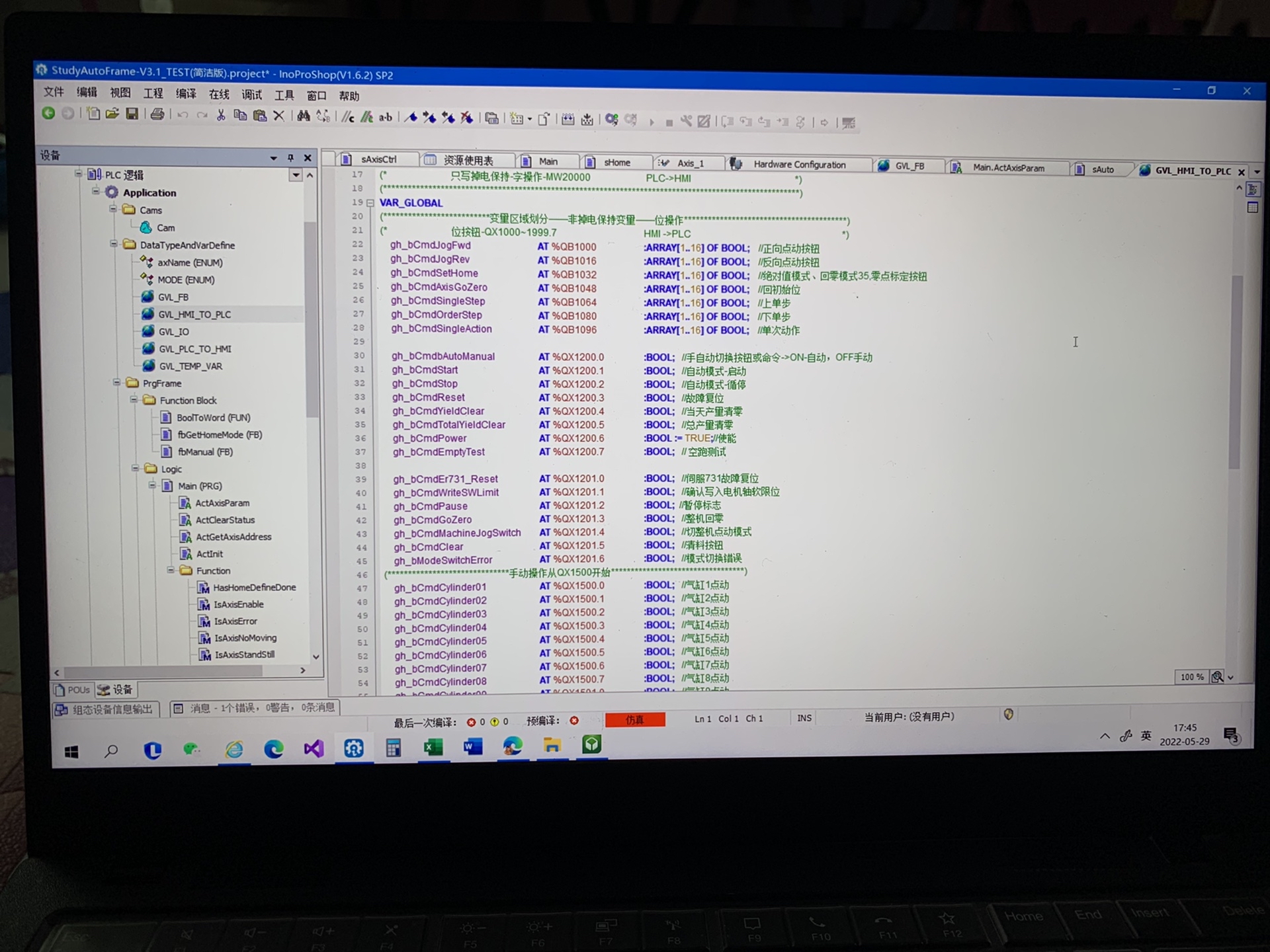
主程序的CASE结构就像交通指挥中心,四个模式状态玩得飞起:
st
CASE g_CurrentMode OF
MODE_HOMING:
FOR i:=0 TO AXIS_COUNT DO
Axis[i].Home();
IF Axis[i].iStatus = 16#8000 THEN
// 归零完成切手动模式
g_CurrentMode := MODE_MANUAL;
END_IF
END_FOR
MODE_AUTO:
// 这里可以塞入工艺配方
// 比如这种魔鬼步伐:
Axis[0].MoveAbsolute(100.0, 50.0); // 50mm/s速度到100mm位置
Axis[1].MoveRelative(30.0);
WAIT UNTIL ALL_AXES_READY;
MODE_FAULT:
// 异常处理比正事还重要
FOR i:=0 TO AXIS_COUNT DO
IF Axis[i].iStatus.ERROR THEN
LogError(i, Axis[i].iStatus);
END_IF
END_FOR
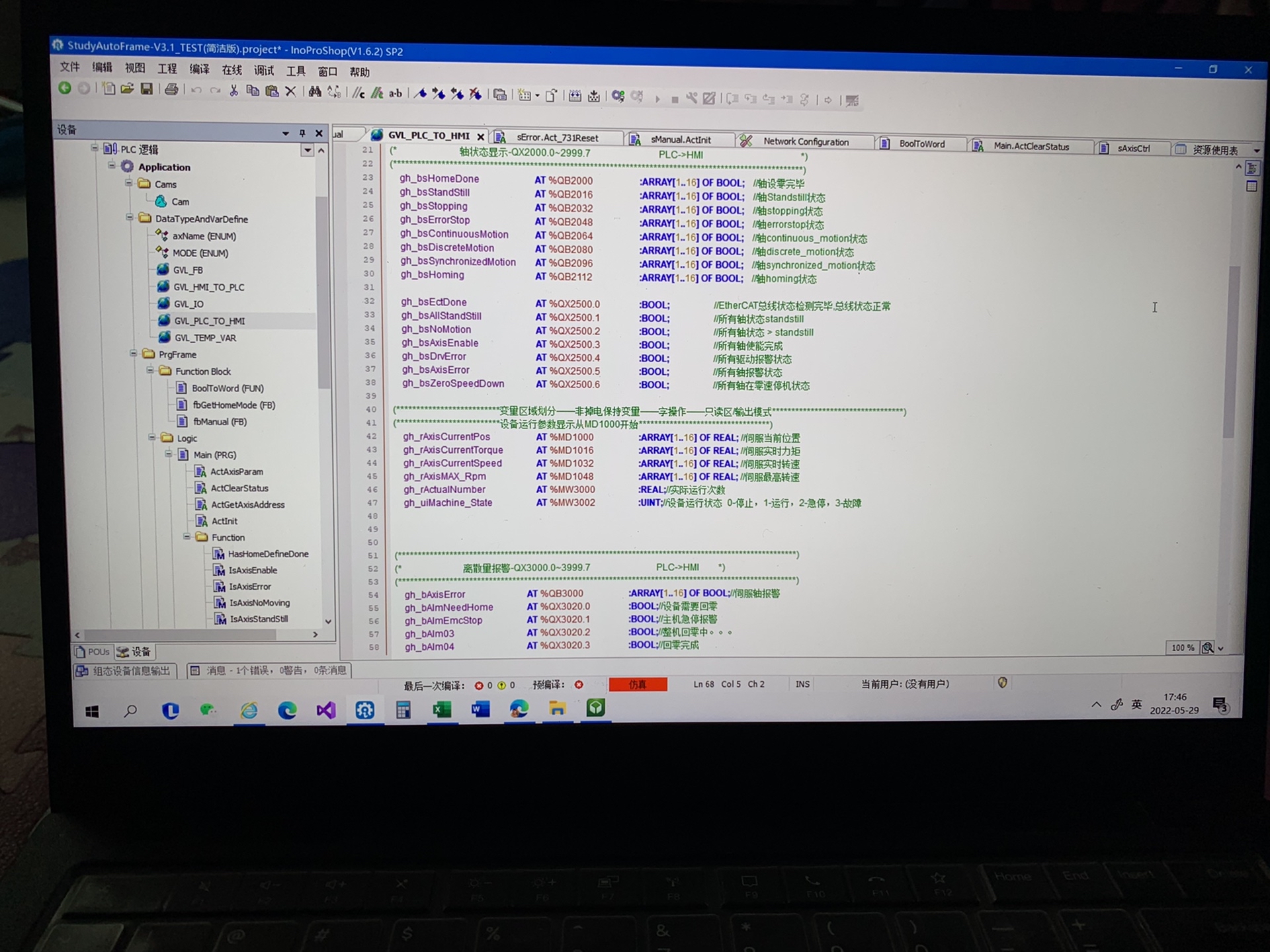
END_CASE变量命名规范是容易被忽视的重头戏。用C++风格的前缀法则,比如输入信号用i开头,输出用q开头,中间变量用m打头。举个栗子:
st
TYPE stAxisStatus : STRUCT
i402State : WORD; // 符合CiA402的状态字
qActualPos : LREAL; // 双精度位置反馈
mTargetPos : LREAL; // 内部计算的目标值
END_STRUCT这套命名法在调试时简直救命------当看到某个i开头的变量异常,直接锁定是外部信号问题;q开头异常则重点检查程序逻辑,这比乱糟糟的变量名省下至少三成调试时间。
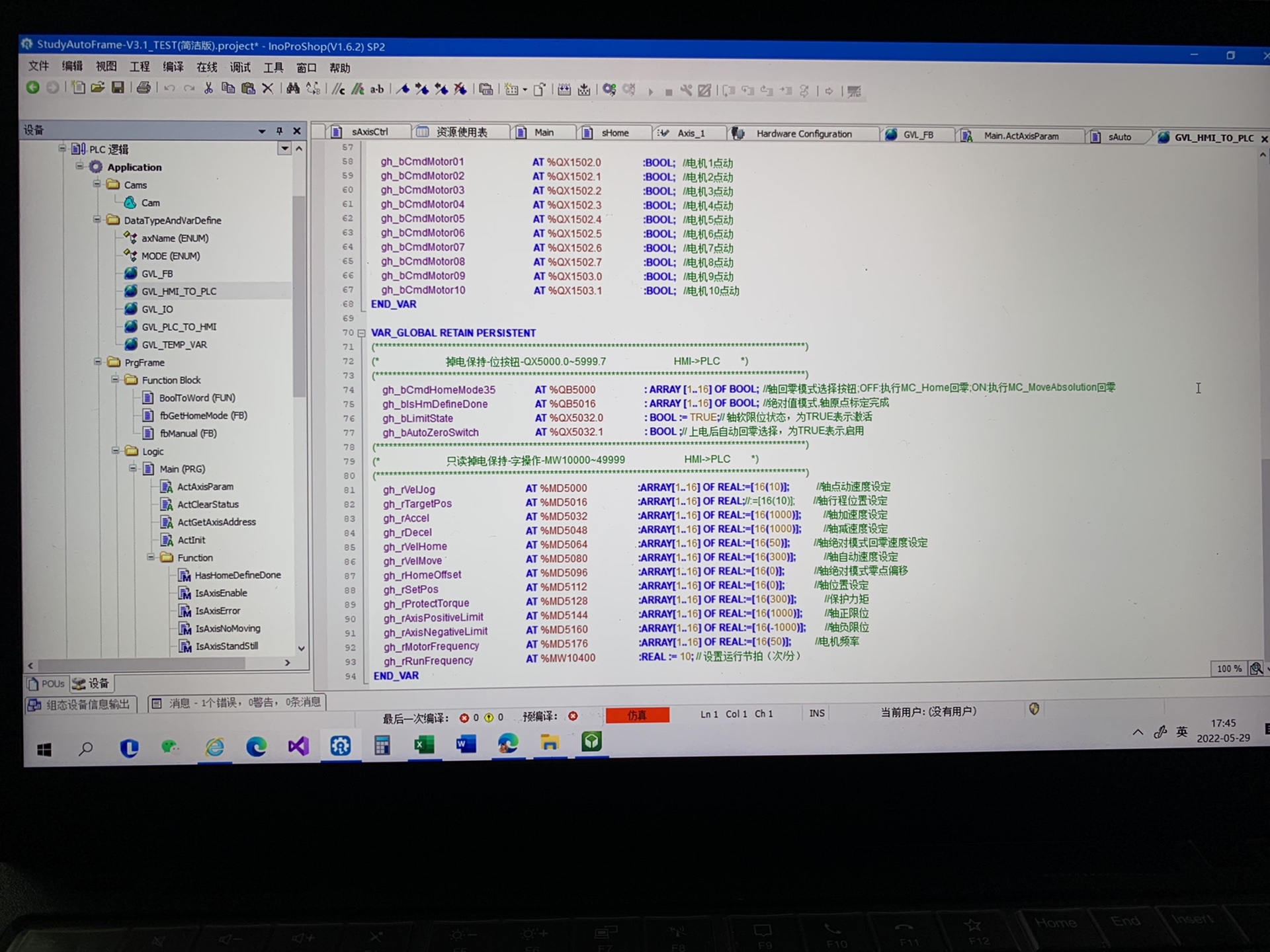
实战中还有几个骚操作:
- 把加减速时间、软限位等参数封装成结构体数组,通过指针传递到各轴实例,修改参数时不用重新编译整个程序
- 利用CODESYS的Trace功能录制运动曲线,配合MATLAB做频谱分析
- 异常恢复时先切到位控模式再执行复位,避免直接上使能导致飞车
最后说个血泪教训:千万别在自动模式里直接调用Home方法!正确的姿势应该是先切到归零模式,等所有轴准备好后再触发归零动作。曾经有个项目因此导致机械臂跳起霹雳舞,那场面简直不要太美...