《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
因果联系是世界万物之间普遍联系的一个方面,也是其中最重要的方面。一个(或一些)现象的产生会影响另一个(或另一些)现象的产生。前者是后者的原因,后者就是前者的结果。科学的一个重要任务就是要把握事物之间的因果联系,以便掌握事物发生和发展的规律。
一.联结主义的因果观
1.休谟的因果观(唐云,2019;休谟,1739)
(1)形成因果的三个条件
休谟的因果观被认为是连接主义学派的。休谟认为,任何因果推理及其信念都建立于心理习惯之上。关于因果关系观念的形成,休谟认为至少要有三个条件:
第一个条件是接近关系。休谟发现,那些被称作是某个事件原因或结果的对象,它们在时间和空间上都是较为接近的,两个对象离开了相应的时空接近便很难再发生因果关系。在空间上,因与果可能是密切接触的(如运动的撞球A击中另一颗撞球B,导致撞球B发生运动),也可能是分离的(如按压墙壁上的开关打开屋顶的灯)。如果两个对象在世界上相距(在时空上)很远,不能给我们的感觉经验提供任何一种接近的感受,那么它们是无法互为因果的。如果(时空)隔着很远的两个对象确实具有某种关系,那也是由一连串因果关系所联系的。休谟认为接近关系是形成因果关系的必要条件,不可缺少。
第二个形成因果关系的条件,休谟认为时间上原因要先于结果。
第三个条件,原因与结果之间应当有一种必然联系。休谟认为,这种必然联系,比以上两个条件更加重要。因为,某些对象之间即便满足时空上的互相接近和时间上的先后次序,仍然不是一种因果关系。于是他便提出,因果关系之间存在着一种必然性条件。
(2)关于理性的必然性讨论
因果关系的前两个条件都是从生活经验中的知觉印象获得的(时空上的接近性和时间上的先后关系都是感觉经验)。但休谟发现,在事实经验中无法找到必然联系(第三条件)所对应的印象,于是他对必然联系提出了两个问题,并从这两个问题开始探讨必然联系的合理性,他后来发现通过对这两个问题的分析也无法证明对象之间必然联系的合理性,而是他便得出结论,因果关系只不过是一种思考习惯,它们无法从我们的理性中获得。
关于必然性的两个问题是:第一,我们有什么理由说,"每一个有开始的存在的东西也都有一个原因"是必然的呢?第二,我们为什么断言,那样一些的特定原因必然要有那样一些特定结果呢?针对第一个问题,休谟认为这是一种没有根据的独断。休谟分析了一条广为流传的哲学原理,这条原理写道:"一切开始存在的东西必然有一个存在的原因。关于这条原理,人们将其当成理所应当,既无证明也不要求证明其准确性。针对第二个问题,休谟也认为是没有理由确定的。我们之所以认为一些特定的原因必然产生一些特定的结果,是因为我们根据过去经验获得的。他认为,那些被我们称作原因和结果的对象都是曾经发生并被我们记忆下来,但是在对未来作出判断时,我们并不能保证过去是这样的就代表未来也是这样的。休谟综合了对因果的种种考察,指出"我们只是假设"我们所经验过的那些对象必然类似于我们所未曾发现的那些对象",但这并不能被证明"。因此,从理性的角度看,我们是无法得出因果关系的,如下例1。
例1
(a)一个农夫养了一只鸡,每天都喂它,这只鸡于是得出一个结论:"每天农夫都来喂它",直到感恩节的前一天它被杀了。
(b)假设有一个巨大的仓库,里面装满了豆子,另外还有2颗是黑豆。每天从仓库中取出一颗。数万年过去,发现取出的都是红豆。于是,按照科学的思想,科学家可以得出结论,仓库里只有红豆。
(c)鸭嘴兽最早被发现于18世纪,当时研究它标本的生物学家认为:鸭嘴兽这个物种根本不可能存在于地球上,这个标本极有可能是人们恶作剧的产物,因为它同时具有卵生动物和哺乳动物的特性。
(3)关于经验的必然性讨论
休谟虽然在理性层面否定了因果律,但并没有在经验层面否定因果律。恒常连接是指,时空邻近的按顺序经常先后发生(前两个条件)的两个事件被认为具有因果关系。休谟将因果关系的本质解释为人观察到了类似事物之间的恒常连接,并逐渐在心中形成了事物之间存在因果关系的某种心理习惯和信念。
首先,休谟指出,当人的感官观察到某些对象之间有某些类似的现象反复地出现,那么这些类似的现象就会让人产生某种习惯,使人的思想自然地根据习惯转移到另一个现象上去,并对此产生期待。
接着,休谟把信念定义为:"和以前一个印象关联着的或联结着的一个生动的观念"。我们在进行因果推理时,心灵首先受到相似现象的恒常连接的影响,这些现象都是生动、活泼的信念。久而久之,我们就在这些恒常的现象上产生了习惯性心理。这种习惯性心理使我们坚信,在一现象出现后必会跟随有另一现象。
因此,休谟认为人类对世界的看法、哲学、科学、一切,都只不过是总结出来的经验。唯物论认为宇宙的规律都是客观的,是宇宙本身的性质,所以人们才会称之为"客观规律"。而休谟认为人对世界的认识和规律总结都是人的意识创造出来的,是知觉,而不是客观存在。
注:
休谟将人类的知觉分为两种:印象和观念。休谟认为,印象是:进入心灵时最强最猛的那些知觉,包含了所有初次出现于灵魂中的我们的一切感觉、情感和情绪。而观念则是:用来指我们的感觉、情感和情绪在思维和推理中的微弱意象。印象与观念有先后次序的区别。往往有一个简单印象之后,就会产生一个与之相对应的简单观念。
2.现代联结主义的因果观
现代联结主义心理学家进一步拓展休谟因果观的内容,他们将因果关系表征为基于联结强度的产生式关系:如果两个现象稳定地重复出现,人们会在前一个现象出现后期望另一个现象的出现。
Michotte(1963)的观点假设人类儿童使用运动、能量、势能和力从一个本体向另一个本体的转换来表征因果关系,认为儿童表征运动本体因果关系的能力是天生的,并且是后续各种因果推理能力发展的基础。Michotte 修正了休莫关于人们无法直接观察因果关系的观点,认为(a)一些运动本体的因果关系是可以直接观察获得的(如撞球A击打撞球B,撞球B开始运动),也只有运动本体的因果关系可以直接观察获得;(b)直接观察获得运动本体的因果关系需要两个基本条件:一是运动本体的因果关系能被直接感知;二是运动本体之间具有休莫提出的时空关系。在建立了运动本体的因果关系后,通过类比推理,可将运动因果发展到其他因果关系中,如"科技的进步推动经济的发展"中的"推动"就是对力因果关系的一种类比,将"科技进步"类比为"推动者",将"经济发展"类比为"被推动物",(16-4:类比)。
3.计算模型
原因与结果之间的协变关系(见表)被认为是评估因果关系最重要的线索之一(Luhmann和Ahn,2011)。原因与效果之间存在四种关系:原因出现且结果出现的次数a、原因出现且结果不出现的次数b、原因不出现且结果出现的次数c、原因不出现且结果不出现的次数d,如图1。在统计学上,常常将统计的频率作为概率,条件概率P(结果出现|原因出现)=a/(a+b);P(结果不出现|原因出现)=b/(a+b);P(结果出现|原因不出现)=c/(c+d);P(结果不出现|原因不出现)=d/(c+d)
原因和结果是否存在因果关系,需要依据4个条件概率来判断。根据4个条件概率的大小关系,一个因果关系可以分为产生式、预防式、无关式三种。如果P(结果出现|原因出现)>P(结果出现|原因不出现),该因果关系为产生式:原因的出现增加了结果出现的概率;如果P(结果出现|原因出现)<P(结果出现|原因不出现),该因果关系为预防式:原因的出现减少了结果出现的概率;如果P(结果出现|原因出现)=P(结果出现|原因不出现),该因果关系为无关式:原因的出现不影响结果出现的概率。
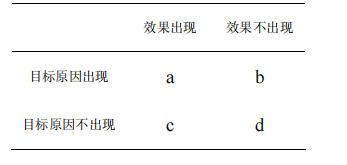
图1
二.干预主义的因果观
联结主义因果观一直影响着因果推理领域的研究,但它的一个重要缺陷是不能区分因果关系和共变关系。即,现象之间存在休莫所谓的恒常联结,造成这种连接的可能是因果关系,也可能是共变关系。一个例子是:如果某人发现自己喝酒之后总是失眠,他可能将喝酒看做是失眠的原因。但也可能是另外一种情况,喝酒和失眠可能是由第三个事件(如参加聚会)导致的,他因为聚会而喝酒,因为聚会太过激动而失眠。在这种情况下失眠的原因是聚会而非喝酒,喝酒和失眠之间只是共变关系。但从联结主义因果观的角度看,喝酒与失眠之间存在恒常联结(喝酒与失眠邻近发生,喝酒在失眠之前),就认为喝酒是失眠的原因,这显然是不合理的。
1.干预
联结主义因果观不能区分因果关系与共变关系,干预主义的因果观可以在一定程度上解决这个问题。干预主义因果观的方法是:在其他条件保持不变时,对X进行干预,如果X的变化导致Y的变化,则认为X与Y之间存在因果关系;如果X的变化并不导致Y的变化则认为X与Y之间不存在因果关系(Pearl,2000;Woodward,2003)。
以某人喝酒、失眠、聚会的关系为例,三者之间的关系可能是图2(a),也可能是图2(b)。图(a)表示聚会导致喝酒(因果关系),喝酒导致失眠(因果关系);图(b)表示聚会导致喝酒(因果关系),聚会导致失眠(因果关系),但喝酒与失眠之间是共变关系。如何确定是关系(a)还是关系(b)呢?根据干预主义因果观,某人继续参加聚会(干预"参加聚会"变量),但不喝酒(观察"不喝酒"的情况),如果他不失眠("失眠"变量发生变化),即喝酒变量影响失眠变量,说明喝酒是失眠的原因,此时关系(a)正确;但如果他仍然失眠("失眠"变量不发生变化),即喝酒变量不影响失眠变量,则说明喝酒并不是失眠的原因,此时关系(b)正确。

图2(a)

图2(b)
2.因果图(Pearl,2019)
(1)定义
干预主义因果观的基础是因果贝叶斯网络。图3中所示的就是一个因果图,箭头的两端分别表示因果,起始端为因,终点端为果。这是一个关于犯人被刑队执行枪决的例子,在例子中"法院命令"与"行刑队长发出命令"分别为原因和结果,而"行刑队长发出的命令"又是结果"士兵A开枪"或结果"士兵B开枪"的原因,"士兵开枪"又是结果"犯人死亡"的原因。
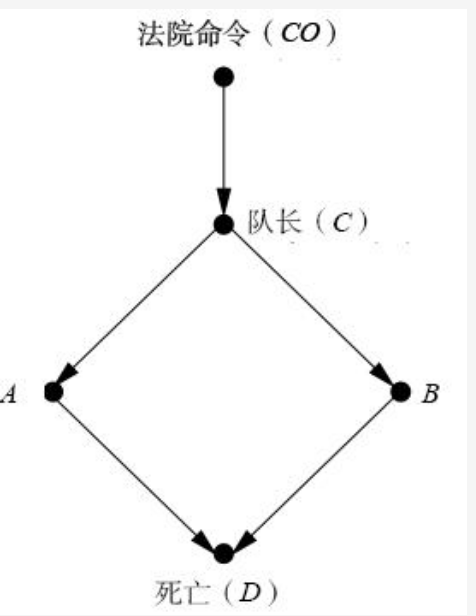
图3
(2)三种基本结构
在因果图网络中,存在三种基本结构。
(a)共同原因结构"X←Z→Y",变量Z是变量X和变量Y的共同原因。例如,医生诊断患有疾病Z的病人会出现症状X,也会出现症状Y,如图4(a)。
(b)链式因果结构"X→Z→Y",其中变量X的发生会引起变量Z的发生,Z的发生又会引起变量Y的发生。例如,天气降温X引起感冒发烧Z,而发烧Z又导致脑膜炎Y的发生,如图4(b)。
(c)共同结果结构"X→Z←Y",变量X或变量Y的发生都会引发变量Z的发生。例如,药物X和药物Y单独服用都会引起皮炎Z,如图4(c)。
任何一个贝叶斯网络都是由这三种基本结构组成,如例中,"行刑队长发出的命令"、"士兵A开枪"、"士兵B开枪"是共同原因结构关系,"犯人死亡"、"士兵A开枪"、"士兵B开枪"是共同结果结构关系。

图4(a) 图4(b) 图4(c)
3.隔断规则
隔断规则指在控制某些变量的情况下,其他变量之间会变得彼此独立(Hausman和Woodward,1999)。通过隔断规则的干预,可以判断两个变量是否存在因果关系。即如果两个变量间不存在隔断规则,那么这两个变量是因果关系。否则它们是共变关系,从而解决了恒常连接不能区分因果和共变的问题。 根据三种基本结构,可以构造出三种隔断规则:
(a)在共同原因结构中,信息从变量Z发出分别到达变量X和变量Y。如果Z的状态固定,那么Z就把X和Y之间的关系隔断了。此时,X和Y的状态是彼此独立的。如"吃东西过多X←焦虑Z→失眠Y",假如我们知道某人因焦虑Z而失眠Y,那么就不会想到他吃很多东西X。在此情况下,吃东西过多X和失眠Y之间是没有直接联系的,二者彼此独立;
(b)在链式因果结构中,信息流从变量X到变量Z再到变量Z。如果Z的状态固定,那么它便隔断了X和Y之间的关系。如"早期有雾X→西红柿质量差Z→利润低Y"中,如果我们知道西红柿质量差Z就可以直接推断利润低Y,此时早上是否有雾X与利润低Y无关;
(b)在共同结果结构中,变量X和变量Z可以分别向变量Z传递信息,但信息流通规则与前两种是完全相反的,如不固定变量Z时,X和Y之间互相独立;当固定Z时,变量X和变量Z关联。如是否服用药物X和是否服用药物Y是独立的,服用这两种药物都可以导致皮炎症状Z,如果告诉你有皮炎Z,而且是由药物X引起的,那么基本可以排除药物Y;
4.计算模型
早在20世纪50年代,部分人认为吸烟基因是吸烟行为和肺癌的共因因子(当然,吸烟基因这种说法可能从烟商中出来的,目的就是为了销售更多的烟)。如果吸烟基因是吸烟和癌症的共因,那么得癌症就不一定是吸烟造成的,而有可能是吸烟基因造成的。因此,排除吸烟基因是吸烟行为和肺癌的共因因子;或证明吸烟和癌症存在因果关系,能更有利的宣传吸烟对身体的危害(Pearl,2019)。
为了证明吸烟和癌症是因果关系而非共变关系。一个方法是,收集了志愿者关于"吸烟"、"癌症"和"吸烟基因"的数据。然后在隔断"吸烟基因"的情况下,观察"吸烟"与"癌症"的因果关系。具体的,在"存在吸烟基因"的情况下(即每个观察对象都存在吸烟基因)(当然,也可以在"不存在吸烟基因"的情况下),然后计算吸烟和癌症的协变关系:计算P(癌症|吸烟)和P(癌症|不吸烟)的大小关系,如果前者大于后者,那么"癌症"和"吸烟"是生产式,它们之间存在因果关系;如果前者小于后者,那么它们是预防式,它们之间存在负的因果关系(吸烟能减少癌症);如果前后两者在大小上没有明显区别,那么可以证明"癌症"和"吸烟"是无关式,即不存在因果关系,而是共变关系。
要注意的是,联结主义的条件概率与连接主义的条件概率是不同的。前者是在因果图的干预下进行统计的(观察对象仅包含存在(或不存在)吸烟基因的),后者则无限制(即在所有的收集到的观察数据(包括存在以及不存在吸烟基因的所有观察对象))。为了区分这两种表示方式,干预情况下的条件概率应该重新表示为P(癌症|do(吸烟))和P(癌症|do(不吸烟)),其中"do()"被称为"do算子"(Pearl,2019)。
5.隔断规则的违背
事实上,人们在进行因果预测时并不总遵循隔断规则。因果图的三种基本结构都发现了人们对隔断规则的违背。
(1)事实证据
Park和Sloman(2013)在研究中,告知被试焦虑可能会引起注意困难,也可能会引起失眠,这是一个共因结构。然后要求被试回答两个问题:(a)有注意困难的焦虑个体是否也有失眠症状?(b)无注意困难的焦虑个体是否会有失眠症状?由于三者是共因结构,按照隔断规则隔断共因"焦虑"时,"注意困难"和"失眠"理应独立。但研究结果发现被试认为(a)发生的比例要大于被试认为(b)发生的比例。说明隔断规则失效。此外,Rehder(2014)在实验中也发现了,在共同原因结构(X←Z→Y)中,当"Z发生"时,被试都会判断 "Y发生"。但当得知"X也发生"时,被试认为"Y发生"的概率会更大。即隔断Z时,X的发生会对Y的发生产生影响。同样,在链式因果结构(X→Z→Y)中,当"Z发生"时,"Y发生且X发生"的概率要大于"Y发生且X不发生"的概率。这些研究结果说明了被试对隔断规则的违背。
Mayrhofer等人(2010)使用虚拟故事场景,四个外星人通过阅读思想和传递思想构建共同原因结构,包括一个发送信息外星人(Gonzs)和三个接受信息外星人(Murks,Brxxx,和Zoohng)。有两种信息传递条件,传播和读取。在传播条件下,Gonzs可以把它的思想传递给其它外星人,三个外星人被动获得思想。显然这是一个共同原因结构。在读取条件下,每个外星人可单独可以读取Gonzs的思想。研究通过给定Gonzs和其他外星人(Brxxx和Zoohng)的思想,要求被试预测Murks的思想。结果发现:如果Brxxx和Zoohng与Gonzs有相同的思想,那么被试认为Murks更可能与 Gonzs 有相同的思想。而且,此结果在传播条件下比在接受条件下更突出。Mayrhofer等人认为,这种现象并不是对隔断规则的违背,他们注意到被试不可能把此模型构建为一个简单的共同原因模型。在传播条件下,被试很自然地假定Gonzs对其他三个外星人进行了思想传播,如果Murks没有共享Gonzs的思想,可能是因为Gonzs的传播机制失效,这种情况下Brxxx和Zoohng也不可能获得Gonzs的思想。在读取条件下,被试更少违背隔断规则,这是因为被试相信,读取的过程很大程度上取决于读者本身。因此,Brxxx是否读取Gonzs的思想并不会影响Murks读取的思想,二者是互相独立的。因此,对隔断规则的违背与人们构想的模型有关。
(2)理论解释
对于违背隔断规则现象的解释,不同学者给出不同的模型,如下。
不充分假说(Hausman和Woodward,1999)认为"违背隔断规则"的发生不是因为人们没有考虑到隔断规则,而是实验者不能充分考虑到各种相关的因果模型,人们拥有更多的因果知识,这些知识可以超越实验者设定的实验条件,从而构建一个更加完善的因果模型。例如,研究者常常假定因果现象中"吸烟、血管障碍、肺部受损的共同原因结构(血管障碍(B)←吸烟(S)→肺部受损(L))是因果充分的"(即忽略了其他因果信息),如图5。而事实上人们还会考虑其他的信息。例如,人们可能假定肺部受损是血管障碍的直接原因(肺部受损→血管障碍),因此隔断规则失效。
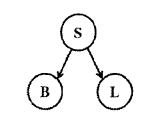
图5
调整机制假说(Dowe,2000),由于实验者所给定的因果模型是不充分的,因此被试可能会设置额外的、潜在的中间调节机制,以建立一个更充分的因果模型。例如,被试假定吸烟是通过另外一个中间因素T影响血管障碍和肺部受损的(被试自主的无意的将T加入到因果图中)。在被试想象的这个结构中,S并没有把B从L中隔断,而是T把B从L中隔断。这种机制能够解释共同原因结构中对隔断规则的违背,如图6(a)(虚线表示被试额外加入的中间因素)。
在共同原因结构中,两个结果的中间因素不同时(如"(B)←(T)←(S)→(P)→(F)"中的T和P),这种情况下S可以把B从L中隔断(从图6(b)到图6(c))。此时人们的推理会遵循隔断规则。
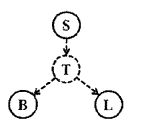
图6(b)
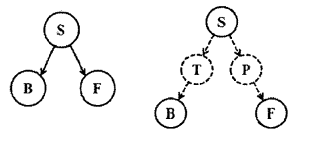
图6(b) 图6(c)
矛盾假说(Walsh和Sloman,2004)认为,当人们遇到矛盾事件时,会调整已有的结构以解释矛盾事件的发生。例如,当你听到Kim抽了3包烟,但是他的肺部还是很健康时,这便违背"吸烟导致肺部受伤害"的事实。此时你可能会想,也许Kim 吸烟时使用了粗滤嘴,此滤嘴能够抑制化学物质的伤害。此时,在个体的因果模型中便产生了一个新的抑制条件。如果这个抑制条件对多个结果都有效,那么因果模型如图7(a)。这种情况下即便隔断S,B和L仍然可以通过D进行关联,因此隔断规则无效;如果不同抑制条件抑制不同结果,那么因果模型如图7(b)。这种情况下,B和L仅通过S关联,隔断S时B和L独立,隔断规则有效。
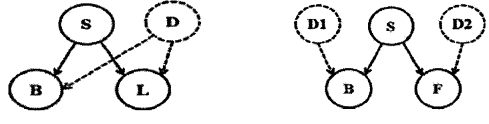
图7(a) 图7(b)
本质主义假说(Rehder和Burmett,2005)认为,在进行因果预测时可能会产生一个潜在因素,这个因素同时对条件和结果同时有效。如图8,隔断S时B和L仍然还能通过U进行传递,需要同时隔断S和U才能判断B和L的因果关系。调整机制假说、矛盾假说和本质主义假说既相似也存在不同,相似之处在于它们都增加了额外的因素,不同之处在于调整机制的额外因素处于原因和结果的路径之间,矛盾假说的额外因素处于路径之外且仅作用于结果,本质主义假说的额外因素处于路径之外且同时作用于原因和结果。
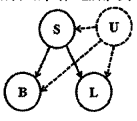
图8
相似性假说认为,因果推理有两种类型,一种是基于直觉、快速和自动的启发式加工过程;另一种是精细的、缓慢的、有策略的分析式加工过程(Evans,2008;Darlow和Sloman,2010)。如果推理者仅仅依赖分析式加工,那么他们完全按照问题进行加工,此时他们不会违背隔断规则。当使用启发式加工时,该理论认为人们把他们获得的因果模型看成是一个原型,当问题中的案例与原型相似时,基于启发式加工的因果推理作用更强。在吸烟例子中,这个原型就是三个事件(吸烟,肺部受损和血管恶化)都出现的情况。那么,告诉被试"某人吸烟并且血管恶化"比只告诉他"某人吸烟"更相似于原型。类似的,"吸烟、肺部受损且血管恶化同时发生"比"吸烟且只肺部受损"更相似于原型,因此前者的概率比后者的大。在这种条件下,人们容易违背隔断规则。
三.因果关系的学习观
1.儿童因果关系的获取
儿童因果关系的获得主要基于,证人证词、观察学习和自主探索三方面。
(1)证人证词
心理学家普遍认为"人类经常使用语言来做出可信的断言,而听者将这种证词视为是证实这些事实真相的可靠证据"(Harris和Koenig,2006)。
(2)观察因果学习
观察因果学习指儿童观察他人(成年或与儿童同年龄段的同伴)进行因果干预所获的因果知识的过程(Meltzoff,Waismeyer和Gopnik,2012)。这种学习在非正式学习中起着特别重要的作用,在正式教育开始前,它也是主要的教学方法(Meltzoff,Kuhl,Movellan和Sejnowski,2009)。观察因果学习包括两个关键要素:观察和因果。观察指儿童通过观看他人干预因果现象获得因果关系,而不是通过听取他人证言或自主探索;因果指儿童通过观察他人干预因果现象可以获得原因导致结果的具体方式和过程,而不仅仅是获得原因与结果之间的共变关系(Waismeyer,Meltzoff和Gopnik,2015)。
(3)自主探索
自主探索指儿童通过自主的行动干预因果现象,并获得因果关系的过程(Gopnik,2012)。皮亚杰提出了被广泛接受的建构主义因果观:人类的因果表征起源于我们对自己因果行为的表征(Piaget,1954)。换句话说,儿童发展起来的最早的因果图式是为满足自己的目标,通过自主地有意的行动并对周围造成影响,从而在自身行动和环境变化的联系中建立因果关系。
2.选择性学习
幼儿是积极的探索者,当新信息与已有信念没有冲突,或者新信息可以轻易归于已有信念时,幼儿就完成了学习。而当新信息与已有信念相冲突时,幼儿就要综合当前情境中的信息来决定是否接受新信息或是否根据新信息的内容来调整已有的信念来适应环境(Vosniadou和Verschaffel,2004),这个过程就是幼儿选择性学习的过程。幼儿的选择性学习涉及到两个过程,选择性信任和信念修正。选择性信任即选择是否信任新信息。Corriveau和Harris(2009)发现幼儿会选择相信曾经提供过准确信息而非提供过不准确信息的信息提供者;信念修正,即更新已有信念的过程。
当儿童遇到反直觉信息时,其选择性学习是如何的呢?违反直觉的信息可以分为两大类:一些信息是貌似可信的,但与我们所认为的规范与标准信息有出入的不寻常事件。例如,蓝色苹果酱的想法或某人在火中行走的事件;另外一些信息则是违背了人们普遍相信的、可以论证的因果规则的不可能事件(Wellman和Gelman,1998)。例如,一种动物转变成另一种动物的事件(这违反了本质主义的直觉),或者一个人穿过一堵坚实的墙的观点(这违反了关于物体坚固性的直觉)。年幼的孩子对这两类违反直觉的信息都持怀疑态度(Lane和Harris,2014)。当儿童被问及不寻常事件(例如,有人从火中走过)是否会发生时,学龄前儿童通常会说不会发生;然而,8岁及以上的儿童通常报告说这些现象会发生。对于违反可靠因果知识的事件(例如,穿过一堵坚实的墙),学龄前儿童和年龄较大的儿童通常报告说此类事件不会发生。
四.主观因果
不同的因果观从各自独特的角度对因果关系进行阐述。由于这些因果观基于不同的视角进行考量,因此每种理论都存在其特定的局限性。例如,连接主义难以区分共现现象与因果关系;干预主义则忽视了人的主观性因素;而学习观主要聚焦于儿童在因果学习方面的探讨。因果关系本身是一个极为复杂的问题,本文在此梳理了前人的诸多观点,并简要提出了自己的见解。首先,总结因果关系的结构,并根据因果关系的力动态特征,对其类型进行划分,以便形成全面的认识;随后,再探讨因果关系的构建模式。
1.因果关系结构
因果关系可以分为自然因果和主观因果。自然因果是指被大多数人认为是正确的自然规律(自然科学)或社会规则(人文社会)。然而,正如哲学家波普尔所言,所有科学都是能被证伪的,因此这里所说的"自然因果"是指目前具有较多共识的,而非绝对意义上的正确。其主要维度包括深度、广度、因果强度和矛盾。自然因果是全社会共有,它们存在于某些人的头脑里,书籍、互联网或规章制度里,但并非每个人都拥有所有自然因果,比如学化学的人不一定懂物理,美国的律师不一定懂中国法律;主观因果则是个人从生活经历和学习中观察获得,存在于个人大脑中,具有主观性。其主要维度包括基础概念、个体差异、跨越式连接、错误、因果的范畴和基于解释。主观因果与自然因果具有部分重叠,只有个人具有这些自然因果。当然还包括部分的深度、部分的广度、因果强度和矛盾。这些维度共同体现了主观因果的主观性。
(1)深度
Nilsson(2014)认为,我们的信念是分不同的深度等级的。在他的书中他举了这么一个例子。我们长期有这样的信念:(a)在地球的温带,冬季比较冷,而夏季比较热。但由于人的求知欲,会促使我们发出这样的问题,为什么冬季比夏季冷?(b)一个解释可能是地球温带在冬季接收的热量比夏季少,解决了第一个问题,随之的问题又来了,为什么冬季接受的热量会比夏季的少。(c)其解释是,地球轴线的倾斜导致其绕太阳轨道运动时阳光照射角度不同。从(a)到(c),相邻的前一个信念和后一个信念互为结果和原因,形成一个因果链。但因果的深度还能继续,比如为什么阳光照射角度会使接收的热量不同?(d)原因在于越接近垂直照射能接收的光子越多,(e)而接收光子越多热量就会越多。那为什么接收的光子越多接收的热量越多呢?...
探索因果信念之间的中介变量(中间变量),是加深因果关系的深度的途径,如上述例子。另外,有研究显示,学经济学会破坏人际信任(Xin和Liu,2013)。学经济学与人际信任下降之间存在因果关系,但它们之间可能存在中间变量,弄清楚这些中间变量,有助于理解这些关系的心理机制,即中介效应。可能存在这样一条因果关系链:经济学的学习导致自私人性观(或者经济人信念)的内化,进而破坏了人际信任。在这条因果关系链中,自私人性观的内化被视为经济学学习与人际信任下降间的中介变量,如图9(刘国芳,程亚华和辛自强,2018)。
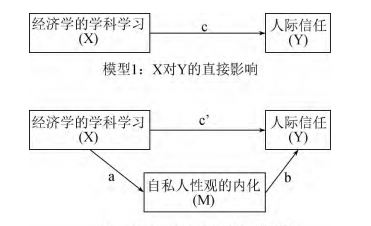
图9
对于一些不是中介因素的因果解释,它们并不会增加因果链的深度。它们属于另一因果链。在"地球温度"这个因果链中,其中一些信息是预设已知的知识。这些知识的因果链是"地球温度"这个因果链的旁支,对它们的因果解释并不会加深"地球温度"这个因果链的深度。比如,为什么地球会绕太阳运动?牛顿给出的答案是万有引力。那为什么会有万有引力呢?爱因斯坦提出引力是由于质量引起的时空弯曲造成的;那为什么质量会引起时空弯曲呢?这需要通过科学的进一步发现才能解答。
(2)广度
因果关系的广度意指,造成某种结果的多种原因的数量。气候变暖是世界各国关心已久的问题,关于气候变暖所猜想的原因有很多,包括(a)人口剧增,导致自身排放的二氧化碳量不断地增加;(b)使用矿物燃料(如煤、石油等),排放出大量的温室气体,造成大气环境污染;(c)森林面积正在大幅度锐减;(d)地球周期性公转轨迹由椭圆形变为圆形,距离太阳更近;...。这些原因的数量正体现了因果关系的广度。
(3)因果强度
每个因果有其因果强度,一些因果强度高,比如,"气温达到-10度以下,水会结冰"。该因果关系比较确定,因而因果强度较高。而"天变暗,导致天下雨",天变暗不一定会导致下雨,因此因果强度较弱。
(4)基础信念
对于自然因果,每当我们发掘出一个更深的因果关系时,总会遇到一个更深层次的问题。例如,万有引力的深层次原因在于相对论的时空弯曲,而时空弯曲理论之后又会有更深入的理论,科学正是这样不断被推动前进的。就个人而言,总存在无法解释的因果和知识盲区,而这些难以解释的现象往往被个人视为理所当然。诸如"物体必须受力才会改变运动状态"、"一个固体无法穿过另一个固体"以及"火能燃烧有机物"等观念,尽管在各自学科中都能找到解释,但对于不了解的人来说,这些就是认知的"最深层面"(除非通过学习拓展了这一深度)。对于个人而言,这些最深层的信念可以称为基础信念。尽管基础信念对个人来说无法被进一步解释,但它们却可以用来解释其他信念。
可以把基础信念类比为公理,把其他信念类比为定理,如图10。在数学中领域中,知识分为公理和定理,公理是无需被证明的,并且是所有定理的基础,比如两点之间直线最短。而定理则从公理推出或其他定理经过演绎推理得出。对于个人而言,基础信念相当于最底层的因果关系,通过它可以推出其他信念。比如,"一个桌球的碰撞可以导致另外一个桌球的运动",要解释这个现象就需要使用基础信念"物体必须受到力才会改变运动状态",其中第一个桌球是力的出发者,第二个球是受力物体,在受到力后运动状态由静止改为运动。
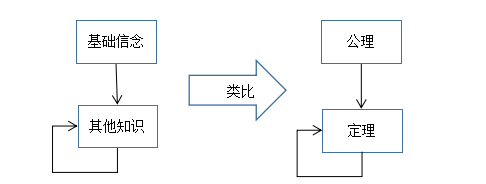
图10
(5)因果的范畴化
所有在大脑的东西都可以被视为一种概念,并且所有概念都能被范畴化。因果关系本身就是一种概念,因此也能被范畴化。比如,儿童在探索世界的过程中发现,墙(固体1)能阻碍玩具车(固体2)的继续前进(运动1),地板(固体3)能阻碍球(固体4)的穿过(运动2),手(固体5)的拍打(运动3)穿不过身体(固体6),...。于是他便变发现了一个固体的阻碍是让另外一个固体继续运动的因;又比如,水可以洗掉灰尘、水可以洗掉颜料,...。于是他便发现了水的清洗是去掉脏东西的因。
因果关系的范畴化至关重要,因为它使我们能够抽象出更高层次的上位因果关系,从而赋予我们更强大的因果推理能力。通过上位因果关系的演绎,我们能够获得解释世界的其他信念,并应对未曾遇到的新情景。例如,当一个儿童发现了"一个固体的阻碍是导致另一个固体无法继续运动的因素"(即上位的因果关系)后,某天他来到一个新地方,发现了这里有一道墙。通过基础信念的演绎推理,他明白自己无法穿越这道墙,若要到达墙的另一侧,就必须寻找门的所在。
(6)个体差别
由于学习、工作生活经历和成长环境的不同,每个人的基础信念是不同的。这里与公理有点不同,因为公理属于自然信念,不管对谁都是一样的。下面从四方面论述个体在信念中的差异。
深度方面:一些不同领域的专家及相关从业人员在其特定领域的基础信念往往比其他人的信念更"深"。例如,许多人可能仅知道光速不变原理是什么(即光速相对于任何参照系其速度都是恒定的),却并不了解其背后的原因,也就是所谓的"知其然不知其所以然"。然而,就此方面(光速不变原理)而言,对于物理学及相关专业的学者、物理学爱好者而言,他们的基础信念显然更深。
广度方面:对于胃疼的病因,胃病医生可以想到的原因可能远比一般人的多,包括急慢性胃炎、胃溃疡、十二指肠溃疡、应急性溃疡、胰腺炎、贲门粘膜撕裂、胃癌等等。
时代方面:从古至今,随着时代的更替,科学的发展与普及,人民的基础信念变得越来越深。古希腊的人们无法解释为什么东边日出,西边日落。他们只能用太阳神赫利俄斯乘着四匹火马所拉的日辇在天空中驰骋来解释。而现代人都知道这是因为地球绕太阳的公转,除此之外还知道这种公转是由引力引起的。
发展方面:这种基础信念,会随着一个人的学习而改变,学习得越多,基础信念越深,并且这种学习会伴随我们一生。
由于自然因果具有较深的深度和较广的广度,所以自然因果的因果图是一个非常巨大的网络。人们在学习生活中会学习大量自然科学和人文社会的知识和技能,因此,人的部分因果信念来自于自然信念(学习到的自然科学和人文社会知识),具有一定的客观性。当然,没人能穷尽世上一切的知识,个体的自然信念也只是所有自然信念的一部分。显然,主观因果是部分的深度和部分的广度。
当然,个体的因果强度也不尽相同。比如有些人认为"天变暗就下雨"的概率为50%,而有些人认为"天变暗就下雨"的概率为40%。
(7)跨越式连接
使用因果图说明因果关系的跨越式连接。以"吸烟"为例,"烟瘾"和"社交场合"都可能导致"吸烟","吸烟"导致"焦油层积","焦油层积"导致"致癌",如图11。
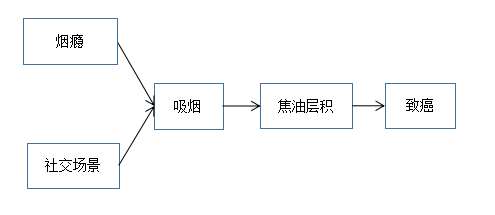
图11
事实上,在这个因果图中,人们常常会建立"跨越式"的因果关系,比如"吸烟"导致"致癌",如图12。生活中很多人都会说"吸烟会导致癌症",但基本很少说"焦油层积"导致"癌症"(或"吸烟"导致"焦油层积")。之所以忽略一些中间的因果关系(焦油层积),有可能是因为很多人对焦油层积的不了解,如图13。当然,也有很多人了解焦油层积,他们之所以建立"跨越式"的因果关系,可能是因为"吸烟"导致"致癌"在生活环境中被广泛传播,并且使用频次更高,从而形成一种习惯。这种习惯体现在因果强度上,也就是"吸烟"到"致癌"的因果强度要比"焦油层积"到"致癌"(或"吸烟"到"焦油层积")的因果强度要高。总的来说,因果关系不一定是"一个-接着-一个"的模式,我们大脑中可能存在大量这种"跨越式"的因果关系,并且我们可能习惯于使用这种关系。
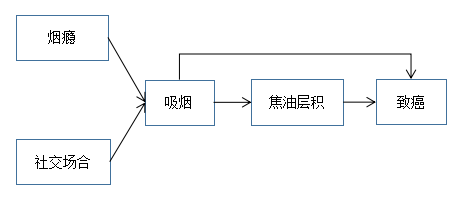
图12
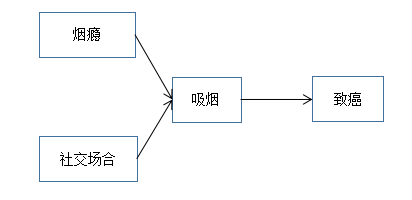
图13
那所有的链式结构都会建立跨越式连接吗?如图14。从现实情况看,基本不可能,我们很少会说(吸烟的)社交场合或烟瘾会导致焦油层积或致癌。那为什么人们会建立"吸烟"到"致癌"的跨越式连接,而"社交场合"或"烟瘾"到"致癌"则不能呢?这可能是因为,它们与致癌的因果关系的强度并不高。首先讨论烟瘾,一方面,烟瘾只是一种意向,而同一行为可能由多种意向驱动,比如"一方面烟瘾导致很想吸烟,而另外一方面想起吸引的危害又强制自己不吸烟",因此烟瘾并不一定会导致吸烟行为的发生。只要其他意向因素战胜烟瘾,就不会有吸烟行为的发生。另一方面,哪怕真的吸烟,也不一定会致癌。综合这两方面看,相比吸烟到致癌,烟瘾与致癌的因果关系已经很低。同理,在社交场合中可以用"我不吸烟"来拒绝吸烟行为,哪偶尔吸烟也不会导致致癌,因此社交场合与致癌的因果关系更低。所以,一般很少将它们与致癌建立跨越式连接。
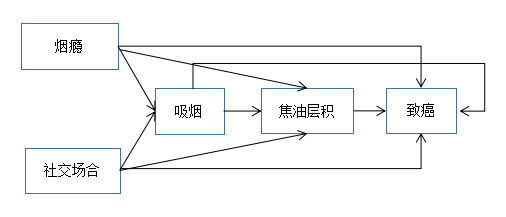
图14
(8)错误
由于个体无法穷尽世间所有知识,仅拥有部分自然信念,因此必然存在其知识盲区。例如,一位语言学博士可能无法解释电子信息学中的小波变换原理。另一方面,我们天生具有对未知事物进行因果解释的倾向,当我们的知识不足以解释某些现象时,错误的解释便有可能产生。在社会生活中,这种情况屡见不鲜。比如,当女朋友未回复消息时,男朋友可能会误以为她不想理他,而实际上她可能只是在忙而未查看手机而已。抖音的一个现象是另外一个例子,这款当下极为火热的娱乐社交软件,同时也是一款赚钱工具(每个人都有机会在抖音上成为达人或进行带货)。为了提升作品的流量(获得更多关注),一些人错误地认为多给同类作品点赞(如舞蹈主播给其他舞蹈作品点赞),多关注同类主播(关注其他舞蹈主播),流量便会自然增加。持这种观点的人不在少数,甚至官方也出面辟谣。
(9)矛盾
有时候,因果关系还可能是矛盾的。同样的结果,也可以有相反的原因。安史之乱时,外敌入侵大唐国都,高仙芝深知兵法,避其锋芒,闭门不迎战是正确的,然而由于高仙芝不是汉人,所以奸臣向玄宗说他闭门不战,肯定与外敌私通了,然后玄宗下令将其处死。假设唐玄宗心理也猜测过,高仙芝闭关不出是出于战术原因而非与敌私通。这两种矛盾因果关系同时存在,但最终"与外敌私通"的想法上风;同样的原因,可以有相反的结果。比如在我小时候身边流行一种说法"带眼镜越多,近视越严重"(已经近视的前提下);而一些眼科门诊的说法则是"带眼镜,能预防或纠正近视"。事实上,后者才是正确的,因为戴眼镜能防止近视眼疲劳。而之所以有"带眼镜越多,近视越严重"的说法,是因为近视者在带眼镜后仍然保持不良的用眼习惯,从而导致近视越发加深。
总之,因果关系可以是矛盾的,甚至这种矛盾存在于同一个人的大脑上。之所以会出现矛盾,是由于知识的不足和思维的局限所致。
(10)临时构建
记忆分为长时记忆和工作记忆,在长时记忆中,每个人都存有大量因果知识(从出生起就开始学习和积累),这些因果知识有着复杂的、错误的、矛盾的、不合理的结构。但在工作记忆中,由于容量的限制每次仅可能从长时记忆中取部分因故知识进行构建,形成一个合理的能自圆其说的因果关系,以对环境进行解释。
例如,对于""冬季"是否"天气冷"的因?"可能存在3种说法,而这3种解释仅仅在于解释的不同。一种是不能,因为冬季是对气候变化规律的一种定义,不能用对事物(天气冷)的定义(冬季)来作为该事物的因,如图15(a)。另外两种是可以的,毕竟"因为在冬天,所以天气很冷"这种说法听起来也可以接受。后两种的不同之处在于,"地球轴线倾斜"是否"季节"的因,如图(b)和图(c)。图的解释是,"地球轴线倾斜"是"季节"的定义,因此它们不存在因果关系。而图的解释是"季节"和"地球轴线倾斜"存在因果关系。
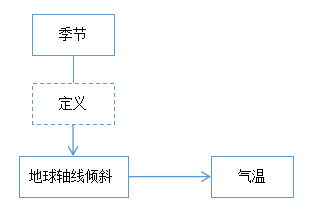
图15(a)
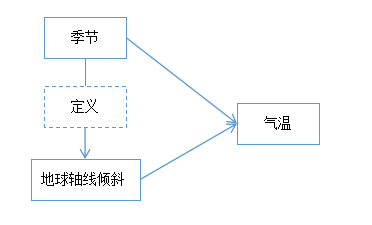
图15(b)
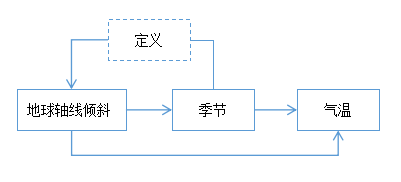
图15(c)
2.因果关系的类型
因果关系的类型,是指原因和结果之间的模式,或者说因果图中的边的类型。实际上,认知语义学中因果关系的力动态模式(19-18:认知语义)就属于因果关系的类型,包含恒定力动态模式(4种)和力动态转换(6种)。如恒定力的第二种模式:主力体的运动趋势为静止,抗力体与主力体产生对抗,但由于主力体的力更大,所以主力体最终的运动模式为静止。例句为"尽管风一直在吹茅屋,它依然挺立在那里"。
值得注意的是,虽然因果关系必须包含两个命题(原因命题和结果命题),但是有些动词的词汇化使其同时包含了运动和因果两种语义,包含这类动词的(一个)句子实质上表达了两个命题(19-18:认知语义)。如例句"火箭溅入水花"就蕴涵了原因"火箭落入水中"与结果"水花溅出"。
3.因果关系的发展
上面分析了两类因果,基础信念和非基础信念,而这两类因果知识的发展是不同的。
(1)基础信念
基础信念的获得大致可以分为被动观察、主动干预和证词
(a)被动观察
被动观察相当于休谟所说的恒常连接,对于时空相近,先后发生的两个事件被认为存在因果关系,这是一种心理倾向。直觉物理就是一种被动观察,是我们观察或与世界交互过程中习得的物理知识,比如物体悬空会下落,受到力的物体会移动,摩擦会阻碍物体运动,时间越长或速度越快的运动物体位移距离越大。这些东西对于非专业人士或爱好者而言,通常是依靠恒常连接获得。
抽象因果关系的归纳也是一种被动观察,当大量类似的因果现象被观察到,能抽象出上位因故概念。在某次尝试中发现吃了药物A治疗了伤病A,发现吃了药物B能治疗病痛B...,从而抽象出"吃了某类东西,会对身体产生影响"的上位因果关系。于是便有了神农尝百草的故事。
(b)证言
证言除了能从别人的证言中获得,还能从书本上的、电子媒体的证言中获得。对于非专业人士,有很多事实是我们日常生活中无法观察或探索的,比如太阳的形成原因(恒星的形成始于巨大的气体和尘埃云,称为分子云。 这些分子云中包含着大量的氢和少量的其他元素。 在重力作用下,分子云逐渐坍缩,形成更为稠密的核心。 当分子云坍缩到足够高的密度时,核心温度升高,引发核融合反应),这些只能从证言中获得。
(c)主动探索
主动探索可以表现为主动的尝试,以进一步强化因果联系。例如,婴儿在偶然摆手时发现,当手接触到铃铛,铃铛便会响起,这时他可能意识到摆手与铃铛响声之间存在因果联系(尽管此时的因果强度较弱,且带有一定的怀疑)。由于这种因果联系尚不牢固,婴儿会反复进行该动作,以进一步巩固这一因果联系。同样,中药的发现也是通过反复尝试,揭示药草与其功效之间的关联。
反事实(16-8:反事实)是一种通过干预进行主动探索的手段,它引导我们进行更深入的探索,发掘更多的事实。在科学实验中,往往需要设置众多参数。例如,在深度学习的神经网络中,虽然已经获得了不错的实验效果,但实验人员为了进一步提升效果,通常会尝试调整网络参数。他们会思考,增加网络层数是否能带来更好的实验效果?将CNN替换为RNN是否会更为优越?将Adam优化器换成SGD是否会更有成效?这些反事实的思考引导实验者或工程人员不断尝试,以发掘更多可能性。
当然反事实引导的因果探索不是没有限制的,反事实中的假设应该是在情况尽可能相同的情况下进行(即考虑与现实世界最相似的可能性世界,这种假设被称为最小化假设)。比如深度学习网络的模型参数包括网络层数、通道数、网络类型(RNN、CNN、FNN等)、优化方法(SGD、Adagrad、Adadelta、Adam等)、损失函数的类型(L1、L2、softmax等等)、激活函数类型...。如果这些参数同时变化,那么很难找出参数变化与结果之间的因果联系,如同时将网络层数从10层改为20层,将通道数从100个改为256个,RNN改为CNN,将SGD改为Adagrad...,那么当实验结果变好时,如何回答是哪个参数变化引起这个实验结果的呢?如果只改变一个参数,如将网络层数从10层改为20层,而其他参数保持不变,那么实验效果变好时就可以确定这是由网络层数变多引起的。
反事实思考可以引出科学发现的逻辑方法(彭漪涟,2017),包括:
求同法,如例2所示,由于在现象a出现的3个场合中,只有A在先行情况是相同的,因此B、C、D、E、F、G就被排除了作为现象a的原因的可能性,于是可以推出结论:A是a的原因。一个例子是,小王一连三个晚上失眠。为了不影响学习,他开始寻找失眠的原因。小王回忆:第一天晚上看了三个小时书,又喝了几杯浓茶,第二天晚上也看了三个小时的书,又抽了许多香烟,第三天晚上同样看了三个小时的书,还喝了大量咖啡。他想,这三天晚上都看了三个小时的书,看来这就是失眠的原因。要注意恒常连接和反事实中求同法的区别,前者是一种被动观察,且获得的因果关系是一种心理倾向,被看作"理所当然",如直觉物理。一般来说,这类型的因果没有反例;而后者则是个体通过主动思考获得的。
例2
先行情况 后续情况
A、B、C、D a、b、c、d
A、B、E、F a、b、e、f
A、C、E、G a、c、e、g
得:A是a的原因
求异法,如例3所示,由于先行情况中的共同情况B、C、D不可能成为后继现象中现象a出现的原因,而只有剩余的情况A才可能成为现象a的原因。这是一种排除归纳法。如最近这段时间,小李一上课就感到头痛,而不上课时则感觉不到头痛。于是他怀疑是上课导致他头疼的。
例3
先行情况 后继情况
正面场合 A、B、C、D a、b、c、d
反面场合 B、C、D b、c、d
得:A是a的原因
求同求异并用法,它同时包含求同法和求异法的特点,其结构如例4所示。
例4
场合
先行情况 后继现象
正面场合 A、B、C、D a、b、c、d
A、E、F、G a、e、f、g
A、F、H、I a、f、h、i
反面场合 B、E、H b、 e、h
C、F、G c、f、g
D、G、M d、g、m
得:A是a的原因
共变法,,其结构如例5所示。如果在某一先行情况发生一定程度的变化而其他先行情况保持不变,后续某一现象也发生一定程度的变化,那么这唯一变化的先行情况就是后续变化现象的原因。例如,通过实验得知,相同质量的气体,在相同的压强下,温度增高则体积膨胀,温度增高越多体积膨胀的幅度越大;反之,温度下降则体积缩小,温度下降越多体积缩小的幅度也越大。
例5
先行情况 后继现象
A1、B、C、D a1、b、c、d
A2、B、C、D a2、b、c、d
A3、B、C、D a3、b、c、d
A是a的原因
剩余法,其结构如例6所示。居里夫妇为了弄清一批沥青铀矿样品中是否含有值得加以提炼的铀,对其中的含铀量进行测定。测定结果表明,一些样品的放射性比纯铀的放射性更强,于是他们认定这些沥青铀矿中含有铀以外的放射性元素。经过艰苦的提炼,1898年7月和12月,他们在这批沥青铀矿样品中先后发现了两种此前未曾发现的元素钋和镭。
例6
复合情况K(A、B、C、D)是复合现象F(a、b、c、d)的原因,
B是b的原因,
C是c的原因,
D是d的原因。
得:A是a的原因。
(2)非基础信念
基础信念是通过归纳(包括排除归纳、类比)的方式获得,而非基础信念则是基础信念可以在演绎推理后获得。一般来说,蛤蟆都是四条腿的,如果见到三条腿的蛤蟆。好奇心可能会促使我们思考。这时我们可能会想,动物缺少肢体的原因可能是受到伤害,也可能是因为基因和发育缺陷(大前提)。因为蛤蟆是一个动物(小前提),一只腿是一个肢体(小前提),所以它缺一只腿的原因可能是受到伤害,也可能是因为基因和发育缺陷(结论)。
4.因果结构的表示形式
上面使用因果图表示因果结构,因果图是以三元组(节点-关系-节点)为基础的概念网络。理想认知模型(19-9:理想认知模型)认为人的知识结构包括命题结构和意象图式两种,以三元组为基础的因果图属于命题结构;而另外一种(即意象图式),也可以表示因果结构。如下图16的复合意象图式表示的因果关系,"一个力作用于一个射体上"导致"这个射体从容器外部进入到容器内部",这个意象图式可以用在如下一个情景"把货物搬进车内"。
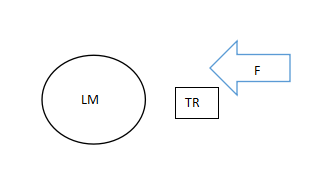
图16(a)
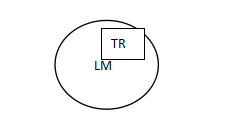
图16(b)
五.因果知觉
1.因果认知(闫鼎,2018)
因果认知分为因果学习和因果推理。因果学习是思维对新的因果信念的多次认知,因果推理是对因果信念的使用。因果学习又可以分为因果推论和因果知觉。因果知觉是对因果关系相对短暂的感知,因果推论指的是从多种情况下推出因果关系的过程。我们需要注意以下几点:
第一,因果学习不同于因果推理。因果推理必须建立在因果学习的基础上。因果学习更强调构建过程;而因果推理更强调对结果的应用。例如,小孩子看到按动开关按钮就可以使电灯发光,电灯发光就可以照亮屋子。因果学习指的就是这个小孩子大脑中改变了对"按到按钮"、"电灯"、"发光"的表征,在之间建立了新的因果联系的过程;而当这个小孩子的大脑中建立了"按动开关可以使电灯发光"这条因果关系之后,就会据此推理,按动台灯的按钮也可以使台灯发光。
第二,在因果学习中,因果推论比因果知觉更复杂。例如,台球杆击打台球,然后台球移动,人看到这种现象后,对这种因果关系的感知和学习发生在一瞬间。完成一个因果知觉要比完成一个因果推理所需要的时间短得多。而因果推论所涉及的情况要更复杂,"吃感冒药可以治愈感冒"这条因果关系,不但需要从""反复"吃药导致感冒持续好转"中推出,也需要从"不吃药,然后感冒继续加重"中推出。
2.因果知觉的定义与分类
因果知觉由Michotte(1963)提出,指的是一个物体引起另一个物体运动的视觉印象,它基于物体之间的物理或机械的相互作用。比如运动的球A碰撞静止的球B,而后导致球B开始运动。因果知觉的主要类型有以下几种:发射效应、触发效应、工具效应、夹带效应、牵引效应和渗透效应等。Michotte(1963)认为发射效应和夹带效应是两种基本的感知因果关系类型,其他感知因果现象的例子都可以被看作是这两种基本类型的特殊情况。
(1)发射效应
发射效应是因果知觉中被最广泛研究的。在典型的发射效应中,发动者物体A从屏幕左边或者右边向静止在屏幕中央的目标物体B移动,相互接触后,发动者A停止运动,而目标B以同样或稍慢的速度(Natsoulas,1961)沿着发动者先前的运动方向开始运动,如图17。
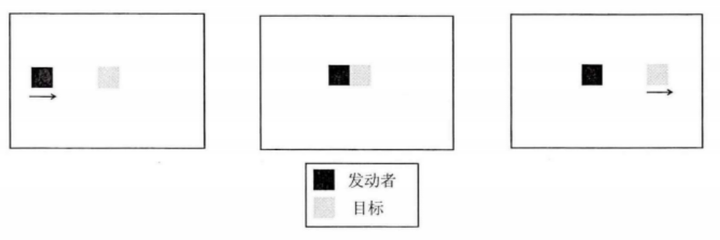
图17
(2)工具效应
工具效应是指发动者与目标之间存在一个媒介,发动者A先朝向这个媒介运动,在触碰瞬间发射器停止运动,媒介继续向前运动再与目标B触碰,触碰瞬间媒介物停止,目标B向前运动,且发射器的运动速度大于媒介物的,媒介物的大于目标B的。Michotte(1991)把这比作一个人使用工具去影响另一个物体,如图18。
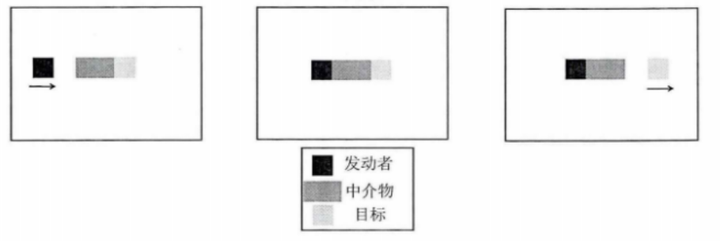
图18
(3)夹带效应
与发射效应相比,在夹带效应中,发动者A在接触目标B后没有停止运动,触碰瞬间发动者A没有停止,而是以同样速度同样方向和目标B一起运动,运动过程中二者始终相接在一起。在这过程中,目标B最初的运动是由发动者A引起,而随后的运动是目标B自我产生的,如图19。如果碰撞后A与B的共同速度慢于发动者A在碰撞前的速度,观察者通常认为是发动者A推动目标B运动;如果发动者A与目标B的共同速度等于发动者A先前的速度,夹带效应更容易发生;当发动者A与目标B的共同速度快于发动者A先前的速度,观察更容易认为是目标B携带发动者A运动(Weir,1978)。
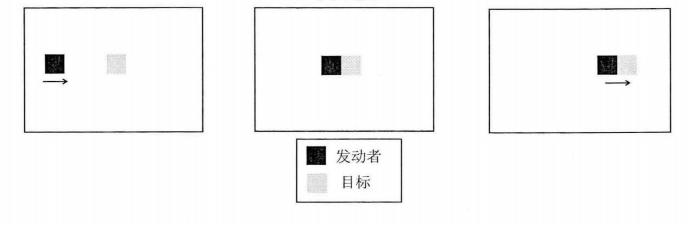
图19
(4)触发效应
Natsoulas(1961)研究一系列速度比的影响,发现目标B速度略慢于或等于发动者A时,被试更倾向于报告发射效应,而当目标的速度快于发动者时,被试则倾向报告触发效应。在触发效应中,目标B运动的启动是由发动者A引起的,但其随后的运动更多是自发产生。发动者A的碰撞类似开关,触发了目标B的运动。尽管如此,发动者A与目标B的碰撞并非是必须的(Thommen,Dumas,Erskine和Reymond,1998),个体只需感知发动者A释放或移除阻止目标B运动的限制,触发效应即可被个体感知到。
(5)反作用效应
在发射效应和触发效应中,目标B通常在发动者A运动停止后开始运动,且目标B和发动者A通常会相互碰撞。Kanizsa和Vicario(1968)展现了触发效应的一种变式,在发动者A撞向目标B之前,目标B就开始运动,如图20,这种现象被称为反作用效应。尽管反作用效应中目标B的运动也归因于自身,但不同于触发效应的是,反作用效应中目标B的运动反映的是二者之间的社会性因果关系,而非物理性或机械因果关系。正如触发效应对目标速度的要求,反作用效应中目标B的速度也需快于发动者。鉴于反作用效应中目标B的运动被知觉为自发的,对其速度的高估可能也符合目标B想要逃离发动者A碰撞的印象。
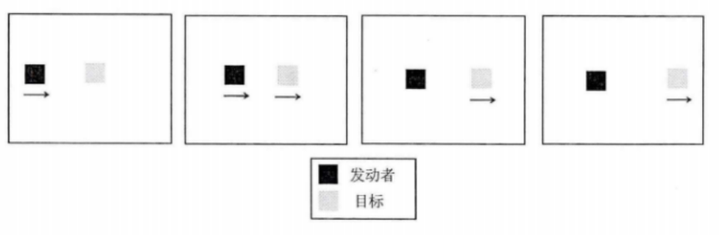
图20
(6)牵引效应
最初Michotte(1963)认为牵引效应是夹带效应的一种变式。在牵引效应中最初运动的发动者A越过目标B后,保持与目标B接触牵引着目标B继续运动。与夹带效应的区别在于物体A与B的相对位置。夹带效应是目标B带着发动者A运动,而牵引效应则是发动者A带着目标B运动。牵引效应的另一种变式是,发动者A向目标B运动,在接触目标B后与B保持接触并向反方向运动回初始位置。此外White和Miline(1997)呈现了新的牵引效应,具体范式如图21所示,向被试呈现一列以小间距隔开的刺激,其中第一个刺激以恒定速度开始运动,随后的刺激在相同时间间隔后以自上而下的方式逐一开始运动,观察者会形成第一个刺激牵拉后续刺激运动的印象。这种牵引效应的发生不需要物体间相互接触,也不需要明显的连接物。
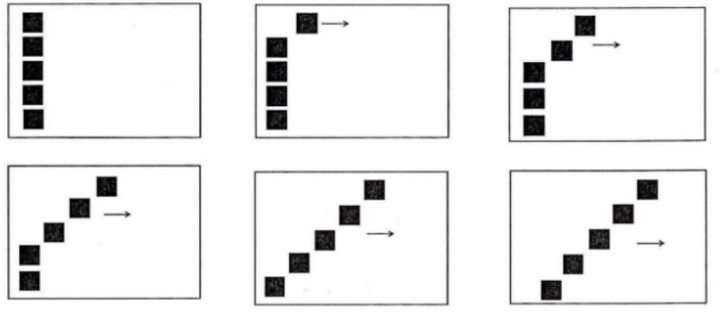
图21
(7)制动效应
在Levelt(1962)的研究中,一个目标在一个平坦的背景A上匀速移动,如果目标进入另一个背景B后目标的速度降低,观察者将感知到制动效应。如果目标在离开背景B时速度恢复到先前的速度,观察者则更有可能产生制动的感觉。如果目标在背景B移动之前或之后出现速度的变化,那么观察者将不会将速度的变化归因于背景B。
(8)渗透效应
渗透效应是指一个运动的物体朝向更大且宽厚的静止物体运动,接触时速度减小且移动物体的最终位置有三种情况:物体前端渗入进静止物体中被遮挡,后端暴露在外;物体全部渗入进静止物体中被遮挡;物体前端穿过静止物体暴露在外,后端渗入进静止物体中被遮挡。Hubbard(2013)
3.低级知觉对因果知觉的影响
低级知觉是指从感觉器官中获取的知觉,比如视觉、听觉等。相比之下,因果知觉是较为抽象的知觉。那么有哪些低级知觉会影响发射效应的强度?其中得到最广泛研究的是时空特性、运动方向、运动速度等。
(1)时间临近性
Michotte(1946;1963)发现当发动者停止运动到目标开始运动之间的时间间隔小于100ms时,被试感知到的因果关系最强烈,当时间间隔大于150ms时,被试完全感知不到因果关系。White(2014)发现时间延迟在0-45ms以内时,发动者与目标之间的因果知觉无显著变化,75ms以上因果评级逐渐降低(评级越高,两者之间越可能存在因果关系)。
(2)空间临近性
Michotte(1963)发现当发动者的最终位置与目标的初始位置之间没有距离间隔时,感知到的因果关系最大;当间隔增大时,感知到的因果关系减小。而当用一个中介物连接发动者和目标之间的空白时,被试感知到的因果关系又会增强(Hubbard,2013)。发动者停止运动的位置与目标开始运动的位置之间存在的距离间隔可能增加了被试对社会因果关系的感知,而不是物理因果关系,如生物(例如,人)之间的交往往往需要一定的距离。
(3)运动方向
White(2012)发现,当发动者与目标碰撞时,目标的运动方向偏离发动者原运动方向的角度越小,个体的因果评级越高。或者说目标的运动方向与发动者的运动方向越相似时,个体的因果知觉越强。
(4)运动速度
在发射效应中,一般要求目标的速度慢于发动者的速度,White(2014)发现发动者速度越大,发射效应越强,反之亦然;而目标速度的越高,发射效应强度越低,反之亦然。比起二者的绝对速度,两者的相对速度比更为重要。Michotte(1963)发现当发动者与目标的速度比为3.6:1时,发射效应最强。当目标速度远远低于发动者时,被试倾向于报告发动者使得目标运动,但存在其他制动因素阻碍目标运动。
(5)物体大小
Natsoulas(1961)改变发动者大小与目标大小的比率,发现大小比率并没有影响因果关系的感知。
(6)其他线索
时空邻近性是形成因果知觉的重要条件之一。不过,也存在一些特殊的运动形式对时空邻近性不敏感。牵引效应的一种形式(自上而下排列的一串方块依次开始向同一方向运动,如图20)对方块间的空间间隔和时间间隔的变化不敏感(White和Milne,1997)。这可能是因为,当其他线索足够强烈时(如绳子的长短、运动方向的一致性、运动的顺序等),才有可能在缺少时空邻近性时形成因果知觉。
4.因果知觉对低级知觉的影响
(1)时间
个体认为存在因果关联的事件在时间发生上更接近,这种现象被称为时间联结效应。Buehner(2012)的实验中包含两种条件,任务是判断"线索"出现到目标闪现之间的时间间隔,其中无因果联系的实验条件是LED灯闪后一段时间目标闪现,另一种实验条件具有因果联系,被试按下某个按钮后一段时间目标闪现。结果发现在具有因果联系的实验条件中,被试会低估按下按钮到目标闪现之间的时间。
(2)空间
Buehner和Humphreys(2010)在发射效应中添加中介物体,中介物体最初与目标左端相接触,在发动者碰撞中介物体后,目标(a)或立刻运动,或(b)间隔600ms后开始运动,或(c)沿着与发动者运动方向相垂直的方向运动,或(d)目标先运动而发动者后运动。被试的主要任务是观看结束后给出与中介物一致的长度,结果发现相对于非因果事件或因果知觉较弱的事件(如(d)),个体在因果事件(如(a))中给出的长度更短,即原因物体与结果物体在空间上被判断得更为接近,研究者将其称之为空间联结效应。
(3)表征动量
Hubbard等人(Hubbard,Blessum和Ruppel,2001)在表征动量(9-11:表征动量)的研究中发现,当被试认为目标客体是被其他客体撞走时,其知觉到的目标客体的表征动量会显著低于目标客体自行运动的情况。根据朴素动量理论,当被试知觉到一个静止的目标客体被另一个客体撞走时,被试会认为目标客体的动量来源于碰撞客体,若碰撞后没有其他的力施加在目标客体上,摩擦力等外界因素会阻碍目标客体的运动,因而被试会预期客体的动量会随着时间而逐渐减小;而当目标客体始终是自发运动时,被试会倾向于认为目标的运动状态保持不变,因此与自发运动相比,在碰撞条件下表征动量更小(McCloskey,1983)。Hubbard和Ruppel(2002)进一步考察了发动者速度对目标表征动量前移的影响,发现随着速度的增快,目标表征动量的前移更大。这是因为发动者速度越大,其传递给目标的动量越大,从而支持了因果知觉对表征动量的影响。
5.内在机制
Michotte和Thinès(1991)认为至少有三条证据可以表明因果知觉是先天的。其一,因果知觉在解释刺激时,具有不可比拟的即时性;其二,观察者与观察者之间对因果知觉的一致同意程度要显著高于对其他学习知识的;其三,自相矛盾案例等非习得知识的存在(由于是非习得的,因此是先天的),如在与观察者所学知识相矛盾的情况下,观察者也可能产生因果知觉。在对婴儿的研究(Leslie和Keeble,1987;Schlottmann和Shanks,1992)中发现,发射效应存在先天的处理机制。但除了发射效应外,不同类型的因果知觉的先天性尚缺证据,但已知的是,White和Milne(1997)认为,牵引效应不太可能属于内在机制。
Michotte(1963)认为,因果知觉和有意识的因果推理存在本质不同,后者要求重复多次的观察,并进行缜密的推理后才能确定因果关系;而Michotte的实验中,被试均是第一次看到实验示例,且在观察结束后立即就报告了他们的因果印象。也有研究发现,因果知觉不会受到信念和意图的影响(Schlottmann,2000),而且在感觉加工的前250毫秒之内就能完成。用现代认知心理学的术语说,因果知觉由视觉系统形成,是一种自下而上、无需意识参与的自动化加工过程,该过程遵循一定的内隐推理规则(White 和Milne,1997)。相反,有意识的因果推理是自上而下、有意识的加工过程。
6.因果与力
(1)机械感受器假说(White,2009)
物体间的相互作用涉及物体间的因果关系,也涉及到力与阻力的概念。而在心理上,此过程同样会牵涉感知力与感知因果关系两种视觉印象。因为,当我们对某个物体采取行动时,我们通过动觉获得与动作中肌肉和骨骼参与的运动觉信息,通过触觉获得手与物体接触点的皮肤压力感觉信息,并且在互动过程中,运动活动与感知反馈之间始终保持着协调。因此,通过这些感受器系统,我们感知自身与所作用物体之间相互作用的视觉因果特征和力学特性。
机械感受器假说认为,作用于物体时所经历的力会形成持久的力学表征。另外,当我们与物体互动时,我们的感知不仅依赖于动觉或触觉,还依赖于视觉信息,即物体间互动的视觉运动学或因果特征(发射效应、工具效应等的视觉特征)。因此,一个典型的自我运动表征会在事件中结合力学和视觉因果特征。当我们形成这种表征时,之后如果看见一个新的非自我运动的视觉因果事件(不是由自身运动造成的,而是其他两个物体的相对运动),视觉上物体间互动的运动学信息会与存储的因果事件的运动学表征匹配。如果找到匹配,那么存储的表征就会被采用作为对视觉输入感知的解释,并且存储表征的其他特征(力学特征)也会成为感知解释的一部分。换句话说,虽然这种条件下力本身无法被视觉直接感知,但如果一个存储表征与输入的运动学特征相匹配,并且存储表征包含了力的特征,那么这个力的特征就会成为对输入视觉感知解释的一部分。相反,如果没有匹配发生,那么因果关系的感知或力的感知就不会发生。
试着想想这样一种情景,如果试着在电脑键盘上按几个键。你有什么感受?很可能,其中一部分感受是向按键施加了力。现在观察别人做同样的动作。你有什么感知?如果你能够观察到按键的移动,那么很可能其中一部分感知会是这样一种印象:对方的手指对按键施加了力。现在观察一个小而重的物体掉到键盘上。你有什么感知?想必,其中一部分感知会是:这个物体对它接触到的按键施加了力。第一个案例与另外两个案例之间有一个显著的区别。在第一个案例中,力的体验主要是通过动觉和触觉来传递的,它通过关节肌肉感受器和皮肤触觉感受器来实现。在另外两个案例中,力的视觉印象是通过将存储表征中力的印象进行某种概括而产生的,这种概括适用于那些类似于我们自己对物体施加作用的物体间的相互作用。有研究认为,发射效应的匹配模式的形成可能来自婴儿用手或脚对静止不动的物体施加的简单推、击或踢。婴儿能够做出这样的动作(布什内尔和布德罗,1993 年),所以他们对这类动作(以及其他动作)的体验可能有助于形成对物体间相互作用中力的理解和感知。
以发射效应为例,在发动者与施力者相匹配(就像我们自己推一个小球),静止的目标与受力物体相匹配(就像被推的小球),因此活动的发动者被感知为对静止的目标施加力,而静止的目标则不被感知为对发动者施加力,而是被感知为对其提供阻力。
(2)力的不对称性
在物理层面上,牛顿第三定律明确指出,目标对发动者施加的力与发射器对目标施加的力的大小相等,且方向相反。但在心理层面上,与牛顿第三运动定律所规定的力的对称性不同,White(2007)发现,发动者被认为对目标施加的力比目标对发动者施加的力要大。在一些研究中,施动者对目标施加一定大小的力,观察者被试通常报告施动者对目标施加了更大的力,而认为目标对发动者施加的力较少或者没有。这种力的心理上的印象被称为力的不对称性。这是为什么呢?根据前向模型,如果发出一个动作时,如果动作的结果符合预期,那么动作发出的感觉就会主导感知,而反馈感觉则会减弱(14-2:个体、任务与环境)。在大多数力感知中,前向模型的动作发出的感觉占据主导地位,这表明如果物体的反应符合预期,触觉感官反馈更有可能被忽略。由此表现出力的不对称性。与此一致的是,观看发射效应的观察者更有可能报告发射器导致目标开始运动,而不是报告目标导致发射器停止运动,这被称为因果不对称性(怀特,2006)。(Hubbard 和Ruppel,2013)
对于两个物体运动模式互相影响的因果感知,本质上是由两个物体之间的相互作用力所导致的。因此,通过观察两物体之间运动模式的相互作用,可以反向感知两个物体之间的相互作用力。在发射效应中,假设物体A为发动者,物体B为目标,两个物之间的相互作用有四个运动学参数:物体A接触前的速度、物体B接触前的速度、物体A接触后的速度以及物体B接触后的速度。这些参数如何影响对物体A的施动力的感知以及对物体B阻力的感知的呢?在力学定律中,这些参数对力的计算具有同等的贡献。但机械感受器假认为这四个运动学参数对力和阻力的感知并非同等重要,White(2009)以发射效应为例对此进行说明:
(a)物体A在接触前处于运动状态,物体B处于静止状态,接触后物体B开始移动,那么物体A会被判断为施加了比物体B阻力更大的力。
(b)当物体A撞击物体B时,如果物体B在接触后没有明显的运动或变化,人们会认为物体B对物体A的阻力更强。而如果物体B在接触后有明显的运动或变化(比如移动),人们就会认为它的阻力相对较弱。
(c)O1B/O2A假说:对于发动者A的施动力的感知,其主要决定因素应该是该物体接触前的速度以及目标B接触后的速度。发动者或目标的速度越快,则对发动者的施动力的判断越大。而发动者接触后的速度和目标接触前的速度影响很小或没有影响。将发动者指定为"O1",另一个物体指定为"O2",将接触前表示为"before"(B),接触后表示为"after"(A)。因此,研究者将这个假设表示为"O1B/O2A 假说"。
(d)发动者A对目标B所感知到的阻力,主要应由接触后目标B的速度决定,接触前物体A前速度也可能产生影响。
下面将用实验证明部分结论。这里只说明实验证明的主要方法,而非对上述所有结论的证明。实验会对被试呈现两个小球,如图22(a)所示。一个球为发动者A(黑色),另外一个为目标B(白色)。碰撞前,A有三种不同的速度条件,分别为8.1ms/s、13.5ms/s和18.9ms/s,碰撞前B为静止。碰撞后,A有三种不同的速度条件,5.4ms/s、0ms/s以及-5.4ms/s,而B也有三种不同的速度条件,8.1ms/s、13.5ms/s和 18.9ms/s。当运动方向从左向右时,速度取正值;当运动方向从右向左时,速度取负值。不同的速度条件组合共设定了27种实验条件。被试需要做的是判断:"当物体A与物体B接触时,物体A对物体B施加了多大的力?"以及"当物体A与物体B接触时,物体B对物体A施加了多大的阻力?"。力的大小用0到100之间的数字表示,0表示没有用力,100表示最大的力。(White,2009)
实验结果如图所示,上面所有数值为所有试次的平均判断值。对A施动力的判断值显著受到A接触前的速度和B接触后的速度的影响,A的施动力有随着这两种速度的增加而增大的趋势。但不受A接触后的速度影响。这支持了结论(c);对物体B阻力的判断受到所有三个变量的影响(B接触前的速度为0,所以不算在内)。随着接触后B的速度增加,所判断的阻力有减少的趋势。这支持了结论(d)。判断出的阻力也随着接触前物体A的速度增加而增大。在物体B接触后移动缓慢以及物体A接触后改变方向时,判断出的阻力最高。
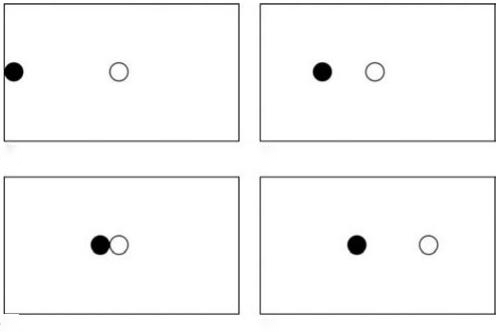
图22(a)
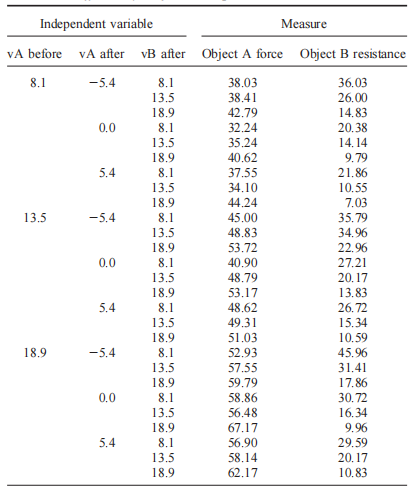
图22(b)
另外,在diSessa (1982)的一项研究中,被试与一个依照牛顿定律运动的计算机生成物体进行互动。在没有外力作用的情况下,该物体以恒定速度沿直线运动。被试试图通过模拟推力来控制物体的运动。接着需要被试判断被推后物体的运动方向。研究人员发现,无论是成人还是儿童,被试几乎总是预期物体将沿其被推的方向移动,而不是推力的方向和物体先前运动的方向的整合。这表明,被试忽视了物体先前运动对接触后物体运动方向所起的作用。
(4)目标作用力和阻力的区分
White(2009)认为目标对发动者的力可以分为作用力或阻力两种。作用力是具有自身动力的、拥有内部能量源、能够驱动自身行为的实体所发出的。例如,一个具有自身动力的实体(比如一个人),可以对发动者进行反推,从而导致施力者肢体的位移(两个物体都被感知为相互施加力);而阻力则不会主动对发动者施加力,表现为发动者在施力时所感受到的阻力。作用力或阻力之间存在着本质的区别。这种差异体验在两方面,(a)对于发动者自身的感知而言,自主运动实体的动作本质上是不可预测的,因此在发动者的动觉、触觉和视觉上,前馈模型中所编码的信息与反馈信息之间往往会存在差异,比如发动者用手往前推,结果却被目标反推向后。(b)对于外部观察者而言,自主运动实体的动作通过匹配过程被识别为动作,涉及主动施加力。即当自主运动的目标对发动者产生反作用力时,发动者身体受影响部位的位移会被体验为自主运动目标作用于发动者身体的外力所产生的效果,产生的匹配导致了关于目标的力的印象;而如果目标只有阻力,则不会被如此识别。
六.溯因推理
溯因推理是一种由结果推断原因的归纳推理,是人们在日常思维中经常使用的一种推理,如例7(彭漪涟,2017)。
例7
一盏日光灯突然熄灭了,为了使其复明,总要先推测日光灯熄灭的原因:是停电?还是电源线路接触不好?还是日光灯管坏了或者是其他零件损坏了?...?可以把这些推测所使用的推理整理如下:
(a)如果停了电,那么日光灯熄灭;日光灯熄灭,所以停了电。
(b)如果电源线路接触不好,那么日光灯熄灭;日光灯熄灭,所以电源线路接触不好。
(c)如果日光灯管坏了或者是其他零件损坏了,那么日光灯熄灭;日光灯熄灭,所以日光灯管坏了或者是其他零件损坏了。
(a)和(b)的形式是(p→q)⋀q→p,(c)的形式是((pⅤr)→q)⋀q→pⅤr。这些形式看似演绎推理,而实际上属于归纳推理,因为溯因推理很难穷尽所有的原因。如例中,假设(a)、(b)和(c)分别是三个人给出的原因,这三组原因都是导致日光灯熄灭的原因集合的一个子集。
正如例(c)所示,溯因推理所得出的原因不止一种可能(日光灯管坏了或者是其他零件损坏了),为了找出唯一可能的原因,可以使用问题解决的方法。初始状态是多个可能的原因,问题解决的方法可以使用排除法,目标状态是将其余可能原因排除,剩下唯一的一个。
如果在具体的层次无法推理,那么可能会在抽象水平作出推理。人的知识是有限的,不可能每个具体现象都使用具体的原因去解释。比如我们知道"如果热,那么能引起出汗",当把热的情况排除后,我们怎么解释出汗原因呢?我们知道出汗是一种身体状况(出汗是具体,身体状况是抽象),而我们知道"当身体生病的时候,可能会引起某些身体状况",那么我们会推理出,可能是生病导致了出汗(抽象水平的推理)。