在本专栏的前六篇内容中,我们已经逐步拆解了深度学习的核心数学基础:从梯度下降的核心逻辑(如何沿着梯度方向寻找损失最小值),到反向传播的链式法则(如何高效计算各层参数的梯度),再到激活函数的非线性本质与梯度特性(如何让深层网络具备拟合复杂数据的能力)。
而今天,我们将聚焦深度学习训练的"最后一公里"------优化器。在前文的例子中,我们一直沿用最基础的随机梯度下降(SGD)来更新参数,但在实际开发中,SGD的收敛慢、易震荡、对学习率敏感等问题,往往会影响模型训练效率。在本文中,我们将介绍实际开发中最常用的4类优化器,从数学原理层面拆解它们相较于SGD的核心优势,最后通过可直接复用的代码,详解各优化器的参数配置、输入输出及使用逻辑。
一、实际开发中常用的优化器:核心定位与适用场景
在深度学习工程实践中,优化器的选择直接决定模型的训练速度和最终性能。结合前文学到的梯度下降、反向传播知识,我们先梳理4类主流优化器的核心特点------它们覆盖了90%以上的深度学习场景,从简单线性模型到复杂Transformer大模型均有适配。
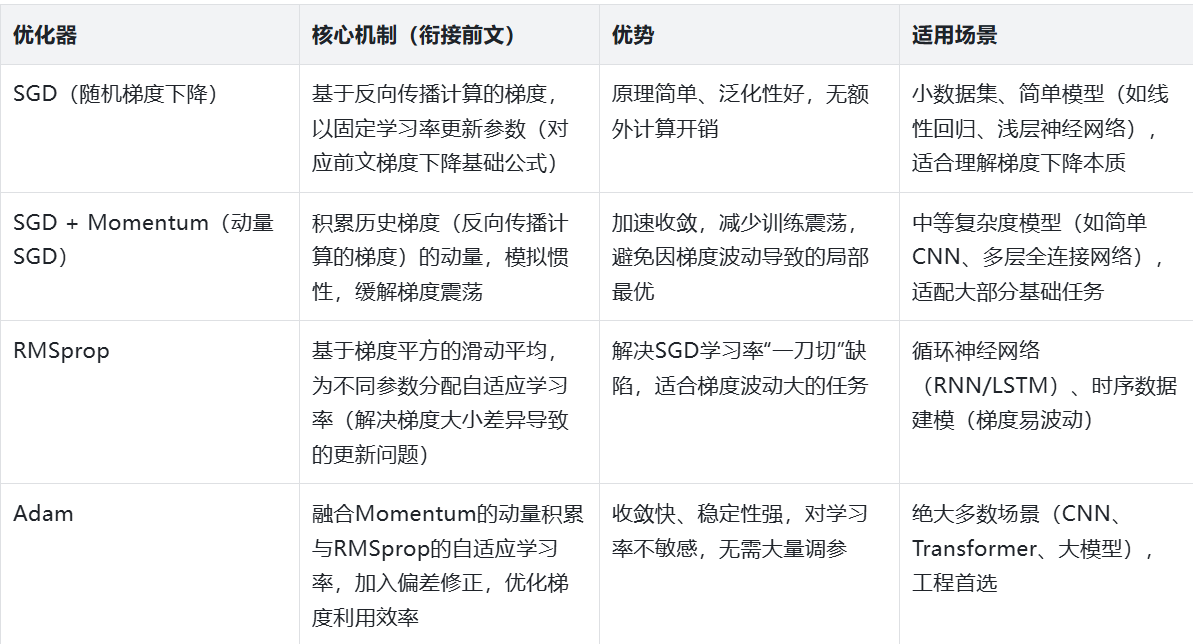
注:这4类优化器均基于"梯度下降"的核心逻辑(沿着梯度反方向更新参数),区别仅在于"如何利用梯度"------这也是我们接下来数学原理拆解的核心。
二、数学原理:进阶优化器为何优于SGD?
在前文"梯度下降"章节中,我们已经掌握了SGD的基础公式;结合"反向传播"章节,我们知道了如何计算各层参数的梯度(∇L(θt)\nabla L(\theta_t)∇L(θt))。本节课,我们将从SGD的数学公式出发,逐步推导进阶优化器的改进逻辑,重点说明"如何通过数学改进,解决SGD的缺陷"。
2.1 基础回顾:SGD的数学公式与核心缺陷
SGD的参数更新公式极其简单:
θt+1=θt−η⋅∇L(θt)\theta_{t+1} = \theta_t - \eta \cdot \nabla L(\theta_t)θt+1=θt−η⋅∇L(θt)
其中各符号含义:
-
θt\theta_tθt:第t步的模型参数(如权重w、偏置b,对应反向传播中需要更新的参数);
-
η\etaη:学习率(固定值,如0.01,控制参数更新幅度,前文已讲过其对训练的影响);
-
∇L(θt)\nabla L(\theta_t)∇L(θt):第t步损失函数对参数的梯度(通过反向传播的链式法则计算得出)。
结合前文学到的梯度、反向传播知识,我们很容易发现SGD的3个核心缺陷(也是进阶优化器需要解决的问题):
-
学习率固定:所有参数(无论梯度大小、更新需求)共用一个学习率,比如"梯度大的参数需要小学习率避免震荡,梯度小的参数需要大学习率加速更新",SGD无法满足;
-
仅依赖当前梯度:参数更新只看第t步的梯度,忽略历史梯度信息,容易被局部梯度波动影响(震荡),甚至陷入局部最优(比如梯度为0但不是全局最小值);
-
对学习率敏感:学习率太大,参数更新幅度过大,易震荡不收敛;学习率太小,收敛速度极慢,甚至无法收敛到最优解。
2.2 改进1:SGD + Momentum(引入动量,解决震荡与收敛慢)
Momentum(动量)的灵感来自物理中的"惯性"------物体运动时会积累速度,不会因瞬间的力而改变运动方向。对应到优化器中,就是让参数更新"记住"历史梯度的方向,结合当前梯度,减少震荡、加速收敛------本质是"对历史梯度进行加权平均,优化更新方向"。
数学公式
Momentum的参数更新分为两步,核心是"先计算动量(历史梯度+当前梯度),再用动量更新参数":
第一步:计算动量(历史梯度的加权平均,模拟惯性):
vt=γ⋅vt−1+η⋅∇L(θt)v_t = \gamma \cdot v_{t-1} + \eta \cdot \nabla L(\theta_t)vt=γ⋅vt−1+η⋅∇L(θt)
第二步:用动量更新参数(替代SGD中"直接用当前梯度更新"):
θt+1=θt−vt\theta_{t+1} = \theta_t - v_tθt+1=θt−vt
新增符号说明:
-
vtv_tvt:第t步的动量(可理解为"更新速度"),初始值v0=0v_0 = 0v0=0(刚开始训练,无历史梯度,动量为0);
-
γ\gammaγ:动量系数(通常取0.9),控制历史梯度的权重------γ\gammaγ越大,历史梯度的影响越强,惯性越明显。
优于SGD的核心数学逻辑
结合前文学到的梯度知识,我们从两个角度理解:
-
加速收敛:如果连续多步的梯度方向一致(比如都指向损失函数的全局最小值),动量vtv_tvt会不断累加(γ⋅vt−1\gamma \cdot v_{t-1}γ⋅vt−1积累历史动量,加上当前梯度的贡献),参数更新速度会越来越快,大幅提升收敛效率;
-
缓解震荡:如果梯度方向突然改变(比如局部最优附近的梯度波动,对应反向传播中梯度方向突变),动量的"惯性"(γ⋅vt−1\gamma \cdot v_{t-1}γ⋅vt−1)会抵消部分反向梯度的影响,减少参数更新的震荡幅度,避免在局部最优附近来回波动。
2.3 改进2:RMSprop(自适应学习率,解决学习率单一问题)
RMSprop的核心改进是"自适应学习率"------它通过计算"梯度平方的滑动平均",判断每个参数的梯度波动程度,进而为不同参数分配不同的有效学习率:梯度大、波动大的参数,用小学习率(避免震荡);梯度小、波动小的参数,用大学习率(加速更新)。
这里的"梯度平方",本质是利用梯度的二阶信息(其实就是二阶偏导,可以简单理解为梯度的波动程度),弥补SGD仅用一阶梯度(更新方向)的不足。
数学公式
RMSprop的参数更新分为两步,核心是"先计算梯度平方的滑动平均,再自适应调整学习率":
第一步:计算梯度平方的滑动平均(反映参数梯度的波动程度):
st=β⋅st−1+(1−β)⋅(∇L(θt))2s_t = \beta \cdot s_{t-1} + (1 - \beta) \cdot (\nabla L(\theta_t))^2st=β⋅st−1+(1−β)⋅(∇L(θt))2
第二步:自适应更新参数(除以st+ϵ\sqrt{s_t} + \epsilonst +ϵ,调整学习率):
θt+1=θt−η⋅∇L(θt)st+ϵ\theta_{t+1} = \theta_t - \eta \cdot \frac{\nabla L(\theta_t)}{\sqrt{s_t} + \epsilon}θt+1=θt−η⋅st +ϵ∇L(θt)
新增符号说明:
-
sts_tst:第t步梯度平方的滑动平均,初始值s0=0s_0 = 0s0=0;
-
β\betaβ:滑动平均系数(通常取0.99),控制历史梯度平方的权重;
-
ϵ\epsilonϵ:极小值(通常取1e-8),核心作用是"防止分母为0"(当梯度为0时,sts_tst为0,加上ϵ\epsilonϵ可避免计算错误)。
优于SGD的核心数学逻辑
对比SGD的固定学习率,RMSprop的关键改进的是"有效学习率":
SGD的有效学习率是固定的η\etaη,而RMSprop的有效学习率是ηst+ϵ\frac{\eta}{\sqrt{s_t} + \epsilon}st +ϵη------梯度越大,sts_tst越大,有效学习率越小;梯度越小,sts_tst越小,有效学习率越大。
这种自适应机制,完美解决了SGD"学习率一刀切"的缺陷,尤其适合梯度波动大的任务(如RNN训练)------这类任务中,不同时刻的梯度差异很大,SGD易震荡,而RMSprop可通过自适应学习率稳定训练。
2.4 改进3:Adam(融合动量+自适应学习率,工程首选)
Adam是目前工业界最常用的优化器,它的核心优势是"集大成者"------同时融合了Momentum的"动量积累"(利用历史梯度,加速收敛、缓解震荡)和RMSprop的"自适应学习率"(利用梯度平方,适配不同参数),还加入了"偏差修正"机制,解决初始阶段滑动平均估计偏差的问题,进一步提升训练稳定性。
数学公式
Adam的参数更新分为四步,每一步都对应着对SGD的改进,结合了Momentum和RMSprop的核心逻辑:
-
计算一阶矩(动量,完全沿用Momentum的逻辑,积累历史梯度):
mt=β1⋅mt−1+(1−β1)⋅∇L(θt)m_t = \beta_1 \cdot m_{t-1} + (1 - \beta_1) \cdot \nabla L(\theta_t)mt=β1⋅mt−1+(1−β1)⋅∇L(θt) -
计算二阶矩(梯度平方的滑动平均,完全沿用RMSprop的逻辑,反映梯度波动):
vt=β2⋅vt−1+(1−β2)⋅(∇L(θt))2v_t = \beta_2 \cdot v_{t-1} + (1 - \beta_2) \cdot (\nabla L(\theta_t))^2vt=β2⋅vt−1+(1−β2)⋅(∇L(θt))2 -
偏差修正(Adam的核心改进,解决初始阶段m_t、v_t接近0的偏差):
m^t=mt1−β1t,v^t=vt1−β2t\hat{m}_t = \frac{m_t}{1 - \beta_1^t}, \quad \hat{v}_t = \frac{v_t}{1 - \beta_2^t}m^t=1−β1tmt,v^t=1−β2tvt -
更新参数(融合动量和自适应学习率):
θt+1=θt−η⋅m^tv^t+ϵ\theta_{t+1} = \theta_t - \eta \cdot \frac{\hat{m}_t}{\sqrt{\hat{v}_t} + \epsilon}θt+1=θt−η⋅v^t +ϵm^t
默认超参数(工程中几乎无需调整,记牢即可):
-
β1=0.9\beta_1 = 0.9β1=0.9(一阶矩系数,对应Momentum的γ\gammaγ,控制动量积累);
-
β2=0.999\beta_2 = 0.999β2=0.999(二阶矩系数,对应RMSprop的β\betaβ,控制梯度平方的滑动平均);
-
ϵ=1e−8\epsilon = 1e-8ϵ=1e−8(防止分母为0);
-
η=0.01\eta = 0.01η=0.01(基础学习率,自适应机制会动态调整有效学习率)。
优于SGD的核心数学逻辑(综合优势)
Adam的优势是"三者兼顾",完美解决SGD的所有核心缺陷:
-
兼顾动量与自适应:既像Momentum一样,通过积累历史梯度加速收敛、缓解震荡;又像RMSprop一样,通过梯度平方的滑动平均,为不同参数分配自适应学习率;
-
偏差修正:初始训练阶段(t较小时),m_t和v_t的值接近0,偏差修正可以放大初始梯度的影响,让训练初期的更新更稳定,避免收敛过慢;
-
鲁棒性强:对基础学习率η\etaη不敏感,无需像SGD那样反复调试学习率,默认参数即可适配绝大多数模型和数据集。
三、代码实战:优化器的使用
结合前文学到的激活函数、神经网络结构知识,我们仍以"拟合非线性数据(y=x²+噪声)"为例,用PyTorch实现SGD、Momentum、RMSprop、Adam四种优化器,重点详解各优化器的参数配置、输入输出,以及训练效果对比。
3.1 环境准备与数据生成
我们沿用前文中"激活函数"章节的非线性数据,同时定义一个简单的非线性网络(2层全连接+ReLU激活),适配所有优化器的训练。
python
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
# 设置matplotlib参数
plt.rcParams['figure.figsize'] = (12, 8)
plt.rcParams['font.size'] = 12
plt.style.use('seaborn-v0_8')
# 设置中文字体显示
plt.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
# 固定随机种子,保证结果可复现
torch.manual_seed(42)
# 1. 生成非线性数据(y = x² + 噪声)
x = torch.linspace(-3, 3, 100).unsqueeze(1) # 输入:(100, 1),适配网络输入维度
y = x**2 + torch.randn(100, 1) * 0.1 # 标签:(100, 1),加入噪声模拟真实数据
# 2. 定义简单的非线性网络(2层全连接+ReLU激活)
class SimpleNet(nn.Module):
def __init__(self):
super(SimpleNet, self).__init__()
self.fc1 = nn.Linear(1, 20) # 输入层→隐藏层:1维输入,20个隐藏神经元
self.fc2 = nn.Linear(20, 1) # 隐藏层→输出层:20维输入,1维输出
self.relu = nn.ReLU() # 非线性激活函数(前文学过,保证网络非线性)
def forward(self, x):
# 前向传播流程:线性变换→ReLU激活→线性变换
out = self.relu(self.fc1(x))
out = self.fc2(out)
return out3.2 优化器初始化:参数详解与配置
所有优化器的核心输入的是"模型参数"和"学习率",进阶优化器的额外参数均为前文数学公式中的超参数(如momentum、betas),我们逐一对应
python
# 初始化4个相同结构的模型(分别用不同优化器训练,保证对比公平)
model_sgd = SimpleNet()
model_momentum = SimpleNet()
model_rmsprop = SimpleNet()
model_adam = SimpleNet()
# 1. SGD优化器(基础版,对应前文数学公式)
# 核心参数:params=模型参数(必须,通过model.parameters()获取),lr=学习率(必须)
optimizer_sgd = torch.optim.SGD(model_sgd.parameters(), lr=0.01)
# 2. SGD + Momentum优化器(对应前文Momentum数学公式)
# 额外参数:momentum=动量系数(对应公式中的γ,默认0,通常设0.9)
optimizer_momentum = torch.optim.SGD(model_momentum.parameters(), lr=0.01, momentum=0.9)
# 3. RMSprop优化器(对应前文RMSprop数学公式)
# 核心参数:lr=学习率,alpha=滑动平均系数(对应公式中的β,默认0.99),eps=1e-8
optimizer_rmsprop = torch.optim.RMSprop(model_rmsprop.parameters(), lr=0.01, alpha=0.99, eps=1e-8)
# 4. Adam优化器(对应前文Adam数学公式)
# 核心参数:lr=学习率,betas=(β1, β2)(默认(0.9, 0.999),对应公式中的两个系数),eps=1e-8
optimizer_adam = torch.optim.Adam(model_adam.parameters(), lr=0.01, betas=(0.9, 0.999), eps=1e-8)
# 统一损失函数:均方误差(MSE),适配回归任务(拟合y=x²)
criterion = nn.MSELoss()
# 存储各优化器的损失变化(用于后续对比收敛速度,衔接前文梯度下降的损失变化逻辑)
loss_history = {
'SGD': [],
'Momentum': [],
'RMSprop': [],
'Adam': []
}
# 打包模型、优化器、优化器名称,方便后续批量训练
models = [model_sgd, model_momentum, model_rmsprop, model_adam]
optimizers = [optimizer_sgd, optimizer_momentum, optimizer_rmsprop, optimizer_adam]
optimizer_names = ['SGD', 'Momentum', 'RMSprop', 'Adam']3.3 训练过程:优化器的核心使用逻辑
无论哪种优化器,核心使用流程完全一致,重点记住三步:清空梯度→反向传播计算梯度→优化器更新参数,区别仅在于初始化时的参数配置。
python
# 训练次数:1000次(足够看到明显的收敛差异)
epochs = 1000
for epoch in range(epochs):
# 批量训练4个模型(分别用4种优化器)
for i, (model, optimizer, name) in enumerate(zip(models, optimizers, optimizer_names)):
model.train() # 开启训练模式(工程实操必备,确保 dropout、BN 等模块正常工作)
# 1. 前向传播:输入x,得到模型预测值y_pred
y_pred = model(x)
# 2. 计算损失:对比预测值y_pred和真实值y,用MSE衡量误差
loss = criterion(y_pred, y)
# 3. 清空梯度(必须!否则梯度会累加,导致参数更新异常,衔接反向传播知识)
optimizer.zero_grad()
# 4. 反向传播:计算各层参数的梯度(前文重点讲解,PyTorch自动实现链式法则)
loss.backward()
# 5. 优化器更新参数(核心步骤:不同优化器的数学更新逻辑,在这一步自动实现)
optimizer.step()
# 记录当前epoch的损失,用于后续可视化
loss_history[name].append(loss.item())
# 每200次打印一次损失,观察训练进度(工程实操常用)
if (epoch + 1) % 200 == 0:
print(f"Epoch {epoch+1}/{epochs}")
for name in optimizer_names:
print(f"{name} 损失:{loss_history[name][-1]:.4f}")
print("-" * 30)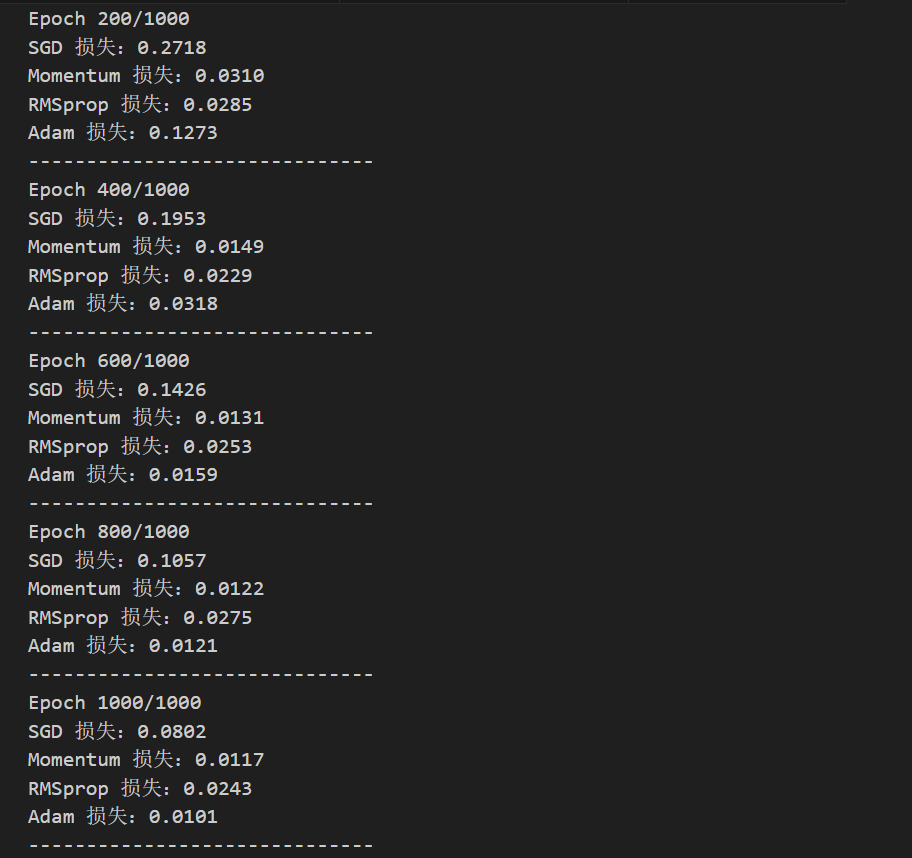
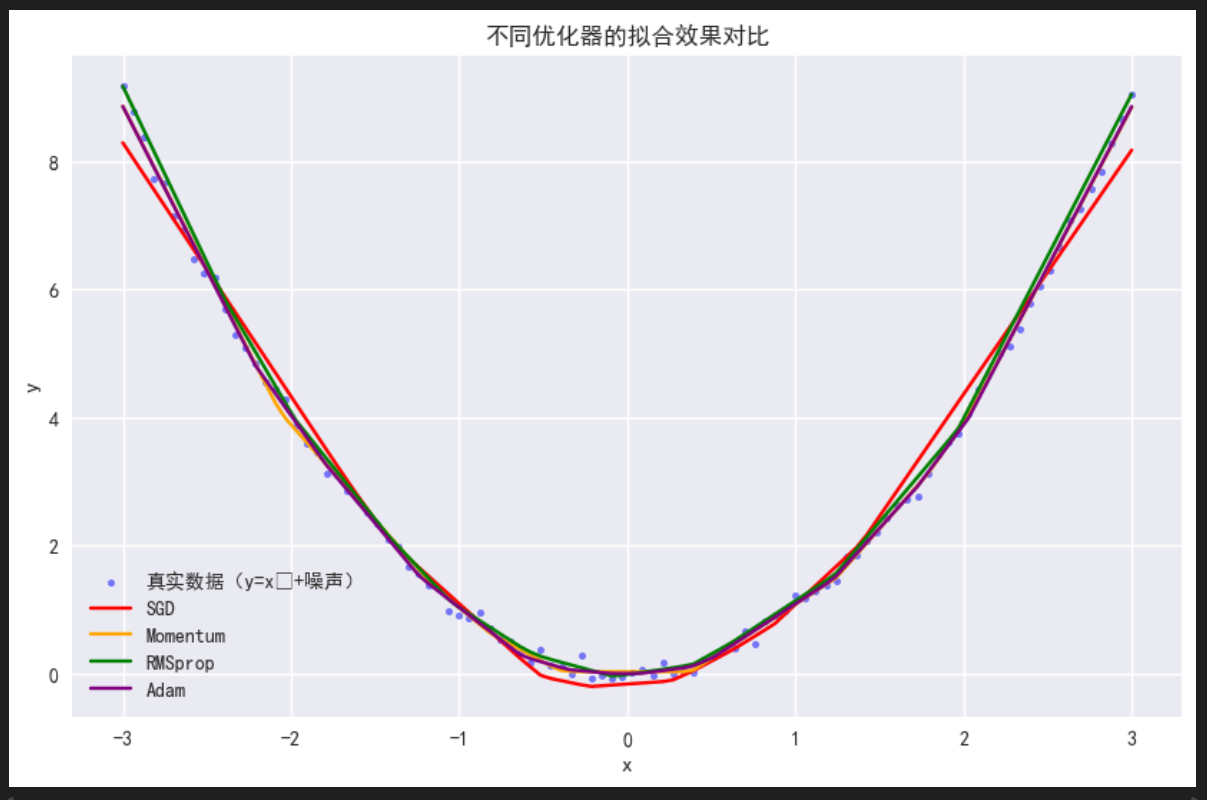
3.4 结果可视化:对比各优化器的收敛速度
我们通过两个图对比:① 损失变化曲线(看收敛速度,对应数学原理中的"加速收敛");② 拟合效果曲线(看模型性能,对应前文激活函数的拟合能力)。
python
# 1. 绘制损失变化曲线(核心对比:收敛速度)
plt.figure(figsize=(10, 6))
for name in optimizer_names:
plt.plot(loss_history[name], label=name)
plt.xlabel('训练步数(Epoch)')
plt.ylabel('损失值(MSE)')
plt.title('不同优化器的收敛速度对比(损失越小,拟合效果越好)')
plt.legend()
plt.grid(True, alpha=0.3) # 添加网格,便于观察
plt.show()
# 2. 可视化各优化器的拟合效果(
plt.figure(figsize=(10, 6))
plt.scatter(x.numpy(), y.numpy(), s=10, color='blue', alpha=0.5, label='真实数据(y=x²+噪声)')
# 关闭梯度计算(预测时无需计算梯度,节省资源)
with torch.no_grad():
y_pred_sgd = model_sgd(x)
y_pred_momentum = model_momentum(x)
y_pred_rmsprop = model_rmsprop(x)
y_pred_adam = model_adam(x)
# 绘制各优化器的预测曲线
plt.plot(x.numpy(), y_pred_sgd.numpy(), color='red', label='SGD')
plt.plot(x.numpy(), y_pred_momentum.numpy(), color='orange', label='Momentum')
plt.plot(x.numpy(), y_pred_rmsprop.numpy(), color='green', label='RMSprop')
plt.plot(x.numpy(), y_pred_adam.numpy(), color='purple', label='Adam')
plt.xlabel('x')
plt.ylabel('y')
plt.title('不同优化器的拟合效果对比')
plt.legend()
plt.show()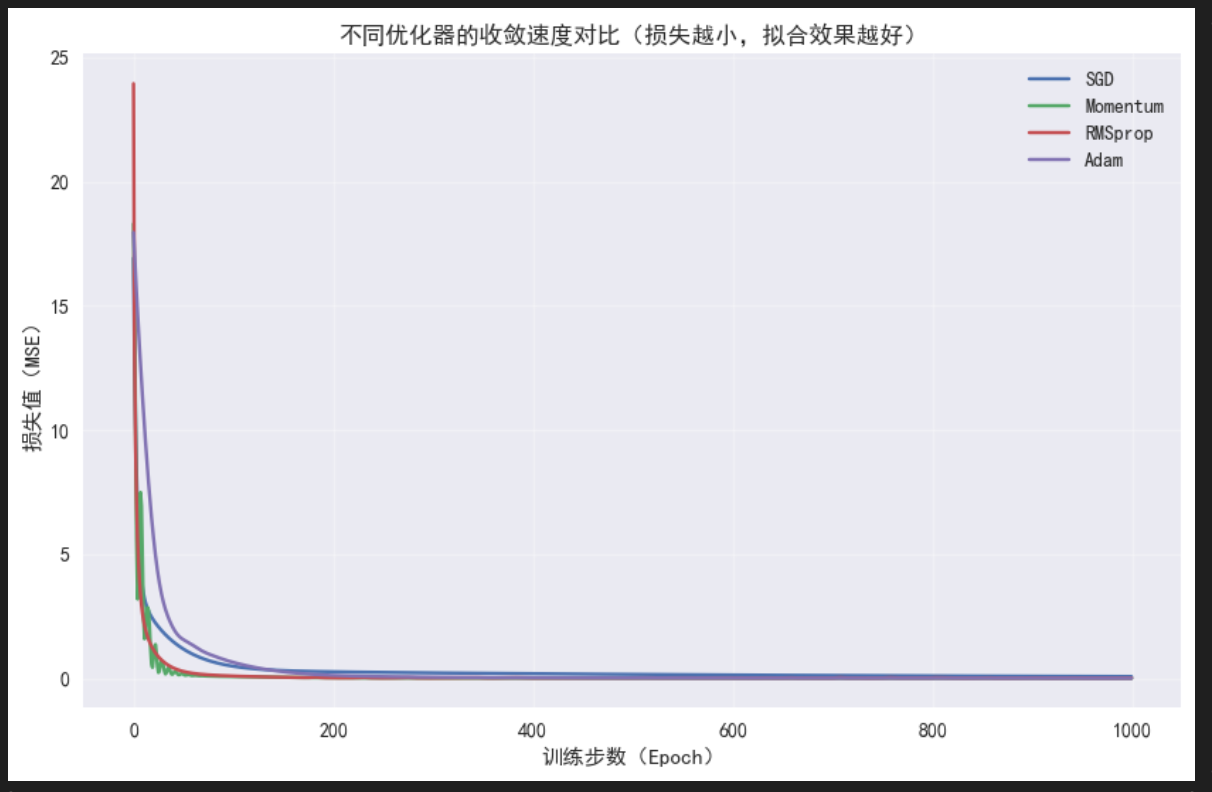
3.5 代码关键说明
结合前文学识和代码,重点说明3个核心点:
1. 优化器输入:
-
必选输入:params(模型参数,通过model.parameters()获取,是可迭代的参数列表,对应前文需要更新的权重w、偏置b)、lr(基础学习率,控制初始更新幅度);
-
可选输入:所有可选参数均对应前文数学公式中的超参数(如momentum对应γ\gammaγ,betas对应β1\beta_1β1和β2\beta_2β2),默认值已适配绝大多数场景,无需刻意调整。
2. 优化器核心方法:
-
zero_grad():清空所有参数的梯度,必须在loss.backward()(反向传播)前调用,否则梯度会累加,导致参数更新异常;
-
step():执行参数更新,内部自动实现对应优化器的数学逻辑(如Adam的四步更新、Momentum的动量计算);
-
输出:无返回值,直接修改模型的参数(model.parameters()),无需手动赋值。
3. 结果分析:
-
收敛速度:Adam ≈ RMSprop > Momentum > SGD,完美契合我们前文的数学推导------Adam融合了动量和自适应学习率,收敛最快;
-
拟合效果:Adam和RMSprop的预测曲线最贴合真实数据(当然该例子比较简单,Momentum 拟合的也很好,实际上比RMSprop还要好一些),SGD的曲线震荡最明显,说明进阶优化器的改进有效解决了SGD的缺陷。
四、总结
本节课是专栏"深度学习的数学原理"的第七篇内容,我们衔接前文的梯度下降、反向传播、激活函数知识,完成了"参数更新"的闭环------从"如何计算梯度"(反向传播),到"如何利用梯度更新参数"(优化器),彻底打通了深度学习训练的核心逻辑。
核心总结:
-
进阶优化器的核心逻辑:均基于SGD的梯度下降思想,通过"利用历史梯度(动量)""自适应学习率""偏差修正"等数学改进,解决SGD的收敛慢、易震荡、对学习率敏感的缺陷;
-
数学与实操的对应:Momentum的核心是"动量积累"(vtv_tvt),RMSprop的核心是"梯度平方的滑动平均"(sts_tst),Adam的核心是"融合两者+偏差修正",代码中的参数与数学公式一一对应;
-
优先使用Adam(适配绝大多数场景,无需大量调参),实际上,优化器在目前封装的非常好,Adam效果也比较不错,在大部分情况下都可以直接使用