一句话总结原理
现在市面上99%的MEMS加速度计都是电容式的:
惯性让小质量块发生微小位移------>改变电容------>电容变化转换成电信号------>算出加速度
MEMS加速度计 == 微型牛顿第二定律测试仪
一、结构原理
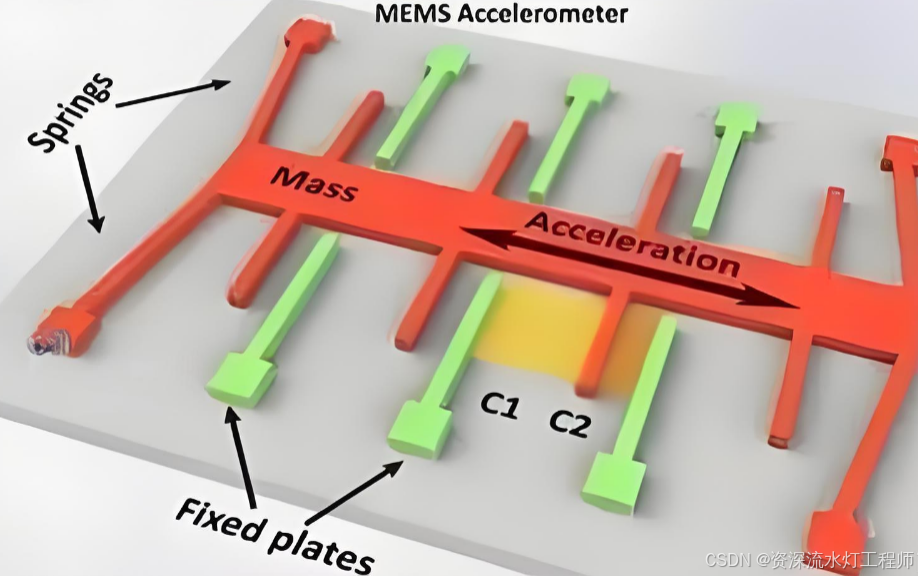
芯片内部是用硅刻出来的微型机械结构,核心就4样东西:
1、可动质量块(惯性快)
中间一块小重物,悬空,能前后,或者左右移动
2、弹性梁(微型弹簧)
拉住质量块,让它能动,但又不会乱动。
3、固定电极
贴在芯片基底上,不动
二、
跟质量块在一起,质量块动,它就跟着动
最经典的结构:
梳齿状,又名交叉电容结构
对应的文字版结构示意图
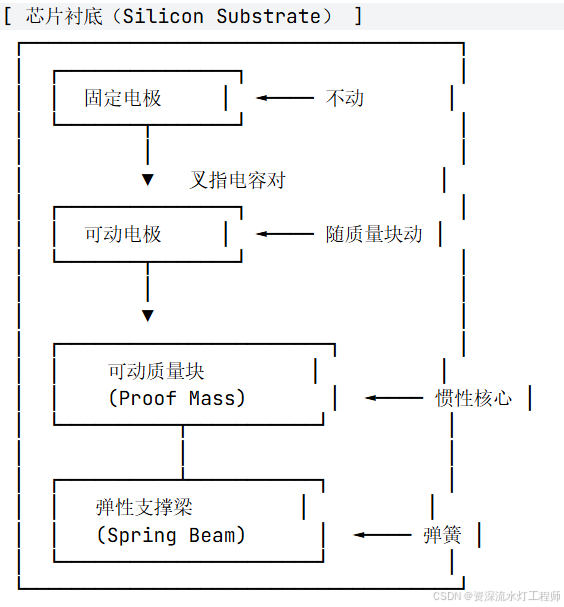
两轴或者三轴的就是把这个结构在XYZ三个方向上各做一套,或者集成一体。
二、工作原理
完全按照牛顿第二定律 F = ma 来:
1、没加速度 / 匀速运动
质量块不动------>电极间间距不变------>电容稳定
2、一有加速度
质量块因为惯性,会滞后一下,相对固定电极产生纳米级的微小位移
3、位移导致电容变化
电极的重叠面积,或者电极的间距变化,使电容C产生变化。
4、芯片内部ASIC电路
把电容变化------>转成电压------>转成数字信号,直接输出:加速度值 g 或 m/s²
简单的对应关系如下
加速度 a ↑ → 质量块位移 x ↑ → 电容变化 ΔC ↑
芯片直接读ΔC就知道加速度有多大
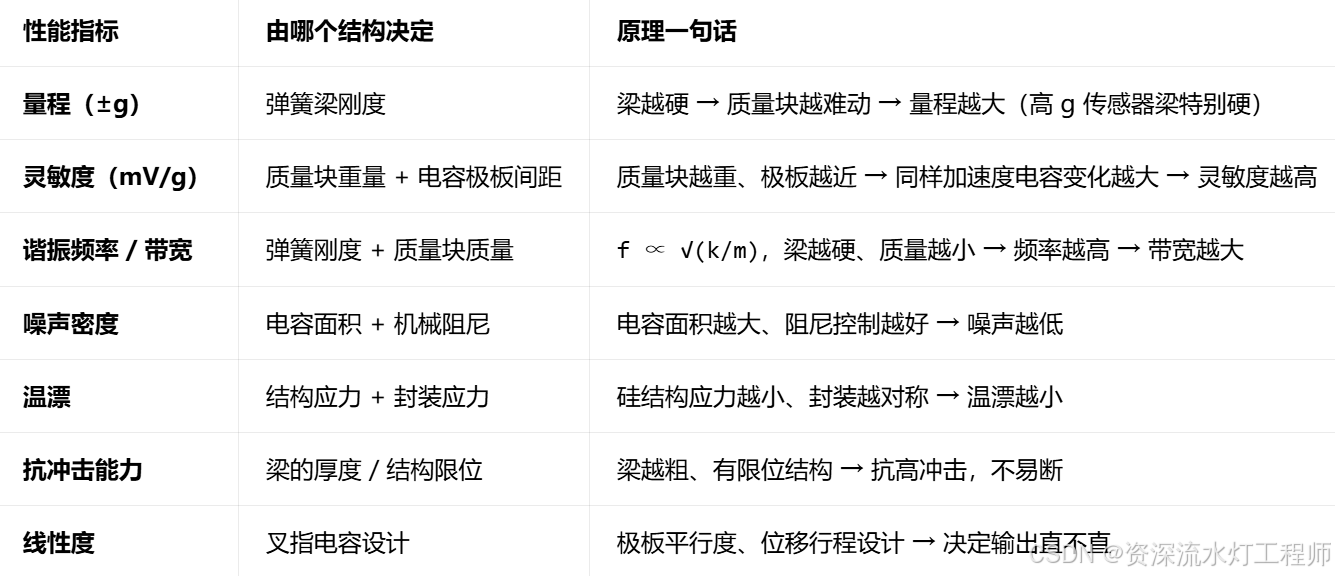
三、加速度计的参数指标与结构的关系
四、牛顿第二定律与MEMS加速度计的关系
1、回顾下牛顿第二定律
物体的加速度,与它受到的合外力成正比,与它的质量成反比;加速度方向与合外力方向一致。
公式: F = m x a
2、三个最关键的理解
1、力 → 产生加速度
没有力,就没有加速度(静止或匀速直线运动)。
2、质量越大,越难被加速
质量是惯性的量度:越重,越 "不愿意" 改变运动状态。
3、方向严格一致
加速度朝哪,合外力就朝哪。
3、MEMS加速度计与牛二的对应关系
1、芯片里谁是m
**可动质量块(Proof Mass)**它就是那个 "有惯性、不愿意乱动" 的小质量。
2、芯片里谁是a
你要测的外界加速度:手机晃了/机器震动了/汽车急加速 / 急刹车,这些都是输入的a.
3、芯片里谁是F
惯性力 + 弹簧的回复力
当外界给加速度 a,质量块因为惯性滞后 ,会对弹簧产生一个惯性力:F惯=m⋅a
4、弹簧与F的平衡关系
弹簧被拉动,产生弹性回复力:F弹=k⋅x
k:弹簧刚度
x:质量块的位移
5、最终平衡
稳定时,二力平衡:m⋅a=k⋅x
4、MEMS加速度计的全部原理
加速度 a → 让质量块产生惯性力 → 拉动弹簧产生位移 x → x 与 a 严格成正比 → 用电容测出 x → 反推出 a。
MEMS加速计的全部结构就是为了测试那个x,从而算出那个a
五、MEMS加速度计的核心( 位移 x → 电容变化 ΔC )
绝大多数 MEMS 加速度计用差动电容结构:
- 上电容:C1
- 下电容:C2
- 静止时:C1=C2=C0
质量块向上动 x:
- C1 变大
- C2 变小
小位移下线性近似 :ΔC= C1−C2 ∝ x
六、MEMS加速度计的工程标定
加速度常用 g 作单位:
反算加速度
六位置静态标定法
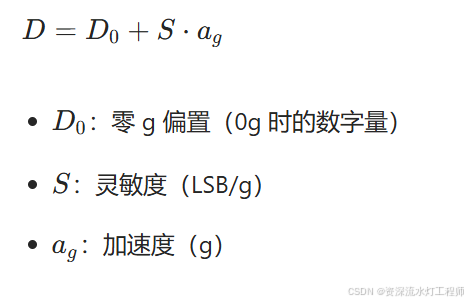
通过标定得到零偏 D0 和灵敏度 S ,并能用代码把加速度计输出的数字量 D 转换成实际加速度值 ag,这套方案是消费 / 工业级 MEMS 加速度计最常用的静态标定法,测试设备(如转台、水平台)都适配。
标定的本质就是:
1、测不同已知加速度下的数字量 D
2、用线性拟合算出 D0(零 g 偏置)和 S(灵敏度,LSB/g)
标定的前置条件:
- 测试设备:高精度水平台 / 转台(精度≥0.01°)
- 标定轴:以 Z 轴为例(X/Y 轴同理)
- 已知加速度:利用重力加速度 g,通过摆放角度得到固定加速度
标定步骤:
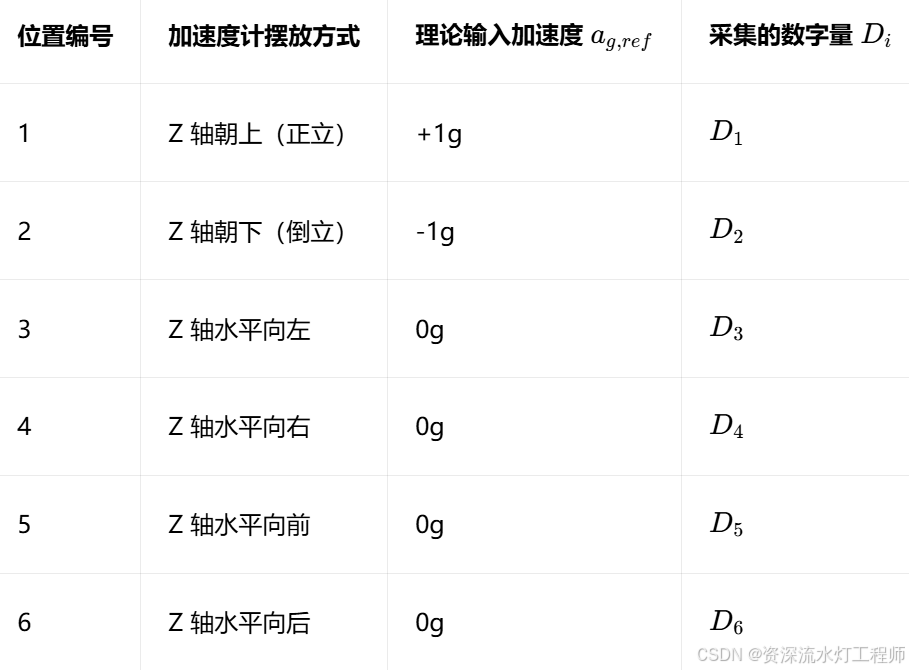
操作细节
- 每个位置稳定后,采集至少 100 组数据,取平均值作为 Di(减少噪声)
- 摆放时保证轴与重力方向严格平行 / 垂直(转台角度误差≤0.1°)
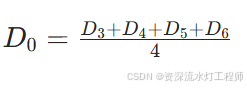
标定计算公式
1、取 4 个 0g 位置的平均值:
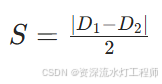
2、计算灵敏度 S(数字量 /g)
用 ±1g 位置的差值:
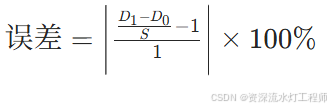
3、验证线性度误差
线性度误差